立體化智能電力系統巡檢平臺關鍵技術研究
2022-06-04 14:19:53于培勇張慧琳郭志剛鄭文雷李俊州
粘接 2022年5期
于培勇 張慧琳 郭志剛 鄭文雷 李俊州




摘 要:電能作為能量來源的重要組成部分,直接關系到社會經濟的發展,保證電能供應的穩定性至關重要。因此需要對電力系統進行常規巡檢,以保證電力系統工作在最優的狀態,持續不斷提供優質電能。立體化智能電力巡檢平臺能夠實現對巡檢區域的多角度、全方位覆蓋,對電力系統的工作狀態進行系統巡檢,該平臺運用了智能機器人技術、視頻采集技術、光譜分析技術、大數據技術等多項先進技術,能夠實現對電力系統的智能化、立體化巡檢,完全取代了傳統的人工巡檢方式,大大提高了電力巡檢的作業效率。該立體化智能電力巡檢平臺的應用對于國家大力推進的智能電網建設,具有促進作用。
關鍵詞:智能;電力系統;巡檢
中圖分類號:TM73 文獻標識碼:A 文章編號:1001-5922(2022)05-0122-04
Research on key technologies of three-dimensional intelligent power system inspection platform
Abstract: As an important part of the energy source, electric energy is directly related to the development of the society and economy, and it is crucial to ensure the stability of electric energy supply. Therefore, it is necessary to carry out routine inspection of the electric power system to ensure that the electric power system works in the optimal state and continuously provides high-quality electric energy. The three-dimensional intelligent power inspection platform can realize multi-angle and all-round coverage of the inspection area and carry out systematic inspection of the working status of the power system. The platform uses intelligent robot technology, video acquisition technology, spectral analysis technology, big data technology and other advanced technologies to realize intelligent, three-dimensional inspection of the power system, which completely replaces the traditional manual inspection mode and greatly improves the operational efficiency of power inspection. The application of this three-dimensional intelligent power inspection platform has a promotional role for the smart grid construction which is vigorously promoted by the country.
Key words: smart;power systems;inspection
隨著社會經濟的不斷發展,電力系統正朝著高電壓、大容量、高智能的方向發展,傳統的人工電力巡檢方式已經無法適應電力系統的發展要求[1-2]。新型的電力系統智能巡檢平臺集成了機器人技術、視頻采集技術、光譜分析技術、大數據技術等多項先進的技術,能夠對整個電力系統進行全方位、多角度、多功能的智能電力巡檢,最大限度保證電力系統的安全、穩定、可靠運行,提高電力巡檢的工作效率[3-4]。立體化智能電力系統巡檢平臺為電力系統持續不斷向工業生產和日常生活供電提供技術保障[5]。
