液壓缸用外置式磁感應位移傳感器設計*
2022-06-23 06:27:34樊燁男廉自生
機電工程 2022年6期
樊燁男,高 飛,廉自生
(太原理工大學 機械與運載工程學院,山西 太原 030024)
0 引 言
電液伺服系統既具有液壓系統的優勢,又擁有電子系統的可控性能,使得其在采礦、機械制造等領域得到了廣泛應用。
液壓缸作為電液伺服系統的關鍵執行元件,其高精度、高可靠的位移檢測要求一直推動著測量技術的發展,各式各樣的位移傳感器也隨之出現。
近年來,較多學者對液壓缸位移檢測技術進行了研究。李學勝等人[1,2]基于磁致伸縮原理設計了適用于液壓缸的位移傳感器,其測量精度高、量程大;但該類傳感器結構復雜,需在活塞桿加工出深孔放置波導桿,對工藝要求較高,并且還涉及到傳感器的耐高壓問題,成本也很高。張文杰等人[3,4]利用磁環控制干簧管通斷,將位移轉變為電壓信號,實現了液壓缸位移檢測;但其測量精度受干簧管排列間隙影響,且抗振動差,干簧管易碎裂,檢修困難。陳陸曦等人[5,6]通過將活塞桿表層制成凹凸相間結構,實現了對永磁體磁力線的周期調制,使活塞桿具有標尺功能,達到了類磁柵的檢測效果;但是采用該方法得到的輸出信號過于微弱。李志賓等人[7]通過重新設計調理電路,提高了信號的輸出質量;但其電路過于復雜,成本也比較高昂。
以上研究針對的是液壓缸內置式位移傳感器,因而具有傳感器安裝工藝復雜、檢修困難等問題。
隨著磁感應技術的日趨成熟,PERIS C等人[8-13]使用霍爾或磁阻傳感器實現了位移測量,但大多數研究者都是利用工作在磁場飽和區的各向異性磁電阻(anisotropic magneto resistive,AMR),通過測量磁場角度來判斷位移量。
基于以上研究,筆者設計一款外置式磁感應位移傳感器,利用工作在非飽和磁場的TMR磁阻元件[14]檢測活塞永磁環運動時缸筒外部磁場強度的變化來實現對位移的測量,通過仿真模型分析磁場與磁阻的輸出信號,為計算永磁環位移提供理論基礎,并通過實驗對傳感器設計的可行性進行驗證。
