海洋核動(dòng)力平臺(tái)定位系統(tǒng)多體動(dòng)力學(xué)建模與分析1)
2022-06-16 05:50:14郭沖沖武文華吳國(guó)東曹光明呂柏呈
力學(xué)學(xué)報(bào) 2022年5期
關(guān)鍵詞:模型
郭沖沖 * 武文華 *, 吳國(guó)東 ** 曹光明 ** 呂柏呈
* (大連理工大學(xué)工業(yè)裝備與結(jié)構(gòu)分析國(guó)家重點(diǎn)實(shí)驗(yàn)室,遼寧大連 116024)
? (大連理工大學(xué)深圳研究院,廣東深圳 518057)
** (武漢第二船舶設(shè)計(jì)研究所,武漢 430064)
?? (中國(guó)海洋石油有限公司研究總院,北京 100028)
引言
海洋核動(dòng)力平臺(tái)(見(jiàn)圖1),是小型核反應(yīng)堆與船舶工程有機(jī)結(jié)合而成的海上移動(dòng)式核電站[1],主要為海洋石油開(kāi)采、偏遠(yuǎn)島嶼和海水淡化供應(yīng)能源,具有安全系數(shù)高和對(duì)海洋環(huán)境危害小等優(yōu)點(diǎn),被認(rèn)為是海上能源供給最理想的方式[2].海洋核動(dòng)力平臺(tái)采用定位系統(tǒng)實(shí)現(xiàn)對(duì)平臺(tái)的系泊定位.由于國(guó)內(nèi)海工領(lǐng)域的定位系統(tǒng)沒(méi)有浮式核動(dòng)力平臺(tái)的工程應(yīng)用案例,現(xiàn)有定位系統(tǒng)的安全保障措施主要針對(duì)FPSO,因此開(kāi)展針對(duì)海洋核動(dòng)力平臺(tái)定位系統(tǒng)的安全性能研究具有重要工程價(jià)值.