1 巡檢平臺功能需求分析
隨著電力系統復雜程度的不斷提升,與其相對應的電力巡檢技術也需要實現更強大、更多樣的功能[6],具體分析該平臺的功能需求主要包括:
(1)“五遙”功能性:需要對輸配電線路、電力電子設備等進行遙視、遙控、遙調、遙測、遙信,即五遙功能;
(2)主動監控性:智能巡檢平臺能夠實現從傳統的被動監視向主動防御監控轉變,以保證巡檢平臺具備主動檢測跟蹤目標、智能管理、主動干預等功能,可以通過智能控制進行遠程視頻監控、視頻數據存儲、檢索、回放,遠程聯動警告等多種功能[7];
(3)光譜分析功能:該平臺集成了光譜檢測單元,具備了提取光譜特征和空間圖像信息的能力,能夠對輸配電線路、電力電子設備的溫度狀況進行實時監控分析,一旦溫度出現異常變化會進行預警;
(4)功能整合性:為了提高巡檢平臺的推廣性,保證該巡檢平臺能夠適用于不同的電力系統,與電力系統中的其他輔助性平臺進行高效的功能整合;
(5)功能擴展性:巡檢平臺必須采用模塊化設計,各個功能模塊需要以實際需求進行配置,硬件接口也要提前進行預留;軟件部分同樣需要預留集成接口,便于進行功能添加。
2 巡檢平臺架構
該巡檢平臺將多種智能化設備進行了集成,能夠實現遠程視頻巡檢、機器人遠程作業、光譜檢測分析、火情遠程監測等[8-9]。在電力系統的巡檢區域內的高、中、低多個位置合理布置視頻圖像采集裝置,實現對巡檢區域的全范圍、無死角覆蓋,視頻圖像數據以及平臺中其他數據采集裝置采集到的數據回傳到主控單元進行數據分析,完成視頻巡檢、光譜檢測分析、火情遠程監測等功能,部分可由電力巡檢機器人完成的作業任務,可以遠程操作電力巡檢機器人來執行[10]。
3 巡檢平臺關鍵技術
該立體化智能巡檢平臺采用了多種先進的智能化技術,具體來說包括了:智能機器人技術、視頻成像技術、光譜分析技術、云計算技術[11]。
3.1 智能機器人技術
巡檢平臺所集成的智能機器人搭載有高清紅外視頻攝像頭,該機器人能夠按照預先設定好的巡檢路線執行電力巡檢作業,通過高清紅外視頻攝像頭智能機器人[12-13],其結構主要包括了主控單元、位置傳感器、脈沖編碼器、高清紅外視頻攝像頭、步進電機、數據傳輸單元等,其硬件組成如圖1所示。
智能機器人通過數據傳輸與主控單元進行信息交互,主控單元能夠實時顯示智能機器人的工作狀態,以及智能機器人實時采集的動態數據[14]。位置傳感器采集機器人實時位置信息,用于實時定位;步進電機從主控單元接收控制命令,驅動智能機器人運行,進行多個區域的電力巡檢作業;機器人上搭載有高清紅外視頻攝像頭,實時采集巡檢區域內的輸配電線路以及電力設備的信息,并將視頻數據信息傳輸到主控單元進行后期處理,以判定被巡檢的輸配電線路是否正常,巡檢區域內是否存在異物、無關人員等,巡檢區域內作業人員是否按規定進行作業[15]。同時智能機器人也能夠從主控單元接收控制命令,完成特定的電力作業任務。智能機器人的圖片如圖2所示。
智能機器人的控制軟件結構根據具體的控制功能進行劃分,具體的功能包括:視頻數據采集、位置數據采集、運動控制、數據傳輸。運動控制模塊負責對機器人的運動進行控制,主要包括前進、后退、停止、加速、減速、越障等;視頻數據采集模塊負責采集巡檢區域內部的輸配電線路圖像信息、電力電子設備圖像信息、巡檢區域內人員信息、異物信息等;位置數據采集模塊負責采集智能機器人的實時位置信息,便于主控單元了解智能機器人的實時位置,調配其到故障位置,進行故障處理作業。
3.2 視頻成像技術
電力系統中,普遍采用的是本地及無人值守電力巡檢系統,該系統由于受制于巡檢區域的照明光線、檢測距離、檢測速度、成像清晰度等因素,存在一定的視覺盲區,無法對電力系統進行全方位、無死角的全面實時監控。
該立體化智能電力系統巡檢平臺在視頻成像技術上采用普遍應用在軍事武器上的像方掃描和積分穩像技術,該項技術能夠確保在極短的時間內完成全監控區域內的廣角度視頻數據采集,并且成像效果不會受到攝像頭旋轉速度的制約。徹底解決了在進行視頻圖像掃描過程中原有的監控死角以及圖像拖尾模糊現象,保證了視頻數據能夠完全還原監控現場的實時場景。
