基于MI地磁傳感器的低成本慣性組合導航裝置設計
2022-06-21 11:27:46彭宏偉梁列全溫梓呈童桂超
物聯網技術 2022年6期
關鍵詞:實驗
彭宏偉,梁列全,溫梓呈,周 璇,童桂超
(1.上海創感傳感技術有限公司,上海 200125;2.廣東財經大學 信息學院,廣東 廣州 510320;3.華南理工大學 機械與汽車工程學院,廣東 廣州 510641)
0 引 言
組合導航是提高導航系統整體性能的有效技術手段。INS/GPS組合導航是當前最常見的組合導航技術,由GPS導航系統和慣性導航系統(Inertial Navigation System, INS)集成,它將兩種導航技術進行優勢互補,在民用和軍用領域得到廣泛應用。
INS/GPS組合導航精度的提高近年來引起了諸多研究人員的廣泛關注。然而,GPS短期失效環境下,低成本的慣性導航器件測量誤差會迅速累積,導致導航精度迅速下降。改進濾波算法能夠在一定程度上改進導航精度,但時間復雜度較高,且難以保證GPS失效時的導航精度,常用算法包括粒子濾波算法、自適應濾波算法、人工智能算法、人工神經網絡算法、模糊邏輯算法等。另一種方法為通過選擇易于集成的傳感器為系統提供輔助導航信息,以改善GPS衛星信號斷續情況下的定位精度,提高系統穩定性。例如,Du S等采用里程計數據改善組合導航精度;黃劍雄等人對視覺/慣導無人機組合導航算法展開研究,提出了自適應漸消卡爾曼濾波算法以降低視覺位姿信息滯后帶來的影響;徐士厚等利用電子羅盤和里程儀的輸出對INS/GPS數據進行修正;郭美玲等使用輪速傳感器、加速度計、橫擺角傳感器、方向盤傳感器和慣性傳感器構成組合導航系統;蔣長輝等引入雷達和氣壓計的速度數據和高度數據修正INS/GPS的累積誤差,這些方法均在不同程度上提高了系統的定位精度。
地磁是地球的固有屬性,地磁信息分布廣泛,獲取方便,同時,地磁信息是具有大小和方向的向量,可以視為導航信息的可靠來源。現有的地磁檢測傳感器分別基于3種不同的電磁效應,即磁感式(Magneto-Inductive)傳感器、霍爾傳感器和磁阻式(Magneto-Resistive)傳感器。霍爾地磁傳感器和MR地磁傳感器均存在精度不足、功耗較高、溫度特性不穩定等問題。而搭載MI元件的傳感器在精度、溫度特性、磁滯性能等方面比另外兩種傳感器表現更優秀。磁感式地磁傳感器具有霍爾地磁傳感器1萬倍以上的靈敏度。為此,本文選擇MI地磁傳感器RM3100作為地磁檢測傳感器。