1 傳感器構成及原理
液壓缸通過液壓閥控制進出液,將壓力能轉化為活塞的動能,繼而完成伸縮動作[15]。筆者據此原理設計了傳感器測量結構,主要包括活塞永磁環、外置磁感應位移傳感器兩部分。
傳感器結構如圖1所示。
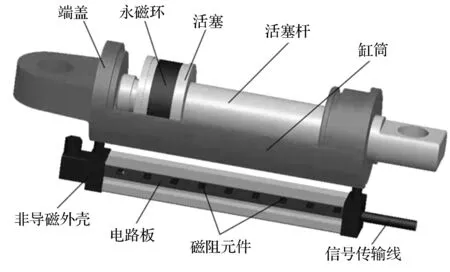
圖1 傳感器結構
1.1 活塞永磁環
筆者通過在活塞處安裝永磁環,將活塞的位移轉化為永磁環的位移。
永磁環安裝方法如下:首先在活塞表面加工出與永磁環尺寸相同的凹槽,隨后將非導磁材料,如工業陶瓷等均勻填入凹槽內,確保工作時不產生液體泄漏,同時減弱活塞的導磁作用,最后將永磁環嵌入凹槽內即可。
永磁環結構如圖2所示。
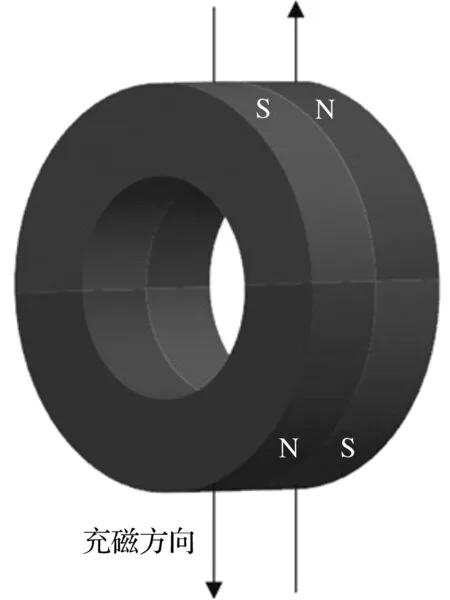
圖2 永磁環結構
永磁環由兩個徑向充磁、尺寸相同的釹鐵硼磁環組成,兩側會產生強度相同、方向相反的規律磁場,相比單個磁環,該結構更有助于提高測量位移的精度。
1.2 外置磁感應位移傳感器
由于缸筒為導磁材料,液壓缸外部磁場強度較弱,磁阻元件選用多維公司生產的TMR9002磁阻元件,如圖3所示。
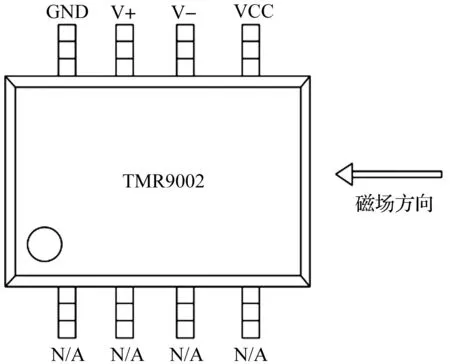
圖3 TMR9002磁阻元件
該磁阻元件在正向磁場下產生正向輸出電壓,輸出與磁場強度成正比,非線性度0.5%,靈敏度100 mV,且具有優越的溫度穩定性,無需進行溫度補償,抗電磁干擾能力強、精度高,滿足使用要求。
磁場檢測由直線排列的多個磁阻元件完成,與電路板一起封裝在非導磁外殼內,傳感器整體平行于活塞桿安裝在液壓缸缸筒外部,其軸線與永磁環充磁方向垂直。當永磁環發生位移時,缸筒外部磁場強度產生變化,磁阻元件將檢測到的磁場信號轉換為電壓信號,輸送至信號調理電路,通過單片機計算出永磁環位移。
相較以上幾種研究,該傳感器結構更為簡便,檢修難度更小,且永磁環使用壽命長、穩定性較高,無需經常更換。
2 傳感器電路設計
