計(jì)及下垂控制的潮流計(jì)算研究綜述
2022-05-26 08:58:34易文飛卜強(qiáng)生
電力工程技術(shù) 2022年3期
易文飛, 卜強(qiáng)生
(國網(wǎng)江蘇省電力有限公司電力科學(xué)研究院,江蘇 南京 211103)
0 引言
潮流計(jì)算是電力系統(tǒng)分析的基礎(chǔ)。利用潮流計(jì)算得到的潮流分布,可對電網(wǎng)運(yùn)行控制與電網(wǎng)狀態(tài)進(jìn)行在線分析與預(yù)測,因此電力系統(tǒng)要不斷發(fā)展就必然要求潮流計(jì)算技術(shù)不斷更新[1]。
隨著電力市場化改革的不斷推進(jìn)、光伏與風(fēng)力發(fā)電等分布式電源(distributed generation,DG)的大規(guī)模并網(wǎng),以DG為代表的下垂控制設(shè)備占比逐漸增高,電力系統(tǒng)發(fā)生了以下變化:(1) 配電網(wǎng)潮流由輻射型網(wǎng)絡(luò)變?yōu)槎嚯娫袋c(diǎn)型網(wǎng)絡(luò)、由單向潮流變?yōu)殡p向潮流;(2) 運(yùn)行特性的改變具有不確定性;(3) 以下垂控制方式運(yùn)行時頻率不再固定,相關(guān)線路參數(shù)隨頻率發(fā)生變化[2]。由此可見,DG接入雖給電網(wǎng)帶來供電新活力,為電力負(fù)荷高峰提供支持,但其運(yùn)行特性的多變性導(dǎo)致數(shù)學(xué)模型變得更為復(fù)雜,給潮流計(jì)算工作帶來了挑戰(zhàn)。當(dāng)計(jì)算含有下垂控制特性設(shè)備的電網(wǎng)潮流時,現(xiàn)有研究都是先建立相應(yīng)設(shè)備的精確模型[3];再考慮不同類型的設(shè)備在運(yùn)行特性上的區(qū)別,將具有下垂控制特性的設(shè)備或節(jié)點(diǎn)處理成常規(guī)潮流計(jì)算中的節(jié)點(diǎn)類型,即PQ節(jié)點(diǎn)、PV節(jié)點(diǎn)、平衡節(jié)點(diǎn);最后列寫潮流功率方程,選取合適的計(jì)算方法進(jìn)行求解。
文中從電力系統(tǒng)中下垂控制的基本原理出發(fā),首先分析了現(xiàn)有潮流計(jì)算對下垂控制節(jié)點(diǎn)的處理方法,然后從下垂控制模型、網(wǎng)絡(luò)方程構(gòu)建、元件參數(shù)頻率變化、計(jì)算方法4個維度進(jìn)行分析和總結(jié),指出了現(xiàn)有建模和求解方法存在的問題。最后,結(jié)合電力系統(tǒng)潮流計(jì)算新需求,提出在建模方面建立統(tǒng)一化計(jì)算模型,在求解算法方面可采用數(shù)學(xué)規(guī)劃方法進(jìn)行求解,但須結(jié)合實(shí)際場景進(jìn)一步完善。
1 電力系統(tǒng)下垂控制及其潮流計(jì)算
1.1 電力系統(tǒng)中的下垂控制
下垂控制是電力系統(tǒng)中微型電源的一種控制方式[4],通過模擬傳統(tǒng)同步發(fā)電機(jī)的外特性曲線(即有功-頻率和無功-電壓一次下垂曲線),實(shí)現(xiàn)系統(tǒng)中各微型電源的功率平衡。
下垂控制方式運(yùn)行下的設(shè)備只需要測量有功、無功、電壓幅值、電壓相角與頻率等運(yùn)行參數(shù),按照給定的下垂控制曲線調(diào)整有功、無功輸出,在無信息交互的情況下就可讓電網(wǎng)頻率穩(wěn)定在給定數(shù)值范圍內(nèi),同時各裝置的電壓符合各自的要求,并且有功、無功出力平衡;新增下垂控制的設(shè)備也只需按照該微電網(wǎng)參數(shù)制定下垂控制曲線,即可加入該網(wǎng)絡(luò)運(yùn)行。下垂控制是一種可以實(shí)現(xiàn)“即插即用”模式的控制方式[5—6]。
以正序網(wǎng)絡(luò)中的P-ω、Q-V型下垂控制方式為例,其控制方程為:
(1)
式中:ωi為節(jié)點(diǎn)i的運(yùn)行角頻率值;Vi為節(jié)點(diǎn)i的電壓幅值;ωi0,Vi0分別為節(jié)點(diǎn)i空載運(yùn)行時的角頻率與電壓幅值;mPi,nQi分別為節(jié)點(diǎn)i的P-ω、Q-V型下垂控制系數(shù);PGi,QGi分別為節(jié)點(diǎn)i注入電網(wǎng)的有功與無功功率。
由式(1)可知,下垂控制設(shè)備注入節(jié)點(diǎn)i的有功、無功功率為:
(2)
P-ω、Q-V型下垂控制特性曲線與控制框圖分別見圖1、圖2。其中,f=ω/(2π);U0,f0分別為空載運(yùn)行時的電壓和頻率;Pin,Qin分別為輸入有功和無功功率;ωout,Uout分別為輸出角頻率和電壓。

圖1 P-ω和Q-V型下垂控制特性曲線Fig.1 P-ω and Q-V droop control characteristic curves

圖2 P-ω和Q-V型下垂控制框圖Fig.2 Block diagram of P-ω and Q-V droop control
