基于FPGA控制的車載光能收集系統(tǒng)
2022-06-10 07:26:22馮梓浩
電子制作 2022年11期
關鍵詞:系統(tǒng)
馮梓浩
(廣西師范大學,廣西桂林,541004)
0 引言
隨著新能源的發(fā)展,太陽能發(fā)電得到了廣泛的市場關注[1]。但現(xiàn)有市場主要的產(chǎn)品均為太陽能發(fā)電板安裝在不同的裝置,由于氣候的因素,實時的光照各不相同,因此大多數(shù)相關發(fā)電效率不穩(wěn)定[2]。本文基于一種高性能Stratix III FPGA芯片控制的移動式車載光能收集系統(tǒng),可實時根據(jù)收集到的數(shù)據(jù)計算出收集太陽能的最佳位置。
1 系統(tǒng)的整體結構
本次項目主要對基于FPGA控制的車載光能收集系統(tǒng)進行研究設計,將FPGA為主控制器,由于FPGA相對于單片機具有并行試行等優(yōu)點,在實時數(shù)據(jù)采集與發(fā)送數(shù)據(jù)之間不存在時間差,也就是說系統(tǒng)的收發(fā)可以變?yōu)橐惑w化,減少中間因為收集采集和發(fā)送所損失的太陽能位置信息。同時針對于現(xiàn)有的太陽能板運輸車一般采用鋰電池作為動力,充電時間一般較長,嚴重影響車輛的使用效率,本系統(tǒng)車輛將車頂改為太陽能電池板,能夠?qū)崿F(xiàn)邊工作邊充電,但是傳統(tǒng)太陽能電池板的安裝位置大多是固定的,而這種方式不能夠根據(jù)太陽的位置,進行調(diào)整太陽能電池板的照射角度,從而導致充電效率較低,所以存在不便于調(diào)節(jié)角度的缺陷,為此我們提出新型太陽能板,解決以上提出的問題。
本系統(tǒng)由光照傳感器模塊、電機模塊、GPS模塊、FPAG主控、光伏太陽能板、升壓模塊和儲能電池組成。如圖1所示。

圖1 系統(tǒng)總構成
2 系統(tǒng)的軟硬件總體
2.1 系統(tǒng)總體功能
基于FPGA的車載光伏收集系統(tǒng)其主要作用為通過各模塊間的數(shù)據(jù)進行角度調(diào)整從而使光伏太陽能板的轉(zhuǎn)化效率提高。由GPS模塊采集車速信息以及光照傳感器模塊采集光所在的方位反饋至FPGA主控芯片中進行處理并發(fā)送控制電機調(diào)整光伏太陽能板的控制指令,使其面向光強度高的一方;光伏太陽能板將轉(zhuǎn)化的電能通過升壓模塊升壓到可以電動汽車需要的伏數(shù)后,將其儲存在儲能電池中,待電動汽車使用時將其釋放。
2.2 硬件電路設計
2.2.1 主控制器
要做到快速的同時處理GPS以及光照傳感器模塊反饋的實時數(shù)據(jù)并發(fā)送控制指令,需要一個高算力的芯片;本次采用的芯片為Stratix III高端芯片,該芯片具有優(yōu)異的特性、極高極快的算力、具有業(yè)界最佳的信號完整性和設計安全性、能夠在邏輯陣列模塊 (LAB) 級進行編程符合本次模擬設計。
2.2.2 光伏太陽能板
移動式太陽能收集板,包括調(diào)節(jié)箱,所述調(diào)節(jié)箱內(nèi)腔底部的左側(cè)固定安裝有電機,所述電機的輸出端固定連接有螺桿,所述螺桿的右端通過軸承與調(diào)節(jié)箱的連接處轉(zhuǎn)動連接,所述螺桿的外表面螺紋連接有套筒,所述套筒的頂部固定連接有驅(qū)動板,所述調(diào)節(jié)箱的頂部滑動連接有活動板,所述驅(qū)動板的頂部貫穿調(diào)節(jié)箱且與活動板的連接處固定連接,所述調(diào)節(jié)箱頂部左側(cè)的前后位置均固定連接有定位板,兩個所述定位板相對一側(cè)的頂部均通過軸承轉(zhuǎn)動連接有轉(zhuǎn)軸,兩個所述轉(zhuǎn)軸相對的一端固定連接有承載板,所述承載板的頂部固定安裝有太陽能電池板本體,所述活動板頂部的前后位置均通過活動軸活動連接有推板,所述推板遠離活動板的一端通過活動軸與承載板的連接處活動連接。
圖2中:1、調(diào)節(jié)箱;6、活動板;7、定位板;8、轉(zhuǎn)軸;9、承載板;10、太陽能電池板本體;11、推板;14、滑軌;16、安裝板;17、擋板;18、橡膠墊。所述調(diào)節(jié)箱的正面通過螺絲固定連接有擋板,所述調(diào)節(jié)箱的底部粘接有橡膠墊。