電路的主控制器需滿足采集頻率高、計算功能強大等條件,筆者在設計中選用STM32系列單片機,該系列單片機內置32 K~128 K的閃存,時鐘頻率36 MHz~72 MHz,能夠快速實現大量數據的采集、存儲、處理功能[16]。
傳感器電路圖如圖4所示。
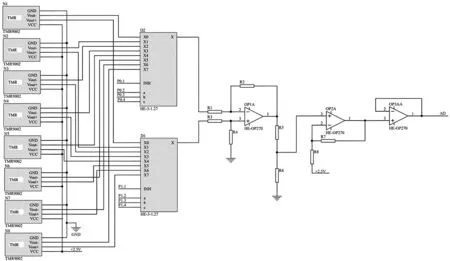
圖4 傳感器電路圖
筆者以8個TMR9002磁阻元件為一組進行信號采集,每組共輸出16路差分電壓信號,兩個多路選擇開關的使能端INH與通道選擇端a,b,c由單片機進行邏輯控制,同時選通某一個磁阻元件的兩路輸出;
因磁阻元件輸出幅值較小,為便于單片機電壓信號采集,需使用差分比例電路對信號進行放大處理,用2.5 V基準源與運算放大器組成偏置調節電路,通過調節電阻比例來調節偏置信號的大小,信號經放大與偏置后,利用電壓跟隨器接入A/D采集接口,并使用單片機對A/D的轉換進行控制。
3 傳感器仿真分析
3.1 仿真模型
基于Ansoft Maxwell電磁仿真軟件,筆者建立了傳感器測量系統有限元模型,其中,液壓缸結構與永磁環磁場分布基本對稱,對模型做了軸對稱處理[17]。
傳感器仿真模型如圖5所示。

圖5 傳感器仿真模型
模型的主要參數如下:液壓缸長600 mm,活塞行程560 mm,缸筒厚度15 mm,磁導率500 H/m,永磁環外徑110 mm,內徑60 mm,A、B磁環高為25 mm,沿X軸方向充磁,材料為NdFe35釹鐵硼,矯頑力HC為-8.9×105A/m,磁阻元件根據TMR9002傳感器實際參數設置,沿缸筒外壁直線排列,間隔相等,數量若干。為方便后續描述,將永磁環分為A、B磁環表示。
仿真選用瞬態磁場求解器,其矢量磁位A滿足的場方程如下:

(1)
在以永磁環自身坐標分析時,偏時間導數變成全時間導數,運動方程為:
(2)
式中:HC—永磁體的矯頑力;ν—永磁環的運動速度;A—磁矢位;JS—源電流密度。
設置運動的時間步為0.5 s,終止時間50 s,運動速度ν=11.2 mm/s,求解器便可根據式(1,2)解算出有限元模型任一時間段內任一點的磁場強度。