此外,下垂控制還有P-V、Q-ω型控制方式,其特性曲線、控制方程及框圖與上述類似。為建立更貼合電力系統(tǒng)實(shí)際運(yùn)行的模型,下垂控制策略也在不斷發(fā)展。文獻(xiàn)[7]改進(jìn)了P-ω型下垂控制,使得微電網(wǎng)孤島運(yùn)行中的瞬時有功功率分配更加合理;文獻(xiàn)[8—9]考慮了設(shè)備下垂系數(shù)取值不固定,在求解過程中不斷修正下垂控制系數(shù);文獻(xiàn)[10—12]則是針對不同類型的下垂控制設(shè)備,提出了計(jì)算與確定相應(yīng)下垂系數(shù)的方法;文獻(xiàn)[13]改進(jìn)了下垂控制,使其能適應(yīng)電力系統(tǒng)功率突變場景,保證系統(tǒng)平穩(wěn)運(yùn)行;文獻(xiàn)[14]提出了在下垂控制曲線中設(shè)定合適的控制死區(qū);文獻(xiàn)[15]提出了應(yīng)用于高壓直流系統(tǒng)的改變電壓基準(zhǔn)的自適應(yīng)下垂控制;文獻(xiàn)[16]則是對引入虛擬阻抗的下垂控制進(jìn)行了研究。
1.2 下垂控制潮流與動態(tài)潮流計(jì)算
對于一個給定網(wǎng)絡(luò)結(jié)構(gòu)、參數(shù)與運(yùn)行限值的電力系統(tǒng),常規(guī)潮流計(jì)算選取該系統(tǒng)穩(wěn)態(tài)運(yùn)行的某一時刻。假定該時刻系統(tǒng)頻率為工頻、系統(tǒng)中功率已由平衡節(jié)點(diǎn)平衡、各節(jié)點(diǎn)狀態(tài)量遵循約束,則可通過常規(guī)潮流計(jì)算求解出這一時刻系統(tǒng)的詳細(xì)運(yùn)行狀態(tài)[17]。
文中所述的計(jì)及下垂控制的潮流計(jì)算則是面向含有下垂控制設(shè)備的電力系統(tǒng)的詳細(xì)運(yùn)行狀態(tài)求解。同樣選取系統(tǒng)穩(wěn)態(tài)運(yùn)行的某一時刻,該時刻系統(tǒng)功率平衡,狀態(tài)量遵循約束。不同于常規(guī)潮流,下垂控制潮流計(jì)算系統(tǒng)頻率非固定,系統(tǒng)功率由有調(diào)節(jié)能力的電源共同平衡,且電源調(diào)節(jié)時遵循各自的下垂控制曲線。
同樣涉及系統(tǒng)頻率變化的還有動態(tài)潮流計(jì)算。動態(tài)潮流計(jì)算是假定在系統(tǒng)運(yùn)行的某一時刻源-荷間仍存在不平衡功率,且不平衡功率由全體有備用容量的發(fā)電機(jī)與負(fù)荷共同調(diào)節(jié),同時狀態(tài)量滿足必要約束,經(jīng)過一個較小時間段后[18],系統(tǒng)重新達(dá)到功率平衡這一過程的求解。
考慮下垂控制的潮流與動態(tài)潮流相同之處在于引起頻率變化的不平衡功率不再由平衡節(jié)點(diǎn)單獨(dú)承擔(dān)[19];動態(tài)潮流中不平衡功率的一次調(diào)頻分配策略與文中所述的交流系統(tǒng)中的P-ω型下垂控制相似[20—21]。不同之處在于,動態(tài)潮流主要考慮電力系統(tǒng)中源-荷有功功率不平衡及頻率變化,且主要針對電網(wǎng)中的交流系統(tǒng),而在計(jì)算過程中較少涉及電網(wǎng)電壓變化[22—23];考慮下垂控制的潮流計(jì)算則是對加入下垂控制設(shè)備的系統(tǒng)在某一時刻詳細(xì)運(yùn)行狀態(tài)的求取,包括系統(tǒng)電壓和無功功率。計(jì)及下垂控制的潮流計(jì)算面向電力系統(tǒng)源網(wǎng)荷儲的各個環(huán)節(jié),如P-V型下垂控制的新能源發(fā)電系統(tǒng)[24—25]、主配一體化電網(wǎng)、交直流混合電網(wǎng)、儲能電站等。
1.3 下垂控制潮流計(jì)算的應(yīng)用場景
根據(jù)電力系統(tǒng)中不同的網(wǎng)絡(luò)規(guī)模及運(yùn)行方式,計(jì)及下垂控制的潮流計(jì)算主要應(yīng)用于以下3種場景:
(1) 含下垂控制設(shè)備的配電網(wǎng)。下垂控制設(shè)備的規(guī)模相對較小,因此直接通過公共連接點(diǎn)(point of common coupling,PCC)接入配電網(wǎng)。下垂控制設(shè)備的接入對配電網(wǎng)運(yùn)行影響較大[26—27]。
(2) 微電網(wǎng)并網(wǎng)運(yùn)行。DG所在地理位置比較集中時,可以考慮用一定的控制策略將其與部分網(wǎng)絡(luò)及負(fù)荷整合為一體,稱為微電網(wǎng)[28]。微電網(wǎng)主要有交流微電網(wǎng)與交直流混合微電網(wǎng)2種類型。對于大電網(wǎng)而言,以微電網(wǎng)的形式接入配電網(wǎng)運(yùn)行可視為只增加了一個節(jié)點(diǎn),較為容易處理。
(3) 微電網(wǎng)孤島運(yùn)行。微電網(wǎng)自成獨(dú)立系統(tǒng),脫離大電網(wǎng)運(yùn)行,此時微電網(wǎng)頻率不再固定[29—30]。對于微電網(wǎng)孤島運(yùn)行中的下垂控制設(shè)備處理方式較多,現(xiàn)有研究表明孤島運(yùn)行時的計(jì)算方法已取得較多成果,但仍須改進(jìn)。
2 下垂控制設(shè)備的模型與潮流方程
2.1 下垂控制設(shè)備及處理
