基于激光制導(dǎo)的模擬曲射電磁炮設(shè)計(jì)
2022-06-21 11:28:00屈召貴孫學(xué)斌
物聯(lián)網(wǎng)技術(shù) 2022年6期
關(guān)鍵詞:系統(tǒng)
屈召貴,楊 睿,孫學(xué)斌,饒 蓉
(四川旅游學(xué)院,四川 成都 610100)
0 引 言
電磁炮是利用電磁發(fā)射技術(shù)制成的一種先進(jìn)動(dòng)能殺傷武器。與傳統(tǒng)大炮將火藥燃?xì)鈮毫ψ饔糜趶椡璨煌姶排谑抢秒姶畔到y(tǒng)中的洛倫茲力來對(duì)金屬炮彈進(jìn)行加速,使其達(dá)到打擊目標(biāo)所需的動(dòng)能,電磁炮可大大提高彈丸的速度和射程。電磁炮主要包括線圈電磁炮、軌道電磁炮、電熱炮和重接炮,主要由能源、加速器、開關(guān)三部分組成。
模擬實(shí)驗(yàn)系統(tǒng)采用線圈電磁炮結(jié)構(gòu),利用激光制導(dǎo)技術(shù)實(shí)現(xiàn)精確打耙。首先利用激光對(duì)前方一定范圍的目標(biāo)進(jìn)行掃描,確定耙標(biāo)位置和距離。然后利用大容量電容器作為能源、利用電磁線圈作為彈丸發(fā)射軌道,當(dāng)電容放電產(chǎn)生的瞬時(shí)大電流加到線圈上時(shí),纏繞在發(fā)射軌道上線圈炮管內(nèi)部就會(huì)產(chǎn)生巨大的洛倫茲力,彈丸受洛倫茲力的作用射出炮口,命中目標(biāo)。模擬系統(tǒng)可實(shí)現(xiàn)4 m,60°范圍的精確打耙。
1 電磁炮理論分析
1.1 電磁炮力學(xué)分析
電磁炮推動(dòng)金屬彈丸運(yùn)動(dòng)。根據(jù)洛倫茲力,將炮彈從軌道炮管里面發(fā)射出去,經(jīng)典計(jì)算公式為磁路的歐姆定律,如式(1)所示:

式中:為線圈中通過的電流;為線圈匝數(shù);為磁通截面積;為磁導(dǎo)率;稱為磁阻,表示磁路對(duì)磁通阻礙的物理量;為磁動(dòng)勢(shì);為磁通量。
1.2 儲(chǔ)能計(jì)算公式
電磁炮的能源決定了射程長(zhǎng)短,其能量?jī)?chǔ)存與磁阻、磁通量、線圈匝數(shù)相關(guān)。在空芯線圈中,為常量,與N的關(guān)系呈線性變化,儲(chǔ)存的磁場(chǎng)能如式(2)所示:

彈道分析:本系統(tǒng)彈道采用拋物線彈道。如圖1所示,云臺(tái)高度和炮彈落地距離滿足公式(3)、公式(4),與發(fā)射角度、速度等成線性關(guān)系。


圖1 拋體運(yùn)動(dòng)曲線
2 系統(tǒng)構(gòu)成
曲射電磁炮實(shí)驗(yàn)系統(tǒng)由控制系統(tǒng)、DC-DC升壓電路、高能電容儲(chǔ)能組件、高壓開關(guān)發(fā)射電路、2-DOF云臺(tái)組成炮架、炮管、線圈、激光測(cè)距傳感器和炮彈(鋼珠)組成,如圖2所示。
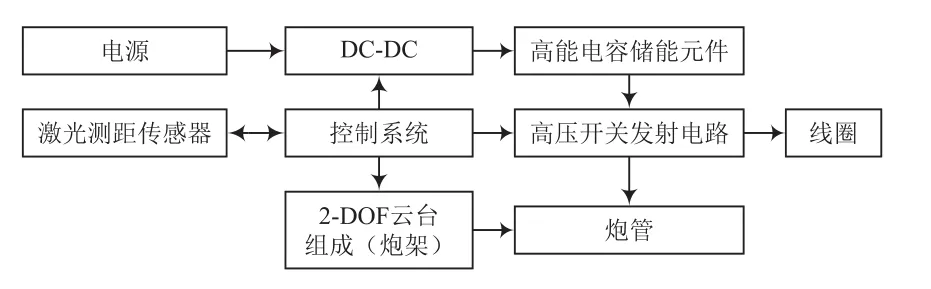
圖2 系統(tǒng)結(jié)構(gòu)
3 機(jī)械系統(tǒng)設(shè)計(jì)
機(jī)械系統(tǒng)由炮座、U型安裝槽、炮管固定卡、舵機(jī)運(yùn)動(dòng)機(jī)構(gòu)、齒輪等組成。2個(gè)舵機(jī)控制炮管的運(yùn)動(dòng)方向,調(diào)整炮管發(fā)射角度。1個(gè)舵機(jī)用來控制水平方向軸的運(yùn)動(dòng),1個(gè)舵機(jī)用來控制垂直方向軸的運(yùn)動(dòng)。炮架高度為29 cm,炮座長(zhǎng)為20 cm,寬為15 cm,炮管長(zhǎng)度為19 cm,如圖3所示。