軟件上算法功能很強大,能夠自主識別外界電磁干擾,并且能識別外部環境(例如:日光、降雨、降雪、強風等),通過主控單元對視頻成像數據進行運算分析,識別巡檢環境中是否存在不應當屬于該巡檢區域的異物,并通知智能機器人抵達異物所在位置,由智能機器人將異物清除掉;同時能夠對闖入到巡檢環境中的人員進行跟蹤鎖定,記錄其運動軌跡及行為,辨識是否為電力巡檢作業人員,如果是則監控其行為是否滿足安全作業準則的具體要求,杜絕違章作業現象的發生,如果不是則立即發出警報將其驅離出電力巡檢區域。
3.3 光譜分析技術
光譜分析技術的核心在于光譜特征的提取,在基于光譜特征的具體信息進行后期的圖像處理,得到物體的光譜圖,在通過光譜圖對被測電力電子設備的運行狀態及溫度情況進行分析,從細微的變化預判出可能出現的結果,從而做出預警。光譜檢測技術的基本工作原理就是將光信號合理的分解成為多個窄波段的光信號,其中的每一個窄波段的光信號需要進行單獨處理,映射到與其對應的光信號檢測器上,再將檢測的結果進行組合,得到基于不同光譜波段的圖像集成。在進行分解的時候,要求窄波段盡可能窄,以保證最大限度將光信號細化處理,得到更為細致的光譜波段圖像,以便能夠更有效的對光信號的特征進行深度提取。
具備光譜信號采集功能的高清紅外攝像頭通常會布置在電力系統中的高、中、低位置,形成高低錯落的布置結構,增加視野的廣角。主控單元在進行光譜數據分析的時候,會自主調用對應的算法,進行綜合判定,分析算法會自主關聯到檢測區域,結合檢測區域的實際情況展開分析。能夠將當前數據與歷史數據進行對比,從而判斷電力電子設備是否處于不正常的運行狀態,不正常的具體位置等。
電力電子設備的火災通常都是源自基于電力電子設備的溫度過高,電力電子設備溫度的變化是一個逐漸變化的過程。一般的火情檢測技術都是在火情發生后才會做出反應進行報警,無法對火情進行預判,采用了光譜分析技術后,由于能對巡檢區域各個位置的溫升數據進行實時分析,得到精確地設備表層的熱力場分布,以及由熱傳導引發的設備外表面細微變化,可以在火情發生之前就對其進行準確的預警,從而為分析判斷電氣火情發生提供數據支撐。
3.4 云計算技術
云計算技術安全可靠,擴展靈活,數據處理能力很強,能夠充分利用數據處理設備。在巡檢平臺中,主要由主控單元完成數據運算,視頻成像設備、光譜數據采集設備、智能機器人等,也會承擔一部分數據處理任務,這樣就將數據處理任務合理的分散了開來,能夠保證硬件資源的充分利用,數據運算的效率也大幅度提高,也減少了不必要的數據通信,使得整個巡檢平臺的工作效率得到了顯著的提高。
例如,通過主控單元向智能機器人下達控制命令后,智能機器人就能夠自主進行工作,根據障礙跨越模型完成運算,實現跨越障礙任務,自己運算跨越障礙物時需要執行的動作,以及執行的順序。其運動學方程如式(1)所示:
式(1)中:θ1、θ4、d3、d2分別為兩個旋轉變量和兩個伸縮關節變量。對式(1)求導數則可以得到智能機器人的雅可比矩陣方程如式(2)所示:
式(2)中:,分別為找線機械夾持爪末端速度和智能機器人伸縮關節機構速度。
4 平臺運用實例
平臺中的視頻采集設備,例如固定式高清紅外攝像頭、智能機器人搭載的高清紅外攝像頭,合理布置在電力系統的巡檢區域內,既有布置在較高位置處的,也有布置在較低位置處,全部的攝像頭都能夠自由旋轉,能夠進行全方位視頻覆蓋,實現對電力系統的立體式巡檢,如圖3所示。
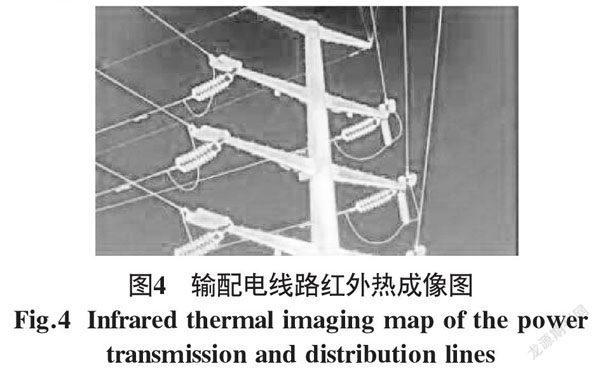
平臺基于高清紅外攝像頭對電力電子設備的溫度進行采集,通過熱成像技術對數據進行處理,得到最后的紅外熱成像圖,如圖4所示為輸配電線路紅外熱成像圖。
從熱成像圖中可以清晰地觀察到輸配電線路不同位置的溫度分布情況,將此設備的紅外熱成像圖與標準的紅外熱成像圖進行對比研究就能夠對輸配電線路進行運行狀態分析、判定輸配電線路是否處于正常運行狀態,如果輸配電線路處于故障狀態,則會直接給出故障存在的位置以及故障類型。
5 結語
本文所介紹的立體化智能電力巡檢平臺采用了多項先進的智能技術,智能機器人技術、視頻成像技術、光譜分析技術、云計算技術等。能夠對電力系統的巡檢區域進行立體化、多角度、全方位的巡檢,將多種先進的智能設備有機的融合在一起,構成一個功能強大的整體。實現電力巡檢效率的提高,保證電力系統安全、穩定、可靠運行。
【參考文獻】
[1]錢金菊,吳功平,彭向陽.架空輸電線路巡檢機器人風載下姿態檢測及作業控制技術[J].廣東電力,2017,30(1):116-120.