電力系統(tǒng)中具有下垂控制特性的設(shè)備種類繁多,而在計(jì)及下垂控制潮流計(jì)算的現(xiàn)有研究中主要考慮風(fēng)力發(fā)電、光伏發(fā)電、微型燃?xì)廨啓C(jī)、燃料電池電站、分布式儲能裝置、電壓源型換流器(voltage source converter,VSC)等。按照運(yùn)行方式的不同,上述設(shè)備主要分為P-Q型、P-V型、P-I型、P-Q(V)型、下垂控制型5種類型[31—32]。
下垂控制型設(shè)備注入電網(wǎng)的有功、無功功率按式(2)計(jì)算,將式(2)進(jìn)行變形得到:
mPiPGi=ωi0-ωi
(3)
由于穩(wěn)態(tài)時系統(tǒng)中只有一個頻率,故對于各個節(jié)點(diǎn),式(3)必須成立,即同一系統(tǒng)內(nèi)的下垂控制型設(shè)備需要滿足如下條件:
mP1PG1=mP2PG2=…=mPiPGi
(4)
在常規(guī)潮流計(jì)算中,電力系統(tǒng)的節(jié)點(diǎn)一般按照運(yùn)行特性分為PQ節(jié)點(diǎn)、PV節(jié)點(diǎn)、平衡節(jié)點(diǎn)3種[2]。在計(jì)及下垂控制的潮流計(jì)算中,對外呈下垂控制特性的節(jié)點(diǎn)可稱為下垂節(jié)點(diǎn),下垂節(jié)點(diǎn)的有功、無功功率可按式(2)加入網(wǎng)絡(luò)方程。
2.2 考慮下垂控制的網(wǎng)絡(luò)設(shè)備潮流模型
對考慮下垂控制的交流系統(tǒng)進(jìn)行潮流計(jì)算時,所采取的數(shù)學(xué)模型與傳統(tǒng)模型的設(shè)定基本一致,線路與變壓器均采用π型等值電路。
交流系統(tǒng)中的負(fù)荷模型采用靜態(tài)負(fù)荷模型[1],引入下垂控制時須考慮頻率與電壓的變化,此時電網(wǎng)負(fù)荷模型表示為:
(5)
式中:PLi,QLi分別為節(jié)點(diǎn)i的負(fù)荷有功與無功功率;PiN,QiN分別為節(jié)點(diǎn)i的額定有功與無功功率;f,fN分別為節(jié)點(diǎn)i的實(shí)際頻率與額定頻率;Kp f,Kq f分別為頻率對有功、無功的影響系數(shù);α,β分別為電壓對有功、無功的影響系數(shù)。直流系統(tǒng)中的負(fù)荷考慮電壓變化,不考慮頻率變化影響,即直流負(fù)荷模型為式(5)除去頻率項(xiàng)的形式。
現(xiàn)有涉及下垂控制潮流計(jì)算的文獻(xiàn)中,交直流混合系統(tǒng)的VSC設(shè)備均使用脈寬調(diào)制(pulse width modulation,PWM)技術(shù),如圖3所示,未見其他調(diào)制方式,其模型表示如下:
(6)
式中:UVSC,AC,δVSC,AC分別為交流側(cè)的電壓幅值與相角;UVSC,DC,δDC分別為直流側(cè)的電壓幅值與相角;M為PWM技術(shù)中的調(diào)制比。VSC的有功、無功功率可以參考發(fā)電機(jī)的功角特性方程進(jìn)行求取。圖3中,C為電容值;UDC為直流側(cè)電壓;ZAC為交流側(cè)輸入阻抗;S1、S2為VSC。
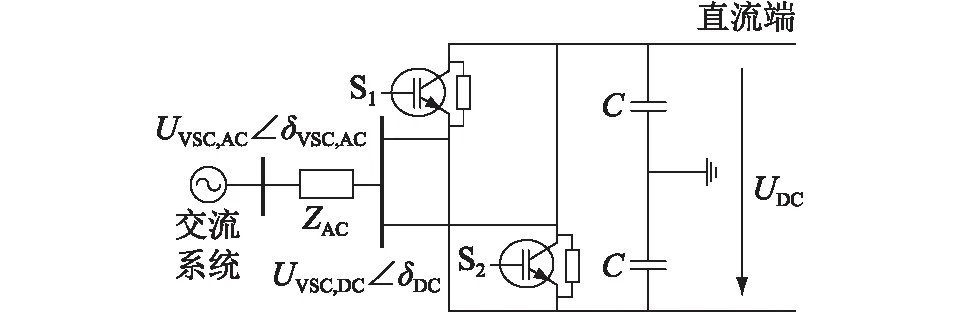
圖3 VSC等效電路Fig.3 Equivalent circuit of VSC
2.3 計(jì)及下垂控制的潮流方程
電力系統(tǒng)中節(jié)點(diǎn)功率方程一般表示為:
(7)
式中:FPi,F(xiàn)Qi分別為節(jié)點(diǎn)i注入的有功功率之和、無功功率之和;Pi,Qi分別為其余節(jié)點(diǎn)注入節(jié)點(diǎn)i的有功、無功功率。
交流系統(tǒng)的節(jié)點(diǎn)功率方程具體表示為:
(8)
式中:Pis,Qis分別為節(jié)點(diǎn)i電源有功和無功功率;Gij,Bij分別為支路ij阻抗和導(dǎo)納;ei,fi為節(jié)點(diǎn)i電壓的極坐標(biāo)值;ej,fj為節(jié)點(diǎn)j電壓的極坐標(biāo)值。
下垂控制設(shè)備對所在節(jié)點(diǎn)注入如式(2)所示的功率,則該節(jié)點(diǎn)功率方程可以表示為:
(9)
式中:PDis,QDis分別為下垂控制設(shè)備輸出的有功、無功功率。
當(dāng)系統(tǒng)為交直流混合系統(tǒng)時,交直流系統(tǒng)聯(lián)結(jié)處功率方程則變?yōu)椋?/p>
(10)
式中:PGi,AC,QGi,AC分別為交流側(cè)節(jié)點(diǎn)i注入的電源有功、無功功率;PLi,AC,QLi,AC分別為交流側(cè)節(jié)點(diǎn)i注入的負(fù)荷有功、無功功率;Pi,AC,Qi,AC分別為交流側(cè)其余節(jié)點(diǎn)注入節(jié)點(diǎn)i的負(fù)荷有功、無功功率;PVSC,QVSC分別為交直流系統(tǒng)聯(lián)結(jié)處換流器的有功、無功功率(以VSC為例)。
3 下垂控制對潮流計(jì)算的影響
