車路協同試驗場設計建設:歷史、現狀和展望
2022-06-11 12:16:36徐高鵬孫佳優姚丹亞
山西交通科技 2022年2期
周 銳,徐高鵬,金 濤,孫佳優,李 力,姚丹亞
(1.青島慧拓智能機器有限公司,山東 青島 266000;2.中汽研汽車工業工程(天津)有限公司,天津 300300;3.深圳慧拓無限科技有限公司,廣東 深圳 518000;4.清華大學,北京 100084)
致謝:
清華大學姚丹亞教授對論文的思路觀點、現狀分析、技術路線和結論方面給予指導,并在審閱時提出了寶貴修改意見,在此致以衷心感謝!
0 引言
車路協同采用先進的無線通信和新一代互聯網等技術,全方位實施車車、車路動態實時信息交互,并在全時空動態交通信息采集與融合的基礎上,開展車輛主動安全控制和道路協同管理,充分實現人、車、路的有效協同,保證交通安全,提高通行效率,從而形成安全、高效和環保的道路交通系統[1]。然而作為當前智慧交通領域最熱門的研究方向與商業化目標,開發成熟可靠的車路協同系統尚需細致和大量的測試。不僅要求要在ETC、車位地磁檢測等傳統車路協同功能測試之外,對車輛與網聯設備的協同適應功能進行測試,還應當重點測試智能路側設備對車輛賦能的交通環境感知應對能力、復雜交通場景的決策規劃能力。由此帶來新智能交通場景測試試驗需求是傳統測試場所不能滿足的,因為需要設計與建設具備車路協同與智能網聯測試能力的新型汽車試驗場。
1 國內外車路協同系統的發展歷史
與新能源汽車一樣,車路協同并不是21世紀的新產物,廣義的車路協同概念是通過各種路側設施設備向車端駕駛員傳遞信息,為其做出合理適當的駕駛行為提供參考。早在古代社會道碑、里程碑就已經能夠起到此種作用,而后隨著技術進步,紅綠燈、廣角鏡、道路標志、指示牌等利用物理光學原理與ETC、地磁檢測等利用電子通信原理進行道路信息傳遞的設施得以廣泛應用,形成現代交通中重要的組成部分。而現今互聯網技術發展所帶來的科技躍遷,勢必會向交通領域引入新的技術與手段來保障安全與暢通。
世界上第一套車路協同系統出現在20世紀50年代,由通用汽車在新澤西州一條高速公路上部署大量通信設備,其也被認為是現代車路協同系統的雛形;隨后1992年由休斯公司提出的DSRC標準被ASTM提交討論并于1998年通過。與此同時,日本在20世紀90年代將智能交通系統確立為國家項目,并于2007年完成了位于東京場區公路的“Smartway”試驗,2011年實現1 600臺ITS Spot System路側設備的安裝,其中城際高速路上安裝間距10~15 km,城市快速路上安裝間距4 km,可以為過往車輛提供自適應巡航、盲區監測、電子付費等服務支持。歐洲車路協同研究與美日基本同期,但是由于其國家眾多且大多國土面積較小,基本由歐盟統一推進且十分注重協議與標準,于2006年主導開啟了車路合作系統項目——CVIS(Cooperative Vehicle-Infrastructure System),主要在法國、德國、意大利、荷蘭、比利時和英國等國家針對城市車路協同、城際車路協同、海運和航運協同以及協同監測等技術集成應用開展測試與示范。
我國的車路協同系統研究起步較晚,最早可追溯到2007年的863計劃中“交通對象協同式安全控制技術”,隨后由清華、同濟、華南理工等高校率先在各地開展車路協同研究與試驗,形成了包括地磁誘導系統、車道保持、不停車收費系統等成果[2]。于2011年正式在863計劃中設立“智能車路協同關鍵技術研究”,隨后在“十二五”“十三五”與“十四五”計劃中均被列為重大專項得以推進。