圖2 光伏太陽能板
2.2.3 光照傳感器
本次設計采用BH1750光照傳感器,該傳感器具有功耗小,體積小,支持兩個IIC地址,最高支持400kbps的傳輸速率,對于本次模擬設計來說足矣,如圖3所示。
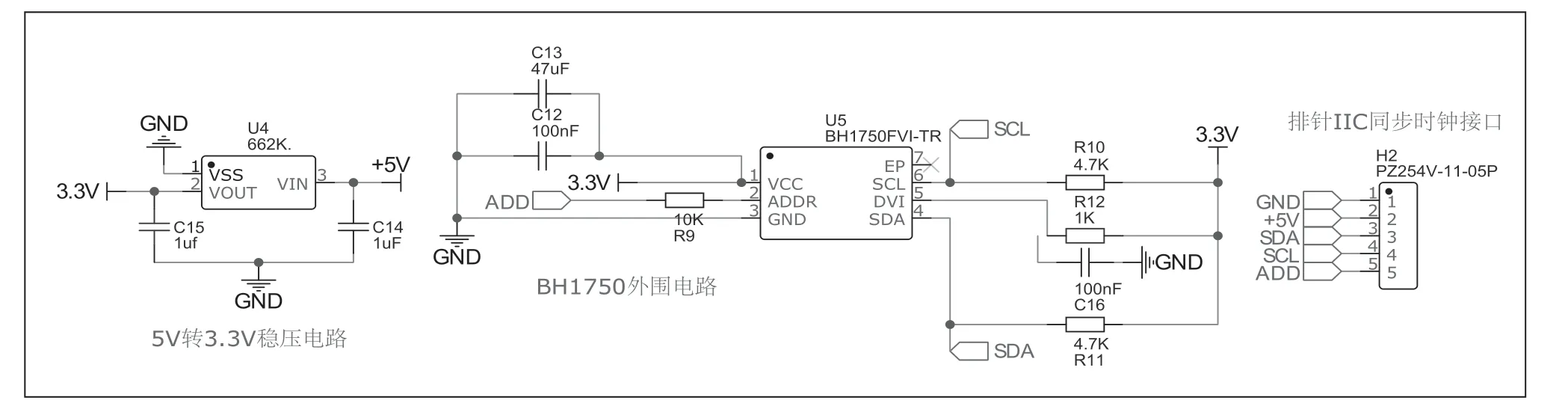
圖3 光照傳感器模塊
兩個IIC地址可以通過排針上面的地址引腳ADDR來選擇,接GND時器件地址為0100011 ,接VCC時器件地址為1011100。通過SDA數(shù)據(jù)信號線和SCL時鐘線與主控芯片相連進行數(shù)據(jù)傳輸。
2.2.4 GPS模塊
本次模擬設計定位部分采用E108-GN01高集成度多模衛(wèi)星定位導航模塊,原理圖如圖4所示。