圖1 海洋核動(dòng)力平臺(tái)Fig.1 Marine nuclear power platform
近年來(lái),許多國(guó)家對(duì)海洋核動(dòng)力平臺(tái)進(jìn)行了大量的設(shè)計(jì)和研究[3-5].如美國(guó)的OFNP-300/OPNP1100、俄羅斯的KLT-40/RITM-200 和法國(guó)的Flexblue[6]等.在中國(guó),一些研究機(jī)構(gòu)正在專(zhuān)注于海洋核動(dòng)力平臺(tái)的小型核反應(yīng)堆設(shè)計(jì),包括中核集團(tuán)基于ACP100[7]設(shè)計(jì)的310 MWt ACP100 S 和中廣核設(shè)計(jì)的200 MWt ACPR50 S.中船重工719 研究所則專(zhuān)注于系泊與船體的設(shè)計(jì).針對(duì)海洋核動(dòng)力平臺(tái)定位系統(tǒng)的安全問(wèn)題,國(guó)內(nèi)外學(xué)者所開(kāi)展的數(shù)值計(jì)算研究仍較為初步.章紅雨等[8]采用數(shù)值方法對(duì)海洋核動(dòng)力平臺(tái)的耐波性進(jìn)行了計(jì)算.梁雙令等[9]采用頻域數(shù)值方法研究了海洋核動(dòng)力平臺(tái)在不同波浪譜下的低頻響應(yīng).端木晚露等[10]分析了海洋核動(dòng)力平臺(tái)的波浪載荷特性,采用設(shè)計(jì)波法對(duì)全船結(jié)構(gòu)進(jìn)行強(qiáng)度校核.另一方面,由于定位系統(tǒng)與油氣平臺(tái)的水上軟剛臂系泊系統(tǒng)具有高度相似性,包括結(jié)構(gòu)形式和功能原理,一些學(xué)者對(duì)其運(yùn)動(dòng)形式和受力傳遞進(jìn)行了研究.范模[11]介紹了軟剛臂單點(diǎn)系泊系統(tǒng)的工作原理,采用靜力學(xué)分析了系泊系統(tǒng)結(jié)構(gòu)特性.Sun 等[12]利用二維簡(jiǎn)化方法,推導(dǎo)了軟剛臂系泊系統(tǒng)的動(dòng)力學(xué)剛度,建立了系泊系統(tǒng)時(shí)域分析模型.李欣等[13]建立了軟剛臂單點(diǎn)系統(tǒng)的Kane 動(dòng)力方程,并與模型試驗(yàn)系泊力的對(duì)比結(jié)果吻合.Wu 等[14]基于Kane 動(dòng)力學(xué)方法開(kāi)發(fā)了渤海某FPSO 的系泊回復(fù)力監(jiān)測(cè)系統(tǒng),實(shí)現(xiàn)了對(duì)軟剛臂單點(diǎn)系泊系統(tǒng)安全評(píng)估的工程應(yīng)用.
海洋平臺(tái)中存在大量多剛體系統(tǒng),開(kāi)展多體動(dòng)力學(xué)分析能夠?yàn)槠湫阅茉u(píng)估和安全設(shè)計(jì)提供理論支撐.文獻(xiàn)[15]利用多體動(dòng)力學(xué)方法,對(duì)波浪發(fā)電設(shè)備開(kāi)展了建模和動(dòng)力學(xué)仿真.文獻(xiàn)[16]將水上起重機(jī)作為多體動(dòng)力學(xué)模型,討論了流固相互作用的方法模型.Ha 等[17]設(shè)計(jì)了一種多體系統(tǒng)動(dòng)力學(xué)仿真方法,對(duì)船舶和近海結(jié)構(gòu)的建造和運(yùn)輸過(guò)程進(jìn)行了模擬.Atipovic 等[18]基于線性化多體動(dòng)力學(xué)方法,計(jì)算了水上浮式起重機(jī)的固有頻率.文獻(xiàn)[19]基于多體技術(shù),研究了起重船的負(fù)載擺動(dòng)問(wèn)題.Rong[20]對(duì)近年來(lái)的動(dòng)力學(xué)建模方法、計(jì)算策略、控制設(shè)計(jì)、軟件開(kāi)發(fā)以及多體系統(tǒng)實(shí)驗(yàn)進(jìn)行了研究,并指出了該領(lǐng)域未來(lái)的研究方向.Rui[21]提出了一種新的多體動(dòng)力學(xué)方法,并給出了該方法的公式以及一些多剛體系統(tǒng)動(dòng)力學(xué)的算例,驗(yàn)證了該方法合理性.一些學(xué)者將多體動(dòng)力學(xué)引入到FPSO 的系泊系統(tǒng)進(jìn)行研究.Wang 等[22]將多體動(dòng)力學(xué)仿真方法應(yīng)用到FPSO 軟剛臂系泊系統(tǒng)的耦合動(dòng)力分析中.Lü等[23]提出了一種適用于FPSO 系泊系統(tǒng)多體動(dòng)力學(xué)模型,并基于長(zhǎng)期的監(jiān)測(cè)數(shù)據(jù)對(duì)在役系泊系統(tǒng)進(jìn)行了易損性評(píng)估.金鋒等[24]基于軟剛臂系泊系統(tǒng)的多體動(dòng)力學(xué)模型,開(kāi)發(fā)了祖沖之類(lèi)方法的保辛數(shù)值積分算法,對(duì)于非線性系統(tǒng)具有較高的求解精度.但海洋核動(dòng)力平臺(tái)與FPSO 在結(jié)構(gòu)和水動(dòng)力學(xué)等方面存在一定差異.主要體現(xiàn)在海洋核動(dòng)力平臺(tái)搭載核動(dòng)力裝置,須要保證核安全要求[25];核動(dòng)力平臺(tái)需要滿足500年一遇海洋條件,使用條件更加苛刻等.因此海洋核動(dòng)力平臺(tái)的設(shè)計(jì)重現(xiàn)期比同樣采用單點(diǎn)系泊型式的FPSO 高.海洋核動(dòng)力平臺(tái)的船長(zhǎng)船寬比L/B明顯小于FPSO,因此其縱向扭矩表現(xiàn)比較突出,更容易出現(xiàn)彎扭耦合,在斜浪下其總縱載荷(縱垂彎矩、縱垂剪力)更危險(xiǎn)為突出.由于船型差異,核動(dòng)力平臺(tái)與FPSO 水動(dòng)力學(xué)性能不同,表現(xiàn)在響應(yīng)幅值算子RAO 的幅值和峰值頻率不同.所以針對(duì)海洋核動(dòng)力平臺(tái)的研究需要考慮兩者的差異.同時(shí)關(guān)于核動(dòng)力平臺(tái)在設(shè)計(jì)海況下浮體運(yùn)動(dòng)時(shí)程構(gòu)造、多體動(dòng)力學(xué)模型分析以及系泊剛度特性等方面,還需要進(jìn)一步研究.
本工作針對(duì)海洋核動(dòng)力平臺(tái)定位系統(tǒng)的多體動(dòng)力特性開(kāi)展分析,運(yùn)用多剛體動(dòng)力學(xué)理論,結(jié)合定位系統(tǒng)多鉸連接的拓?fù)浣Y(jié)構(gòu),建立定位系統(tǒng)的多體動(dòng)力學(xué)控制方程.同時(shí),考慮渤海多年一遇的設(shè)計(jì)環(huán)境條件,通過(guò)譜分析與線性疊加原理相結(jié)合的方法得到核動(dòng)力平臺(tái)六自由度運(yùn)動(dòng)時(shí)程.在此基礎(chǔ)上,對(duì)設(shè)計(jì)海況下定位系統(tǒng)的多體動(dòng)力特性開(kāi)展評(píng)估,并與傳統(tǒng)的準(zhǔn)靜力學(xué)模型和Kane 動(dòng)力學(xué)模型進(jìn)行對(duì)比分析.研究結(jié)果表明,本工作所開(kāi)展的定位系統(tǒng)多體動(dòng)力學(xué)計(jì)算可獲得動(dòng)力特性顯著的系泊回復(fù)力與連接結(jié)構(gòu)受力.本工作計(jì)算的動(dòng)剛度曲線和提出的系泊回復(fù)力動(dòng)力放大系數(shù),可以為定位系統(tǒng)的工程設(shè)計(jì)和系泊能力評(píng)估提供輔助,具有較為重要的工程價(jià)值.
1 定位系統(tǒng)多體動(dòng)力學(xué)模型
1.1 結(jié)構(gòu)形式與模型化
海洋核動(dòng)力平臺(tái)通常依靠定位系統(tǒng)作為系泊裝置保證其在某一固定區(qū)域作業(yè).定位系統(tǒng)依賴(lài)于水上多鉸連接方式,釋放轉(zhuǎn)動(dòng)自由度,實(shí)現(xiàn)核動(dòng)力平臺(tái)的風(fēng)向標(biāo)效應(yīng),使得平臺(tái)船體在風(fēng)、浪、流等外界環(huán)境載荷聯(lián)合作用下,位于合力最小的位置上.并通過(guò)壓載水艙重力提供縱向回復(fù)力.
定位系統(tǒng)包括單點(diǎn)轉(zhuǎn)塔,YOKE,左系泊腿,右系泊腿以及系泊支架.系泊支架與核電船固接.圖2 為定位系統(tǒng)及其拓?fù)浣Y(jié)構(gòu)圖.其中B0為單點(diǎn)轉(zhuǎn)塔,B1為YOKE 剛臂,B2為左系泊腿,B3為右系泊腿,B4為系泊支架.