MI/GPS/INS組合導航裝置在多種傳感器數據采集過程中可能會引入各種干擾噪聲,直接影響導航系統的測量精度。為此,本文提出了MI/GPS/INS組合導航方法,以提高GPS間歇性失效時的導航定位精度。
1 MI/GPS/INS組合導航裝置硬件設計
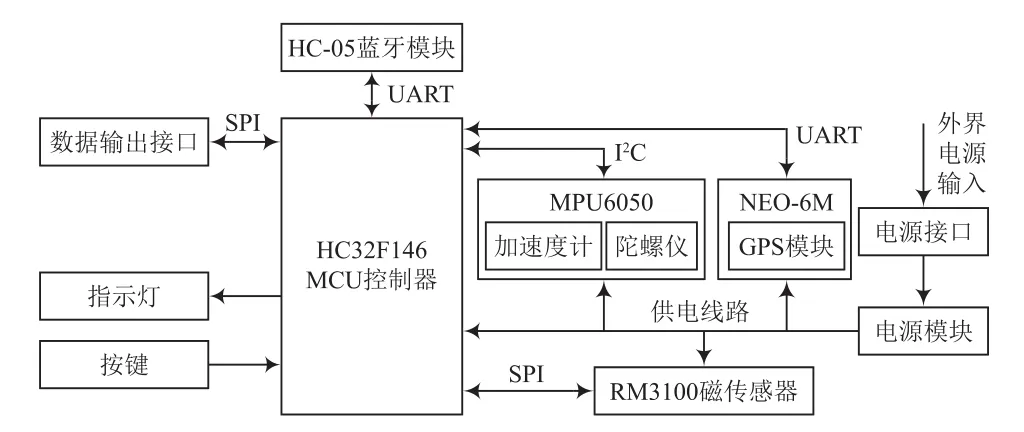
圖1 硬件結構框架
2 組合導航方法
MI/GPS/INS組合導航方法指利用MI傳感器修正慣性導航裝置的積分誤差,以提高GPS失效時的導航精度。組合導航方法流程如圖2所示,分為數據采集、數據濾波、數據校正、四元數解算、數據融合等步驟,最終可輸出的參數包括姿態歐拉角與軌跡坐標兩部分。
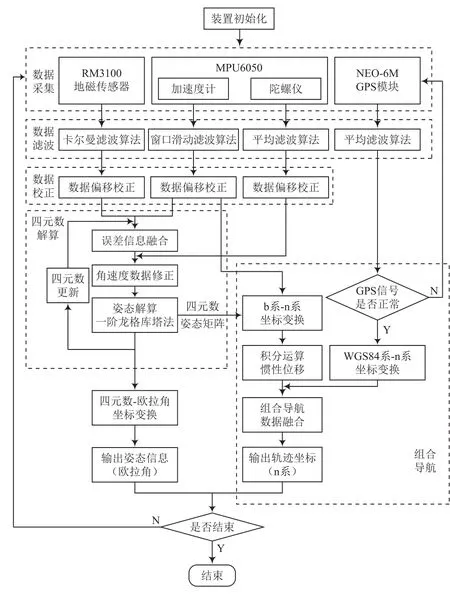
圖2 組合導航方法流程
2.1 數據采集
本裝置采集的數據包括GPS數據、加速度計數據、陀螺儀數據和地磁數據。GPS數據采集頻率與慣性導航、地磁數據的采集頻率難以同步,GPS采集頻率較低。當GPS采集間隔或失效時,地磁數據作為慣性導航數據的輔助數據,輸出慣性導航數據,當新的GPS數據采集完成時,融合慣性導航數據和GPS數據輸出軌跡坐標。
2.2 數據濾波
環境溫度變化和裝置運動對加速度計的干擾較大,經對比實驗發現,滑動窗口平均濾波算法與卡爾曼濾波算法相比,加速度計數據的濾波效果相差不大,選用計算量較小的滑動窗口平均濾波算法改善加速度計和陀螺儀采集的數據。
地磁傳感器誤差主要來自地磁場的隨機干擾,且磁場方向和大小不確定,一階卡爾曼濾波算法對高頻和隨機干擾噪聲的濾波效果較好,且響應速度較快。因此,地磁傳感器數據采用卡爾曼濾波算法降低干擾。
2.3 數據校正
加速度計在靜置狀態時存在重力加速度;地磁傳感器對工作環境的硬磁干擾十分敏感,且地磁傳感器、慣性測量模塊(加速度計和陀螺儀)的安裝位置存在一定距離,地磁傳感器的三軸坐標系與慣性測量單元坐標系的零點不在同一點上,因此,需要對地磁傳感器、加速度計以及陀螺儀進行零點偏移校正,校正數值通過初始標定試驗得到。
(1)加速度計初始標定方法
1.3 標準溶液的配制 根據需求,分別吸取適量的各腹瀉性貝類毒素標準溶液于5 mL棕色容量瓶中,用50%甲醇水溶液稀釋并定容,配制成標準儲備液。用空白基質液稀釋儲備液配制成各個不同濃度的標準工作液。各類標準溶液避光保存于-12 ℃。