當(dāng)電力系統(tǒng)考慮下垂控制后,潮流計(jì)算須考慮出現(xiàn)新變化量所產(chǎn)生的影響。直流系統(tǒng)中狀態(tài)量較少,下垂控制對其潮流計(jì)算影響相對較小;而交流系統(tǒng)計(jì)及下垂控制后,常規(guī)潮流計(jì)算中平衡節(jié)點(diǎn)的電壓與系統(tǒng)頻率由恒定變?yōu)榭勺儭5?章歸納了現(xiàn)有研究對交流系統(tǒng)中這2個變化的處理。
3.1 平衡節(jié)點(diǎn)問題
下垂控制設(shè)備并網(wǎng)運(yùn)行或微電網(wǎng)并網(wǎng)運(yùn)行時,不必考慮系統(tǒng)中的平衡節(jié)點(diǎn)問題。在計(jì)及下垂控制的潮流計(jì)算方法研究中,當(dāng)含下垂控制設(shè)備的微電網(wǎng)孤島運(yùn)行時,按照有無常規(guī)潮流計(jì)算中的平衡節(jié)點(diǎn)可分為2種方式。
(1) 取消平衡節(jié)點(diǎn)的設(shè)定。方程列寫方式與常規(guī)潮流計(jì)算方程有所不同,頻率作為變量需要在潮流計(jì)算中求解,因此雅克比矩陣中也相應(yīng)增加有功、無功關(guān)于頻率的一階偏導(dǎo)數(shù)[33]。此外,系統(tǒng)仍需一個電壓相角參考節(jié)點(diǎn)作為潮流計(jì)算結(jié)束后各節(jié)點(diǎn)相角更新的參考,一般取節(jié)點(diǎn)編號完成后的1號節(jié)點(diǎn),參考相角設(shè)為0或自定義[34—35]。
(2) 保留平衡節(jié)點(diǎn)的設(shè)定。該種方式在微電網(wǎng)孤島運(yùn)行時使用較少,并網(wǎng)運(yùn)行時使用較多。文獻(xiàn)[36]選取容量較大的DG節(jié)點(diǎn)作為潮流計(jì)算中的平衡節(jié)點(diǎn),電壓幅值與相角給定,與常規(guī)潮流計(jì)算的平衡節(jié)點(diǎn)一致;文獻(xiàn)[37]也保留了平衡節(jié)點(diǎn),但僅在潮流計(jì)算環(huán)節(jié)中設(shè)定平衡節(jié)點(diǎn)的電壓幅值與相角不變,在下垂控制更新狀態(tài)量環(huán)節(jié)中,平衡節(jié)點(diǎn)仍須修正電壓幅值,即該文中的平衡節(jié)點(diǎn)對于整個計(jì)算過程而言僅作為其他節(jié)點(diǎn)的相位參考。
3.2 系統(tǒng)頻率的更新
在電力系統(tǒng)潮流計(jì)算中,隨著下垂節(jié)點(diǎn)的引入,常規(guī)潮流計(jì)算未提及的頻率問題勢必要納入考慮范圍。下垂控制的潮流計(jì)算主要分為下垂控制設(shè)備接入配電網(wǎng)運(yùn)行、組成微電網(wǎng)后并網(wǎng)運(yùn)行、組成微電網(wǎng)后孤島運(yùn)行3種情況。現(xiàn)有研究成果顯示,僅最后一種運(yùn)行方式考慮了系統(tǒng)的頻率問題。
系統(tǒng)頻率成為變量時,計(jì)算或迭代須及時更新系統(tǒng)頻率。一個交流系統(tǒng)只有一個穩(wěn)態(tài)頻率[2],在現(xiàn)有研究中,頻率更新的主要方式有以下2種。
(1) 系統(tǒng)有平衡節(jié)點(diǎn)時,需要計(jì)算平衡節(jié)點(diǎn)的等效有功功率,根據(jù)平衡節(jié)點(diǎn)的下垂控制曲線更新系統(tǒng)頻率。由上文可知,同一系統(tǒng)內(nèi)以下垂控制特性運(yùn)行的設(shè)備須滿足式(4),令下垂節(jié)點(diǎn)總數(shù)n>2,取其中一個下垂節(jié)點(diǎn)k作為平衡節(jié)點(diǎn),則有:
(11)
每個等式兩邊各自同乘等式左邊節(jié)點(diǎn)外剩余節(jié)點(diǎn)的有功下垂控制系數(shù),并將所有等式的左右兩邊累加,整理得到PGk為:
(12)
式中:l為下垂節(jié)點(diǎn)數(shù)。算得PGk之后代入式(1),更新系統(tǒng)的頻率。
(2) 系統(tǒng)中無平衡節(jié)點(diǎn),在列寫潮流方程時,各元件模型均考慮頻率特性,將頻率作為一個變量加入方程進(jìn)行求解,現(xiàn)有研究中這種更新方式使用較多。以一個總計(jì)n個節(jié)點(diǎn)的含下垂節(jié)點(diǎn)型DG的電網(wǎng)系統(tǒng)為例:系統(tǒng)中前m個節(jié)點(diǎn)是PQ節(jié)點(diǎn),節(jié)點(diǎn)m+1到m+k是k個PV節(jié)點(diǎn),節(jié)點(diǎn)m+k+1到n是d個下垂節(jié)點(diǎn),取節(jié)點(diǎn)1作為系統(tǒng)電壓相角參考點(diǎn)(可設(shè)δ1=0),系統(tǒng)頻率參與計(jì)算。
根據(jù)式(7)、式(8)可以得出上述系統(tǒng)的節(jié)點(diǎn)功率方程組為:
(13)
式中:FP(·),F(xiàn)Q(·)分別為節(jié)點(diǎn)有功、無功功率的函數(shù);ω,Um,δn分別為對應(yīng)節(jié)點(diǎn)的角頻率、電壓和相角。式(13)的功率方程總數(shù)為n+m+d,系統(tǒng)待求量總數(shù)為n+m+d,兩者數(shù)量相等,通過牛頓-拉夫遜法(簡稱牛拉法)或其他求解方法可以求得待求量,系統(tǒng)頻率作為其中一個待求量能得到更新。