圖2 定位系統(tǒng)動(dòng)力學(xué)分析拓?fù)浣Y(jié)構(gòu)圖Fig.2 Topology view of positioning system for dynamic analysis
定位系統(tǒng)由13 個(gè)鉸節(jié)點(diǎn)連接.單點(diǎn)轉(zhuǎn)塔與YOKE 連接處,由一個(gè)回轉(zhuǎn)支承H12,一個(gè)旋轉(zhuǎn)鉸H11和一個(gè)滑環(huán)H13組成,釋放了YOKE 繞轉(zhuǎn)塔橫搖、縱搖及艏搖自由度,限制了YOKE 橫蕩、縱蕩及垂蕩運(yùn)動(dòng).多體動(dòng)力學(xué)建模中將三個(gè)鉸節(jié)點(diǎn)合并,其模型化為球鉸,如圖3 所示 .
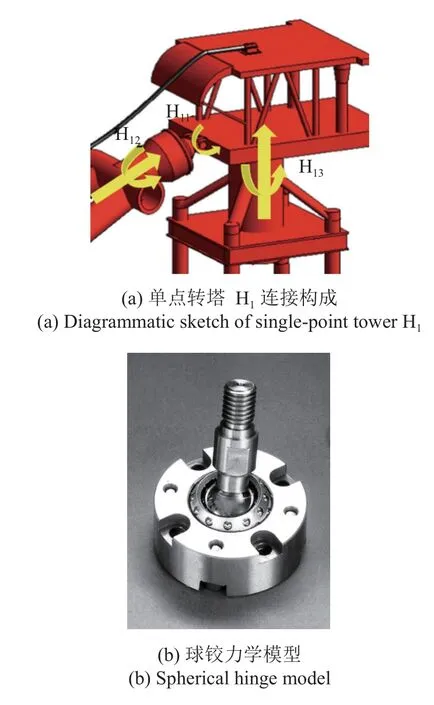
圖3 單點(diǎn)轉(zhuǎn)塔鉸節(jié)點(diǎn)力學(xué)簡(jiǎn)化模型Fig.3 Mechanical model of the hinge joint in the single-point tower
兩根系泊腿分別連接YOKE 和系泊支架.系泊腿下部鉸節(jié)點(diǎn)由兩個(gè)旋轉(zhuǎn)鉸組成,僅釋放系泊腿橫搖、縱搖的旋轉(zhuǎn)自由度.在建模中系泊腿下鉸節(jié)點(diǎn)分別模型化為胡克鉸H2和H3,圖4(a).系泊腿上鉸節(jié)點(diǎn)由兩個(gè)旋轉(zhuǎn)鉸H41,H42和一個(gè)止推軸承H43組成,釋放系泊腿橫、縱搖和軸向轉(zhuǎn)動(dòng),兩鉸節(jié)點(diǎn)尺寸遠(yuǎn)小于系泊腿長(zhǎng)度,在建模過(guò)程中將其模擬為球鉸結(jié)構(gòu),圖4(d).右系泊腿上鉸節(jié)點(diǎn)為球鉸H4,左系泊腿上鉸節(jié)點(diǎn)為球鉸H5.表1 給出了定位系統(tǒng)多體動(dòng)力學(xué)模型各單體及各鉸節(jié)點(diǎn)連接方式.


圖4 系泊腿上下節(jié)點(diǎn)力學(xué)簡(jiǎn)化模型Fig.4 Mechanical model of hinge joints on mooring legs

表1 定位系統(tǒng)各單體及鉸接方式Table 1 Connection types of positioning system hinge structure
1.2 多剛體動(dòng)力學(xué)模型
定位系統(tǒng)為典型的有根非樹(shù)多體系統(tǒng),而且為閉環(huán)多體系統(tǒng).建模過(guò)程中,選擇左系泊腿上鉸節(jié)點(diǎn)H5進(jìn)行切斷,得到由5 個(gè)剛體,4 個(gè)鉸組成的定位系統(tǒng)派生樹(shù)系統(tǒng).
定位系統(tǒng)在相對(duì)坐標(biāo)方法下的廣義坐標(biāo)向量為

式中,YOKE與單點(diǎn)連接鉸的轉(zhuǎn)動(dòng)角度為(q11,q12,q13),左、右系泊腿下鉸節(jié)點(diǎn)的轉(zhuǎn)動(dòng)角度分別為 (q21,q22) 和 (q31,q32),右系泊腿上鉸節(jié)點(diǎn)的轉(zhuǎn)動(dòng)角度為 (q41,q42,q43) .
定位系統(tǒng)中YOKE、左系泊腿、右系泊腿和系泊支架等各單體的隨體坐標(biāo)系分別對(duì)應(yīng)

各鉸節(jié)點(diǎn)轉(zhuǎn)軸矢量為



式中,g1,g2,g3為大地坐標(biāo)系基矢量.
定位系統(tǒng)各單體的質(zhì)心位置和體鉸矢量如圖5所示,各單體質(zhì)心位置表示為oi(i=0~ 4),物體i到物體j的體鉸矢量表示為Cij(i=1~ 4,j=0~ 4).式(6)為各單體的質(zhì)心位置矢量
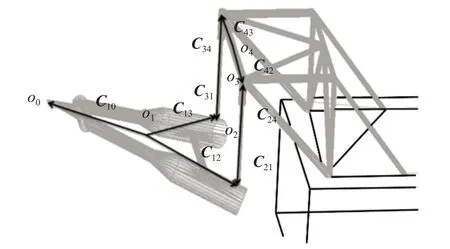
圖5 定位系統(tǒng)體鉸矢量Fig.5 Body-hinge vector of the positioning system
本文選取左系泊腿上鉸節(jié)點(diǎn)H5作為切斷鉸,則與鉸H5相連接的系泊腿和系泊支架相對(duì)位移為h5=r4+C42-r2-C24,為球鉸H5相對(duì)位移的二階相對(duì)變化率[26],可得定位系統(tǒng)相對(duì)加速度約束方程
式(7)可以改寫(xiě)成約束雅克比矩陣形式為