3.2 磁場分析
永磁環運動至25 s時,其附近區域的磁通密度云圖和磁力線分布圖如圖6所示。

圖6 磁通密度云圖與磁力線分布圖
從圖6可以看出:在永磁環附近,由于缸筒的導磁作用,液壓缸內部磁場強度明顯高于外部磁場,但缸筒外仍有部分漏磁,滿足磁阻元件的檢測要求;永磁環外磁路共有3條路徑,方向分別為A磁環N極到A磁環S極,B磁環N極到A磁環S極,以及B磁環N極到B磁環S極;磁力線在A磁環的S極和B磁環的N極處最為密集,此處磁場強度最大,且由兩磁極向兩端逐漸減小;在永磁環上下兩側,磁力線形狀基本相同,兩側磁場強度相等,方向相反,由此可推測,在永磁環經過某一磁阻元件時,其輸出信號應為關于某點近似對稱的曲線。
3.3 輸出信號分析
筆者以未經信號電路處理的傳感器輸出信號進行分析,單個磁阻元件的輸出曲線及位置示意圖如圖7所示。
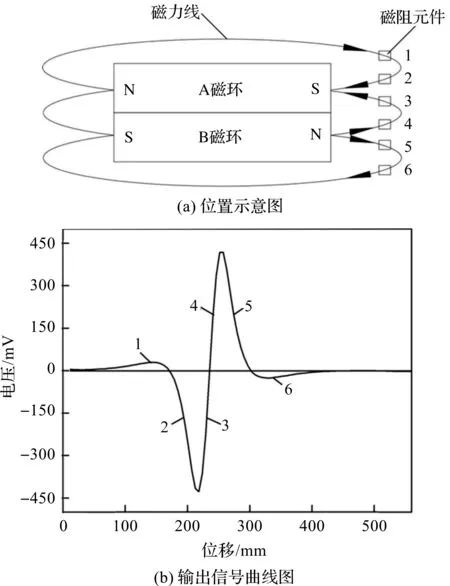
圖7 單個磁阻元件輸出曲線及位置示意圖
圖7(a)中:1~6表示磁阻元件與永磁環的相對位置,箭頭表示磁場方向。永磁環由遠及近靠近磁阻元件時,磁阻元件首先處于1位置,磁場方向為正,此時磁阻元件距離永磁環磁極較遠,輸出幅值較小,對應圖7(b)中的1段曲線;
磁阻元件處于2,3位置時,靠近A磁環S極,磁場方向為負,磁場強度先增大后減小,輸出幅值較大,達到負向峰值,對應2,3段曲線;
磁阻元件處于4,5位置時,靠近B磁環N極,磁場方向為正,磁場強度先增大后減小,達到正向峰值,對應4,5段曲線;
當永磁環遠離該磁阻元件時,元件處于6位置,磁場方向為負,輸出幅值較小;
曲線各零點表示磁場方向與磁阻元件的敏感方向垂直時元件輸出為0,其中,兩峰值間的零點表示磁阻元件位于A、B磁環連接處。曲線正、負峰值相等,關于3,4段曲線零點近似對稱,與磁場分析結果一致。
3.4 位移計算方法