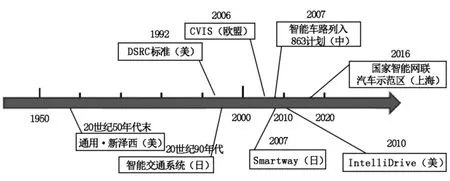
圖1 國內外車路協同發展圖
2 國內外車路協同試驗場的建設思路
隨著車路協同系統由物理化、電子化向智能化與網聯化的發展,尤其是集成5G、LTE-V和DSRC等多模通信技術,融合點云、圖像等多源傳感器數據的智能路側設備出現,加上引入有邊緣計算單元與云控平臺,未來的車路協同系統勢必在復雜性、多樣性、可靠性與安全性上快速發展,與之對應的是同樣快速增長的測試需求。而傳統測試方案與手段不能滿足要求,必須尋找新的測試方案。
當前國內外車路協同試驗場建設主要有兩個思路。一種是從真實交通角度出發,基于公開道路改建開放測試路段,建設成本低、周期短、公里數長但針對性較弱且拓展受限。較為典型的是美國弗吉亞Northern Virginia Test Bed,其是由29號、50號、66號與495號州際高速公路的部分區段改建而來,在弗吉亞州前25個嚴重擁堵路端部署有49臺RSU,旨在通過真實交通數據檢驗DSRC設備對于道路交通信息的感知和分發能力,是美國北部唯一一條具有自動駕駛、智能網聯與智慧交通測試能力的道路。與之相似的還有日本的Smartway,歐盟的Safe Spot等。
另一種思路是從車輛測試角度出發,基于傳統試車場改建或新建封閉測試場,針對性強、可塑性高、適應度廣但建設成本高、周期長且難以短期內盈利。與上述Northern Virginia Test Bed相鄰的Smart Roads Test Bed便是如此,其不以交通行為的真實性為首要目標,反而尋求極限的測試邊界性質和多變的定制場景,因而僅部署10臺RSU。與之相似的還有英國的Mira City Circuit測試場,韓國的K-City等。本文主要介紹封閉測試場的部分,開放道路測試的部分將在其他論文中單獨進行闡述。
我國基于近10年來在車路協同領域的布局與發展,目前已經在C-V2X、5G等新一代車路協同通信標準制定中發揮越來越重要的作用,相應車路協同試驗場建設也后發先至。開放測試路段包括上海臨港智能網聯汽車封閉測試區、國家智能汽車與智慧交通(京冀)示范區與江蘇(無錫)、天津(西青)、湖南(長沙)、重慶(兩江新區)等4個國家級車聯網先導區。封閉測試場也有國家智能汽車與智慧交通(京冀)示范區順義基地、武漢智能網聯汽車測試場、中汽中心(鹽城)汽車試驗場與江西上饒新能源智能化汽車綜合試驗場等陸續建設與投入使用。
3 智能網聯汽車試驗場設計
3.1 設計流程
由于上述問題的存在,亟需一套系統科學、標準統一的智能網聯試驗場設計基準。基于對國內外已建智能網聯試驗場的對標分析與智能網聯試驗場的基本特點與測試需求系統梳理,研究者逐步整理出一套行之有效的設計綱領,系統性地提出具有普適系統性智能網聯試驗場的規劃設計方法論,旨在滿足涵蓋《SAE J3016駕駛自動化分級》所定義的L1~L5全階段的智能網聯基本測試和拓展測試的試驗場規劃設計需求[3],解決了上述建設標準缺失、建設協同性差等問題。以下,本文將以慧拓智能機器有限公司的設計綱領為例來分別介紹智能網聯汽車試驗場的設計和建造,從前期項目策劃、立項可行性分析到項目工藝工程設計,最終至施工圖落地,具體的規劃設計流程如圖2所示。
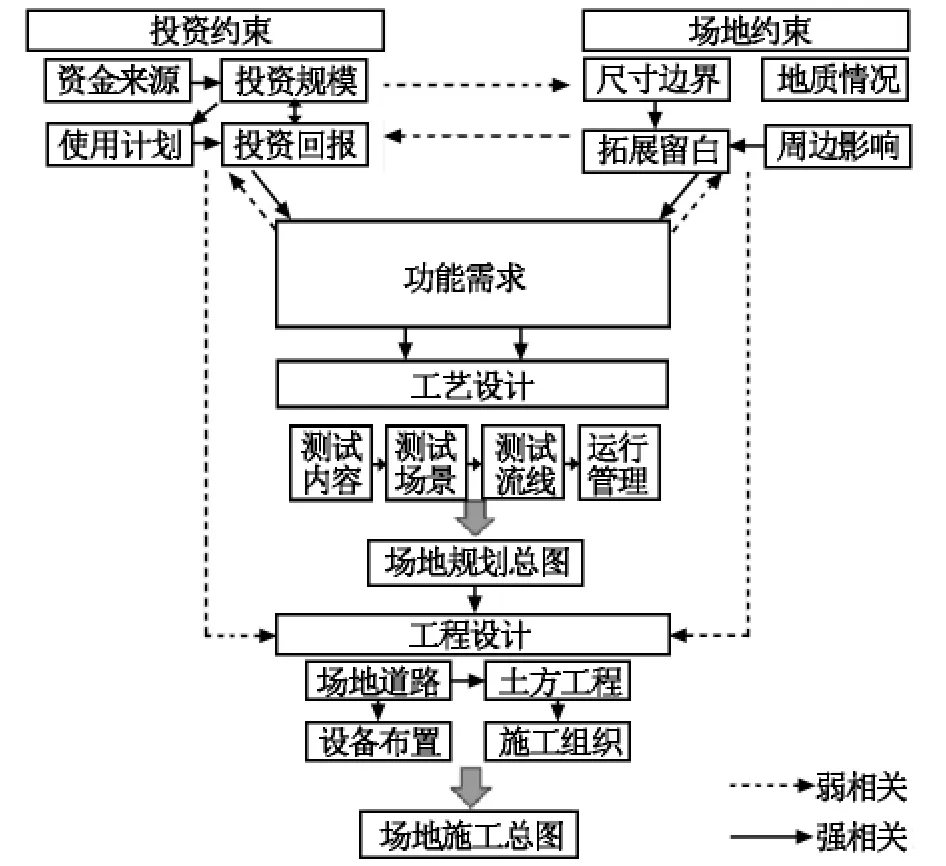
圖2 智能網聯汽車試驗場規劃設計流程圖
