雷達(dá)復(fù)雜環(huán)境下的群目標(biāo)快速分辨方法
2022-06-27 01:33:22劉志棟李曉花汪潤(rùn)生黃曉兵張景東張榮斌
測(cè)控技術(shù) 2022年6期
劉志棟, 李曉花, 汪潤(rùn)生, 黃曉兵, 張景東, 張榮斌
(1.中國(guó)人民解放軍63615部隊(duì),新疆 庫(kù)爾勒 841001; 2.中國(guó)人民解放軍63610部隊(duì),新疆 庫(kù)爾勒 841001)
遠(yuǎn)程打擊武器為了完成突防,在不同的階段(助推段、末助推段、中段、再入段)會(huì)分離和釋放出不同的物體[1]。尤其是彈道中段,遠(yuǎn)程打擊武器目標(biāo)的一個(gè)重要特征就是目標(biāo)數(shù)量不再單一,而是形成包括戰(zhàn)斗部、碎片和各種誘餌的目標(biāo)群,它們以大致相同的速度沿遠(yuǎn)程打擊武器的預(yù)定彈道慣性飛行,構(gòu)成復(fù)雜的群目標(biāo)環(huán)境[2]。群目標(biāo)回波密集,相對(duì)速度小,回波信號(hào)幅度起伏大,檢測(cè)困難。
因此需要對(duì)群目標(biāo)分辨技術(shù)進(jìn)行進(jìn)一步分析研究,以提升雷達(dá)對(duì)彈道群目標(biāo)的及早分辨能力,為導(dǎo)彈預(yù)警系統(tǒng)提供更加及時(shí)準(zhǔn)確的引導(dǎo)信息,達(dá)到快速發(fā)現(xiàn)攔截摧毀目標(biāo)的目的。
對(duì)目標(biāo)進(jìn)行單、群目標(biāo)識(shí)別,是實(shí)現(xiàn)多目標(biāo)快速檢測(cè)的前提。大多數(shù)雷達(dá)采用距離分辨或角度分辨的方法進(jìn)行多目標(biāo)判斷。近年來(lái),基于背景熵的背景平穩(wěn)度評(píng)估方法逐漸發(fā)展成熟并成功應(yīng)用于工程實(shí)踐。
CFAR(Constant False Alarm Rate,恒虛警率)算法能夠有效控制虛警率,在雷達(dá)目標(biāo)檢測(cè)中作用巨大。采用OS(Order Statistic,有序統(tǒng)計(jì))類CFAR檢測(cè)法,雷達(dá)對(duì)相距較近的多目標(biāo)具有良好的分辨能力,可有效減小多目標(biāo)環(huán)境下的遮蔽效應(yīng)。經(jīng)過(guò)多年的發(fā)展,出現(xiàn)了很多具有代表性的OS-CFAR算法,它們都在提高雷達(dá)分辨力方面起到了良好的作用[3]。
對(duì)于遮蔽小目標(biāo)的檢測(cè),多采用先強(qiáng)后弱的步驟,首先對(duì)強(qiáng)目標(biāo)進(jìn)行消除處理,然后再對(duì)小目標(biāo)進(jìn)行檢測(cè),在強(qiáng)目標(biāo)參數(shù)估計(jì)和消除方法上存在一定差異。