3.3 元件參數(shù)的頻率變化特性
電力系統(tǒng)潮流計(jì)算中,交流網(wǎng)絡(luò)的線路參數(shù)、變壓器參數(shù)、電力負(fù)荷均與系統(tǒng)頻率密切相關(guān)。含下垂控制設(shè)備的配電網(wǎng)或微電網(wǎng)并網(wǎng)運(yùn)行時,不需要考慮頻率變化的影響;而微電網(wǎng)孤島運(yùn)行時頻率不再恒定,此時必須考慮參數(shù)隨頻率的動態(tài)變化。
當(dāng)線路頻率變化時,其參數(shù)變化為:
(14)
式中:ωN為電網(wǎng)額定頻率;ωt-1為迭代t-1次后的頻率;xl,t,bl,t分別為第t次迭代開始時的電抗與電納值;xl,0,bl,0分別為額定頻率下的電抗與電納值。
變壓器考慮頻率變化時,其等值參數(shù)計(jì)算涉及到的短路電抗則同式(14)中的線路電抗一樣處理。
現(xiàn)有研究在進(jìn)行潮流計(jì)算時,對計(jì)及下垂控制時的元件參數(shù)隨頻率變化這一方面關(guān)注較少,大部分研究均默認(rèn)線路參數(shù)(導(dǎo)納矩陣)不變。文獻(xiàn)[33]中電力負(fù)荷模型考慮了頻率效應(yīng),但并未提及線路參數(shù)與頻率的關(guān)系;文獻(xiàn)[38]提及了線路參數(shù)隨頻率變化的關(guān)系,但后續(xù)給出的計(jì)算流程中并未體現(xiàn)出導(dǎo)納矩陣隨頻率更新的環(huán)節(jié)。雖然計(jì)及下垂控制的潮流計(jì)算得到的是最終處于穩(wěn)態(tài)時的各節(jié)點(diǎn)狀態(tài),可以一定程度上忽略頻率對元件參數(shù)的影響,但應(yīng)當(dāng)考慮潮流計(jì)算過程中因頻率變化所致的參數(shù)變化對單次迭代計(jì)算結(jié)果、計(jì)算速度及收斂性能造成的影響。
4 下垂控制的潮流方程求解方法
計(jì)及下垂控制的潮流計(jì)算方法是在常規(guī)潮流計(jì)算方法中考慮了下垂控制關(guān)系。含下垂控制設(shè)備的交流系統(tǒng)節(jié)點(diǎn)功率表達(dá)式中含有系統(tǒng)頻率與節(jié)點(diǎn)電壓,考慮到潮流計(jì)算是對某一時刻潮流分布的求解,一般默認(rèn)這類節(jié)點(diǎn)的功率與電壓在單次迭代中不發(fā)生變化,因此可在單次迭代過程中令有功功率與無功功率(或有功功率與電壓幅值、電壓幅值與相角)恒定。在求解過程中這類節(jié)點(diǎn)可被視為常規(guī)潮流計(jì)算中的PQ節(jié)點(diǎn)(或PV節(jié)點(diǎn)、平衡節(jié)點(diǎn)),從而列寫潮流方程進(jìn)行求解。
如文中1.3節(jié)所述,計(jì)及下垂控制的潮流計(jì)算場景中微電網(wǎng)主要有并網(wǎng)運(yùn)行、孤島運(yùn)行2種模式,因此現(xiàn)有研究多以某一種運(yùn)行模式與某一系統(tǒng)類型為出發(fā)點(diǎn),研究的計(jì)算方法有:以直接法、前推回代法、序分量求解法等為代表的計(jì)及配電網(wǎng)特性的計(jì)算方法;面向單一網(wǎng)絡(luò)類型的經(jīng)典牛拉法;以信賴域算法為代表的新型求解方法。上述求解方法所面向的對象存在一定程度的交叉與重合,故文中從數(shù)學(xué)方法角度將計(jì)及下垂控制的潮流計(jì)算方法分為統(tǒng)一迭代求解法、分步式求解法及數(shù)學(xué)規(guī)劃求解法3類,如圖4所示。
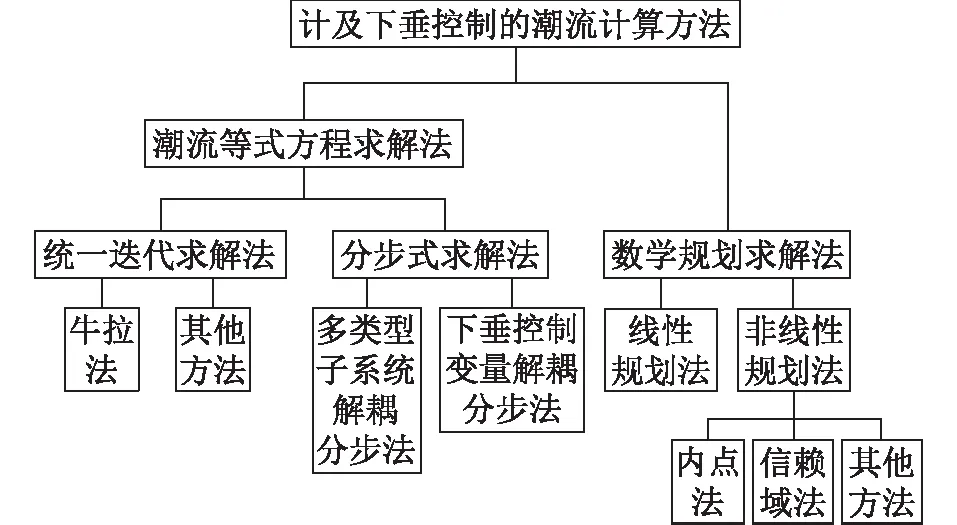
圖4 下垂控制潮流計(jì)算方法Fig.4 Calculation methods for droop control power flow
4.1 統(tǒng)一迭代求解法
統(tǒng)一迭代求解法是將整個系統(tǒng)的狀態(tài)量(包含系統(tǒng)頻率)作為變量,建立統(tǒng)一的潮流方程,進(jìn)行迭代求解。統(tǒng)一迭代求解法主要用于系統(tǒng)類型較少的大電網(wǎng)場景,最常見方法為牛拉法,其主要原理是將非線性方程逐次線性化逼近求解[39],求解式(15)的線性方程。
F(X(t))=-J(t)ΔX(t)
(15)
式中:F(X(t))為潮流函數(shù);J(t)為求解系數(shù);ΔX(t)為狀態(tài)變化量。若式(15)滿足式(16)中任一條件即可判定為潮流收斂,完成潮流的求解。
(16)
計(jì)及下垂控制的潮流求解時,系統(tǒng)頻率作為待求量在方程組中求解,計(jì)算時下垂節(jié)點(diǎn)可按先前所述,視為PQ節(jié)點(diǎn)、PV節(jié)點(diǎn)或平衡節(jié)點(diǎn)中的一種或幾種,則牛拉法的潮流方程矩陣形式為:
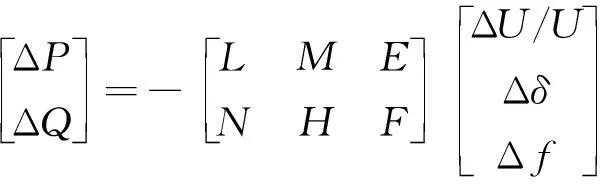
(17)
式中:ΔP,ΔQ分別為每次迭代過程中有功、無功變化量;ΔU,Δδ,Δf分別為迭代過程中電壓、相角和頻率變化量。矩陣方程中的雅克比矩陣元素L,M,N,H含義與常規(guī)潮流計(jì)算相同,新增元素E與F分別為:
(18)
