
基于安全結構理論的系統外部擾動演化規律研究*
2022-06-17 00:51:26郭力萌金智新王延生鄧存寶
中國安全生產科學技術 2022年5期
郭力萌,金智新,王延生,2,趙 彬,鄧存寶,喬 玲
(1.太原理工大學 安全與應急管理工程學院,山西 太原 030024;2.晉能控股集團有限公司,山西 大同 037000;3.太原市軌道交通發展有限公司,山西 太原 030002)
0 引言
安全系統把安全本身作為系統,是分析安全問題的重要研究對象[1],通過全面研究安全系統內、外部影響因素對安全事件發生發展及演化的影響,可為安全事件的主動防控奠定基礎。
目前的研究多集中在安全系統內部因素對安全事件的影響,如吳成偉[2]提出的物聯網智能監測系統主要監測建筑物內部消防設施;Zhang等[3]采用車輛安全報警系統檢測內部環境以確保人員安全。在安全工作中常常由于較重視系統內部變化,對系統外部影響因素考慮偏少,導致即使進行了嚴密調控后仍存在較高的事故概率。近年來,學者們開始研究對安全事件演化具有擾動影響的系統外部因素,如劉志宏[4]針對城市軌道交通信息系統內外部的入侵建立信息安全綜合防護機制;Wang等[5]結合內外部因素評價矩陣來分析公司的內外部安全環境。雖然探討了系統外部影響,但依舊是以內部影響因素為主,連帶考慮外部影響,并未揭示外部影響因素對系統內部的作用機制。隨著對安全問題中外部因素擾動作用認識的不斷加深,學者們逐漸開始把外部影響因素作為分析安全問題的重要對象,如Harolds[6]認為改善外部環境可以減少衛生診斷系統的錯誤;劉韻[7]從高速鐵路的外部因素入手,研究重慶高鐵外部環境安全監測系統。雖然以系統外部影響為研究主體,但依舊未能對外部影響因素的變化規律及擾動機制有深入研究,而且缺乏對擾動特性的系統性梳理,導致安全領域至今仍沒有能夠揭示系統外部擾動對安全事件發生和演化影響共性規律的理論。因此,亟需揭示外部擾動過程中安全事件的演化規律,建立事故主動安全防控機制,從而為建立具有完整數學邏輯分析體系的系統外部擾動安全防控理論奠定基礎。