式中,Φ5為約束雅克比矩陣,t5為由廣義速率引起的加速度.
由虛功原理可以得到定位系統(tǒng)的多體動(dòng)力學(xué)方程為
式中,M為12×12 定位系統(tǒng)廣義質(zhì)量矩陣,F為系統(tǒng)的廣義外力向量,λ 為拉格朗日乘子列向量.根據(jù)拉格朗日乘子的物理意義,λ =(F51,F52,F53)T為左系泊腿上鉸節(jié)點(diǎn)的約束反力.由式(9)計(jì)算得到廣義加速度計(jì)算公式為

為了便于核動(dòng)力平臺(tái)船體的運(yùn)動(dòng)信息輸入到定位系統(tǒng)的多體動(dòng)力學(xué)模型,建立定位系統(tǒng)多體動(dòng)力學(xué)廣義坐標(biāo)向量與六自由度運(yùn)動(dòng)信息關(guān)系.通過(guò)式(11)求解定位系統(tǒng)切斷鉸方程廣義坐標(biāo)向量Q和廣義坐標(biāo)速度向量

式(11)的第1~ 6 個(gè)等式為核動(dòng)力平臺(tái)船體的三個(gè)平動(dòng)自由度和三個(gè)轉(zhuǎn)動(dòng)自由度方程,第7 個(gè)等
式為左系泊腿的橫擺,第8~ 10 個(gè)等式為定位系統(tǒng)切斷鉸位置約束方程,各等式間相互獨(dú)立.式(11)中xSway,ySurge,zHeave為核動(dòng)力平臺(tái)船體的橫蕩、縱蕩和垂蕩,αRoll,βPitch,γYaw為核動(dòng)力平臺(tái)船體的橫搖、縱搖和艏搖,χRLEG為左系泊腿的相對(duì)橫擺角度(一般依靠實(shí)測(cè)數(shù)據(jù),文中給定初始默認(rèn)值),,分別為核動(dòng)力平臺(tái)船體的隨體坐標(biāo)系基矢量在水平面的投影矢量.
因此,首先輸入核動(dòng)力平臺(tái)六自由度信息,換算得到多體動(dòng)力學(xué)系統(tǒng)廣義坐標(biāo)向量,對(duì)其進(jìn)行一階和二階求導(dǎo)分別得到廣義角速度和廣義角加速度;其次,基于角速度疊加定理得到角速度,結(jié)合廣義角速度和廣義角加速度對(duì)角速度求導(dǎo)得到角加速度;然后,對(duì)質(zhì)心的位置矢量求導(dǎo)結(jié)合角速度和角加速度可求得速度和加速度;最后代入到多體動(dòng)力學(xué)方程(動(dòng)力學(xué)方程和切斷鉸約束方程),得到切斷鉸約束反力,進(jìn)而遞推計(jì)算其他鉸節(jié)點(diǎn)受力信息.具體的計(jì)算流程如圖6 所示,采用MATLAB 軟件編寫(xiě)計(jì)算程序.

圖6 計(jì)算流程圖Fig.6 Computing process
2 基于線性疊加原理的船體六自由度時(shí)程
為了驗(yàn)證定位系統(tǒng)多體動(dòng)力學(xué)模型的正確性,選擇設(shè)計(jì)海況下核動(dòng)力平臺(tái)的六自由度信息進(jìn)行分析.所以本節(jié)利用JONSWAP 譜與線性疊加原理相結(jié)合的方法,計(jì)算海洋核動(dòng)力平臺(tái)在設(shè)計(jì)海況下的六自由度響應(yīng)時(shí)程,進(jìn)而對(duì)定位系統(tǒng)進(jìn)行多體動(dòng)力學(xué)計(jì)算.
2.1 六自由度響應(yīng)譜
由于海浪是隨機(jī)的、不規(guī)則的,在實(shí)際工程分析中常使用波浪譜對(duì)不規(guī)則波進(jìn)行描述.因此選擇適合海洋核動(dòng)力平臺(tái)設(shè)計(jì)作業(yè)區(qū)域的波浪譜計(jì)算不規(guī)則海況,工程上常用的波浪譜有JONSWAP 譜、P-M 譜等[27].本文采用JONSWAP 譜為計(jì)算目標(biāo)譜,以某極端海況參數(shù)為例(表2),擬合得到海洋核動(dòng)力平臺(tái)設(shè)計(jì)作業(yè)海域的JONSWAP 波浪譜值如圖7 所示.

圖7 JONSWAP 波浪譜Fig.7 JONSWAP wave spectrum

表2 某極端海況設(shè)計(jì)環(huán)境條件Table 2 Design environmental conditions of an extreme sea state
基于三維輻射繞射理論,計(jì)算海洋核動(dòng)力平臺(tái)在單位波幅規(guī)則波上的響應(yīng),從而得到對(duì)應(yīng)一系列頻率規(guī)則波的船體六自由度響應(yīng)傳遞函數(shù)[28],即響應(yīng)幅值算子RAO.由于海洋核動(dòng)力平臺(tái)的系泊特性,單點(diǎn)轉(zhuǎn)塔使得船體始終處于迎浪狀態(tài).本文通過(guò)商業(yè)水動(dòng)力軟件AQWA 計(jì)算得到海洋核動(dòng)力平臺(tái)在浪向角180°下的響應(yīng)幅值算子,圖8 為海洋核動(dòng)力平臺(tái)在迎浪條件下的六自由度RAO