式中:ΔPi,ΔQi分別為每次迭代過程中節(jié)點(diǎn)i的有功、無功變化量。系統(tǒng)有下垂節(jié)點(diǎn)時須相應(yīng)增加功率修正方程,頻率須在方程組中求解,所以狀態(tài)變化量中多出Δf這一待求量。
在現(xiàn)有含下垂控制的潮流計(jì)算方法的研究中,文獻(xiàn)[40]將牛拉法用于計(jì)算孤島運(yùn)行時的交直流混合微電網(wǎng);但也有部分研究對牛拉法進(jìn)行改進(jìn),使之更適合含下垂節(jié)點(diǎn)的潮流計(jì)算,如文獻(xiàn)[33]在常規(guī)潮流計(jì)算節(jié)點(diǎn)的設(shè)定上去除了平衡節(jié)點(diǎn),由具備調(diào)節(jié)能力的下垂控制電源共同承擔(dān)不平衡功率,但在微電網(wǎng)孤島運(yùn)行中該方法可能存在雅克比矩陣奇異導(dǎo)致潮流不收斂的情況。文獻(xiàn)[41]在牛拉法的基礎(chǔ)上考慮潮流中的遞階控制,并對雅克比矩陣進(jìn)行重新推導(dǎo),提高了牛拉法的收斂性,但該方法單次計(jì)算量大、單次計(jì)算時間長。為應(yīng)對牛拉法易出現(xiàn)的雅克比矩陣奇異問題,文獻(xiàn)[42]提出了引入加權(quán)系數(shù)的牛拉法,單次計(jì)算時間略長于經(jīng)典牛拉法,但迭代次數(shù)減少,整體收斂時間優(yōu)于經(jīng)典牛拉法;文獻(xiàn)[43]則引入最小二乘求解的輔助因子,提升了計(jì)算效率與初值魯棒性,減少了迭代次數(shù)。文獻(xiàn)[44]提出了一種三相解耦的序分量求解方法,減少了雅克比矩陣的計(jì)算量,提高了求解速度。進(jìn)行三相解耦的求解方法可以適應(yīng)三相不平衡的配電網(wǎng),但其求解對象為穩(wěn)態(tài)潮流且未考慮微電網(wǎng)孤島運(yùn)行時節(jié)點(diǎn)狀態(tài)量與元件參數(shù)變化,有進(jìn)一步研究的空間。文獻(xiàn)[45]以帶新型線性搜索三步LM算法(three-steps Levenberg Marquardt algorithm with a new line search,NTLM)為基礎(chǔ)建立統(tǒng)一潮流模型以解決雅克比矩陣可能發(fā)生奇異的問題。
統(tǒng)一迭代求解法作為系統(tǒng)整體迭代求解的方法,考慮了不同系統(tǒng)或狀態(tài)量間的耦合關(guān)系,使得建立的統(tǒng)一模型更加精確,故單次迭代求得的解相比其他方法更靠近真實(shí)解。隨著電力系統(tǒng)的發(fā)展,不同類型系統(tǒng)之間的耦合關(guān)系也更加復(fù)雜,建立統(tǒng)一模型的難度將不斷增加,且單次迭代計(jì)算量較大。當(dāng)系統(tǒng)規(guī)模擴(kuò)大時,其計(jì)算量的迅速擴(kuò)大將成為難題。對于復(fù)雜的下垂控制潮流,統(tǒng)一迭代求解法更適合為新的求解方法提供收斂速度與計(jì)算效率的參照。
4.2 分步式求解法
統(tǒng)一求解法對于含不同類型子系統(tǒng)的混合電力系統(tǒng)的建模難度較大,現(xiàn)有研究中提出一種將電力系統(tǒng)中的子系統(tǒng)解耦,以交替迭代方式進(jìn)行求解的分步式求解法。該方法優(yōu)勢在于子系統(tǒng)解耦后單獨(dú)建模難度顯著降低,主要用于處理交直流電網(wǎng)耦合環(huán)節(jié)VSC以及交直流混合電網(wǎng)中含下垂控制設(shè)備的直流電網(wǎng)的場景。
文獻(xiàn)[46]將直流系統(tǒng)的下垂控制以節(jié)點(diǎn)電流關(guān)系求解,從VSC處進(jìn)行交直流系統(tǒng)解耦,與交流系統(tǒng)的牛拉法進(jìn)行分步迭代;文獻(xiàn)[47]則更充分地考慮了VSC模型與控制方式,解耦后分步交替迭代進(jìn)行求解;文獻(xiàn)[48]處理直流系統(tǒng)的下垂控制并進(jìn)行交直流系統(tǒng)解耦后,交流系統(tǒng)使用改進(jìn)XB型快速求解法,提升了整體的求解速度;文獻(xiàn)[49]不僅對交直流系統(tǒng)解耦進(jìn)行了分步求解,還對交流系統(tǒng)中的電壓穩(wěn)定與無功平衡進(jìn)行了分步處理求解,更好地控制了混合電網(wǎng)的電壓。
此外,還存在一種借鑒奔德斯分解思想的[50]、將處于下垂控制關(guān)系的變量進(jìn)行解耦后交替迭代的分步式求解法。該方法主要面向考慮下垂控制的單一類型系統(tǒng),根據(jù)計(jì)算過程中系統(tǒng)是否設(shè)置實(shí)際平衡節(jié)點(diǎn),將其分為2類。
(1) 含實(shí)際平衡節(jié)點(diǎn)的分步式求解法。將單次迭代過程分解為2個步驟,即:步驟一,常規(guī)迭代計(jì)算;步驟二,系統(tǒng)頻率更新與基于下垂控制方程的設(shè)備功率計(jì)算。為減少雅克比矩陣階數(shù)以提升計(jì)算速度,在步驟一中可以選擇一個下垂節(jié)點(diǎn)作為平衡節(jié)點(diǎn),其余下垂節(jié)點(diǎn)均視為PV節(jié)點(diǎn)[37]。PV節(jié)點(diǎn)的有功功率與電壓幅值、平衡節(jié)點(diǎn)的電壓幅值與相角為上次迭代中步驟二的更新值;步驟二根據(jù)下垂控制曲線用步驟一求得的功率更新系統(tǒng)頻率與節(jié)點(diǎn)電壓。此外,第一次迭代時狀態(tài)量為給定的系統(tǒng)初值。步驟二系統(tǒng)頻率更新時使用的平衡節(jié)點(diǎn)有功功率按式(12)求得,求得系統(tǒng)頻率后按式(2)更新PV節(jié)點(diǎn)的有功功率;步驟一中求得的無功功率根據(jù)式(2)更新PV節(jié)點(diǎn)的電壓幅值,2個子問題交替迭代進(jìn)行求解。
