基于改進CNN 和ViT 網絡的復合工況示功圖診斷技術研究
2022-05-25 00:51:16錢帥康陳夕松邵志良李緒信史敦禹
石油化工應用 2022年4期
錢帥康,陳夕松,姜 磊,邵志良,李緒信,史敦禹
(1.東南大學自動化學院,江蘇南京 210096;2.南京富島信息工程有限公司,江蘇南京 210061;3.中策橡膠(建德)有限公司,浙江杭州 311600)
抽油機是原油開采的主要設備,研究抽油機故障診斷對維護安全生產,節能增效具有重要價值。目前抽油機故障診斷領域較為常用且有效的手段是基于示功圖的分析與識別[1]。但傳統基于人工分析的示功圖診斷方法存在實時性差、診斷精度嚴重依賴專家經驗等問題。近年來,卷積神經網絡(Convolutional neural network,CNN)由于具有模型參數量較少,能夠通過訓練卷積核自動地提取圖像特征的特點,已開始用于抽油機故障診斷。劉寶軍[2]提出了基于卷積神經網絡的示功圖診斷技術,對供液不足、氣體影響等常見工況的診斷識別正確率達到89.3%。何巖峰等[3]提出了使用CNN模型對抽油機進行故障診斷的方法,在識別精度進一步提高的同時還提升了運算效率。
然而,基于CNN 的方法目前多集中于單一工況示功圖的診斷,針對復合工況研究較少。實際上,采油企業不僅希望能了解到抽油機的單一工況,更希望掌握到更精細的復合工況,使企業能夠更精細化地管理抽油機生產,以達到節能增產的目的。但由于CNN 本身結構的特性導致其全局建模能力較弱,對于復合工況示功圖的診斷精度仍有待提高。近年來,Transformer 已開始應用于圖像識別并取得了良好效果,形成了新的圖像識別網絡-視覺Transformer(Vision Transformer,ViT)。由于ViT 使用自注意力機制進行計算,天然具有較好的全局建模能力。因此,本文研究了改進CNN 和ViT的復合工況示功圖診斷方法,以彌補傳統CNN 在復合工況下診斷效果不佳的不足。
1 基于改進CNN 和視覺Transformer 網絡的診斷模型
1.1 改進的卷積神經網絡
典型卷積神經網絡通常由卷積層、池化層、全連接層組成。卷積層用于提取輸入圖像的特征圖,其方形卷積核結構(如3×3,5×5 等)在圖像矩陣上進行滑動窗口計算,能保證圖像中的每個位置都進行了特征提取。池化層用于減小特征圖的分辨率,以達到減少網絡參數的目的。全連接層用于將提取出的所有特征圖進行整合并映射為特征向量,以實現圖像表征或分類。由于ResNet[4]具有殘差塊結構,即使層數很深的網絡也能夠很好的訓練,不會出現模型退化問題,且其網絡結構簡單,可擴展性高,所以選擇ResNet-50 網絡作為本論文的基線模型。
通過分析示功圖,發現其存在顏色單一、圖形僅為封閉曲線的特點。目前CNN 都采用小的方形卷積核來提取圖像特征,這種卷積核無法很好地提取整體曲線特征,導致難以達到較高的診斷精度。而想要更好地提取整體線條特征一般需要更大的卷積核,但隨著卷積核的增大,網絡參數也會急劇增加,導致模型訓練時間延長,存儲空間增加。論文設計了非方的n×m 和m×n卷積核,包括7×3 和3×7 卷積核,并以此構建如圖1 所示的,A、B 兩種殘差塊。通過兩種殘差塊交替堆疊的方式,在僅增加少量參數量的前提下,提升了網絡提取示功圖特征的能力。