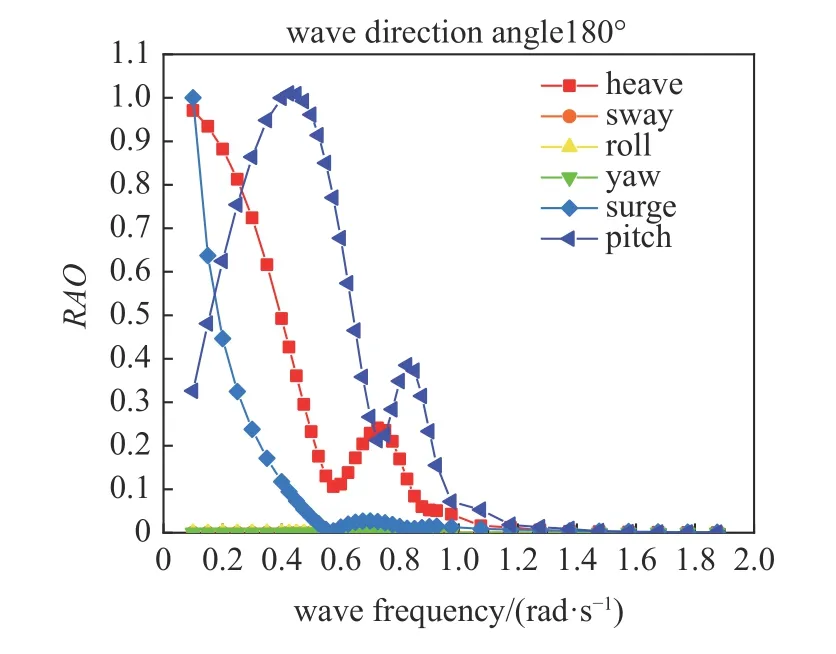
圖8 海洋核動(dòng)力平臺(tái)6 自由度RAOFig.8 6-DOF RAO of nuclear power platform
式中,Am(ω) 為某波浪頻率下核動(dòng)力平臺(tái)的六自由度運(yùn)動(dòng)幅值,Aw(ω) 為某波浪頻率下的單位規(guī)則波幅值.
海洋核動(dòng)力平臺(tái)的六自由度響應(yīng)譜是將響應(yīng)幅值算子RAO(式(12))和波浪能量譜SW(ω) 通過(guò)譜分析方法計(jì)算而得到[29]

式中,SR(ω) 為海洋核動(dòng)力平臺(tái)六自由度運(yùn)動(dòng)響應(yīng)譜.
2.2 六自由度時(shí)程
一些學(xué)者[30]把線性疊加原理引進(jìn)到船舶的搖蕩運(yùn)動(dòng)研究中來(lái).將海浪(不規(guī)則波)看做一平穩(wěn)隨機(jī)過(guò)程,由許許多多波長(zhǎng)、波高、頻率或周期不同的正弦或余弦規(guī)則波疊加而成.因此海洋核動(dòng)力平臺(tái)對(duì)不規(guī)則波的響應(yīng)等于構(gòu)成不規(guī)則波的各成分波單獨(dú)響應(yīng)之和,這樣通過(guò)線性疊加得到總的響應(yīng)

式中,j=1~ 6,分別代表6 個(gè)自由度分量:垂蕩、橫蕩、縱蕩、艏搖、橫搖和縱搖;ηj(t)為第j個(gè)分量在t時(shí)刻的M個(gè)響應(yīng)的瞬時(shí)幅值總和;為第i個(gè)成分響應(yīng)的振幅; ωi為第i個(gè)成分響應(yīng)的圓頻率;εi為第i個(gè)成分響應(yīng)的初相位,一般取(0,2π)范圍內(nèi)均布的隨機(jī)數(shù).
設(shè)定模擬的靶譜(海洋核動(dòng)力平臺(tái)響應(yīng)譜)SR(ω) 的能量絕大部分分布在 ωL~ωH范圍內(nèi),其余部分可以忽略不計(jì),把頻率范圍劃分成M個(gè)區(qū)間,其間距 Δ ω=(ωH-ωL)/M,取
式中,Δ ωi為第i個(gè)頻率區(qū)間;為第i個(gè)區(qū)間內(nèi)圓頻率的中值.
將代表M個(gè)區(qū)間內(nèi)的M個(gè)余弦響應(yīng)疊加起來(lái),即可得到核動(dòng)力平臺(tái)六自由度運(yùn)動(dòng)時(shí)程

3 算例分析和結(jié)果討論
3.1 多體動(dòng)力學(xué)模型參數(shù)
基于核動(dòng)力平臺(tái)定位系統(tǒng)的結(jié)構(gòu)參數(shù),可得到表征定位系統(tǒng)多體動(dòng)力特性的控制方程.平臺(tái)主要參數(shù)如表3 所示.定位系統(tǒng)各單體的質(zhì)量、質(zhì)心位置以及轉(zhuǎn)動(dòng)慣量等參數(shù)信息見(jiàn)表4.
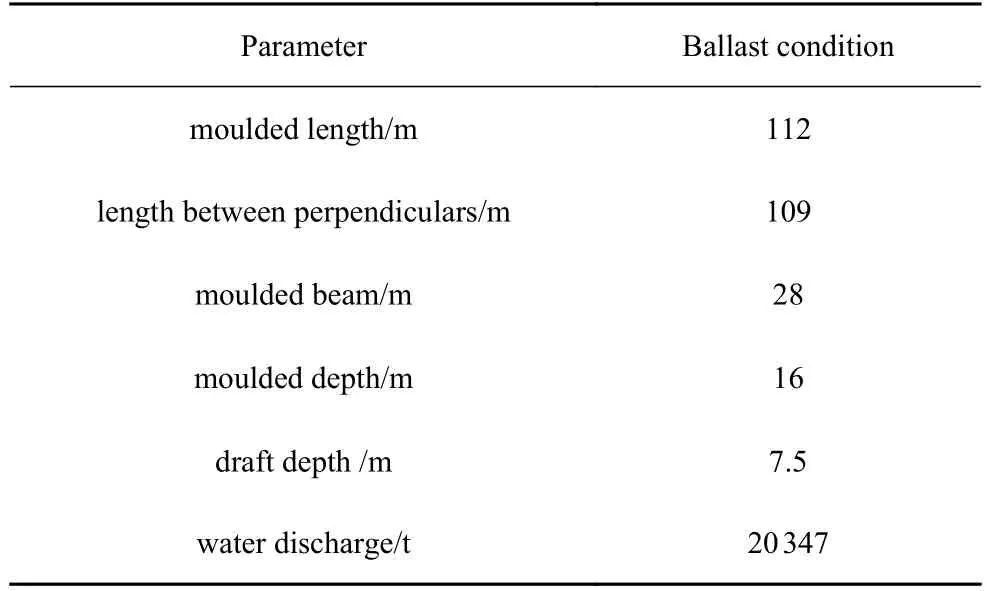
表3 海洋核動(dòng)力平臺(tái)主要參數(shù)Table 3 Major parameters of nuclear power platform

表4 定位系統(tǒng)主要參數(shù)Table 4 Major parameters of the positioning system
3.2 渤海設(shè)計(jì)環(huán)境條件
海洋核動(dòng)力平臺(tái)設(shè)計(jì)作業(yè)區(qū)域渤海(海域水深20 m 左右)的設(shè)計(jì)環(huán)境參數(shù)[31]如表5 所示.