文獻(xiàn)[37]使用了含平衡節(jié)點(diǎn)的解耦分步方法求解算例,如圖5所示。潮流收斂所需迭代次數(shù)較少,在其第二步下垂控制更新中存在一個問題未交待清楚:含平衡節(jié)點(diǎn)的潮流計(jì)算可以直接求得平衡節(jié)點(diǎn)的功率,而文中卻以推導(dǎo)得出的式(12)作為平衡節(jié)點(diǎn)的有功功率,并未說明2種方式所求有功功率的差異或直接求得的平衡節(jié)點(diǎn)有功功率不能用來更新頻率的原因。
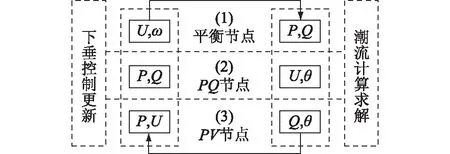
圖5 含平衡節(jié)點(diǎn)的兩步式求解Fig.5 Two-step solution with balance node
(2) 虛擬平衡節(jié)點(diǎn)的分步式求解法。該方法在系統(tǒng)中設(shè)置虛擬平衡節(jié)點(diǎn),設(shè)置點(diǎn)一般為微電網(wǎng)并網(wǎng)點(diǎn)或微電網(wǎng)某一節(jié)點(diǎn)附近。求解時首先將虛擬平衡節(jié)點(diǎn)視為微電網(wǎng)的平衡節(jié)點(diǎn),進(jìn)行常規(guī)潮流計(jì)算,求得虛擬平衡節(jié)點(diǎn)功率;然后,由全體有調(diào)節(jié)能力的DG平衡該功率,按各自的下垂控制曲線進(jìn)行功率分配;最后,完成系統(tǒng)頻率與各節(jié)點(diǎn)電壓幅值的更新,進(jìn)行交替迭代,完成潮流的求解。該方法被用于計(jì)及下垂控制的配電網(wǎng)潮流計(jì)算中,如文獻(xiàn)[51]在進(jìn)行變量解耦后,以前推回代法進(jìn)行計(jì)及下垂控制的配電網(wǎng)潮流計(jì)算;文獻(xiàn)[35]則是分步后以直接法計(jì)算含下垂控制的配電網(wǎng)三相不平衡潮流。
如上所述,現(xiàn)有研究中的分步式求解法基本可分為子系統(tǒng)解耦與節(jié)點(diǎn)狀態(tài)變量解耦2個維度。研究表明交直流系統(tǒng)解耦后的交替迭代求解法相比統(tǒng)一迭代求解法能更好建立模型與方程,更適合求解多類型子系統(tǒng)混合電網(wǎng)。將下垂控制變量進(jìn)行解耦,降低了求解過程的復(fù)雜程度,在進(jìn)行常規(guī)迭代計(jì)算時可借鑒現(xiàn)有的計(jì)算方法,僅須增加下垂控制功率分配與頻率電壓更新環(huán)節(jié),減小了編程實(shí)現(xiàn)的難度。常規(guī)迭代計(jì)算部分可使用常規(guī)潮流計(jì)算方法,若用快速求解法可縮短潮流整體收斂時間。
4.3 數(shù)學(xué)規(guī)劃求解法
數(shù)學(xué)規(guī)劃求解法為在給定限制區(qū)域中尋求給定目標(biāo)函數(shù)的最小或最大值的一種數(shù)學(xué)方法,一般可分為線性規(guī)劃法和非線性規(guī)劃法2種。
數(shù)學(xué)規(guī)劃求解法穩(wěn)定性高,主要用于無平衡節(jié)點(diǎn)或初值較差等原因?qū)е碌仁椒匠糖蠼忸惙椒ú灰浊蠼獾某绷饔?jì)算場景。計(jì)及下垂控制的潮流方程一般為非線性方程,可將潮流方程轉(zhuǎn)化為目標(biāo)函數(shù),即將非線性方程求解問題轉(zhuǎn)化為非線性規(guī)劃極值的求解問題,此時可將非線性規(guī)劃法的求解方式應(yīng)用到下垂控制潮流計(jì)算中。現(xiàn)有研究中相關(guān)問題所使用的非線性規(guī)劃求解法有內(nèi)點(diǎn)法[52—53]、信賴域法[34,54]等。
潮流計(jì)算由非線性方程組求解問題轉(zhuǎn)變成非線性規(guī)劃問題,可表示為minF(X)。常規(guī)潮流求解時的潮流函數(shù)F(X)可由式(6)與式(9)的功率方程進(jìn)行構(gòu)造,而計(jì)及下垂控制的潮流計(jì)算新增了下垂節(jié)點(diǎn),可將下垂節(jié)點(diǎn)按式(2)加入方程,參考式(12)進(jìn)行構(gòu)造,最終方程可表示為:

(19)
式中:X為狀態(tài)變量矩陣,X=[x1x2…xn];i為PQ節(jié)點(diǎn)、PV節(jié)點(diǎn)的編號;d為下垂節(jié)點(diǎn)的編號。
非線性規(guī)劃法的特點(diǎn)為潮流求解過程不易發(fā)散,對初值敏感程度較低,在潮流方程為病態(tài)的情況下也易求得解,潮流無解時也會收斂至某個值或在可行域內(nèi)不斷尋解。該方法所呈現(xiàn)的求解結(jié)果可以為潮流有無解提供判斷依據(jù)[39]。
