基于STM32的智能駕駛頭盔系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2022-06-10 07:26:30莊初鵬龍諾春楊建平陳浩濤黃睿
電子制作 2022年11期
關(guān)鍵詞:單片機(jī)
莊初鵬,龍諾春,楊建平,陳浩濤,黃睿
(廣東白云學(xué)院 電氣與信息工程學(xué)院,廣東廣州,510450)
0 引言
中國是電動(dòng)車和摩托車擁有量最多的國家之一,電動(dòng)車和摩托車作為最受歡迎的便捷交通工具,它們?cè)趲肀憷耐瑫r(shí),頻繁出現(xiàn)的交通事故也是一個(gè)社會(huì)痛點(diǎn)。隨著“一盔一帶”的推行和頭盔佩戴率的上升,智能頭盔的種類呈現(xiàn)高速發(fā)展趨勢(shì)。現(xiàn)有如“基于STM32單片機(jī)的騎行者智能頭盔系統(tǒng)設(shè)計(jì)”[1]可以監(jiān)測(cè)駕駛員體溫、心率等身體狀況、GPS定位功能;“基于Arduino的碰撞報(bào)警與監(jiān)測(cè)智能頭盔”[2]可以監(jiān)測(cè)駕駛員監(jiān)測(cè)體溫、心率等身體狀況,遇到碰撞等危險(xiǎn)會(huì)發(fā)送求助信息給緊急聯(lián)系人;“基于STM32 智能騎行頭盔的設(shè)計(jì)”[3]實(shí)現(xiàn)騎行視頻錄制、GPS定位、音頻播放、轉(zhuǎn)向提示等功能。傳統(tǒng)智能頭盔僅是增加附加功能[4],少有針對(duì)駕駛安全方面的設(shè)計(jì)。本智能頭盔將針對(duì)駕駛安全方面進(jìn)行設(shè)計(jì),經(jīng)過交通事故因素分析[5-6],得出由個(gè)人主觀失誤導(dǎo)致發(fā)生事故主要有以下幾點(diǎn)因素:駕駛時(shí)注意力不集中;彎道、轉(zhuǎn)彎等路況沒注意觀察后方有無來車;出現(xiàn)緊急情況時(shí)反應(yīng)時(shí)間長、剎車不及時(shí)。針對(duì)上述因素,該頭盔設(shè)計(jì)實(shí)現(xiàn)以下功能:使用激光雷達(dá)PLS-P400監(jiān)測(cè)前方物體距離,結(jié)合毫米波雷達(dá)DM-19捕獲物體靠近速度,經(jīng)過軟件算法判斷是否會(huì)發(fā)生碰撞危險(xiǎn);毫米波雷達(dá)DM-19監(jiān)測(cè)左后方、右后方來車;通過姿態(tài)傳感器JY901實(shí)時(shí)監(jiān)測(cè)駕駛員駕駛狀態(tài)。利用語音模塊JR6001播放系統(tǒng)提示語音詞條。擁有前、后及兩側(cè)等各方檢測(cè)功能。“駕駛安全智能頭盔”補(bǔ)充電動(dòng)車、摩托車安全性能短板,對(duì)于電動(dòng)摩托車事故的減少有重要意義。
1 系統(tǒng)總體設(shè)計(jì)
為了減少頭盔本身的重量以及提高傳感器工作的穩(wěn)定性,系統(tǒng)采用一個(gè)主機(jī)兩個(gè)從機(jī)工作模式,主機(jī)從機(jī)之間采用2.4G頻率無線通信,硬件的安裝位置如圖1所示。頭盔為主機(jī),負(fù)責(zé)連接從機(jī)、姿態(tài)分析、語言提示。安裝于車頭的傳感器為從機(jī)1,負(fù)責(zé)判斷前方是否發(fā)生碰撞危險(xiǎn)、與主機(jī)通信。安裝于車尾的傳感器為從機(jī)2,負(fù)責(zé)監(jiān)測(cè)后方來車、與主機(jī)通信。系統(tǒng)組成圖如圖2所示。主控芯片為STM32,主機(jī)中姿態(tài)分析傳感器作為輸入端,震動(dòng)器和語音模塊作為輸出端,無線通信模塊作為信息輸入和信息輸出端。從機(jī)1中毫米波雷達(dá)和激光雷達(dá)作為信息輸入端,從機(jī)2中毫米波雷達(dá)作為信息輸入端。