圖1 具有非方卷積核的兩種殘差塊
1.2 混合網絡結構模型
改進的CNN 雖能較好的提取示功圖局部特征,但復合工況示功圖無法僅通過局部特征去識別,而是要從整體上去觀察,才能獲得準確的診斷結果,故研究通過增加ViT 網絡來獲得更好的診斷精度。ViT 首次將Transformer 用在圖像識別領域,由于其獨特的多頭注意力機制,具有良好的全局建模能力,可以更有效提取復合工況示功圖整體曲線特征。但直接訓練ViT,往往需要百萬甚至千萬級別帶標簽數據集,才能表現出超越CNN 的性能,否則會出現嚴重過擬合現象。而獲取如此量級的帶標簽示功圖數據集是很昂貴的,需要消耗大量的人力和物力。論文設計了融合改進CNN 和ViT 的混合結構,在利用自注意力機制的同時,減小了對大量數據的依賴,其結構體參數(見表1)。
表1 中,O_C 代表輸出通道數,k 代表卷積核尺寸,s 代表卷積步幅,Act 代表激活函數,In 和Out 分別代表全連接層的輸入和輸出。混合神經網絡具有17 層卷積層,第一個卷積層為具有7×7 卷積核的普通卷積層,后接一個最大池化層用來降低特征圖尺寸,減少網絡參數。然后交替堆疊殘差塊A 和殘差塊B,更有效地提取示功圖局部特征。為了簡化工程實現,用單個具有14×14 卷積核的卷積層作為圖像塊嵌入層,卷積核大小即為圖像塊大小,卷積步幅為14×14,可以實現無重疊的分塊功能。實驗發現,對卷積層提取的特征圖先進行取平均,再進行嵌入,不僅能大幅減少網絡參數量,減少過擬合風險,而且能達到更好的精度。混合網絡一方面能獲得CNN 有效提取局部特征,在少量數據下仍能有效訓練的優點,另一方面能獲得ViT 對全局特征提取的能力,為復合工況示功圖診斷提供了有力且高效的模型(見圖2)。