由圖7可知,正、負峰值間曲線線性度較高,該段曲線為磁阻元件的有效線性工作區,筆者采用多個磁阻元件的有效線性工作區疊加的方式來測量永磁環位移。
單片機計算永磁環位移的程序邏輯如下:
(1)前提條件。永磁環作全量程位移,對各位置磁阻元件輸出信號進行采集,完成數據初始化,因單片機采集到的信號經過放大與偏置,需將信號還原,使程序根據磁阻元件的初始輸出數據進行判斷;
(2)一組磁阻元件的初始輸出如圖8所示。
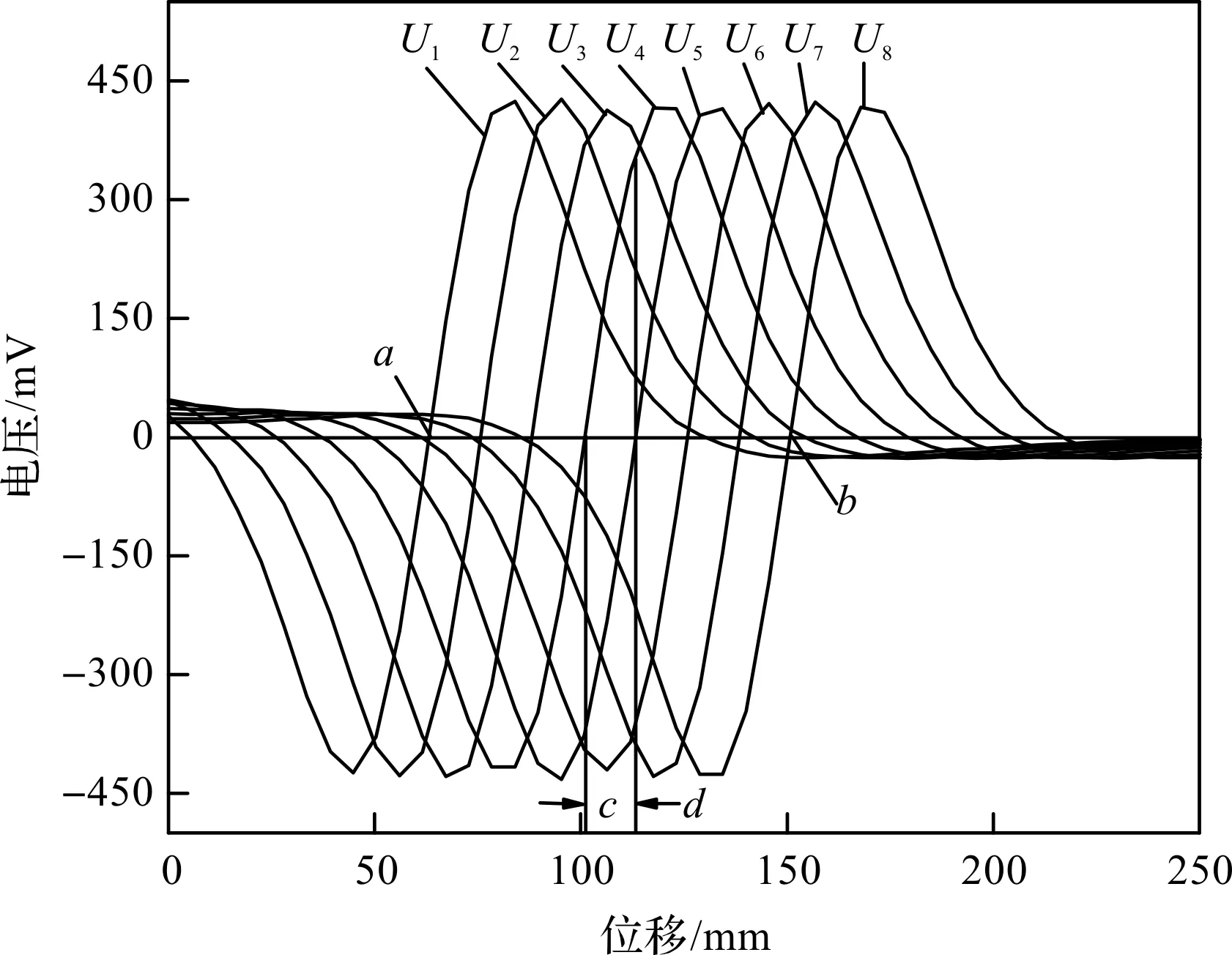
圖8 一組磁阻元件初始輸出
(3)完成初始化后,測量開始。當永磁環運動至該組傳感器測量范圍時,單片機采集到8路磁阻元件的初始輸出信號,即U1—U8;
(4)確定永磁環的位移區間。將a、b零點之間的距離以其他曲線峰值之間的零點為界限分為7個小區間,永磁環運動至c段區間時,U4為正,U5為負,同理,永磁環位于其他區間時,相鄰兩個傳感器元件輸出正負不同,因此當程序判斷Ui>0,Ui+1≤0時,便可確定永磁環所處區間;
(5)將(0,0),(d,Ux)兩點代入y=ax+b中,求得每個元件的線性公式,其中Ux為Ui+1=0時Ui的取值,d為兩相鄰磁阻元件的間隔距離;
(6)將Ui代入永磁環所在小區間的線性公式,即可解得永磁環在該小區間的位移。
總位移表達式為:
L=d×(i-1)+Lx
(3)
式中:L—永磁環的總位移;Lx—永磁環在小區間內的位移。
每組元件測量范圍為a零點至b零點,量程7×dmm,多組元件工作時總量程為:(N-1)×d,N表示磁阻元件總數量,安裝時,首個磁阻元件的安裝位置需與永磁環位移為零時A、B磁環的連接處平齊。
為得出磁阻元件的最佳間隔距離d,引入線性度的概念。線性度即非線性誤差為實際輸出曲線和擬合直線之間的偏差。其計算公式為:
(4)
式中:δ—線性度;ΔUmax—最大非線性絕對誤差;U—輸出滿量程,即兩峰值的差值。
以0.5 mm為增量,筆者通過MATLAB軟件求出元件間隔d為9 mm~14 mm時,線性公式對應曲線的線性度以及誤差小于1 mm時曲線的線性度要求,如表1所示。