圖1 硬件位置示意圖

圖2 系統(tǒng)組成框圖
2 硬件設(shè)計(jì)
2.1 頭盔(主機(jī))硬件結(jié)構(gòu)
硬件結(jié)構(gòu)示意圖如圖3所示,主要由喇叭、震動(dòng)器、藍(lán)牙多媒體模塊、語音模塊JR6001、無線通信模塊NRF24l01-01S、姿態(tài)傳感器JY901[7]、主控芯片STM32F103RCT6構(gòu)成。姿態(tài)傳感器檢測(cè)到不正確駕駛姿勢(shì)時(shí),會(huì)觸發(fā)語音模塊做出相應(yīng)的語言提示。無線通訊模塊接受到前后端傳感器發(fā)送的報(bào)警信息時(shí)也會(huì)觸發(fā)相應(yīng)的報(bào)警和提示,同時(shí)可以發(fā)送相應(yīng)的指令給從機(jī)。藍(lán)牙多媒體模塊獨(dú)立于報(bào)警系統(tǒng),可以連接藍(lán)牙設(shè)備。電路接線如圖4所示,姿態(tài)傳感器JY901連接到串口2,語音模塊JR6001連接到串口3,無線通信模塊NRF24l01-01S連接單片機(jī)定義的6個(gè)SPI通信I/O口。
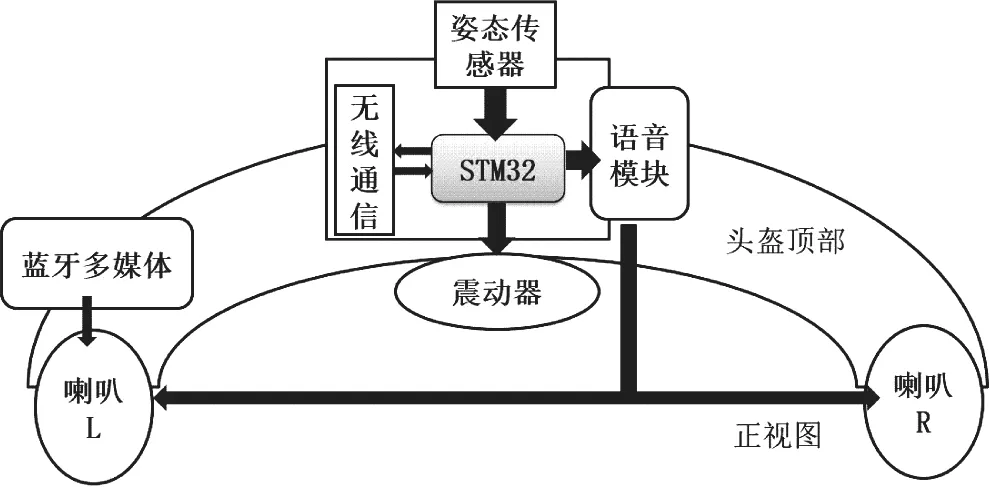
圖3 主機(jī)硬件結(jié)構(gòu)示意圖

圖4 主機(jī)模塊與單片機(jī)連接圖
2.2 從機(jī)1硬件結(jié)構(gòu)
從機(jī)1主要由激光雷達(dá)PLS-P400、毫米波雷達(dá)DM-19、無線通信模塊NRF24l01-01S、主控芯片STM32F103C8T6構(gòu)成,硬件結(jié)構(gòu)如圖5所示。激光雷達(dá)獲取前方物體的距離數(shù)據(jù)、毫米波雷達(dá)監(jiān)測(cè)前方物體靠近的速度,經(jīng)過主控芯片相應(yīng)的算法分析是否會(huì)發(fā)生危險(xiǎn)。相應(yīng)的信息通過無線通訊模塊發(fā)送信息到主機(jī)中,由主機(jī)發(fā)出相應(yīng)的語音提示或者警報(bào),同時(shí)也可接受主機(jī)發(fā)送過來的校準(zhǔn)指令。電路接線如圖6所示,激光雷達(dá)PLS-P400連接到串口2,毫米波雷達(dá)DM-19連接到串口3,無線通信模塊NRF24l01-01S連接單片機(jī)定義的6個(gè)SPI通信I/O口。