功能需求為測試場設計的核心,同時功能需求又需要受到投資規模以及場地規模的約束。確定了相應的需求之后需要進行初步的工藝設計形成規劃總圖,并基于此進行詳細的工程設計形成場地施工總圖,以下將對設計步驟進行詳細說明。
3.1.1 試驗場功能需求
為了解決智能網聯試驗場功能需求確定困難,容易出現需求考慮不全面,或者測試對象考慮不完整的問題,本章節系統地提出了試驗場功能需求的確定方法及邏輯依據。智能網聯試驗場的規劃設計需要先確定試驗場的測試功能內容和整體服務定位,以此作為規劃設計的基礎設計根據。
該階段主要在項目前期和項目可行性研究階段完成,但主要決定了試驗場的規劃設計方案和內容,是規劃設計的核心。解決了試驗場設計之初如何確定定位、如何確定測試對象與功能以及如何出具規劃設計方案的問題。
3.1.1.1 外部資源環境產業結合與定位
該部分解決的是試驗場如何定位的問題,需要結合建設單位性質、地區行業特點來確定。智能網聯試驗場的建設一般由政府、企業、高校或研究機構主導,政府為了帶動智能網聯產業或者某個價值鏈發展建設智能網聯試驗場作為公共示范區或先導區;企業為了滿足自身產品的測試驗證和開發建設專屬試驗場;高校或研究機構為了某項技術的測試驗證或行業發展而建設特定試驗場[4]。
因此規劃建設智能網聯試驗場時首先需要分析建設目的與服務的產品或產業,從產品、產業鏈角度調查梳理試驗場的服務能力與建設方內外部資源和需求的匹配,以此確定試驗場的整體定位,確定智能網聯等級L1~L5的層次定位,也作為將來運營投資回報和營收的主要計算依據。
3.1.1.2 測試對象、車型確定
該部分解決測試對象如何確定的問題,需要根據整體定位、測試的產品和技術項目,確定測試對象與車型,以此確定設計中需要滿足的關鍵測試物理空間尺寸。
3.1.1.3 功能確定
該部分解決的是試驗場要滿足哪些功能的問題,需要確定路試測試功能和配套服務功能。
根據測試定位與測試對象,路試測試功能根據現行國家部委以及中國汽車工業協會(CAAM)、中國汽車工程學會(CSAE)、中國公路學會(CHTS)等社會團體、地方標準等梳理出之前定位對應的測試等級(L1~L5)的測試項目,主要明確是研發測試還是強制性測試以及對應的第幾等級以下的測試功能和項目。
配套服務功能需要確定試驗場的試驗準備和生活服務功能,主要需要根據定位確定試驗場的服務能力、容量、人員數量和設備種類,從而確定試驗準備車間、公用設施廠房、試驗監控設施、試驗管理設施、辦公、生活設施等數量內容。
3.1.1.4 建設內容規劃
該部分解決的是如何合理規劃建設內容的問題,根據確定的功能,對應每項測試項目,明確建設的主要道路種類、規模、尺寸要求;確定擬建建筑的建筑面積和規模體量。
3.1.2 投資規模確定
為了解決智能網聯試驗場投入產出難以測算,容易出現因前期測算失誤而導致項目中期不能順利推進,或者投資方認定預期內難以回本,投資信心不足的問題,本章節系統地提出了試驗場投資規模的確定方法及邏輯依據。該階段主要在前期和項目可行性研究階段完成,決定了規劃方案內容的取舍和規模。回答了如何出具項目經濟可行性報告的問題。
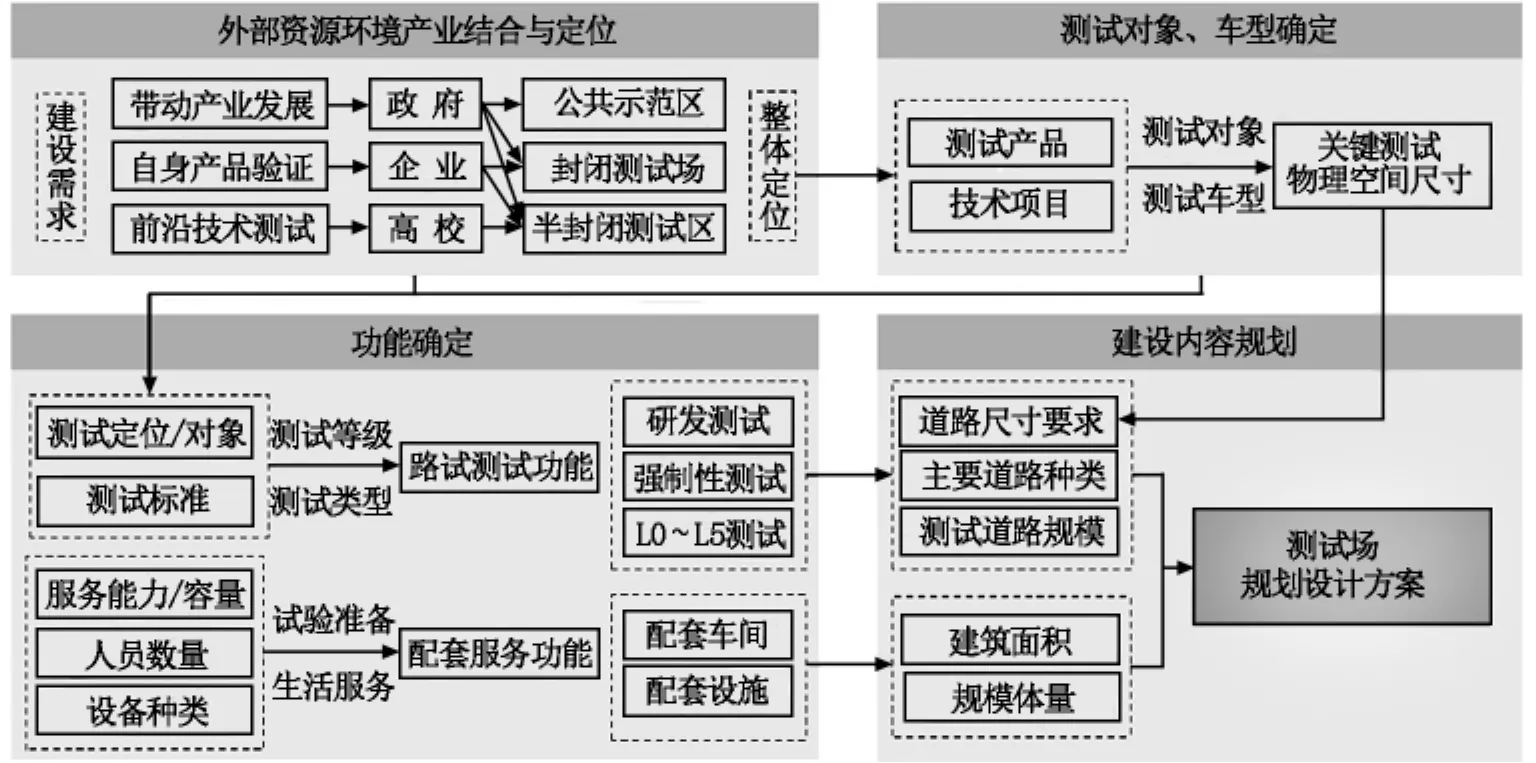
圖3 試驗場功能定位
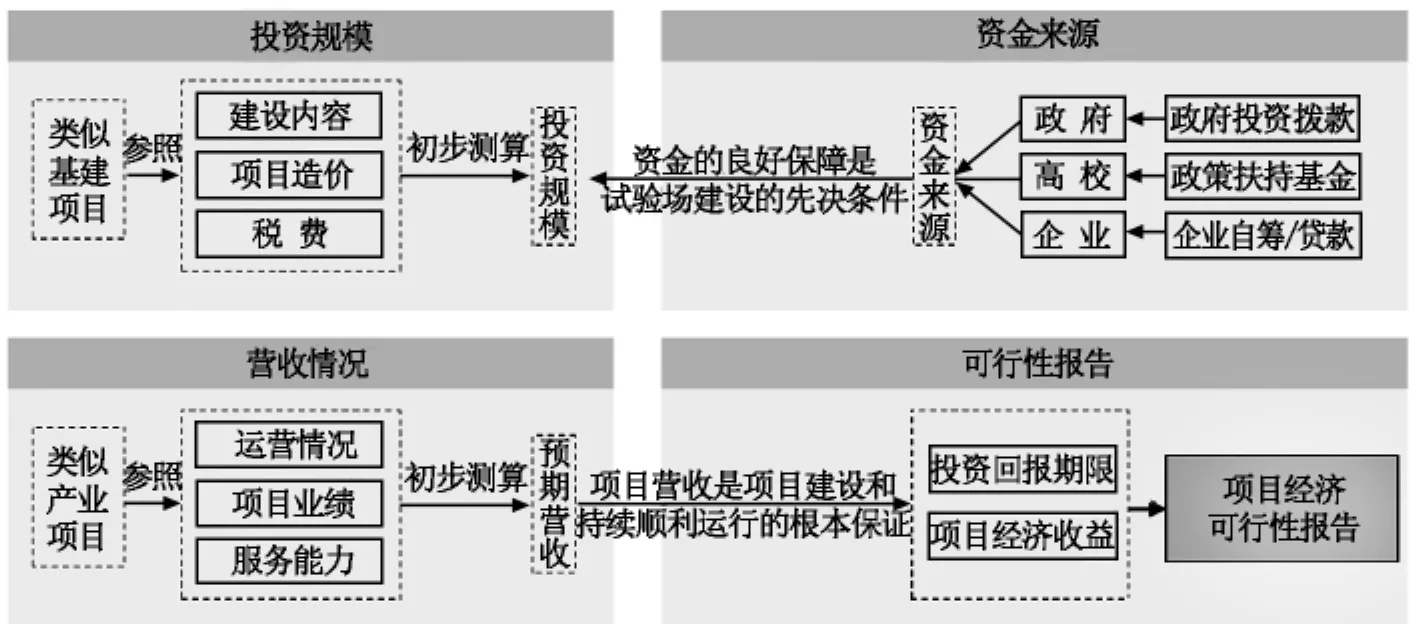
圖4 試驗場投資規模確定
基于建設內容,參照附近類似基建項目和相應工程定額,對擬建設內容和項目造價及稅費做初步估算,提出投資規模,明確資金來源與使用計劃,并根據資金計劃決定建設分期和時序。