表5 渤海設(shè)計(jì)環(huán)境條件Table 5 Design environmental conditions of Bohai Sea
現(xiàn)以表5 渤海設(shè)計(jì)環(huán)境條件參數(shù),擬合得到JONSWAP 波浪譜值如圖9 所示.
從圖9 可以看出,波浪是窄帶隨機(jī)過(guò)程,在JONSWAP 波浪譜中頻率很小和頻率很大的組成波提供能量很小,能量主要由一狹窄頻率帶內(nèi)的組成波提供.同時(shí),JONSWAP 波浪譜的能量隨著海況重現(xiàn)期標(biāo)準(zhǔn)的提高而顯著增大.

圖9 多年一遇重現(xiàn)期擬合的JONSWAP 波浪譜Fig.9 JONSWAP wave spectrum with multi-year return period
3.3 結(jié)果分析
3.3.1 系泊回復(fù)力與動(dòng)力放大系數(shù)
根據(jù)定位系統(tǒng)多剛體動(dòng)力學(xué)模型,結(jié)合設(shè)計(jì)環(huán)境下核動(dòng)力平臺(tái)響應(yīng)時(shí)程,對(duì)定位系統(tǒng)的受力行為進(jìn)行分析.計(jì)算一年一遇、十年一遇和百年一遇海況下,海洋核動(dòng)力平臺(tái)定位系統(tǒng)在不同力學(xué)模型下的水平系泊回復(fù)力(兩根系泊上鉸節(jié)點(diǎn)沿水平方向的合力),計(jì)算結(jié)果如圖10~ 圖12.圖13 為不同重現(xiàn)期海況下不同力學(xué)模型計(jì)算得到的水平系泊回復(fù)力均值對(duì)比.

圖10 一年一遇水平系泊回復(fù)力Fig.10 Mooring restoring force of 1-year return period

圖11 十年一遇水平系泊回復(fù)力Fig.11 Mooring restoring force of 10-year return period

圖12 百年一遇水平系泊回復(fù)力Fig.12 Mooring restoring force of 100-year return period

圖13 不同重現(xiàn)期海況水平系泊回復(fù)力均值對(duì)比Fig.13 Comparison of mean values of mooring restoring force in different multi-year return periods
由圖10~ 圖12 可以看出,在同一海況重現(xiàn)期下,Kane 動(dòng)力學(xué)模型相較于準(zhǔn)靜力學(xué)模型的計(jì)算結(jié)果具有明顯的動(dòng)力效果,多體動(dòng)力學(xué)模型相較于Kane 動(dòng)力學(xué)模型的計(jì)算結(jié)果具有顯著的動(dòng)力效果,說(shuō)明了在定位系統(tǒng)力學(xué)建模中考慮三維拓?fù)淇臻g的必要性;同時(shí),準(zhǔn)靜力學(xué)模型與Kane 動(dòng)力學(xué)模型計(jì)算幅值的數(shù)量級(jí)為105N,而多體動(dòng)力學(xué)模型計(jì)算幅值的數(shù)量級(jí)為106N,說(shuō)明在極端海洋環(huán)境下準(zhǔn)靜力學(xué)模型和Kane 動(dòng)力學(xué)模型計(jì)算得到的結(jié)果偏小,無(wú)法反應(yīng)定位系統(tǒng)的真實(shí)動(dòng)力響應(yīng),對(duì)于海洋核動(dòng)力平臺(tái)的工程設(shè)計(jì)而言偏于風(fēng)險(xiǎn).在不同海況重現(xiàn)期下,隨著標(biāo)準(zhǔn)期的提高,定位系統(tǒng)的水平系泊回復(fù)力顯著增加,從一年一遇的1.1 MN 增大到百年一遇的4.0 MN,因此須重視對(duì)高重現(xiàn)期海況下定位系統(tǒng)系泊結(jié)構(gòu)的安全校核.
由圖13 可以看出,多體動(dòng)力學(xué)模型計(jì)算結(jié)果隨著重現(xiàn)期標(biāo)準(zhǔn)越高而增大,真實(shí)的海況輸入與準(zhǔn)確的定位系統(tǒng)力學(xué)模型對(duì)于計(jì)算結(jié)果都至關(guān)重要,本文所建立的多剛體動(dòng)力學(xué)模型能夠準(zhǔn)確描述定位系統(tǒng)的受力行為.
將動(dòng)力學(xué)模型計(jì)算的水平系泊回復(fù)力最大值與靜力學(xué)模型計(jì)算的水平系泊回復(fù)力最大值的比值定義為反映定位系統(tǒng)動(dòng)力特性的動(dòng)力放大系數(shù).計(jì)算不同的海況重現(xiàn)期下Kane 動(dòng)力學(xué)模型與多剛體動(dòng)力學(xué)模型的水平系泊回復(fù)力動(dòng)力放大系數(shù),見(jiàn)表6.