圖5 前向傳感器硬件結(jié)構(gòu)圖

圖6 從機(jī)1模塊與單片機(jī)連接圖
2.2.1 激光雷達(dá)PLS-P400原理
激光雷達(dá)原理示意圖如圖7所示,激光發(fā)射器的發(fā)射端發(fā)出一束經(jīng)過系統(tǒng)編譯的脈沖激光[8],發(fā)射的激光遇到物體時(shí)會(huì)有一定的反射率,反射的激光雖然會(huì)受物體的影響,但是經(jīng)過編譯的脈沖信息可以直接被識(shí)別,可以區(qū)于環(huán)境噪聲,最大減少了環(huán)境噪聲影響。激光接收端接收經(jīng)過物體表面調(diào)制的脈沖后,分析被調(diào)制之后的簽名,從中準(zhǔn)確計(jì)算出二者的飛行時(shí)間t,已知光速c,推出距離D的計(jì)算公式:。模塊參數(shù)如表1所示,引腳連接單片機(jī)對(duì)應(yīng)接口。

圖7 激光雷達(dá)原理示意圖

表1 激光傳感器引腳參數(shù)表
2.2.2 毫米波雷達(dá)DM-19原理
毫米波雷達(dá)測(cè)速原理[9]是利用發(fā)射電磁波遇到移動(dòng)的物體,物體把電磁波回傳之后接受到變化的頻率,產(chǎn)生多普勒效應(yīng)[10]來判斷物體的位移。毫米波雷達(dá)發(fā)射頻率為f;接收到的物體反射回波頻率為f±fp(其中fp為多普勒頻率[8]);目標(biāo)的相對(duì)速度v的關(guān)系為(其中c為光速);由此得(其中,,為發(fā)射電磁波的波長);安裝方位和測(cè)量距離的對(duì)應(yīng)關(guān)系如圖8所示。模塊參數(shù)如2表所示,對(duì)應(yīng)引腳連接單片機(jī)對(duì)應(yīng)接口。

圖8 DM—19安裝角度和測(cè)量距離的對(duì)應(yīng)關(guān)系

表2 毫米波雷達(dá)引腳參數(shù)表
2.3 從機(jī)2硬件結(jié)構(gòu)
從機(jī)2主要由電池、毫米波雷達(dá)PLS-P40、無線通信模塊NRF24l01-01S、主控芯片STM32F103C8T6組成,硬件結(jié)構(gòu)如圖9所示。毫米波雷達(dá)獲取左右后方車輛靠近的速度數(shù)據(jù),經(jīng)過主控芯片的算法分析來辨別來車情況,處理后的信息通過無線通訊模塊發(fā)送信息到主機(jī)中,由主機(jī)發(fā)出相應(yīng)的語音提示或者警報(bào),同時(shí)也可接受主機(jī)發(fā)送過來的校準(zhǔn)指令。接線如圖10所示,毫米波雷達(dá)1連接到串口2,毫米波雷達(dá)2連接到串口3,無線通信模塊NRF24l01-01S連接單片機(jī)定義的6個(gè)SPI通信I/O口。

圖9 后向傳感器硬件結(jié)構(gòu)圖

圖10 從機(jī)2模塊與單片機(jī)連接圖
3 軟件設(shè)計(jì)
3.1 系統(tǒng)總體邏輯設(shè)計(jì)
系統(tǒng)軟件邏輯流程如圖11所示,系統(tǒng)軟件主要有語音提示系統(tǒng)、無線通信系統(tǒng)、姿態(tài)分析函數(shù)、速度和距離分析函數(shù)。主機(jī)和從機(jī)都有獨(dú)立的MCU,各自獨(dú)立的處理系統(tǒng),主機(jī)與兩個(gè)從機(jī)之間使用無線通信。前傳感器讀取前方距離和靠近速度經(jīng)過算法處理,若需要報(bào)警則通過無線模塊向頭盔主機(jī)發(fā)送報(bào)警信息。后傳感器獲取后方物體靠近速度,經(jīng)過算法處理判斷后方來車,若需要報(bào)警則通過無線模塊向頭盔主機(jī)發(fā)送報(bào)警信息。頭盔主機(jī)接受報(bào)警信號(hào)后,系統(tǒng)觸發(fā)相應(yīng)語音提示信息。姿態(tài)經(jīng)過算法分析,檢測(cè)到不恰當(dāng)姿態(tài)時(shí)觸發(fā)語音模塊播報(bào)相應(yīng)語音,震動(dòng)器為輔助提示用,由芯片接MOS管驅(qū)動(dòng)。