加速度計用于測量載體的加速度。理論上,三軸加速度計采集的數據在空間上組成圓球,而圓球的球心為坐標軸的零點,球半徑為重力加速度的數值9.8 m/s。加速度計零點漂移通過基于六位取樣法的單軸零點校正算法進行校準。校正所用算法如式(1)所示:
式中:,,為靈敏度;,,為測量值;,,為偏移量。
(2)陀螺儀初始標定方法
靜止條件下,陀螺儀理論上三軸輸出均為0,實際測量會有偏移,通過平均偏移參數校正法進行校正。
(3)地磁傳感器初始標定方法
根據地磁傳感器原理,理論上磁場數據同樣在空間上構成球心在零點、球半徑為的球。但實際上,存在軟硬磁干擾以及傳感器加工誤差,得出的磁場數據組成橢球,因此通過校正橢球成為球形,就能完成地磁傳感器的零點校正。地磁傳感器的初始標定方法采用空間八字環繞法獲取,采用各軸數據最大、最小值的平均校正三軸數據。地磁傳感器校正前后對比如圖3所示。
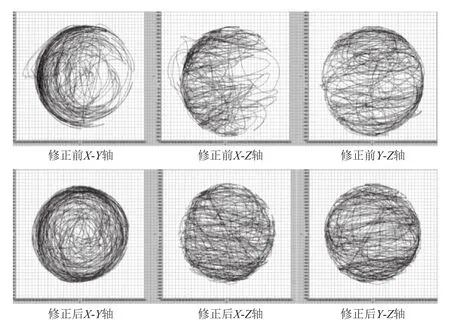
圖3 地磁傳感器數據修正前后對比圖
2.4 四元數解算
2.4.1 四元數法
載體的姿態解算是實現慣性導航的核心技術之一,通過姿態解算可以通過得到的載體姿態和導航參數計算所需參數。
目前常用的坐標系包括載體坐標系(b系)、WGS84坐標系(GPS坐標)和東北天坐標系(n系)。載體坐標系主要反映載體方向;慣性導航傳感器數據一般是基于載體的坐標系。不同坐標系之間的數據必須轉換到統一坐標系下才能融合。
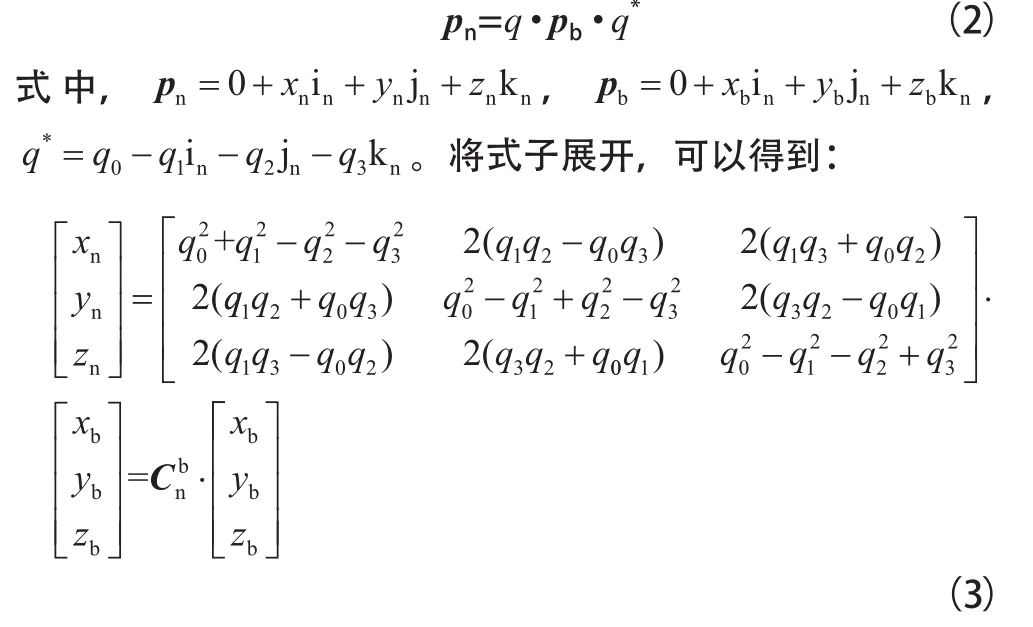
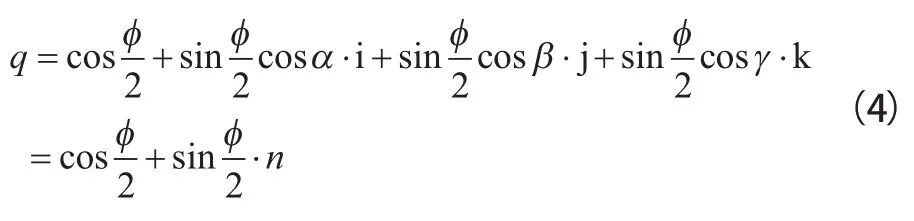
描述載體坐標相對地理坐標系方位關系的常用表示方法主要有3種,分別是歐拉角法、方向余弦法以及四元數法。歐拉角法又稱為三參數法,該方法由于不能用于全姿態飛行運載體而難以廣泛用于工程實踐,且實時計算困難。方向余弦法又稱為九參數法,該方法避免了“奇點”現象的出現,但方程計算量大,效率較低。四元數法又稱為四參數法,其由1個實數和3個復數組成,數學形式可以寫成=+i+j+k,其中 i=j=k=-1,,,,為實數。對于任意在載體坐標系下的三維向量,可以通過四元數法將其轉換為地理坐標系下的三維向量,如式(2)所示:

2.4.2 四元數解算
將上述方程寫成矩陣的形式:
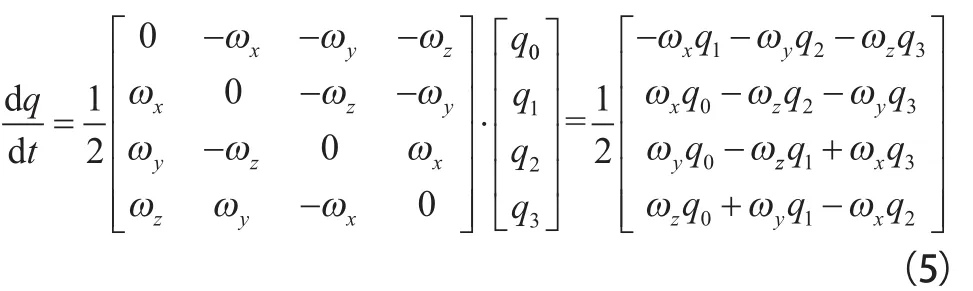
四元數更新:
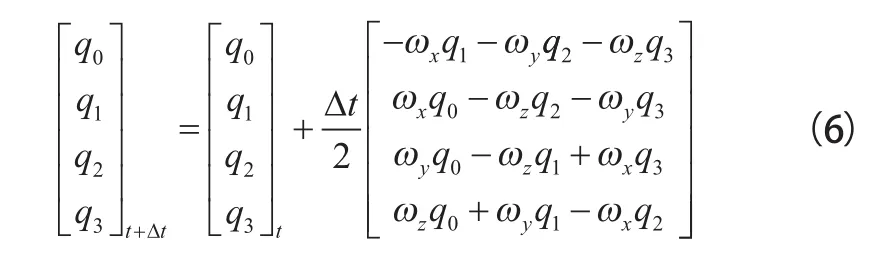