[2]錢平,徐街明,張永,等.變電站巡檢機器人監控系統實現技術與應用功能設計[J].電力信息與通信技術,2017,15(12):19-24.
[3]徐長福,周廣洋,胡成博,等.紫外成像圖譜參數量化提取改進算法的研究[J].智慧電力,2017,45(11):52-56.
[4]劉勇,陳海濱,劉方,等.基建現場巡檢無人機智能感知系統的研究與應用[J].電力系統保護與控制,2018,46(15):155-161.
[5]吳煒,李勃,錢瑛,等.基于人眼視覺特性的變電站圖像清晰化方法[J].電力信息與通信技術,2017,15(1):11-17.
[6]鄭欣,楊迎春,宋飛宇,等.高壓輸電設施巡檢多旋翼無人機掛載相機的選用方法[J].電力科學與工程,2016,32(6):73-78.
[7]王萬國,張晶晶,韓軍,等.基于無人機圖像的輸電線斷股與異物缺陷檢測方法[J].計算機應用,2015,35(8):2 404-2 408.
[8]唐思華,宋燕伶,陳軍.無線在線監測系統在配電自動化通信網絡中的應用[J].電子技術與軟件工程,2016,(13):39-40.
[9]蘇浩溢,賀偉明,吳小勇,等.配電自動化系統建設過程中的關鍵問題及系統運行健康度模型[J].智能電網,2014,37(10):13-18.
[10]趙永強.三維虛擬現實技術在輸電線路運檢中的應用[J].電子技術與軟件工程,2018,15(02):14-17.
[11]] 肖峰,高正平,朱海峰,等.虛擬現實技術在輸電線路大跨越高塔組立模擬系統中的應用[J].電網與清潔能源,2018,13(2):116-120.
[12]李春燕,王東,張鵬,等.計及負荷聚合商調度優先權的獨立微網雙層實時調度模型[J].電力系統自動化,2017,41(16):37-43.
[13]騰云,陳雙,鄧潔清,等.智能巡檢機器人系統在蘇通GIL綜合管廊工程中的應用[J]. 高電壓技術,2019,11(16):17-23.
[14]馮正偉,孟憲華,黃浩林,等.變電站智能巡檢機器人應用提升研究[J].浙江電力,2019,13(6):11-14.
[15]陳能成,李丹丹,肖長江,等.基于物聯網GIS的消防智能巡檢系統設計與實現[J].地理信息世界,2016,19(13):31-35.
收稿日期:2021-01-14;修回日期:2022-03-30
作者簡介:于培勇(1977-),男,碩士,高級工程師,研究方向:電氣工程。
基金項目:國網黑龍江科技資助項目(項目編號:52140018001Y)。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國科技博覽(2016年18期)2016-10-19 08:22:54
電腦知識與技術(2016年21期)2016-10-18 23:33:47
科技視界(2016年21期)2016-10-17 20:00:58
科技視界(2016年21期)2016-10-17 19:54:47