金智新等[8]提出并構建了安全結構理論,為主動安全防控奠定較為完備的理論基礎,但關于系統外部擾動作用并未深入研究。鑒于此,在安全結構理論的基礎上,從系統外部入手,依據工程學擾動概念及因素空間的數學表述,分析系統內部受外部擾動的響應機制及規律,提出外部擾動調控思路。將系統的內外部作用融合歸納,優化調控方法,以期為主動安全調控提供更完備的理論指導。
1 理論基礎
1.1 工程學外部擾動理論概述
1974年,美國學者Desai提出擾動狀態概念,為工程材料提供統一的本構模擬方法[9]。主要思想是變形材料單元在外部荷載作用下,材料自調整導致內部微結構變化,引起觀測響應的擾動,使初始時刻相對完整狀態轉化為完全調整狀態。
安全系統可以分為系統內部和系統外部,將擾動狀態思想應用于安全領域,認為系統內部在受到外部影響后發生變化,導致安全事件結果與預期發生偏差。將擾動概念融入安全科學領域,明晰外部作用機制與內部響應規律,提出擾動調控思路,以豐富擾動作用下的安全調控理論內涵。
1.2 安全結構理論概述
安全結構理論將安全定義為活動與活動環境作用形成的結構形態。安全事件是安全系統內活動狀態變化引發環境狀態變化的結果,活動狀態的改變是安全事件演化的內在動力。事故是活動對環境的作用導致環境因素狀態偏離正常區域的結果,即安全事件朝著不被期望方向的演化結果[10]。基于安全結構理論分析外部擾動問題,涉及如下基本概念:
1)因素與因素狀態[11]
因素是構成事物的要素;因素的“取值”為因素的狀態;導致事故發生的因素狀態集稱為因素關于事故的因素屬性。如形狀是因素,形狀的取值方形、圓形等為因素狀態。
2)活動因素與活動環境因素
活動是為實現既定目標而進行的行為動作的總和,活動形態可由活動因素表征。活動環境因素指受活動影響其因素狀態發生改變的環境因素。
3)安全事件演化鏈條
即活動因素—活動環境因素—演化結果。當演化結果即活動環境因素狀態處于安全區域時,安全事件正常發展。
2 安全系統外部因素結構表達
2.1 系統劃分
對安全問題的研究,若未界定清晰的安全系統邊界,研究過程中易將系統內外部的影響因素雜糅,甚至缺少對系統外部影響的研究。為闡明安全事件的發展演化過程,給出系統與外部影響因素的概念:
定義1活動環境系統:給定區域內各級活動集及活動致變因素集合,記作E。