資金的良好保障是智能網聯試驗場建設的先決條件。對應分別由政府、企業、高校或者研究機構主導建設的智能網聯試驗場,費用來源一般分為政府投資、撥款、政策扶持資金或者企業自籌、貸款等形式。
項目的營收情況是項目建設和持續順利運行的根本保證,也是項目是否立項建設的根本決定因素。通過市場和產業鏈分析,參照類似項目的運營情況、業績以及服務能力,確定項目的營收情況,計算投資回報周期,從經濟角度做項目的可行性分析,確定項目經濟收益和項目的順利落地情況。
3.1.3 場地可行性分析及項目選址
為了解決現實情況下土地資源緊張以及未來拓展考量,新建智能網聯試驗場難以合適選址的問題,本章節系統地提出了試驗場選址方案的確定方法及邏輯依據。依據確定的建設內容提出用地的場地邊界尺寸要求申請用地,落實可使用的用地范圍。回答了如何對試驗場進行可行性選址的問題。
智能網聯試驗場同傳統試驗場一樣,宜盡量選擇場地平整、豎向落差小的地塊,宜在平原開闊地區建設,同時基于試驗需求場地某一方向的長度應不少于1~2 km。但現實中往往與此矛盾,平整地塊開發早、利用條件好、土地價值高,一般很難申請到大片平整土地用于試驗場建設,即使有這樣的場地,也由于高昂的地價而影響項目經濟性,反而多是申請丘陵、山地、多溝渠的灘涂地塊作為試驗場選址。
因此需要結合場地豎向和地質情況進行選址工程適宜性、場地適宜性及經濟比選,并考慮試驗場未來拓展和發展因素,宜預留拓展與留白場地,重點考慮的因素按照重要程度應有:
a)場地四界幾何尺寸條件 場地宜有至少一個方向的長度不小于1.5 km,且寬度方向宜不小于500 m。
b)場地豎向情況 場地整體高差宜不超過5 m,且相對平整。
c)工程適宜性評價 重點考查場地地質、地表、水文、氣候、風速等因素,主要從地基處理難度和地基穩定性的建設費用,氣候、風速對測試的影響等角度進行比選[5]。
d)場地周邊市政設施情況 主要考慮公用設施如:給水、排水、供電、5G網絡、弱電光纖等的條件。
e)場地整體外部交通情況 宜選擇到達重要港口、車站、機場方便的用地,如此能夠方便客戶使用、吸引更多測試需求以及提高場地交流使用程度。
3.1.4 工藝技術設計
為了解決智能網聯試驗場工藝技術設計復雜,容易出現測試內容或測試流線規劃不合理,或者設備規劃不完整而導致場地利用率不高的問題,本章節系統地提出了試驗場工藝技術設計的方法及邏輯依據。工藝技術設計是整個智能網聯試驗場規劃設計的核心。根據功能定位,通過外部資源環境背景分析、國內外智能網聯試驗場對標分析、政策法規標準分析、特殊個性化需求梳理,綜合進行工藝技術規劃設計,回答了如何對測試場進行工藝技術設計的問題,具體可按如下階段步驟展開。
3.1.4.1 測試內容規劃
測試內容規劃根據整體定位和路試測試功能確定,按照測試車型和產品所對應的L0~L5各階段測試內容,一般劃分為基礎測試、一般測試和研發測試。
基礎測試和一般測試依據中國汽車工程學會的團體標準T/CSAE 125—2020《智能網聯汽車測試場設計技術要求》的測試內容進行規劃;研發測試重點面向L3以上智能網聯功能,需要根據產品要求和個性化測試需求進行特殊設計。
3.1.4.2 測試場景、設備規劃設計
測試場景規劃設計根據測試內容,結合場地幾何尺寸條件進行測試內容提煉、合并,從測試場地使用的角度對場地空間做出合理的整合,形成測試分區與場景固定,重點可以從高速測試區、城市測試區、鄉鎮測試區、特殊場景測試區、泊車測試區、模擬設施測試區等大類進行劃分設計。