求出每個時刻的角速度ω,ω,ω就可以更新四元數。
2.4.3 加速度計與地磁傳感器誤差計算
陀螺儀可以測量三軸角速度,但陀螺儀依賴積分,而且存在漂移,所以不能只用陀螺儀測量的數據作為四元數更新的依據。本裝置通過加速度計以及地磁傳感器的數據融合校正陀螺儀的角速度,實現精確的姿態表示。加速度計和地磁傳感器的誤差計算包括數據歸一化、坐標變換以及誤差計算。加速度計利用地球重力加速度來修正誤差。載體僅受重力時,重力加速度為g,而對于加速度計所測量的三軸加速度,通過坐標變換可以獲得合加速度,但由于加速度計的測量誤差,導致測量值與實際值存在偏差,因此通過四元數姿態值估算加速度分量。地磁傳感器的誤差校正方法原理:地磁線方向從地理南極指向地理北極,地理坐標系下地磁矢量可以分解至軸和軸,軸方向(東西方向)分量為0。從地磁傳感器獲得的磁場數據通過坐標變換換算為地理坐標系下的磁場矢量,這兩組數據代表相同磁場,但由于測量誤差,這兩個磁場值不能完全重合,因此利用向量積描述該誤差,并且通過反饋誤差不斷減小該誤差,使得傳感器數據不斷逼近實際值,實現補償矯正。
2.4.4 誤差數據融合與角速度數據修正
加速度計數據在載體坐標系下測得,地磁傳感器數據在地理坐標系下測得,上述2個誤差向量的叉乘可以求出向量之間的夾角,即歐拉角。然后利用加速度計和地磁傳感器測量誤差的叉乘值修正四元數解算的陀螺儀角速度。
2.5 組合導航
載體軌跡通過計算每個采樣時間點的坐標位置,經連接后形成軌跡。坐標位置數據來源于兩方面,一是加速度測量得到的地理坐標系下的加速度,根據牛頓第二定律,通過積分可以得到位移,但由于加速度計自身的精度問題,使得載體自帶加速度,在兩次積分的作用下,隨著時間的推移,位移誤差累積導致加速度輸出不可靠,故論文采用四元數姿態矩陣在線更新、修正加速度累積誤差;二是GPS的衛星定位信息,可以提供絕對位置信息,但GPS相對刷新速度較慢,且當GPS間歇性失效時,缺乏定位信息。因此,根據不同情況對兩組數據進行融合,提高定位精度。
慣性導航坐標位置更新步驟:加速度各軸分量的坐標變換、加速度積分、速度積分、慣性導航數據更新;GPS坐標更新步驟:GPS數據采集、坐標系變換、GPS數據更新。
當GPS采樣時間到后,判斷GPS導航信息是否正常,若GPS導航信息不正常,則輸出慣性導航軌跡;若GPS導航信息正常,則采用二階互補濾波對GPS位移數據和慣性位移數據進行加權融合,并通過兩組位移的差值作為反饋,調整位移大小,最終輸出組合導航軌跡。