圖11 總體邏輯示意圖
程序流程如圖12所示,系統(tǒng)開啟后等待主機(jī)與從機(jī)連接,連接成功后同時(shí)開始監(jiān)測(cè)姿態(tài)、碰撞預(yù)警、后方來車等程序,其中滿足觸發(fā)條件會(huì)進(jìn)入語言播放程序,如果沒有及時(shí)調(diào)整回正確駕駛狀態(tài),會(huì)觸發(fā)震動(dòng)報(bào)警程序。

圖12 系統(tǒng)程序流程圖
3.2 模塊的數(shù)據(jù)分析
3.2.1 姿態(tài)傳感器數(shù)據(jù)分析
姿態(tài)檢測(cè)使用串口通信(USART),通信數(shù)據(jù)包位16進(jìn)制,數(shù)據(jù)表如表3、表4所示,數(shù)據(jù)來源模塊官方資料(維特智能JY901 姿態(tài)角度傳感器)。

表3 姿態(tài)分析角速度輸出

表4 姿態(tài)分析角度輸出
角速度計(jì)算公式:

角度計(jì)算公式:

溫度計(jì)算公式:

3.2.2 毫米波雷達(dá)數(shù)據(jù)分析
模塊使用串口通訊(USART),返回?cái)?shù)據(jù)說明: 返回字符串“v (km/h) is xx++++”: 檢測(cè)到正在遠(yuǎn)離的目標(biāo),速度為 xx km/h。返回字符串“v (km/h) is xx----”: 檢測(cè)到正在靠近的目標(biāo),速度為 xx km/h。直達(dá)目標(biāo)離開雷達(dá)的有效監(jiān)測(cè)范圍。速度的值在字符13位14位,將字符類型的數(shù)字轉(zhuǎn)化為整型數(shù)字即可(單位km/h),通過判斷第15至16位字符是“+”或“-”來確定目標(biāo)正在遠(yuǎn)離或靠近。
3.2.3 激光雷達(dá)程序設(shè)計(jì)
激光測(cè)距雷達(dá)通信協(xié)議是構(gòu)建在串口通信協(xié)議基礎(chǔ)之上的應(yīng)用層協(xié)議,協(xié)議最大幀長度為 8字節(jié),使用小端格式。數(shù)據(jù)包結(jié)構(gòu)如表5所示,數(shù)據(jù)來源模塊官方資料(派歐機(jī)電-激光雷達(dá)PLS-P400)。

表5 激光雷達(dá)數(shù)據(jù)包結(jié)構(gòu)
Bytes:表示字節(jié)個(gè);Key:功能配置位;Value:數(shù)據(jù)位。
4 結(jié)語
本文設(shè)計(jì)的“駕駛安全預(yù)警頭盔”沒有車輛類型的限制,只要駕駛?cè)税杨^盔戴上,在車上安裝好傳感器分塊,可以便捷的安裝在任何車輛上,不需要對(duì)車輛進(jìn)行改裝。主、從機(jī)使用無線通信工作方式,各部分獨(dú)立運(yùn)行,保證運(yùn)行速度同時(shí)減少相互干擾。部分傳感器安裝于車上,增加穩(wěn)定性、減少頭盔的重量。使用姿態(tài)傳感器監(jiān)測(cè)駕駛員頭部狀態(tài),發(fā)現(xiàn)不正常駕駛狀態(tài)時(shí)及時(shí)警報(bào)提醒駕駛員,并帶有語音提醒、無線通信等功能。前傳感器使用激光雷達(dá)可探測(cè)遠(yuǎn)距離物體,毫米波雷達(dá)監(jiān)測(cè)速度結(jié)合算法提前預(yù)警碰撞的發(fā)生。后傳感器使用兩個(gè)毫米波雷達(dá)結(jié)合算法檢測(cè)后方來車。設(shè)計(jì)實(shí)現(xiàn)了電動(dòng)車、摩托車小型車的后方來車提醒,碰撞預(yù)警等駕駛安全輔助功能,同時(shí)還能監(jiān)測(cè)駕駛狀態(tài),減少因駕駛員駕駛狀態(tài)不佳而導(dǎo)致的事故,具有較大的實(shí)際應(yīng)用價(jià)值。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36