文獻(xiàn)[34]中的BFGS信賴域法就是一種無約束非線性規(guī)劃求解方法,其收斂性能優(yōu)異且對初值不敏感,避免了牛拉法初值不當(dāng)無法求解的問題。但該方法須重新計(jì)算每次的海森矩陣,即使文中構(gòu)造了海森矩陣的近似矩陣,計(jì)算量仍大于牛拉法的雅克比矩陣,且收斂判據(jù)精度高時迭代次數(shù)較多,因此求解效率低于牛拉法。文獻(xiàn)[54]對信賴域算法進(jìn)行了以雅克比矩陣代替海森矩陣構(gòu)造信賴域子問題的改進(jìn),較文獻(xiàn)[34]提高了收斂速度且保持了方法本身的其他優(yōu)點(diǎn)。
數(shù)學(xué)規(guī)劃求解法是在給定約束條件內(nèi)找到極值或最優(yōu)解,相對非線性潮流等式方程更易求得解,但該類方法計(jì)算效率較低,在尋解方式選擇不當(dāng)時更為突出,有進(jìn)一步研究的空間。
5 未來研究展望
現(xiàn)有研究所提出的計(jì)及下垂控制的潮流計(jì)算方法各有優(yōu)缺點(diǎn),其精確建模與準(zhǔn)確計(jì)算的方法正在日趨完善,可以進(jìn)一步研究與考慮以下內(nèi)容:
(1) 對于統(tǒng)一迭代求解法,可進(jìn)一步研究迭代算法的優(yōu)化處理,降低其對初值敏感度并縮短單次迭代計(jì)算時間。此外可研究PQ分解法、改進(jìn)牛拉法等快速求解方法對于計(jì)及下垂控制的潮流計(jì)算的適應(yīng)性;研究相應(yīng)計(jì)算方法的具體改進(jìn)措施,使之能在計(jì)及下垂控制的潮流計(jì)算中應(yīng)用。
(2) 當(dāng)下垂控制設(shè)備接入交流系統(tǒng),認(rèn)為系統(tǒng)頻率可變時,對于某一種潮流計(jì)算方法,若計(jì)算時考慮元件參數(shù)頻率變化特性,則每次迭代過程中導(dǎo)納矩陣均隨頻率變化,其性能會受到一定影響。因此,須進(jìn)一步研究這一情形對求解方法性能及導(dǎo)納矩陣變化所得的計(jì)算結(jié)果的影響程度。
(3) 電動汽車、儲能與新能源發(fā)電等設(shè)備大量并網(wǎng)。由于這些設(shè)備數(shù)量眾多且分散地域廣,不易統(tǒng)一控制,下垂控制成為這類新型設(shè)備參與電網(wǎng)互動的首選控制方式,因此未來計(jì)及下垂控制的潮流計(jì)算也需要將這些新型設(shè)備納入計(jì)算當(dāng)中。
(4) 虛擬同步發(fā)電機(jī)、虛擬電廠等技術(shù)的發(fā)展進(jìn)一步拓展了下垂控制的應(yīng)用場景,后續(xù)也需要針對性地開展相關(guān)研究。
6 結(jié)論
隨著下垂控制設(shè)備的大規(guī)模并網(wǎng)、電網(wǎng)中的變化因素逐漸增多,一定程度上為電力系統(tǒng)運(yùn)行與分析帶來新考驗(yàn),而計(jì)及下垂控制的潮流計(jì)算將是電網(wǎng)運(yùn)行與狀態(tài)分析的有效手段。文中從下垂控制模型、網(wǎng)絡(luò)方程構(gòu)建、元件參數(shù)的頻率變化、計(jì)算方法4個方面對現(xiàn)有研究進(jìn)行綜述,可得出以下結(jié)論:
(1) 目前計(jì)及下垂控制的潮流計(jì)算的應(yīng)用場景主要為孤島運(yùn)行模式的微電網(wǎng)。微電網(wǎng)中不同運(yùn)行特性的下垂控制設(shè)備參與潮流計(jì)算需要不同的處理,但目前尚未有統(tǒng)一的下垂控制設(shè)備潮流模型構(gòu)建方法。
(2) 對于單類型電網(wǎng)系統(tǒng),可以使用變量解耦的方式將頻率從控制關(guān)系中取出,單獨(dú)進(jìn)行求解更新,或?qū)㈩l率等下垂控制變量放進(jìn)潮流目標(biāo)方程以數(shù)學(xué)規(guī)劃求解法進(jìn)行求解。對于主配一體化、交直流等多類型混合電網(wǎng)可以使用統(tǒng)一迭代法、分步式求解法與數(shù)學(xué)規(guī)劃求解法。
(3) 統(tǒng)一迭代求解法建模精度高,其中牛拉法應(yīng)用較多、收斂速度快,但對初值要求較高且存在雅克比矩陣奇異問題。因此,需要進(jìn)一步研究牛拉法的優(yōu)化方法及其他適合統(tǒng)一迭代求解的計(jì)算方法。
(4) 分步式求解法對于混合系統(tǒng)而言建模難度低,解耦處理合適時潮流收斂效率高于統(tǒng)一迭代求解法,但存在交替迭代誤差、迭代次數(shù)較多的問題,有進(jìn)一步研究空間。
(5) 數(shù)學(xué)規(guī)劃求解法目前在下垂控制潮流的應(yīng)用較少,相對于非線性潮流等式方程求解類方法,對初值相對不敏感,更易求得有效解,但存在迭代次數(shù)多與計(jì)算量較大的問題,可進(jìn)一步研究尋解與優(yōu)化方式。
隨著國家碳達(dá)峰與碳中和工作的穩(wěn)步推進(jìn),新能源發(fā)電與電動汽車等新型設(shè)備在電網(wǎng)中的滲透率不斷提高,下垂控制及其潮流計(jì)算方法將得到進(jìn)一步完善與發(fā)展,未來有望在實(shí)際工程中得到廣泛應(yīng)用,為電力系統(tǒng)安全可靠運(yùn)行提供有力支撐。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00