3.1.4.3 測試流線規劃
智能網聯試驗場不僅需要考慮單項場景與內容的測試,更需要從整體試驗場的運行和使用角度做整體測試流線規劃,需要從測試路線和測試運行管理的角度盡可能地提高測試容量和測試效率,從聯絡路的設計與各場景的布置關系考慮,提高場地的利用率和不同場景間的有效銜接,達到整體最優。
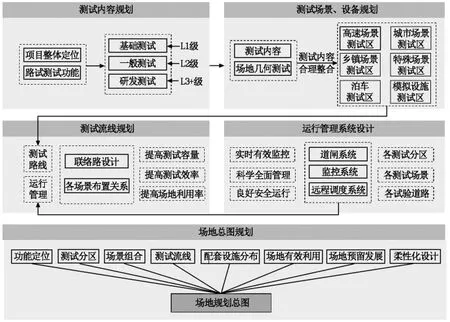
圖6 試驗場工藝技術設計
3.1.4.4 運行管理系統設計
智能網聯試驗場的良好、安全運行是試驗場生產經營的根本。
運營管理系統需要在各測試分區、各場景、各試驗道路安裝道閘和遠程調度系統,及時有效地監控場地和試驗過程,掌握測試人員的實時狀態,對測試過程和測試計劃做出科學管理。
3.1.4.5 場地總圖規劃
場地總圖規劃需要整體考慮場地的功能定位、測試分區、場景組合、測試流線、配套設施分布、場地有效利用、場地預留發展、柔性化設計場景的安排等多方面因素,根據場地條件和豎向分布進行場地規劃設計,需要重點做好測試規劃和工程規劃的有效銜接,并要滿足工程地質和工程設計規范的要求,從工程經濟性和測試效率兩方面對規劃方案進行不斷優化設計,以達到最終使用的高效安全作為規劃設計評價的第一準繩。
3.1.5 工程設計
為了明確智能網聯試驗場工程設計的流程,保障場地施工總圖的準確性與合理性,本章節系統地提出了試驗場工程設計的詳細步驟。工程設計是試驗場設計的落地階段,需要貫徹“安全、耐久、節約、和諧”的設計理念,應遵循因地制宜、就地取材的原則;結合項目的經濟、技術條件,吸取國內外智能網聯試驗場規劃和建設的先進經驗,積極采用新技術、新材料、新設備、新工藝;節約用地,重視環境保護,注意與鄰近建設工程的協調,使設計的智能網聯試驗場工程建設項目取得經濟、社會和環境的綜合效益。
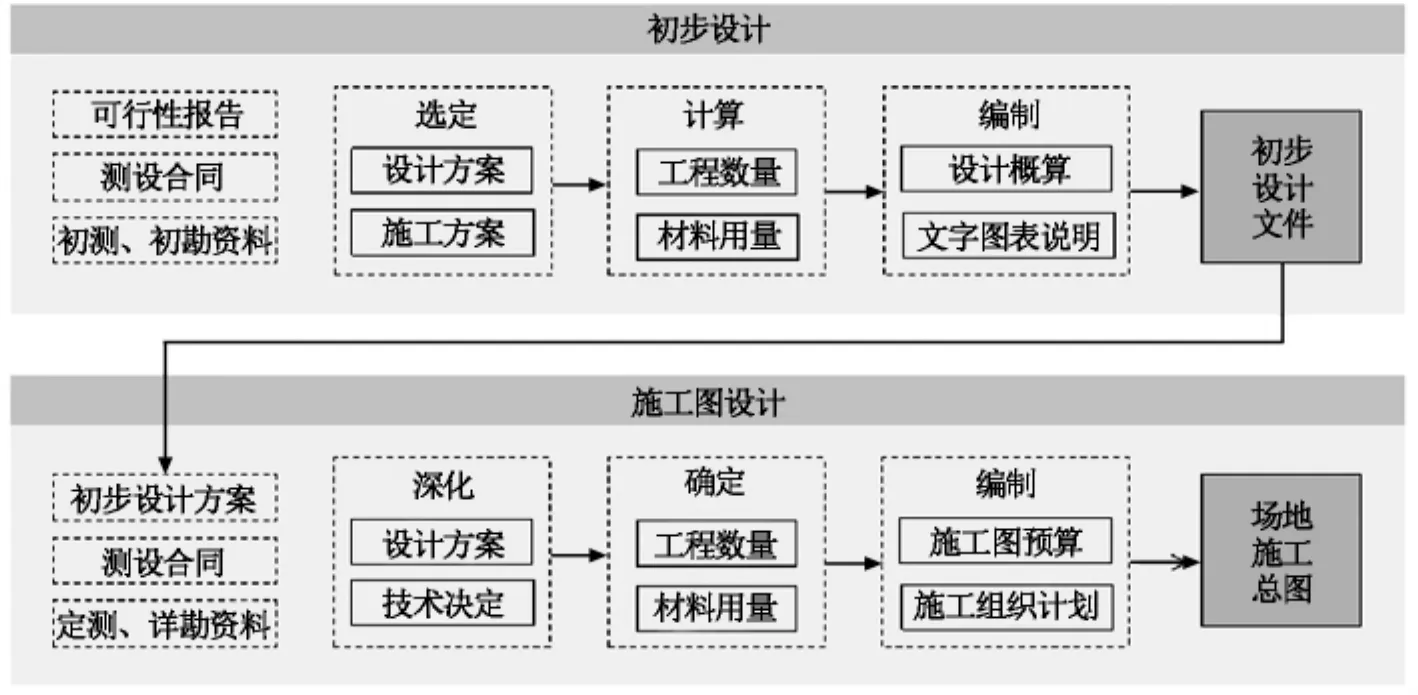
圖7 試驗場工程設計
智能網聯試驗場建設項目一般采用兩階段工程設計,即初步設計和施工圖設計。但對于技術簡單、方案明確的小型試驗場建設項目,可采用一階段設計,即一階段施工圖設計。參照《公路工程基本建設項目設計文件編制辦法(2015)》做出適用于智能網聯測試場的工程設計如下。
3.1.5.1 初步設計
初步設計應根據批復的可行性研究報告、測設合同和初測、初勘資料編制。
若為采用一階段施工圖設計則應根據批復的可行性研究報告、測設合同和定測、詳勘資料編制,并編制施工圖預算[6]。
a)目的與要求 初步設計階段的目的是基本確定設計方案。必須根據批復的可行性研究報告、測設合同的要求,擬定修建原則,選定設計方案、擬定施工方案,計算工程數量及主要材料數量,編制設計概算,提供文字說明及圖表資料。經審查批復后的初步設計文件,則為訂購主要材料、機具、設備,安排科研試驗項目,聯系征用土地、拆遷,進行施工準備,編制施工圖設計文件和控制建設項目投資等的依據。
b)組成與內容 工程設計初步設計內容及步驟參考見《公路工程基本建設項目設計文件編制辦法(2015)》第3.1.3條。設計概算應按交通部現行《公路基本建設工程概、預算編制辦法》和《公路工程概算定額》及其他相關的規定編制。
3.1.5.2 施工圖設計
施工圖設計應根據批復的初步設計、測設合同和定測、詳勘(含補充定測、詳勘)資料編制。
a)目的與要求 施工圖設計階段應根據初步設計(或技術設計)批復意見、測設合同,進一步對所審定的修建原則、設計方案、技術決定加以具體和深化,最終確定各項工程數量,提出文字說明和適應施工需要的圖表資料以及施工組織計劃,并編制施工圖預算。