圖4 GPS模塊
本次設計將GPS模塊作為從機與FPGA主板通過串口進行通訊,端口間使用安卓數(shù)據(jù)線進行連接,上電時V-RF亮起代表天線正常工作,使用有源天線來增強信號,定位成功后IPPS開始閃爍,此時便可進行串口通訊。使用TXD來發(fā)送數(shù)據(jù)至FPAG主板進行處理,RXD接收來自FPGA主板的數(shù)據(jù)并解析其指令來進行相應工作,數(shù)據(jù)發(fā)送成功后TXD串口指示燈便亮起,以此來完成從機與主機之間的通訊。
2.2.5 升壓模塊
本次模擬設計采用96片太陽能電池組件,單片電壓約為0.4~0.7V,總電壓約在48V左右,在升壓模塊中經(jīng)過線圈升壓到可以啟動電動車的伏數(shù),通過整流橋整流成單向的脈動直流電,脈動直流電經(jīng)過濾波電路變成平滑的直流電,濾波后再經(jīng)過穩(wěn)壓器穩(wěn)壓,得到基本不受外界影響的直流電源輸出,如圖5所示。

圖5 升壓模塊
2.2.6 電機模塊
本次模擬電機設計使用BTN7970 電機驅(qū)動板,具有四路通道輸出,可實現(xiàn)電機正反轉(zhuǎn),雙路 PWM 波控制,具備電流反饋穩(wěn)定輸出和檢測電機工作狀態(tài)的功能,部分電路原理圖6所示。

圖6 電機模塊
2.3 軟件程序設計
2.3.1 主程序運行流程圖
系統(tǒng)運行時,先進行初始化,接著主控芯片開始接收GPS定位模塊以及光照傳感器實時采集數(shù)據(jù)并進行分析,并發(fā)送指令通過偏差信號控制電機調(diào)整光伏太陽能板的位置。具體運行程序如圖7所示。

圖7 主程序流程圖
2.3.2 子程序運行流程圖
(1)光照傳感器模塊
本次模擬設計ADDR引腳是接在GND上,且使用的模式為連續(xù)測量高分辨率模式。在程序上,先發(fā)送上電命令(0x01)并初始化;接著進行連續(xù)測量:寫入起始信號(ST),之后寫入器件地址和讀寫位(本次使用的器件地址0100011),然后寫入應答位,再而寫入測量的命令(0x10)并應答,最后寫入結束信號(SP);測量結束后進行數(shù)據(jù)讀取:寫入起始信號(ST),接著器件地址和讀寫位,之后是應答位,緊接著接收1個字節(jié)的數(shù)據(jù)SDA引腳從輸出改成輸入,接收結束后寫入結束信號(SP)。如圖8所示。

圖8 光照傳感器模塊子程序流程圖
(2)GPS模塊子程序流程圖
GPS接收器利用多普勒效應計算車的前進速度,通過衛(wèi)星進行準確的三維坐標定位并進行測速,開始時讀取接收機偽距數(shù)據(jù)進行求導得出多普勒觀測方程,獲得方程單差后計算G矩陣利用最小二次方求得未知數(shù)據(jù)并使其與實際數(shù)據(jù)的誤差平方和最小,根據(jù)誤差去進行校正;當定位收斂誤差小于0.001時,更新接收機位置并返回到計算G矩陣,否則輸出數(shù)據(jù)至FPAG主板,該數(shù)據(jù)為當前車速。

圖9 GPS子程序流程圖
(3)電機模塊
主控芯片將分析完后的數(shù)據(jù)產(chǎn)生一個控制信號去控制電機來轉(zhuǎn)動太陽能板。程序設計如圖10所示。

圖10 電機模塊子程序流程圖
3 結論
本文的移動式車載光能收集系統(tǒng),不僅在一定范圍內(nèi)能夠最大效率收集太陽能,并且系統(tǒng)自身消耗能量較少,通過GPS和傳感器的相互配合能獲得更多的電能,滿足日常駕駛的能源需求。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32