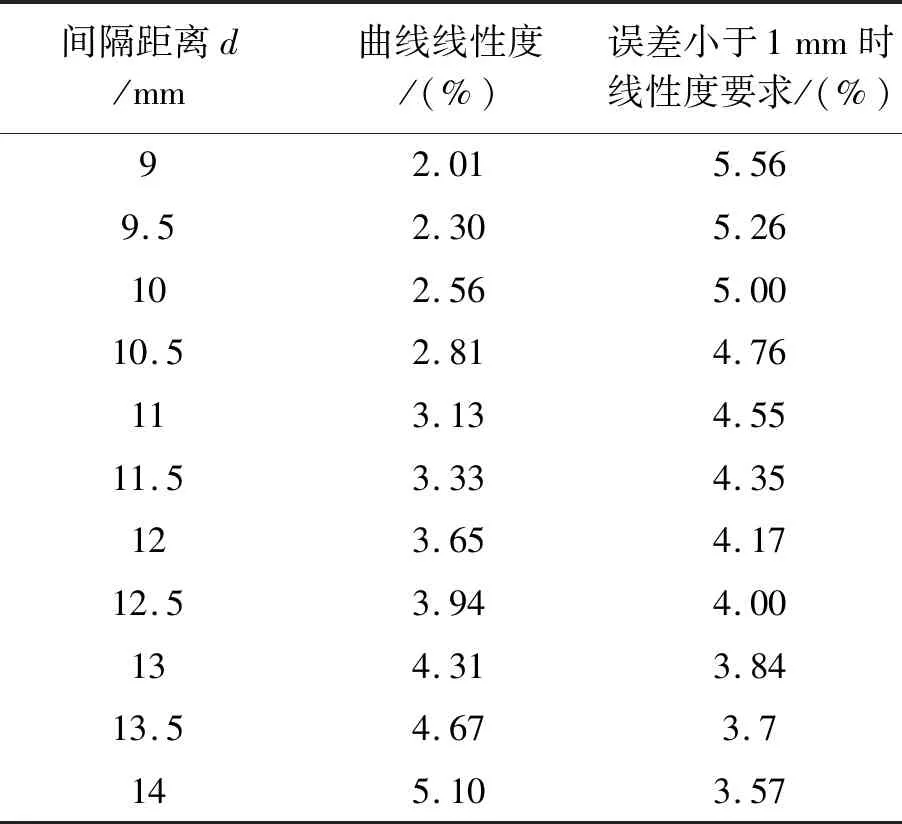
表1 不同間隔時曲線線性度
由表1可知,隨著間隔距離d增大,曲線線性度逐漸減小,間隔距離為12.5 mm時,曲線線性度剛好不超過誤差小于1 mm時的線性度要求。
因此,在滿足線性度要求的前提下,為避免間隔距離過小,造成磁阻元件的浪費,筆者選擇元件間隔距離d=12.5 mm。
3.5 缸筒對檢測結果影響
筆者通過改變缸筒磁導率和厚度參數研究了缸筒變化對磁阻元件輸出信號的影響。磁場強度超過TMR9002的工作范圍時,選用其他型號的TMR磁阻元件。
缸筒材料一般為鑄鐵、鑄鋼等,鑄鐵磁導率為200 H/m~400 H/m,鑄鋼稍高一些,常用的45號鋼磁導率可達600 H/m,不同處理方式下材料磁導率不同,但大都不超過1 000 H/m[18]。
筆者以缸筒厚度15 mm為前提,將磁導率μ分別設為50 H/m,100 H/m,200 H/m,500 H/m,1 000 H/m,得到不同磁導率下磁阻元件的輸出信號曲線,如圖9所示。
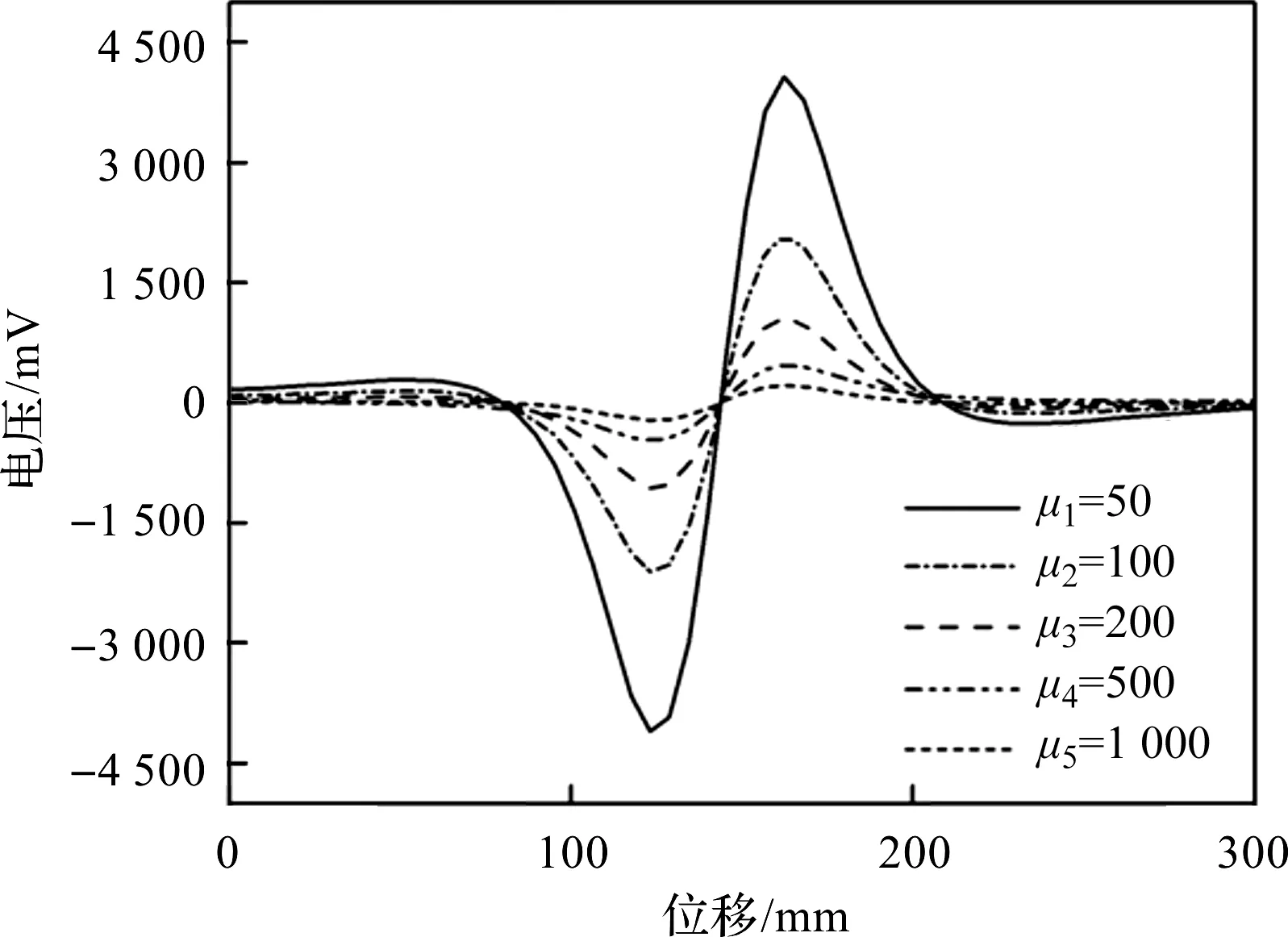
圖9 不同磁導率下輸出信號
通過圖9可知:當磁導率取值逐漸增大時,磁阻元件輸出幅值明顯降低,正、負峰值由4 000 mV降至200 mV。5條曲線的變化趨勢相同,各零點與取得峰值的位置未變化。
以磁導率500 H/m為前提,筆者將厚度h分別設為15 mm,20 mm,25 mm,30 mm,得到不同厚度下磁阻元件的輸出信號曲線,如圖10所示。
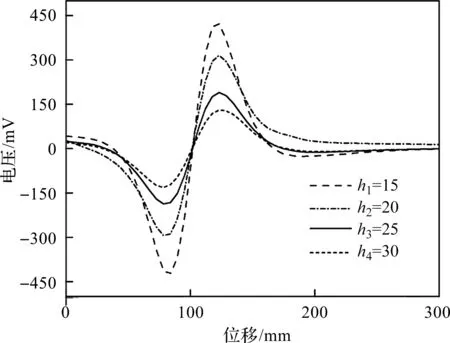
圖10 不同厚度下輸出信號
通過圖10可知:當缸筒厚度逐漸增加時,傳感器元件輸出幅值降低,正、負峰值由420 mV降至130 mV。各曲線變化趨勢相同,正、負峰值間零點與取得峰值的位置未變化,但缸筒厚度改變會使磁路路徑發生變化,因此,正、負峰值前后零點位置均有較小變化。