表6 水平系泊回復(fù)力動(dòng)力放大系數(shù)Table 6 Mooring restoring force dynamic magnification factor
可以看出,在同一海況重現(xiàn)期下,多剛體動(dòng)力學(xué)模型相較于Kane 動(dòng)力學(xué)模型的動(dòng)力放大系數(shù)顯著增大,說(shuō)明多剛體動(dòng)力學(xué)模型能夠較為全面反映定位系統(tǒng)三維空間拓?fù)浣Y(jié)構(gòu)的動(dòng)力效應(yīng);在不同的海況重現(xiàn)期下,Kane 動(dòng)力學(xué)的動(dòng)力放大系數(shù)穩(wěn)定在3.1 左右,而多剛體動(dòng)力學(xué)的動(dòng)力放大系數(shù)隨著海況重現(xiàn)期標(biāo)準(zhǔn)的提高而明顯增加,從一年一遇的13.7 增大到百年一遇的19.7,說(shuō)明劇烈海況會(huì)加劇多剛體動(dòng)力學(xué)的動(dòng)力放大效應(yīng).同時(shí),在傳統(tǒng)的靜力學(xué)分析附加安全因子的海工校核方法中,定位系統(tǒng)水平系泊回復(fù)力的動(dòng)力放大系數(shù)可以為安全因子選取提供理論參考.
3.3.2 系泊回復(fù)剛度
計(jì)算海洋核動(dòng)力平臺(tái)偏離平衡位置不同位移處的水平系泊回復(fù)力,即得到核動(dòng)力平臺(tái)在準(zhǔn)靜力學(xué)和Kane 動(dòng)力學(xué)模型下的系泊回復(fù)剛度,本文以縱向位移0~ 8 m 為例,如圖14 所示.與準(zhǔn)靜力學(xué)和Kane 動(dòng)力學(xué)模型的系泊剛度有解析解不同,多剛體動(dòng)力學(xué)模型在求解時(shí)采用數(shù)值積分方法,因此只能得到多剛體動(dòng)力模型系泊剛度的數(shù)值解.計(jì)算一年一遇、十年一遇和百年一遇海況下多剛體動(dòng)力模型系泊回復(fù)剛度曲線,如圖15 所示.

圖14 準(zhǔn)靜力模型[12]和Kane 動(dòng)力學(xué)模型[14]系泊回復(fù)剛度Fig.14 Mooring restoring stiffness curve of quasi-static[12] and Kane dynamic[14] models

圖15 不同重現(xiàn)期海況多剛體動(dòng)力學(xué)模型系泊回復(fù)剛度Fig.15 Mooring restoring stiffness curve of multi-body dynamic model in sea conditions of different return periods
從圖14 可以看出,在縱向位移0~ 5 m 范圍內(nèi),準(zhǔn)靜力學(xué)模型與Kane 動(dòng)力學(xué)模型計(jì)算的系泊回復(fù)剛度曲線吻合度良好;當(dāng)縱向位移大于5 m 時(shí),Kane 動(dòng)力學(xué)模型計(jì)算的系泊回復(fù)剛度曲線顯著增大.準(zhǔn)靜力學(xué)模型的水平系泊回復(fù)力與縱向位移基本呈現(xiàn)線性關(guān)系,其系泊回復(fù)剛度曲線的斜率為3.68 × 105N/m;而Kane 動(dòng)力學(xué)模型的水平系泊回復(fù)力與縱向位移呈現(xiàn)非線性關(guān)系,特別是縱向位移較大時(shí)更加明顯,說(shuō)明當(dāng)核動(dòng)力平臺(tái)在出現(xiàn)大幅運(yùn)動(dòng)時(shí),基于準(zhǔn)靜力學(xué)的系泊回復(fù)剛度無(wú)法反應(yīng)定位系統(tǒng)的本構(gòu)關(guān)系,對(duì)于定位系統(tǒng)的剛度設(shè)計(jì)帶來(lái)了危險(xiǎn)性.
從圖15 可以看出,在同一海況重現(xiàn)期下,多剛體動(dòng)力模型的系泊回復(fù)剛度曲線具有顯著的非線性特征,且縱向位移越大系泊回復(fù)剛度的斜率越大;在不同的海況重現(xiàn)期下,可以參考圖中系泊回復(fù)剛度曲線計(jì)算定位系統(tǒng)的受力與運(yùn)動(dòng)響應(yīng).
根據(jù)圖14 和圖15 的計(jì)算數(shù)據(jù),本文近似給定等效線性回復(fù)力系數(shù),見(jiàn)表7.

表7 等效線性回復(fù)力系數(shù)Table 7 Equivalent linear restoring force coefficient
3.3.3 連接節(jié)點(diǎn)受力
鉸和軸承等連接結(jié)構(gòu)是定位系統(tǒng)的核心連接部件,實(shí)現(xiàn)系泊回復(fù)力的傳遞,并且多鉸組合的連接形式使得定位系統(tǒng)具有柔性特質(zhì),共同完成多自由度的耦合機(jī)械運(yùn)動(dòng).因此,鉸節(jié)點(diǎn)的受力狀態(tài)直接關(guān)系到定位系統(tǒng)的系泊安全.基于多體動(dòng)力學(xué)的遞推算法可以建立定位系統(tǒng)各單體的動(dòng)力學(xué)方程,依次由圖3 中的B4,B3,B2,B1,B0逐一進(jìn)行動(dòng)力學(xué)計(jì)算,從而得到各連接結(jié)構(gòu)的受力信息.以100 年一遇海況為例,計(jì)算了定位系統(tǒng)單點(diǎn)轉(zhuǎn)塔的受力時(shí)程,如圖16所示(X為橫蕩方向;Y為縱蕩方向;Z為垂蕩方向).圖17 左系泊腿下部鉸節(jié)點(diǎn)受力信息(其他鉸節(jié)點(diǎn)受力圖不再列出).各連接節(jié)點(diǎn)的受力統(tǒng)計(jì)特征值見(jiàn)表8.各連接結(jié)構(gòu)受力均值對(duì)比情況如圖18 所示.