外部擾動導致系統內部變化,易使安全事件演化失去控制。為研究外部擾動作用機制,明晰外部因素概念,給出因素劃分條件。
因素劃分條件:根據因素間的主被動作用關系,將對活動因素作用的因素稱為主動作用因素,受活動因素影響的因素稱為被動響應因素。即活動環境系統內的活動致變因素為被動響應因素。
定義2外部因素:給定區域內對活動因素產生動態擾動影響的主動作用因素,記作d。
如馬路人行道場景中,行人穿過馬路視為活動,行人速度等為活動因素;馬路上的行車為環境,行車速度等為活動環境因素;光照強度對活動產生擾動作用,可作為行人活動環境系統的外部因素。
定義3安全管控空間:將活動環境系統E、外部因素d以及相關關系R組成的動態空間稱為安全管控空間P,P=(E,d,R)。包含安全事件演化的全部因素,是安全事件的演化和調控空間。
2.2 外部因素拓撲結構
結構決定事物的屬性,是研究事物的前提。將外部因素關系網中各因素抽象為點,因素間的相關關系抽象為線,由點和線組成外部因素拓撲結構[12]。如圖1所示,以安全管控空間為根節點逐級劃分,得到可直接測得因素狀態的原子外部因素,后續研究均為原子外部因素,簡稱為外部因素。

圖1 外部因素拓撲結構有向圖Fig.1 Directed graph of external factor topology
拓撲結構圖直觀地展現外部因素的相關關系及層次結構,可作為各類分析中外部因素的基礎架構,為后續外部因素狀態演化研究提供結構理論基礎。
2.3 擾動域
外部因素在活動環境系統的整個生命周期內產生持續的擾動作用,然而由于系統穩定性,外部因素狀態達到一定值時才會使系統產生擾動響應。將對活動因素狀態造成影響的外部因素狀態稱為外部因素擾動狀態s(d)。當擾動作用點屬于活動環境系統時,可以等價表示為對活動因素狀態的擾動。
定義4擾動域:外部因素擾動狀態的集合為外部因素關于活動因素的擾動屬性,稱活動因素的所有外部因素的擾動屬性組合為外部因素擾動域P(w),如式(1)所示:
(1)
式中:w為活動因素,dk為w的外部因素;Bk為dk關于w的擾動屬性,k=1,2,…,m,m為正整數。