一階段施工圖設計應根據可行性研究報告批復意見、測設合同的要求,擬定修建原則,確定設計方案和工程數量,提出文字說明和圖表資料以及施工組織計劃,編制施工圖預算,滿足審批的要求,適應施工的需要。
b)組成與內容 施工圖設計內容及步驟參考見《公路工程基本建設項目設計文件編制辦法(2015)》第5.1.3條。施工圖預算應按交通部現行《公路基本建設工程概算、預算編制辦法》和《公路工程預算定額》及其他相關規定編制。
4 智能網聯汽車試驗場建設
為了解決智能網聯試驗場建設過程中各部分相對獨立又互相關聯,容易出現建設內容不能有效聯動,或者建設不到位的問題,本章節系統地提出了試驗場整體建設與各部分詳細建設的內容與方法。回答了如何在設計總圖基礎上建設好各部分內容的問題。
4.1 整體建設
根據以上整體方案設計,結合國內智能網聯汽車試驗場發展建設經驗,可將智能網聯汽車試驗場建設拆分為車端、路端、云端、數據終端與通信側建設,其中車、路、數據終端分開建設,云端統一整合,通信側全面保障,最終引入平行測試理念在數字孿生平臺仿真再造云端測試場。
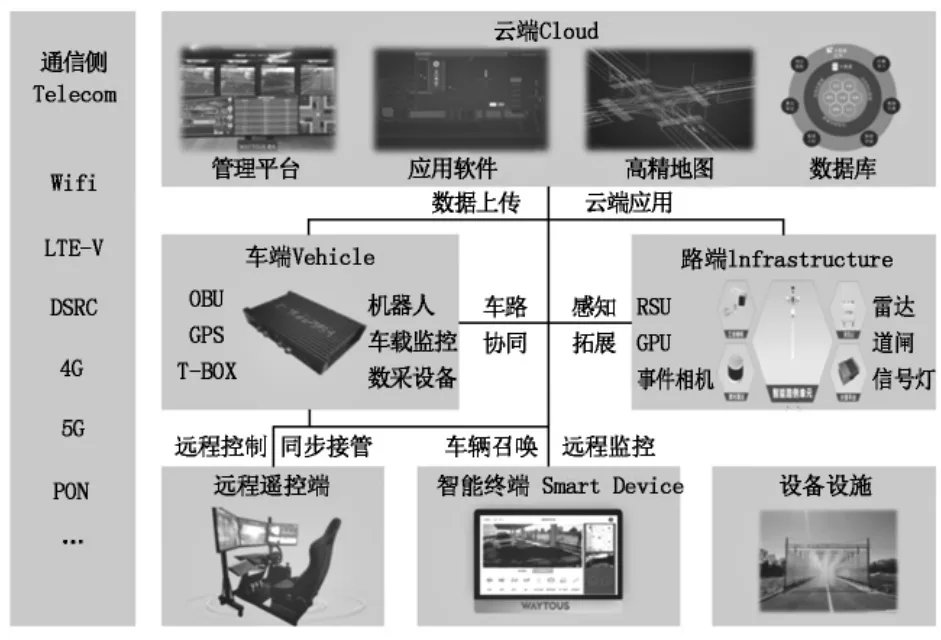
圖8 智能網聯汽車試驗場整體建設
整體建設思路為,通過試驗場內設備設施建設以場內場景來模擬實際交通場景,通過數字孿生技術以仿真場景模擬物理世界真實場景,繼而達到多層次、全方位的智能網聯測試目的。
4.2 車端建設
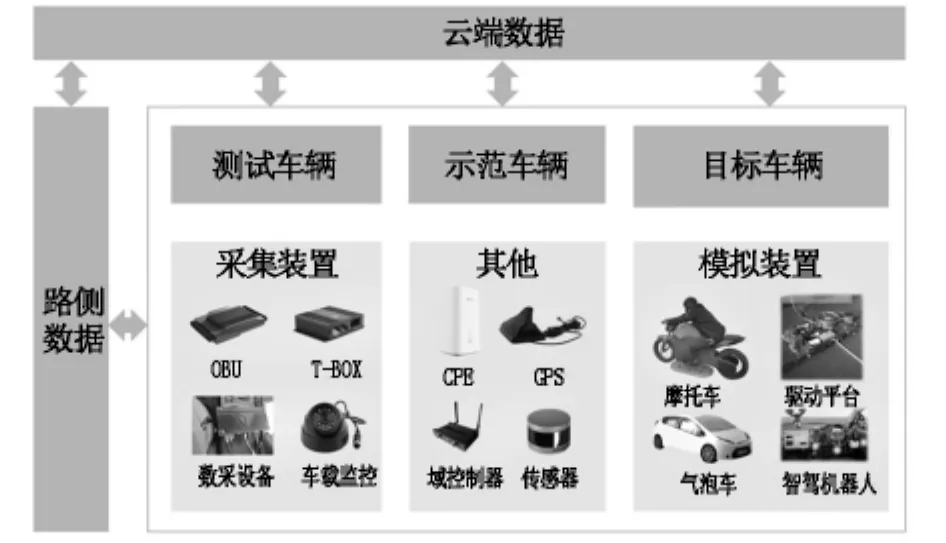
圖9 車端建設
車端建設主要包括測試車輛側建設、目標車輛側建設以及示范車輛側建設。目的是盡可能真實地模擬測試場景所要求的動靜態輔助車輛目標、盡可能充分地采集測試車輛行為與動作信息,配合車載與路側通信設備將測試數據反饋于云端平臺,實現數據閉環。
該部分主要涉及種類有負責模擬輔助車輛的模擬目標車輛(氣泡車與摩托車)、智駕機器人、自主驅動平臺,負責采集車輛數據的OBU、T-BOX、數采設備、車載監控攝像頭等,以及支持智能網聯應用的CPE、GPS、域控制器與傳感器等[7]。
4.3 路端建設
路端建設通過對路側交通設施設備進行智能化系統部署及基礎設施改造,實現對道路及交通信息的感知、處理等功能,并且通過相關的協議完成與車端、云端的信息交換。
該部分主要涉及智能網聯路側設備部分、網絡傳輸層的C-V2X部分、DSRC部分、光纖/Wifi部分,構建了以C-V2X為核心的網聯化通信與邊緣計算環境,與道路環境感知系統、自動駕駛地圖、高精度定位系統有機結合,為路側信息與車云協同提供詳細準確可靠的信息和網絡保障。
包含原有交通設施設備的智能化改造如智能信號燈、可變交通標志標識、視頻監控、交通誘導屏、智能車道控制、違章拍照等;V2X設備如路側單元、邊緣計算單元、事件檢測相機、微波雷達、激光雷達、移動紅綠燈等;以及交通模擬/輔助設備如雨霧模擬裝置、氣象監測儀、模擬路障、道閘系統、流量監測、車位監測等。
路端建設的重點內容即需要按照功能需求將測試區域劃分城市、鄉村、高速測試區,針對區域特點及匹配場景選取路側設備類型[8];再按照路口類型部署路側設備位置。目前智能網聯測試場景一般按照《合作式智能運輸系統車用通信系統應用層及應用數據交互標準》中所規定的29大類選取,圖10即為在交叉路口測試V2V/V2I場景交叉路口碰撞預警,按照測試需求需要車輛行駛數據、信號燈數據、路網數據,因而部署信號機、V2X通信單元、感知單元與邊緣計算單元。