表8 連接節(jié)點(diǎn)受力統(tǒng)計(jì)特征值Table 8 Statistical characteristic value of hinge structure
從圖16 和圖17 可以看出,多剛體動(dòng)力學(xué)模型可以得到定位系統(tǒng)各鉸節(jié)點(diǎn)在X方向受力時(shí)程,可以解決Kane 動(dòng)力學(xué)模型在定位系統(tǒng)橫蕩方向簡(jiǎn)化導(dǎo)致的受力缺失.同時(shí),各鉸節(jié)點(diǎn)在其他方向受力時(shí)程可用于后續(xù)的強(qiáng)度校核與疲勞評(píng)估.

圖16 單點(diǎn)轉(zhuǎn)塔受力信息Fig.16 Single point turret force

圖17 左系泊腿下部連接節(jié)點(diǎn)受力信息Fig.17 Left mooring leg bottom hinge structure force
從圖18 可以看出,左系泊腿上部連接節(jié)點(diǎn)與右系泊腿上部連接節(jié)點(diǎn)Y方向受力之和為4.0 MN,約等于單點(diǎn)轉(zhuǎn)塔Y方向受力,說(shuō)明了定位系統(tǒng)縱向整體受力的合理性.但同樣可以發(fā)現(xiàn),定位系統(tǒng)的對(duì)稱(chēng)連接結(jié)構(gòu)(左右系泊腿的上下連接節(jié)點(diǎn))的受力并非完全對(duì)稱(chēng)一致,其中左右系泊腿上部連接節(jié)點(diǎn)Z方向受力均值分別為1.68 MN,2.43 MN,左右系泊腿下部連接節(jié)點(diǎn)Z方向受力均值分別為1.44 MN,2.18 MN,說(shuō)明在Kane 動(dòng)力學(xué)建模過(guò)程中將左右系泊腿簡(jiǎn)化為一個(gè)剛體是不合理的,而本文提出的多剛體動(dòng)力學(xué)模型考慮了左右系泊腿在運(yùn)動(dòng)受力過(guò)程中不一致性.

圖18 各連接結(jié)構(gòu)受力均值對(duì)比Fig.18 Comparison of mean force of each hinge structure
核動(dòng)力平臺(tái)船體在波浪載荷下進(jìn)行升沉運(yùn)動(dòng),即垂蕩(Z方向),連接節(jié)點(diǎn)在Z方向承受周期性交變載荷,極易造成疲勞損傷,影響平臺(tái)定位系統(tǒng)結(jié)構(gòu)安全.針對(duì)左右上鉸節(jié)點(diǎn)Z方向受力的頻譜分析,如圖19 和圖20 所示.可以看出,兩節(jié)點(diǎn)受力的頻率主要集中在0.1 Hz,這與百年一遇設(shè)計(jì)海況譜峰周期Tp的10.3 s 相對(duì)應(yīng),驗(yàn)證了多體動(dòng)力學(xué)節(jié)點(diǎn)受力在頻域范圍內(nèi)的合理性;同時(shí),波頻運(yùn)動(dòng)是引起連接節(jié)點(diǎn)交變載荷的主要因素,應(yīng)關(guān)注左右上連接節(jié)點(diǎn)的疲勞損傷情況.

圖19 左上鉸節(jié)點(diǎn)受力頻譜圖Fig.19 Force spectrum of left-upper hinge structure

圖20 右上鉸節(jié)點(diǎn)受力頻譜圖Fig.20 Force spectrum of right-upper hinge structure
4 結(jié)論與討論
本文提出了海洋核動(dòng)力平臺(tái)定位系統(tǒng)多剛體動(dòng)力學(xué)模型,通過(guò)譜分析與線性疊加原理相結(jié)合的方法計(jì)算了海洋核動(dòng)力平臺(tái)在設(shè)計(jì)海況(一年一遇、十年一遇和百年一遇)下的六自由度響應(yīng)時(shí)程,并代入到多體動(dòng)力學(xué)模型與準(zhǔn)靜力學(xué)模型和Kane動(dòng)力學(xué)模型進(jìn)行對(duì)比分析,主要結(jié)論如下.
(1)對(duì)比于準(zhǔn)靜力學(xué)模型與Kane 動(dòng)力學(xué)模型,多體動(dòng)力學(xué)模型得到水平系泊回復(fù)力具有顯著的動(dòng)力效果.同時(shí),提出了系泊回復(fù)力動(dòng)力放大系數(shù)的概念,多剛體動(dòng)力學(xué)的動(dòng)力放大系數(shù)隨著海況重現(xiàn)期標(biāo)準(zhǔn)的提高而明顯增加.
(2)多剛體動(dòng)力學(xué)模型計(jì)算的系泊回復(fù)剛度曲線具有顯著的非線性特征,且縱向位移越大系泊回復(fù)剛度的斜率越大,其等效線性剛度幅值的數(shù)量級(jí)為106N/m.
(3)計(jì)算了定位系統(tǒng)各連接結(jié)構(gòu)的受力行為,驗(yàn)證了定位系統(tǒng)縱向整體受力的合理性.同時(shí),發(fā)現(xiàn)定位系統(tǒng)對(duì)稱(chēng)連接節(jié)點(diǎn)位置(左右系泊腿的上下連接結(jié)構(gòu))的受力并非對(duì)稱(chēng)一致.
本文的研究還存在一些不足,如設(shè)計(jì)海況計(jì)算時(shí)尚未考慮二階運(yùn)動(dòng)響應(yīng)計(jì)算,主要以一階RAO 為主;算例計(jì)算中尚未考慮平臺(tái)運(yùn)動(dòng)響應(yīng)傳遞函數(shù)中的相頻特性,構(gòu)造的時(shí)程只是在功率譜的統(tǒng)計(jì)特征上滿足設(shè)計(jì)海況;由于輸入量左系泊腿橫擺需要實(shí)測(cè)數(shù)據(jù),算例只進(jìn)行了六自由度信息的輸入,以后將對(duì)該問(wèn)題做進(jìn)一步改進(jìn).
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19