圖2以3個同級外部因素構成的三維坐標架為例說明擾動域的幾何形態。長方體為外部因素所有狀態構成的集合域,橢球體為系統不受外部因素影響的穩定域,長方體去掉橢球體的區域即為此3個外部因素的擾動域。s(td1,td2,td3)曲線為某刻外部因素綜合擾動狀態的變化軌跡。
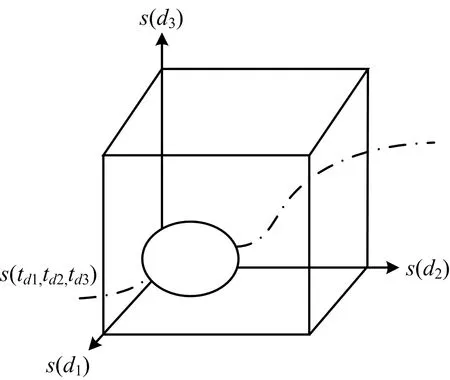
圖2 3個外部因素擾動域Fig.2 Disturbance domain of three external factors
基于擾動域的概念,安全事件的外部失穩演化過程如圖3所示。當外部因素綜合擾動狀態處于穩定域時,活動因素狀態不變,事件保持正常演化;當綜合擾動狀態在擾動域內變化時,活動因素狀態受擾動影響變化,且擾動狀態處于不同位置導致不同程度的擾動,安全事件演化過程也隨擾動程度加劇由安全轉為危險;當活動因素狀態失穩,事故發生。
利用外部因素擾動域,根據某時刻外部因素的綜合擾動狀態,判斷活動因素狀態變化,推斷安全事件的演化結果,以此對外部因素進行分類調控。
3 外部因素狀態動態演化規律
外部因素狀態改變導致活動因素狀態變化,影響安全事件的正常演化過程。為全面分析安全事件,須了解外部因素狀態隨時間的演化特性,給定初始時刻外部因素狀態s0,將各類演化形式視為連續變化的特殊類別并分為以下幾類。
3.1 臨界狀態演化
外部因素臨界狀態演化指外部因素狀態隨時間變化存在最大臨界狀態,給出如下閾值定義。
定義5:設外部因素狀態為s(d),?sr∈s,使得時刻t取任意值時,均有st≤sr成立,稱sr為外部因素的臨界狀態。
如圖4(a)~(c)所示,sr作為外部因素的閾值,各類波動趨勢的狀態最大值均無限趨近閾值。如馬路人行道場景中,光照強度總在閾值范圍內波動。
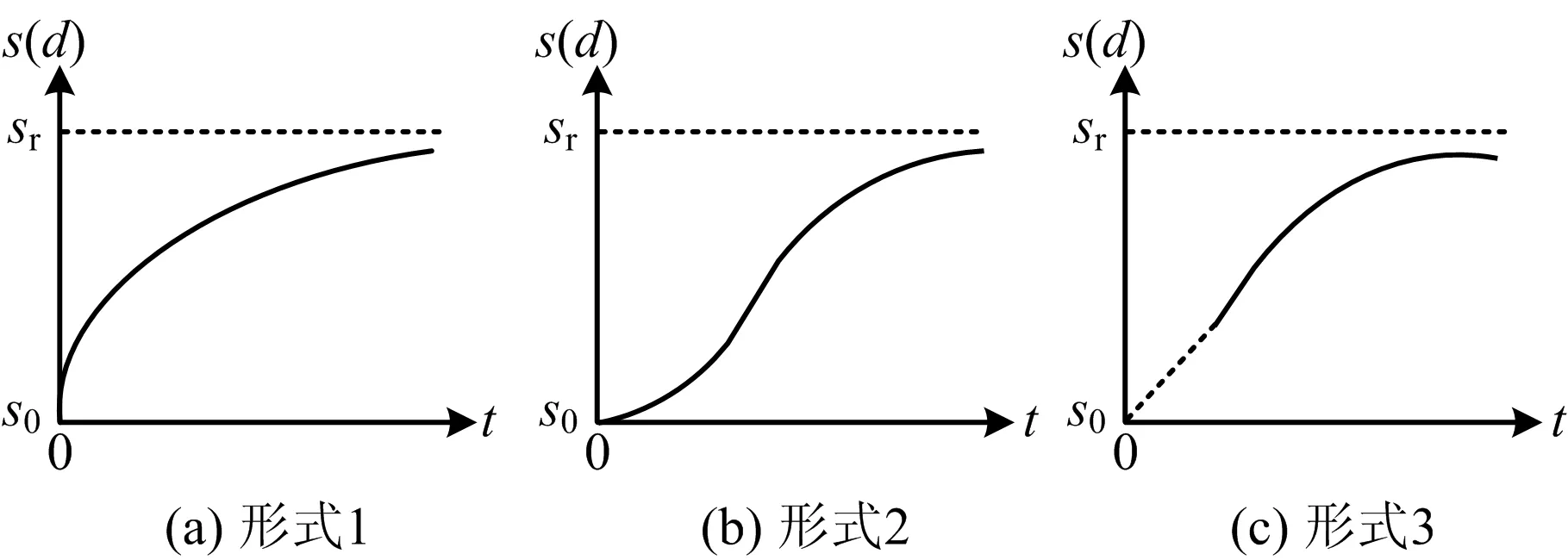
圖4 外部因素狀態臨界狀態演化規律Fig.4 Evolution law of critical state of external factors
3.2 臨界時刻演化
外部因素臨界時刻演化指外部因素狀態在某時刻達到極值,即外部因素狀態在臨界時刻發生劇變,給出如下閾值定義。