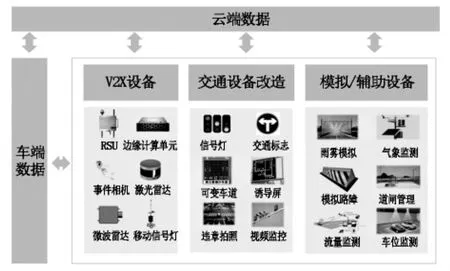
圖10 路端建設
4.4 云端建設
云端是智能網聯試驗場的“大腦”,當前智能網聯車輛功能實現與測試驗證需要引進大量分布式儀器設備,包含路側感知設備、車載單元、邊緣計算單元等等,這些散布四周的設備需要云端聚合已完成測試數據的統一分析與管理;同時依靠云的存在,使得海量的測試數據能夠得以云端存儲,方便使用者訪問;最終云端算力能夠解決平行測試的計算壓力,使得數字孿生能夠在智能網聯試驗場內實現。如在2017年中國智能車未來挑戰賽中應用的平行測試打分系統就是類似應用[9]。
云端建設是實現平行測試中物理世界與平行世界的橋梁[10],通過虛擬化或者數字孿生的方式重構出各類真實交通環境,并在仿真平臺中加入所需測試用例,真實再現自動駕駛汽車所遇道路及交通狀況,滿足大規模不同場景增強學習訓練需求。基于數字孿生構建真實的復雜交通狀況(多車、大交通流量)的測試環境,有助于解決測試資源受限、危險場景難以構建等實際問題,能夠實現在有限資源條件下的自動駕駛決策控制算法測試驗證。
云端包括機房建設以保障平臺運行基礎;數據管理平臺建設以完成對路端、車端的數據收集及實時處理分析,并且將分析結果實時下發至路端、車端,進行測試業務管理維護;平行數字孿生系統建設以搭建仿真測試場,有效利用累積智能網聯大數據進行深度挖掘,進行仿真測試與評價[11-14]。
機房建設需要遵循安全性、可靠性、標準性原則,依據GB 50174—2017《數據中心設計規范》完成基建、裝修、動力系統安裝、綜合布線、防雷接地、消防通風、防災備份、環境監控等方面。根據試驗場網絡架構設計、測試業務計算、存儲需求與UPS電力保障方案進行設備選型,為開展測試業務提供運行保障支持。
數據管理平臺分為云控系統、測試業務系統與運營系統三大系統,其中云控系統又分為V2X運行子系統、智能交通控制子系統、設備運行監控子系統、實時指揮調度子系統與數據展示子系統;測試業務系統分為數據監控子系統、測試評價子系統、仿真測試子系統與測試安全管理子系統;運營系統則包括運維保養子系統、運營分析子系統、測試資源管理子系統與出入場管理子系統。三大系統協同配合,共同支撐試驗場內測試業務正常開展。
平行數字孿生系統則是數字孿生平臺基礎上搭建仿真測試場景庫,通過虛實結合的平行測試理念進行軟件在環、硬件在環以及整車在環測試[15]。其中數字孿生平臺建設包括數據接入系統、數據交換共享系統、數據質量管控系統以及數據備份管理系統;仿真測試場景庫建設則包括數據采集系統、數據標注系統、場景生成系統與場景庫管理系統。
4.5 數據終端建設
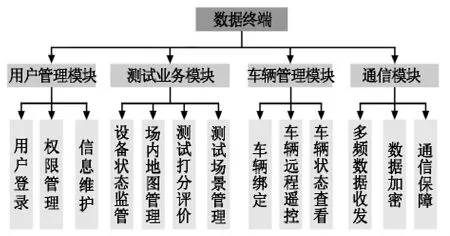
圖12 數據終端建設
數據終端是向測試管理員、操作員提供的作為測試業務管理、記錄與查看的信息化工具,是云端數據中心在移動用戶側的數據應用載體,可以提供設備狀態監管、場內地圖管理、測試打分評價、測試場景管理等測試業務管理功能,測試車輛綁定、車輛狀態查看、配合遠程遙控駕駛系統實現遠程遙控功能。
4.6 通信側建設
通信側建設一般采用層次化、模塊化的設計思路,按照接入層、傳輸層、核心層和出口層進行網絡設備設計部署,滿足試驗場內車路、車車、路路、車云、路云以及平臺開放接口低時延、高可用的組網通信需求。
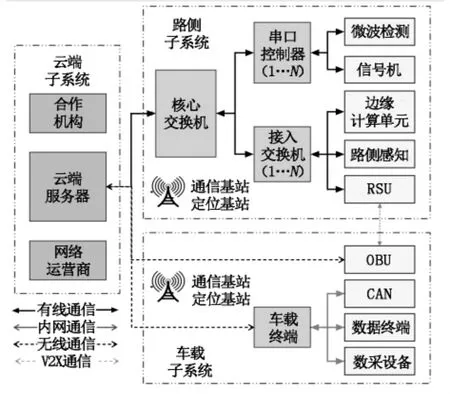