3 實驗與結果分析
論文設計了室內和室外兩種導航實驗,室外導航實驗和室內導航實驗分別用于驗證GPS信號正常和失效時,論文提出的組合導航方法的導航精度是否優于慣性組合導航的精度。
3.1 室外導航實驗
室外導航實驗進行了2組,分別選擇某大學內部教學樓外某路徑的2個方向進行,每組實驗分為2次,一次僅采用GPS導航,另一次采用論文的組合導航裝置。第一次實驗的路徑長度為200 m,實驗沿路徑的西邊緣向南行走,軌跡如圖4(a)所示;第二次行走實驗的路徑長為150 m,實驗沿路徑的北邊緣向東行走,軌跡如圖4(b)所示。紅色線為僅采用GPS導航的行走軌跡,藍色線為組合導航軌跡。
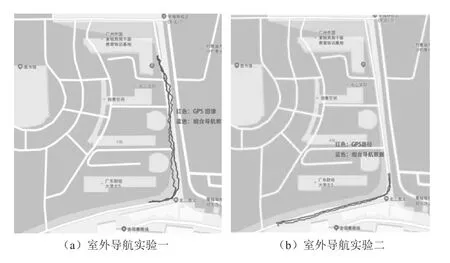
圖4 室外導航實驗軌跡對比圖
從圖4可以看出,論文研制的組合導航方法的導航軌跡比GPS導航更平滑,更接近實際的行走軌跡。因此,當GPS導航有效時,論文研制的組合導航裝置導航精度高于單一的GPS導航。
3.2 室內導航實驗
室內導航實驗主要驗證GPS失效情況下的導航效果,分別選擇教學樓室內走廊150 m和半室內走廊200 m進行實驗。實驗1在室內走廊進行,室內為全封閉環境,GPS信號微弱,室內走廊邊線用黑色線標出,紅色代表實驗時真實行走軌跡,藍色代表組合導航裝置的輸出軌跡。室內走廊寬度2.35 m,實驗時步行速度大約為1.2 m/s,實驗時間約為125 s。行走先向南,而后轉向西,如圖5中藍色箭頭所示。實驗2的室外走廊是一條連接不同教學樓的連廊,屬于半室外環境,GPS信號時斷時續。

圖5 室內組合導航軌跡與真實行走軌跡對比圖
從圖5可以看出,無論是GPS完全失效環境還是部分失效環境,組合導航的藍色輸出軌跡都能準確跟蹤真實的紅色行走軌跡,驗證了論文研制的組合導航裝置的有效性。
4 結 語
本文設計的磁感式地磁輔助組合導航方法包括數據濾波、數據標定、四元數解算以及數據融合算法等,與其他類型地磁輔助導航方式相比,本方法無需地磁圖先驗信息,且原理簡單、計算量小,有效解決了系統的零點漂移、環境干擾和誤差累積等問題。實驗結果表明,該方法有效融合了多傳感器信息,無需地磁圖先驗信息,在GPS短期失效或斷續連接時的導航精確度較高,有效抑制了常規慣性導航誤差。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