圖2 混合神經網絡結構

表1 混合網絡架構具體參數
2 示功圖診斷流程
單一工況示功圖類別多達數十種,而復合工況更是高達成百上千種。若采用一般的圖像識別分類方法進行復合工況示功圖診斷,需要為每個復合工況給定一個標簽,則網絡最終的輸出維度會達到上百維甚至上千維,會導致預測效果不佳。且一些非典型復合工況只有很小的概率會出現,所以無法獲取到所有類別的復合示功圖數據。而基于相似識別的方法,可以通過比較圖片之間的差異,提取出不同類別圖像的特征向量,計算特征向量之間的相似度,從而進行圖像的細粒度分類。不會出現全連接層輸出維度過高,從而導致精度下降的問題。且對于樣本數量較少,甚至沒有出現在訓練集中的復合工況,也可以借助檢索庫,正確實現診斷。基于以上原因,本文采用基于相似度識別的示功圖診斷方案[5],具體流程圖(見圖3)。
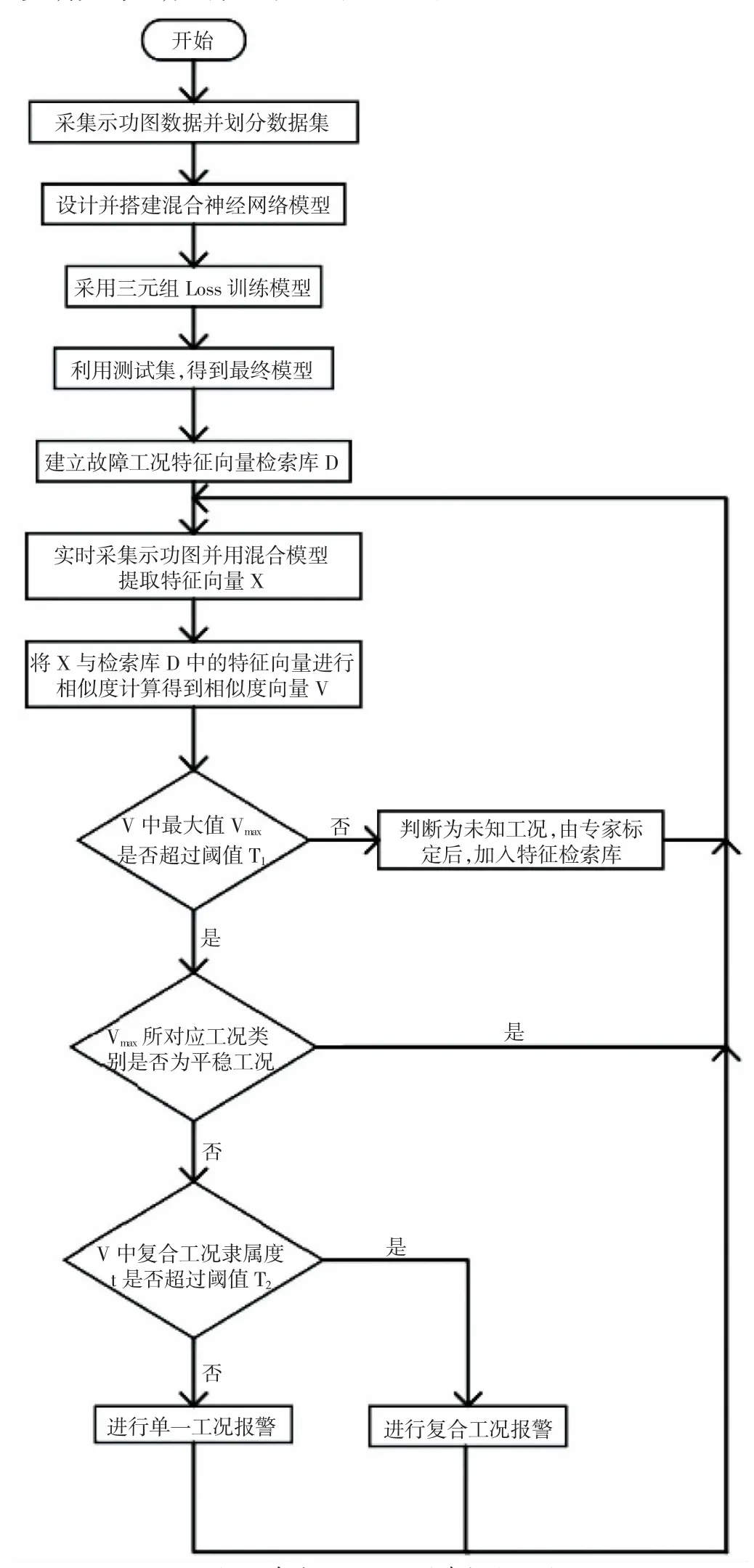
圖3 復合工況示功圖診斷流程圖
2.1 數據預處理
將采集到的原始示功圖數據進行異常值剔除,僅保留正常示功圖二維數據。對過濾后的示功圖二維載荷數據a=[a1,a2,…,ai]和位移數據b=[b1,b2,…,bi]
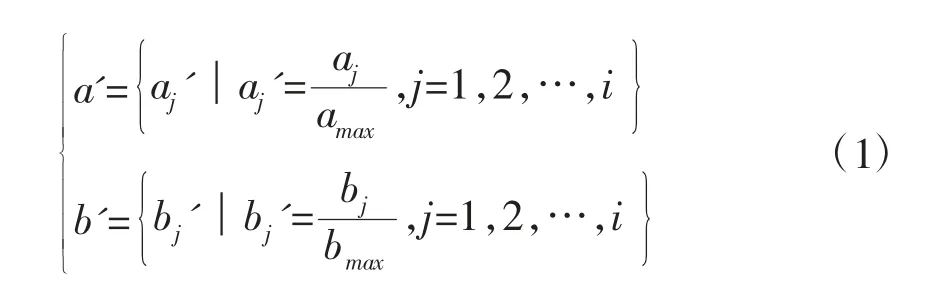
式中:i-每個示功圖數據的采樣點數;amax-抽油機的最大載荷;bmax-抽油機的最大沖程。為了得到W×H大小的示功圖圖像,需要將歸一化后的數據點映射到二維圖像坐標上,并以圖像左下角為原點。數據點乘以圖像寬高后,向下取整,即為歸一化數據點在圖像中對應的坐標值。將所有坐標繪制在圖像中后,使用曲線將所有數據點進行連接,形成首尾相連的封閉曲線,所繪制示功圖(見圖4)。本論文中示功圖尺寸選擇W=H=224。

圖4 繪制的示功圖
2.2 數據集劃分與模型訓練
將采集的所有示功圖數據繪制成示功圖圖像,并根據示功圖圖形相似度劃分成不同類別。將分類后的數據集以8:1:1 的比例進行訓練集、驗證集和測試集的劃分,從訓練集中在線選取三元組進行上述混合神經網絡模型的訓練,三元組的選取步驟如下:
(1)隨機從訓練集中選取屬于同一個類別的子集,并隨機選擇該子集中的某個樣本作為錨點樣本xA。從同一個子集中,再隨機選取與錨點樣本不同的另一個樣本作為正樣本x+。隨機從訓練集中選取與錨點樣本不同類別的另一類子集,并隨機選擇該子集中的某個樣本作為錨點樣本x-。
(2)將xA、x+和x-組成一個三元組(xA,x+,x-),重復步驟(1)、(2)、(3),直到所有數據都組成三元組。
(3)對每個三元組中的圖像使用混合神經網絡進行特征提取,得到三個特征向量,使用三元組損失對混合神經網絡進行訓練,三元組損失公式如下:

式中:h+-正樣本和錨樣本向量之間的歐式距離;h--負樣本和錨樣本向量之間的歐式距離;m-固定間距。
2.3 實時復合工況示功圖診斷
由工藝專家標定數據集中的典型故障工況,并使用訓練完成的混合神經網絡模型對典型故障示功圖進進行歸一化處理,歸一化公式如下:行特征提取,建立故障工況特征檢索庫。對實時采集的示功圖數據進行實時工況診斷的步驟如下:
(1)對實時采集的示功圖數據使用混合網絡模型提取特征向量xnew,并與工況特征檢索庫中的特征向量進行余弦相似度計算,得到相似度向量V。
(2)判斷V 中最大值Vmax是否超過主工況閾值T1,是則將該最大值對應的類別作為示功圖的主工況K,否則將此示功圖類別標記為未知,由專家標定后加入工況特征檢索庫中。
(3)將V 中除Vmax外的值定義為復合工況隸屬度t,判斷t 是否超過復合工況閾值T2,是則判定此示功圖為復合工況,包含次要工況Ki,否則為單一工況示功圖。
(4)判斷K 是否為故障工況,如果為平穩工況,則不報警,如果為故障工況,判斷是否包含Ki,是則進行復合故障工況報警,否則進行單一故障工況報警。
3 應用研究
本文選取某采油企業2021 年7 月至9 月的示功圖數據進行實驗,分析本文方法對復合工況示功圖診斷的有效性。根據采集到的示功圖數據,進行數據預處理,繪制得到共45 429 張示功圖圖像。以相似度為依據分類數據集后,將數據集劃分為訓練集36 343 張、驗證集4 543 張和測試集4 543 張。從訓練集中采樣三元組,使用三元組損失對混合神經網絡進行訓練,得到的損失值曲線(見圖5)。使用混合神經網絡對測試集示功圖提取特征,根據與故障特征檢索庫中的特征向量進行相似度計算,以完成示功圖診斷,診斷精度(見表2)。

表2 混合神經網絡在測試集上的診斷精度
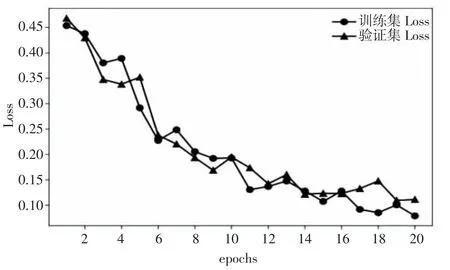
圖5 混合神經網絡損失曲線圖
為了驗證本文模型的泛化能力以及相較原始模型的有效性,從產油企業2021 年10 月數據中選取2 000張未出現在訓練集中的單一和復合工況示功圖數據,以相同的方式進行診斷,得到多模型對比結果(見表3)。
根據表3 分析,原始ResNet50 網絡對復合工況的診斷精度較低,僅為81.50%,改進的ResNet 雖有提升,診斷精度仍達不到要求,僅為85.25%,而混合結構神經網絡復合工況診斷精度取得了較大的提升,達到了92.75%。三種網絡在單一工況示功圖下都取得了較高的診斷精度,而混合結構神經網絡仍達到了最高的96.5%。由上述分析可知,本文設計的混合結構神經網絡具有較好的示功圖特征提取能力,不僅能提升整體診斷精度,而且對復合工況示功圖診斷精度具有很大提升,為抽油機故障診斷提供了更準確和有效的手段。

表3 多模型在新測試集上的診斷精度對比結果
4 結論
本文提出了一種基于改進CNN 和ViT 網絡的復合工況示功圖診斷技術,設計的混合神經網絡模型能夠較好地提取復合工況示功圖特征,對實時采集的示功圖使用混合網絡進行特征提取,根據提取的特征與特征檢索庫中的特征向量進行相似度計算,得到相似度向量。通過相似度向量,判定示功圖類型,并進行單一或復合工況故障診斷。實驗結果表明,該方法提出的混合網絡結構在測試集上診斷精度達到95%以上,能顯著提升復合工況示功圖的診斷精度,使企業能夠更加精細化、集約化地管理抽油機生產,建立更為合適的抽油機工作制度,以達到節能增產的目的。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
計算機測量與控制(2017年6期)2017-07-01 16:24:20
中國煤層氣(2014年6期)2014-08-07 03:07:05
河南科技(2014年23期)2014-02-27 14:19:15