定義6:設?tr∈t,趨近tr時外部因素狀態迅速增加到極大值,稱tr為外部因素的臨界時刻。
如圖5(a)~(c),臨界時刻tr作為外部因素狀態演化的閾值,表示外部因素擁有固定的壽命周期,需預留一定時間進行調整優化。如馬路人行道場景中,行人密度在某時刻達到最大值,屬周期性因素。

圖5 外部因素狀態臨界時刻演化規律Fig.5 Evolution law of critical time of external factor state
3.3 無臨界閾值演化
外部因素無臨界閾值演化指外部因素狀態變化無任何極值,始終呈自由波動變化,給出如下定義。
定義7:當外部因素狀態無規律變化時,稱這類外部因素為無臨界閾值的外部因素。
外部因素狀態s(d)隨時刻t變化如圖6(a)~(c)所示,無臨界閾值說明外部因素狀態無極值,如馬路人行道場景中,噪聲變化無極值。此類因素需設置安全閾值,及時進行調控,避免造成嚴重的后果。
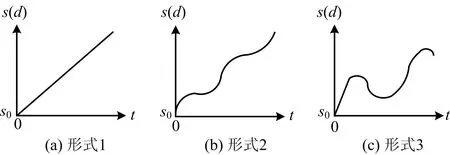
圖6 外部因素狀態無臨界演化規律Fig.6 Non-critical evolution law of external factor state
根據以上外部因素狀態隨時間的演化規律,可用數學邏輯方法表述演化過程,從演化曲線中預判因素狀態,及時采取措施以減少事故的發生。歸納各類外部因素狀態的演化特征和閾值,可證明外部因素狀態隨時間變化存在一定的必然性和可控性。
4 活動因素的外部擾動響應
外部因素擾動使活動因素狀態發生動態變化,為降低事故發生概率,引導安全事件正向發展,對活動因素狀態受外部因素擾動的響應機制及二者間的擾動響應規律進行分類分析。
4.1 活動因素的外部擾動響應機制
擾動響應機制是研究外部擾動問題的根本出發點,如圖7所示,外部因素d通過對活動因素w產生擾動,導致活動環境因素f發生變化,最終影響安全事件的演化進程。
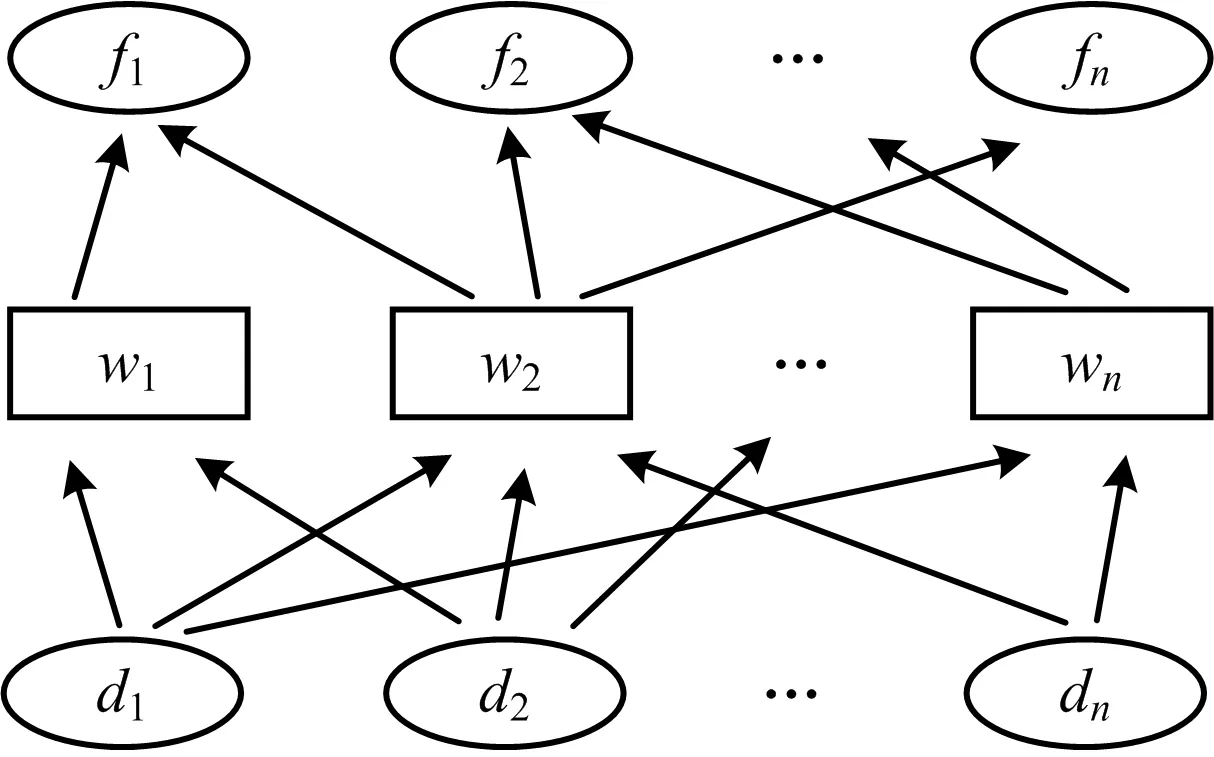
圖7 外部因素的擾動響應過程Fig.7 Disturbance response process of external factors