圖3 機(jī)械系統(tǒng)組成
4 控制系統(tǒng)設(shè)計(jì)
控制系統(tǒng)由激光測(cè)距傳感器、DC-DC升壓電路、高壓開關(guān)發(fā)射電路、A/D模塊、二維自由度云臺(tái)(舵機(jī))和人機(jī)交互電容觸摸TFT顯示屏等組成。在電容觸摸TFT顯示屏上輸入?yún)?shù)執(zhí)行相應(yīng)的程序。激光傳感器用于測(cè)量炮位與靶標(biāo)之間的距離和角度。根據(jù)傳感器采集的數(shù)據(jù)計(jì)算出彈著點(diǎn)。單片機(jī)控制舵機(jī)轉(zhuǎn)到指定水平角度和俯仰角度,同時(shí)控制DC-DC升壓電路為高能電容儲(chǔ)能組件充電。充電完成后,啟動(dòng)高壓開關(guān)發(fā)射電路,線圈產(chǎn)生磁場(chǎng),發(fā)射炮彈(鋼珠)。系統(tǒng)控制電路結(jié)構(gòu)如圖4所示。

圖4 控制電路結(jié)構(gòu)
5 電路與程序設(shè)計(jì)
5.1 高壓開關(guān)電路設(shè)計(jì)
DC-DC高壓升壓電路通過單片機(jī)PD6控制繼電器啟動(dòng)升壓模塊,升壓模塊升壓后,為高能電容組件充電,充電完成后,通過單片機(jī)PD4控制繼電器,再通過繼電器觸發(fā)可控硅,為線圈通電,發(fā)射炮彈。本系統(tǒng)采用5 V電源供電,如圖5所示。

圖5 電源管理電路
5.2 程序設(shè)計(jì)
本系統(tǒng)采用觸摸屏控制參數(shù),按照不同的要求設(shè)置相應(yīng)的指令,系統(tǒng)發(fā)出動(dòng)作指令,數(shù)據(jù)反饋到與單片機(jī)相連的顯示屏。
系統(tǒng)初始化各功能模塊并自檢。炮管自動(dòng)調(diào)整水平和垂直角度分別歸零。參數(shù)輸入后,自動(dòng)調(diào)整炮管的水平角度和仰角角度,啟動(dòng)升壓模塊。充電完成后,自動(dòng)觸發(fā)高壓開關(guān)電路,發(fā)射炮彈(鋼珠)。
舵機(jī)是一種伺服控制機(jī)構(gòu),采用脈寬調(diào)制信號(hào)控制舵機(jī)角度。控制流程如圖6所示。

圖6 控制流程
6 測(cè)試與結(jié)果分析
6.1 測(cè)試方案
測(cè)量方案1:固定電壓為174 V,調(diào)整炮管垂直仰角,測(cè)量炮彈發(fā)射的距離。通過調(diào)整炮管的水平位置,測(cè)量炮彈彈著點(diǎn)。測(cè)試6次求平均數(shù)據(jù)。
測(cè)量方案2:固定靶標(biāo)的位置,用激光傳感器測(cè)量位置與實(shí)際的誤差。
6.2 測(cè)試儀器
儀器:萬用表、5 m卷尺、量角器、1 m鋼尺,測(cè)試系統(tǒng)實(shí)物如圖7所示。
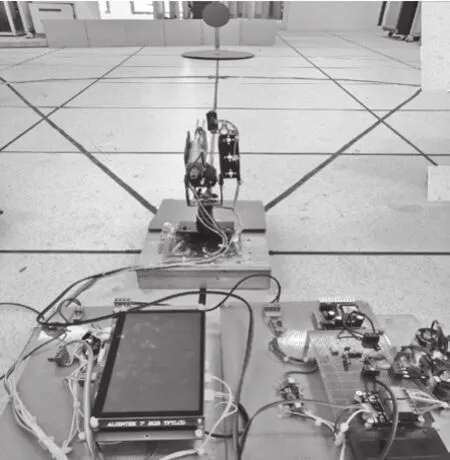
圖7 測(cè)試實(shí)物
分別從250 cm到350 cm處對(duì)激光測(cè)試距離數(shù)據(jù)和實(shí)際測(cè)試距離進(jìn)行對(duì)比測(cè)試。測(cè)試示意如圖8所示,測(cè)試對(duì)比數(shù)據(jù)如圖9所示。
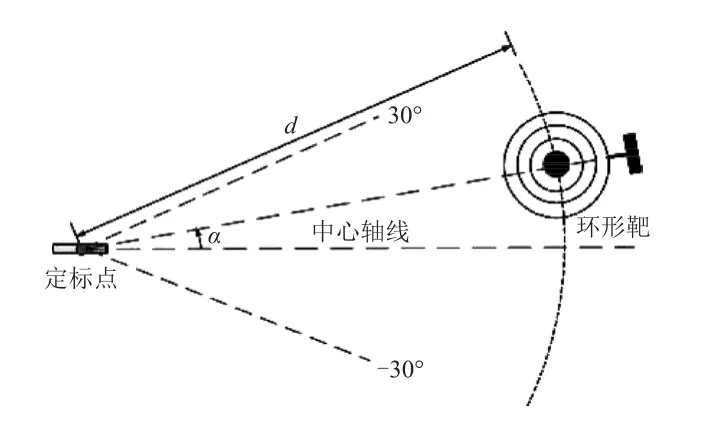
圖8 測(cè)試原理