結合圖9、圖10,缸筒磁導率與厚度變化時,磁阻元件的有效線性工作區對應位移區間長度不變。因此,檢測缸筒材料與厚度不同的液壓缸時,完成數據初始化后,無需改變磁阻元件的間隔,仍可按照原有程序參數計算位移,提高了傳感器的使用效率。
4 實驗測試
由位移計算的方法可知,磁阻元件輸出兩峰值間曲線的線性度是影響傳感器測量精度的關鍵因素,因此,筆者利用實驗裝置對磁阻元件實際輸出曲線的線性度進行分析。
實驗裝置如圖11所示。
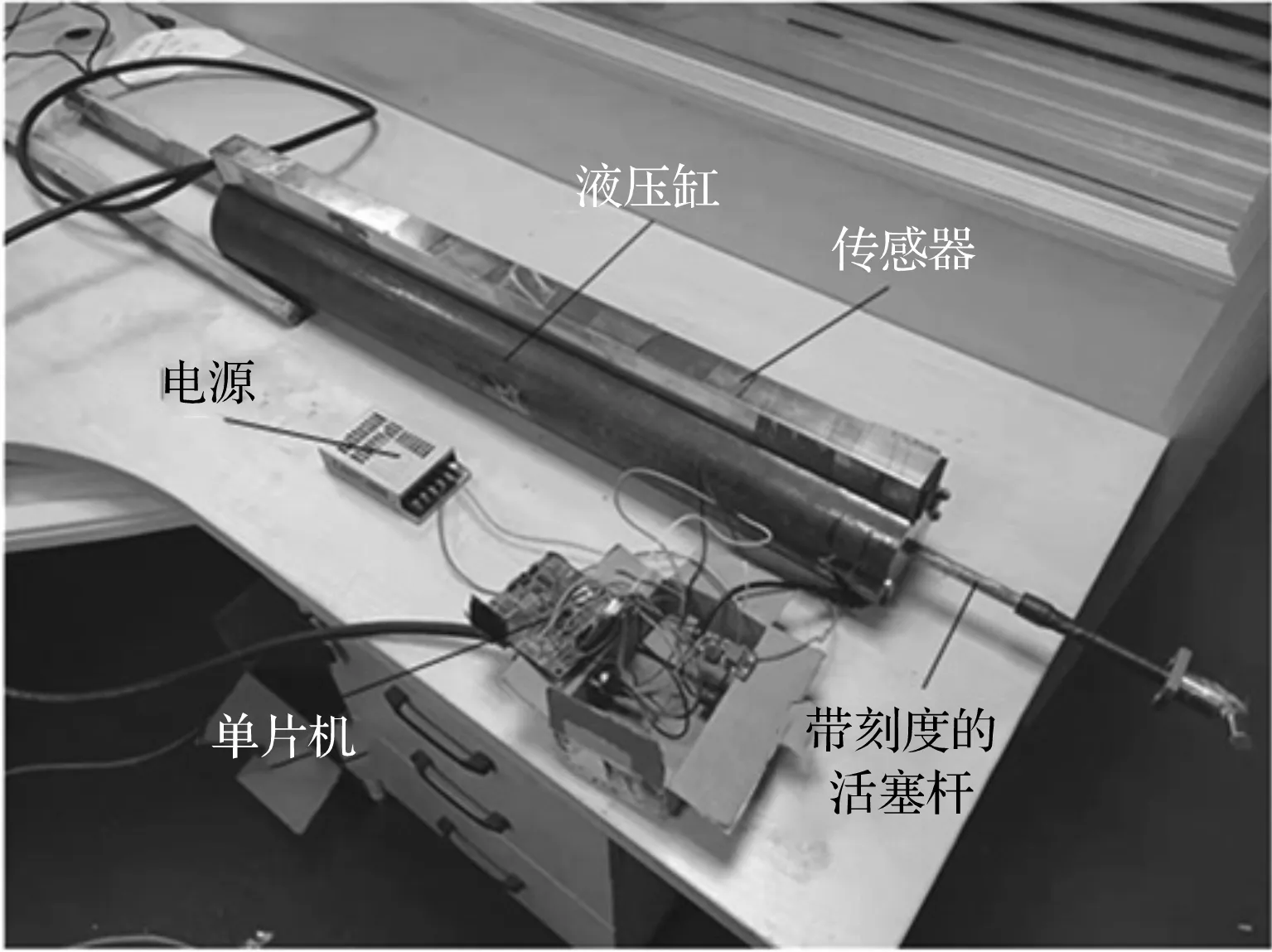
圖11 實驗裝置
除缸筒磁導率外,各項參數與仿真模型一致,活塞桿帶有精度1 mm的刻度尺,單片機液晶顯示器顯示磁阻元件的電壓輸出。
筆者使液壓缸作全量程位移,每5 mm對液晶顯示器的數值進行記錄,重復測量3次,求各點的輸出平均值。
筆者將其中一個磁阻元件的數據繪制成曲線圖,并和理想的線性擬合曲線進行對比,如圖12所示。
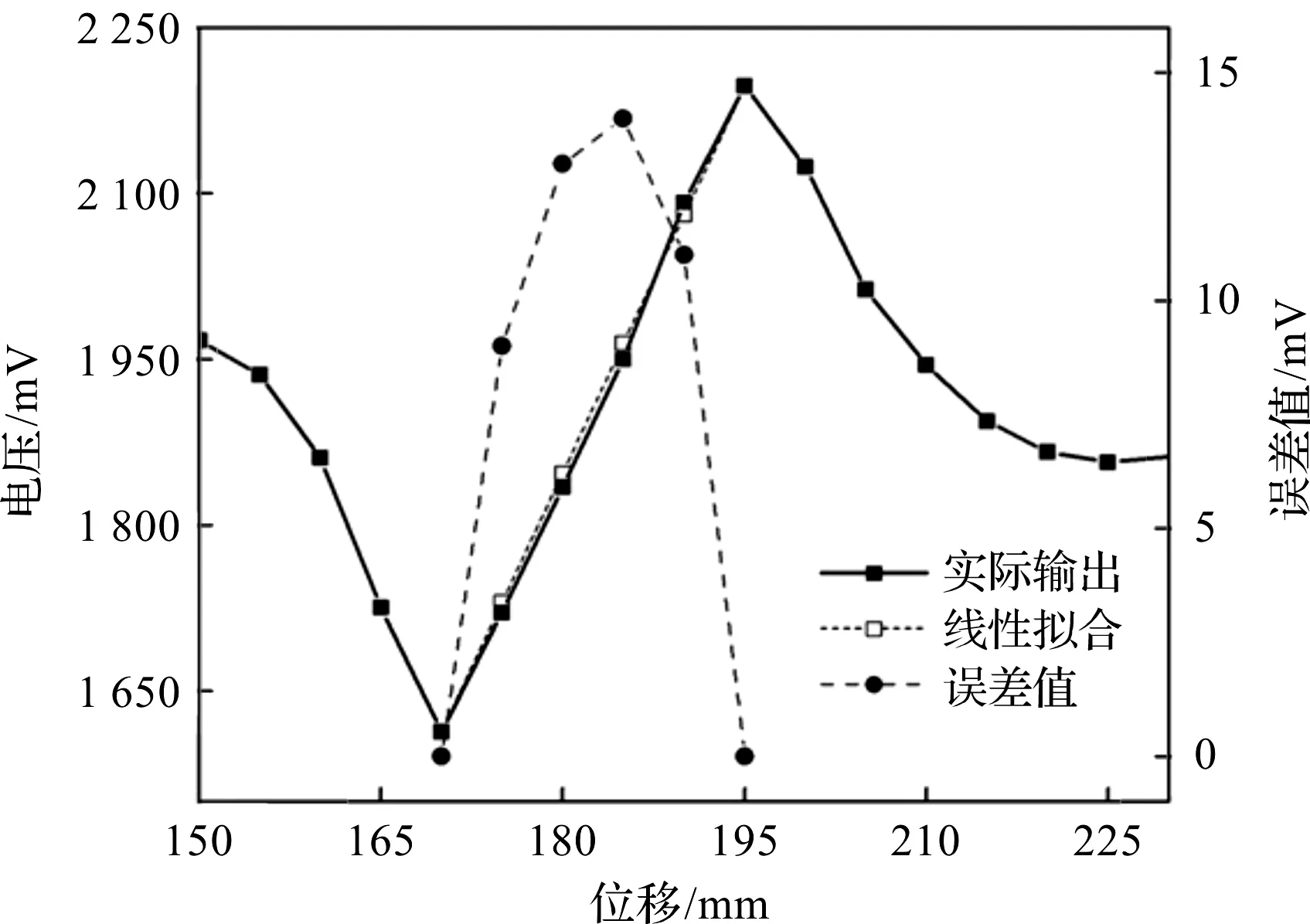
圖12 磁阻元件的線性度
通過圖12可知:輸出滿量程為584 mV,最大非線性絕對誤差為14 mV,根據式(4)求得該磁阻元件線性區域的線性度δ=2.39%。線性區域對應位移區間長度25 mm,因此,永磁環每移動1 mm磁阻元件產生23.36 mV的電壓輸出,由此得出,當線性區域的最大非線性誤差不超過23.36 mV,即線性度不超過4%時,傳感器理論測量誤差小于1 mm,精度可達0.16%,該磁阻元件線性度滿足要求。
傳感器位移測量結果是由單片機根據磁阻元件輸出的電壓信號計算得出,在該方法中,輸入量為磁阻元件電壓信號,其最小變化單位為1 mV,輸出量為永磁環位移量。在該磁阻元件的線性區間內,每相鄰兩個采樣點之間的曲線斜率不同,計算傳感器分辨率時,應采用使輸出量產生階躍變化的輸入量中的最大變化值即斜率最小的一段曲線作為衡量指標。