設初始時刻的活動因素是無擾動狀態z0,則有活動因素響應狀態z(t),如式(2)所示:
z(t)=H(s(di))
(2)
式中:s(di)為外部因素狀態;H為擾動響應函數,i=1,2,…,n,n為正整數。
在活動的生命周期內,外部因素對活動因素產生持續的擾動作用,將活動因素的狀態變化值與無擾動狀態疊加,可得到某時刻活動因素的響應狀態。基于系統穩定性的概念,初始時刻后的一定時間內活動因素將保持無擾動狀態。設活動失穩臨界狀態zr,對應的外部因素狀態s1,有如下擾動響應形式。
4.2 活動因素狀態的外部擾動響應形式
4.2.1 臨界狀態sr形式
外部因素狀態隨時間以臨界狀態形式變化時,存在狀態閾值sr。已知si≤sr,活動因素狀態的外部擾動響應曲線如圖8(a)~(c)所示。當s1
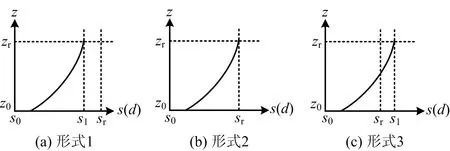
圖8 臨界狀態擾動—響應規律Fig.8 Disturbance-response law of critical state
根據活動因素狀態進入失穩臨界狀態時,外部因素狀態與閾值的關系,可采取不同的調控方法,通過最便捷的方法達到最優的調控效果。
4.2.2 臨界時刻tr形式
當外部因素狀態隨時間以臨界時刻形式變化時,存在時刻閾值tr,因素的生命周期為0~tr。如圖9(a),設外部因素狀態在時刻t1后迅速增加,稱t1時刻的曲線斜率kr為極限斜率,將t1時刻的外部因素狀態s2作為活動因素狀態受外部擾動的重要響應狀態。活動因素狀態的外部擾動響應曲線如圖9(b)~(d)所示。當s2
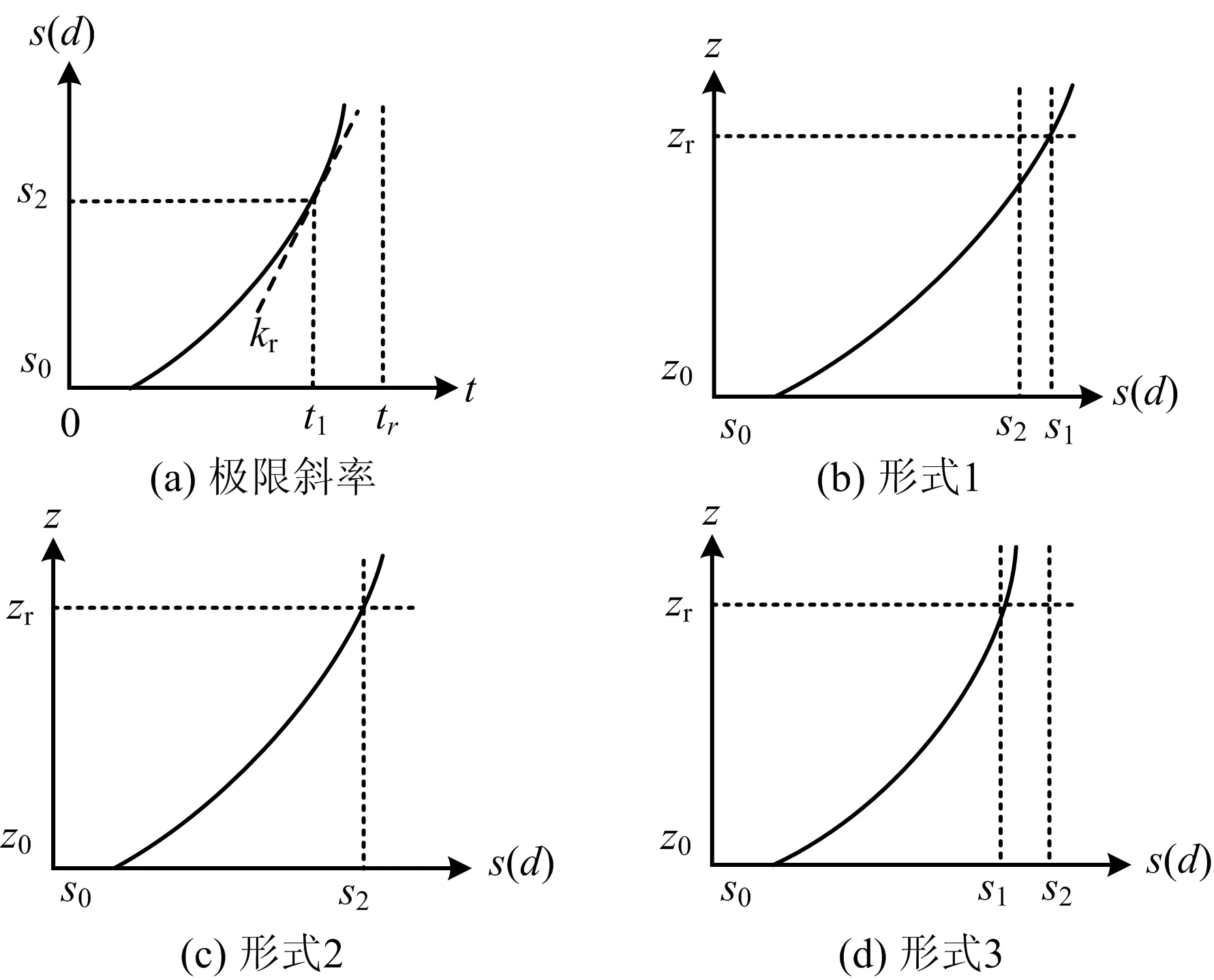
圖9 臨界時刻擾動—響應規律Fig.9 Disturbance-response law of critical time
kr與s2是此類演化形式的重要閾值,安全調控工作若在曲線變化斜率到達kr前完成,可及時控制外部因素狀態突變,降低事故發生概率。
4.2.3 無臨界閾值形式