圖9 激光測(cè)試距離測(cè)試
分別將電磁線圈電源電壓、仰角和炮彈距離一一對(duì)應(yīng)。電磁線圈電壓為174 V,仰角變化范圍為11°~29°,測(cè)試平均距離范圍為200~300 cm,仰角與實(shí)際測(cè)量距離測(cè)試數(shù)據(jù)如圖10所示。
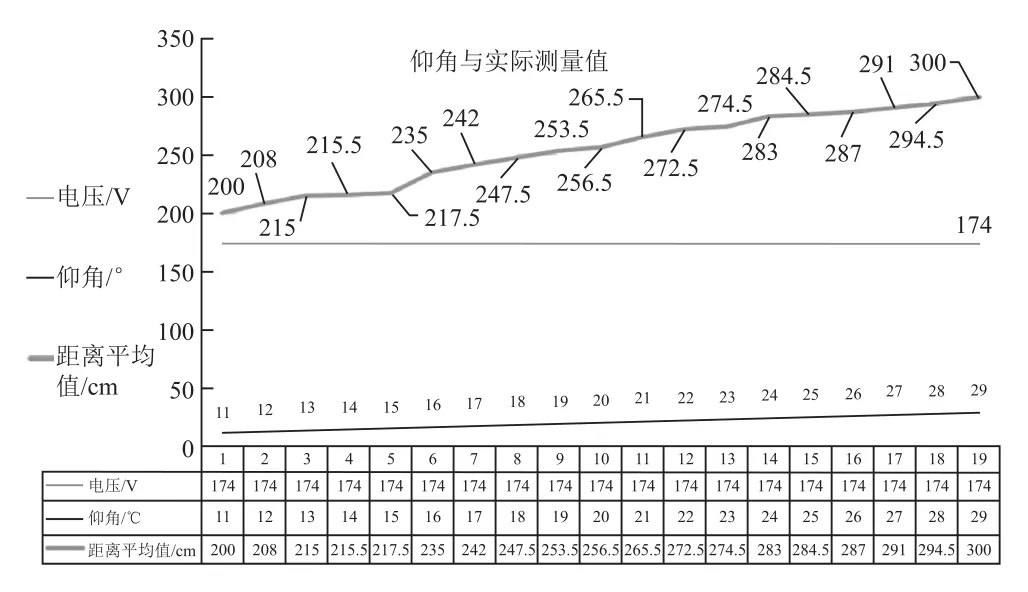
圖10 仰角與實(shí)際測(cè)量距離測(cè)試
7 結(jié) 語
文中設(shè)計(jì)的基于激光制導(dǎo)的模擬曲射電磁炮實(shí)驗(yàn)系統(tǒng),能實(shí)現(xiàn)炮管水平180°自由轉(zhuǎn)動(dòng),垂直方向90°范圍調(diào)節(jié),射程范圍在400 cm內(nèi)。可以通過實(shí)驗(yàn)系統(tǒng),訓(xùn)練學(xué)生的實(shí)踐動(dòng)手能力和創(chuàng)新能力。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- 面向新工科的智能鎖物聯(lián)網(wǎng)安全BYOD實(shí)驗(yàn)技術(shù)
- 融入創(chuàng)新創(chuàng)業(yè)理念的物聯(lián)網(wǎng)專業(yè)課程體系建設(shè)
- 項(xiàng)目驅(qū)動(dòng)與線上資源相融合的教學(xué)法在物聯(lián)網(wǎng)教學(xué)中的應(yīng)用
——以“傳感器原理及應(yīng)用”課程為例 - 意圖感知網(wǎng)絡(luò)助力物聯(lián)網(wǎng)發(fā)展
- 一種基于LoRaWAN的高擴(kuò)頻因子信道規(guī)劃在智能灌溉系統(tǒng)中應(yīng)用
- 基于51單片機(jī)的智能臺(tái)燈的設(shè)計(jì)與實(shí)現(xiàn)