由圖12可以求得,在斜率最小的曲線段內,每1 mV電壓變化對應永磁環位移為0.045 mm,即該磁阻元件可分辨的最小位移為0.045 mm,考慮各磁阻元件的差異性,傳感器整體可分辨的最小位移可達0.05 mm,傳感器量程600 mm,分辨率為0.008 3%。傳感器靈敏度由單片機程序設定,可通過改變程序參數調節靈敏度數值大小。
為驗證傳感器的重復性,筆者在該磁阻元件的線性輸出區域,即170 mm~195 mm范圍內,測試永磁環不同位置下元件的電壓信號。
試驗3次后,得到測試的結果如圖13所示。
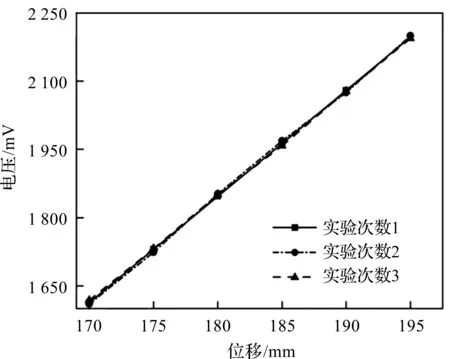
圖13 磁阻元件重復性測試結果
由圖13可知,3次實驗磁阻元件輸出信號的重復誤差較小,所設計的傳感器重復性較好,能夠確保其在實際測試系統中的使用。
5 結束語
筆者設計了一款液壓缸用外置式磁感應位移傳感器,運用Ansoft Maxwell軟件分析了其工作磁場及磁阻元件輸出信號,基于分析結果提出了位移計算方法,研究了缸筒磁導率和厚度對測量結果的影響,并通過實驗對仿真結果及傳感器各項性能指標進行了驗證分析。
研究結論如下:
(1)傳感器磁場分布規律與磁阻元件輸出信號變化規律一致,符合永磁環雙環結構的設計預想;
(2)磁阻元件排列的最佳間隔距離為12.5 mm,缸筒磁導率與厚度變化不改變磁阻元件的有效線性工作區對應位移區間的長度,因此,傳感器可直接測量缸筒材質與厚度不同的液壓缸;
(3)通過實驗求得,磁阻元件實際輸出曲線的線性度為2.39%,滿足測量誤差小于1 mm對線性度的要求,精度為0.16%,可分辨的最小位移為0.05 mm,分辨率為0.008 3%,具有良好的重復性。
在后續的研究當中,筆者將對永磁環尺寸對傳感器測量結果的影響進行分析,并不斷提高磁阻元件輸出信號的線性度,優化位移算法,提升磁感應位移傳感器的各項性能指標,爭取早日實現其產品化。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2016年1期)2016-01-11 16:53:24