當外部因素狀態隨時間以無閾值形式變化時,外部因素狀態變化無閾值,活動因素狀態的外部擾動響應曲線如圖10所示。雖然外部因素狀態演化不存在閾值,但活動因素狀態必在時刻t2進入zr,t2時刻的外部因素狀態s1是活動因素失穩的臨界狀態和安全調控時決定安全裕量的重要參數。如路口噪聲不存在閾值,但當噪聲為s1時,行人速度為失穩狀態zr,存在如圖10的變化形式,需要進行實時監控,及時采取控制措施。
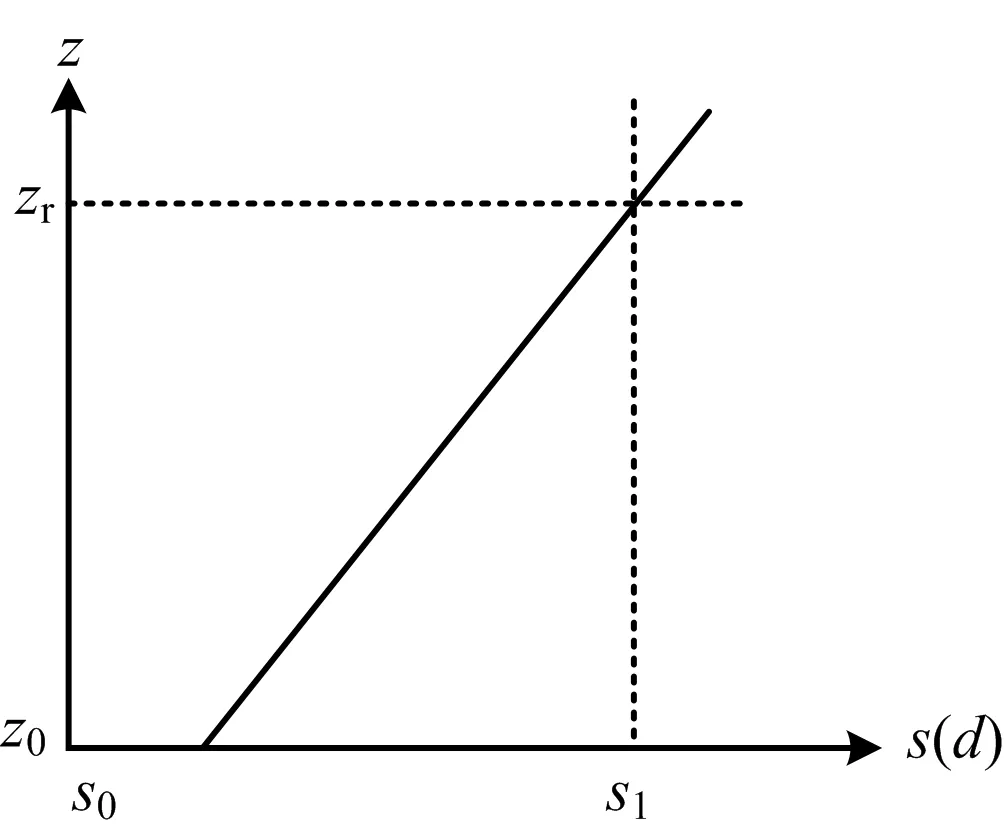
圖10 無臨界擾動—響應規律Fig.10 Non-critical disturbance-response law
對各類外部因素狀態演化形式下活動因素狀態演化趨勢的分析,為制定外部擾動調控方法指明方向。分析擾動響應曲線的變化趨勢,根據數學邏輯關系預判活動因素狀態,對外部因素進行主動調控,可從源頭改變安全事件的演化方向和進程,降低事故發生概率,提高整體安全性。
5 結論
1)外部擾動問題研究的是活動環境系統和外部因素及二者作用關系。活動環境系統是安全事件發展演化的主體;外部因素是對活動環境系統產生持續動態擾動影響的主動作用因素;二者間的作用關系推動了安全事件演化進程。
2)拓撲結構是證明外部因素相互獨立性和層級關聯性的整體架構。外部因素時變特性是外部因素狀態隨時間的演化規律,呈現波動漸近的2類漸近變化形式和始終平穩波動的自由變化形式。
3)外部因素對安全事件演化過程的擾動通過外部因素—活動因素—環境因素構成的安全事件演化鏈條逐級體現。活動因素的外部擾動響應規律是活動因素狀態受外部因素擾動呈規則曲線波動,并受臨界狀態、臨界時刻等閾值限制。特別地,無臨界形式為特殊的線性變化且不受閾值限制。
4)在安全科學領域中,對于安全系統外部擾動問題的研究尚處于初步階段,外部因素與活動因素的作用機制、演化機理及響應效果等方面有待進一步完善。后續將在繼續完善外部擾動分析方法的基礎上融合安全調控思想,對安全結構調控展開分析。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
快樂語文(2020年30期)2021-01-14 01:05:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