圖13 通信側建設
為保證不同設備間高覆蓋度,需要按照星型網絡組網方式對固定式視頻監控設備和智能網聯設備進行光纖組網,對移動式設備采用Wifi或4G/5G的方式連接,對車路協同設備通過LTE-V或DSRC方式實現V2I、V2V、V2P的V2X車路協同組網。
為保證整體網絡的高可靠性,交換機設備和鏈路建設需要進行冗余備份,不僅能夠增強網絡可靠性、還能降低組網復雜度,向虛擬化、扁平化方向發展。
為保證智能網聯設備通信的低延時,需要對RSU節點、路側感知節點、邊緣計算節點、智能網聯車輛進行獨立組網,建設試驗場內獨用基站,實現低時延、高可用的智能網聯專網。
5 國內智能網聯測試場的應用案例
國家智能汽車與智慧交通(京冀)示范區順義基地主要建設內容為“虛實結合,場景濃縮”。
著力打造“封閉場地+模擬仿真”的雙賽道模式,搭建有智能網聯汽車模擬仿真測試平臺,集靜態場景編輯、動態場景還原、傳感器仿真、車輛動力學仿真、關鍵場景提取、人工智能對抗樣本生成等功能于一體,可針對不同企業的需求實施定制化整體解決方案。
同時在城鎮道路、高速公路、鄉村道路、特種道路、坡道模擬以及工程配套六大功能分區建有模擬加油站、隧道、換道、鐵路等十余種附屬設置,場內部署有RSU、視頻監控系統、智能交通信號燈系統、雨霧模擬系統、道閘管理系統與5G網絡基站。

圖14 國家智能汽車與智慧交通(京冀)示范區順義基地
江西上饒汽車試驗場主要建設內容為“一平臺三前端三系統”,即為數據支撐平臺,智能交通前端、智能網聯測試前端、汽車智能化測試前端與云控系統、測試業務系統、運營系統。
圖15 江西上饒汽車試驗場
其中數據支撐平臺包括數據中心和其上的數字孿生平臺,是測試場計算和數據存儲的中心與測試場內數字化的支撐平臺。
智能交通前端包括場地中各類智能化交通設施,智能網聯測試前端包括固定的和可移動的智能網聯路側設備,汽車智能化測試前端包括環境模擬、仿真對象、移動平臺和對應的操作平臺。
云控系統負責測試場各類前端設備的控制、狀態監控和展示功能,支撐測試場景實現;測試業務系統用于實現各類測試業務、測試評價和仿真測試,同時具備測試安全管理的功能;運營系統用于測試場日常運營管理、業務預定、資源調度、運維保養。
6 結語
隨著車路協同規模的不斷壯大,其測試與試驗需求勢必愈來愈強烈,如何建設新增試驗場以及如何評估與改進現有試驗場車路協同測試能力就成為影響我國車路協同發展的重要問題,研究者希望能夠通過既往經驗的思考與設計建設方法的總結助力行業探索出新的發展道路,不僅可以解決當前試驗場建設標準不一、盈利困難、測試協同性差的問題,也希望能夠推進相關標準的制定與實施,最終實現中國的車路協同汽車在中國的車路協同試驗場中安全可靠地駛出,駛在中國的道路上。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國外匯(2019年18期)2019-11-25 01:41:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年14期)2018-08-21 01:38:28
人大建設(2017年10期)2018-01-23 03:10:17
民生周刊(2017年19期)2017-10-25 10:29:03
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中央社會主義學院學報(2013年1期)2013-03-01 04:17:32