1 跟蹤信號(hào)帶寬對(duì)多目標(biāo)分辨的影響
假設(shè)雷達(dá)跟蹤信號(hào)帶寬為5 MHz,距離單元間距為30 m,此時(shí)雷達(dá)對(duì)群目標(biāo)的最小分辨距離為30 m。為了進(jìn)一步提升雷達(dá)對(duì)群目標(biāo)的分辨能力,在跟蹤目標(biāo)時(shí)采用40 MHz信號(hào)帶寬,雷達(dá)距離單元間距則減小為3.75 m。假定彈道群目標(biāo)的相對(duì)速度為10 m/s,增加跟蹤信號(hào)帶寬后的雷達(dá)可以提前2.625 s實(shí)現(xiàn)對(duì)群目標(biāo)的分辨。
因此,增加雷達(dá)跟蹤信號(hào)帶寬可以提高雷達(dá)的距離分辨能力,縮短雷達(dá)對(duì)關(guān)鍵目標(biāo)的捕獲時(shí)長(zhǎng)。
2 基于背景熵的群目標(biāo)判斷
對(duì)群目標(biāo)檢測(cè)若采用噪聲恒虛警,則會(huì)將碎片等構(gòu)成的擴(kuò)展目標(biāo)檢出,導(dǎo)致虛警率上升;若采用雜波恒虛警,由于遠(yuǎn)程打擊武器目標(biāo)群內(nèi)目標(biāo)間相距較近,背景估值偏離噪聲電平,導(dǎo)致弱小目標(biāo)丟失,檢測(cè)概率下降[4]。為保證達(dá)到檢測(cè)指標(biāo)要求,利用背景熵信息進(jìn)行群目標(biāo)判決選擇檢測(cè),在多目標(biāo)環(huán)境下通過(guò)背景濾波技術(shù)實(shí)現(xiàn)鄰近目標(biāo)檢測(cè)。
基于背景熵的背景平穩(wěn)度評(píng)估方法處理流程包括提取參考單元幅度分布、計(jì)算幅度分布的香農(nóng)信息熵。熵值小于指定門(mén)限時(shí)為群目標(biāo)環(huán)境,否則為單目標(biāo)環(huán)境。設(shè)CFAR采用左右各16點(diǎn)作為參考單元,在統(tǒng)計(jì)背景熵時(shí)采用20維的直方圖。取16點(diǎn)幅值最大值vmax,計(jì)算幅值對(duì)應(yīng)在直方圖中的位置為
nBin=[20v/vmax]
(1)
式中:v為參考單元的幅度值。從而建立起背景幅度分布直方圖計(jì)算背景熵:

(2)
將背景熵與指定限進(jìn)行比較。如圖1和圖2所示,當(dāng)參考單元不包含目標(biāo)時(shí)熵值較大,當(dāng)參考單元含有目標(biāo)時(shí)熵值較小。因此,可以通過(guò)計(jì)算參考單元的背景熵判斷目標(biāo)是否處在群目標(biāo)環(huán)境。
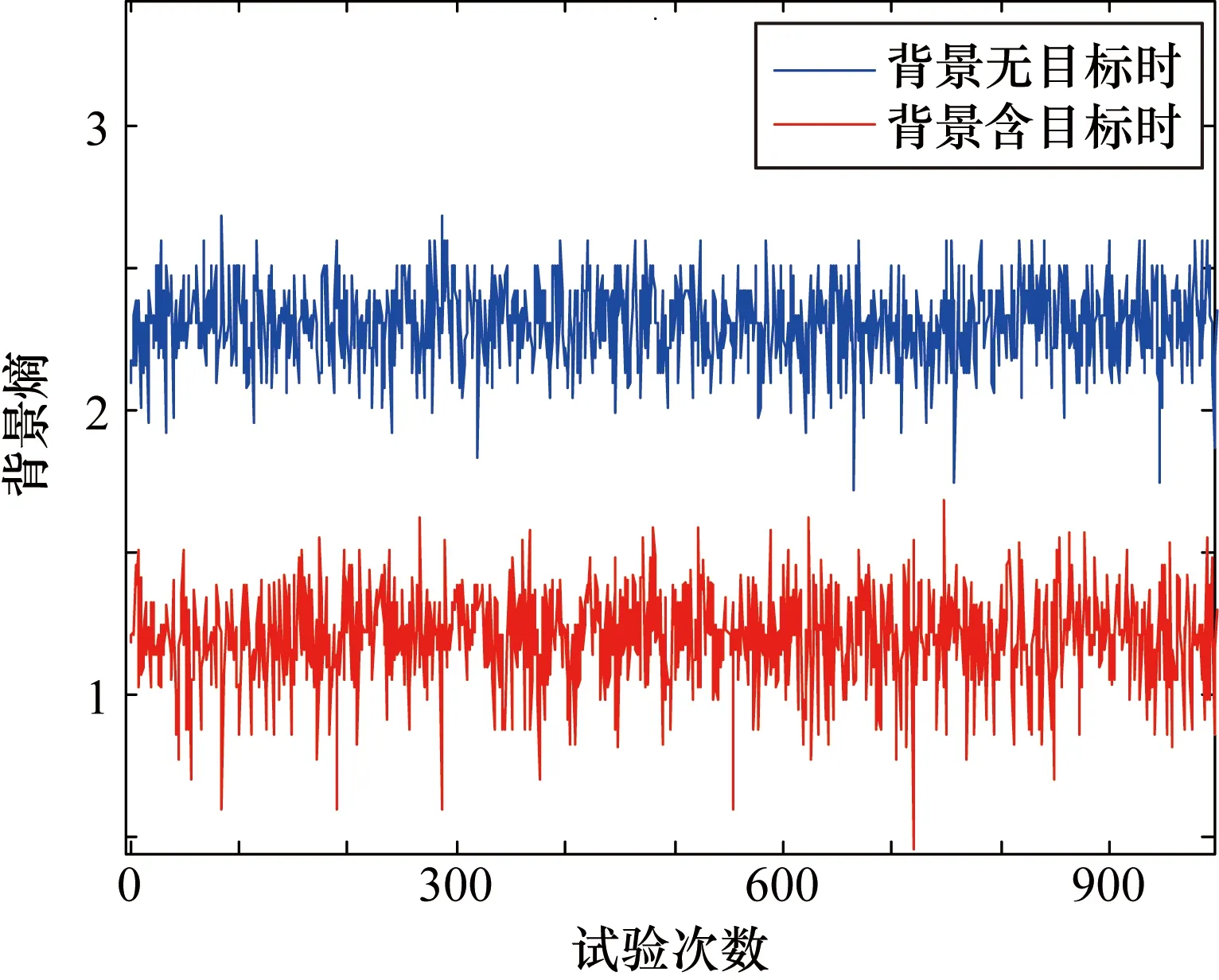
圖1 背景無(wú)目標(biāo)與含目標(biāo)時(shí)的背景熵
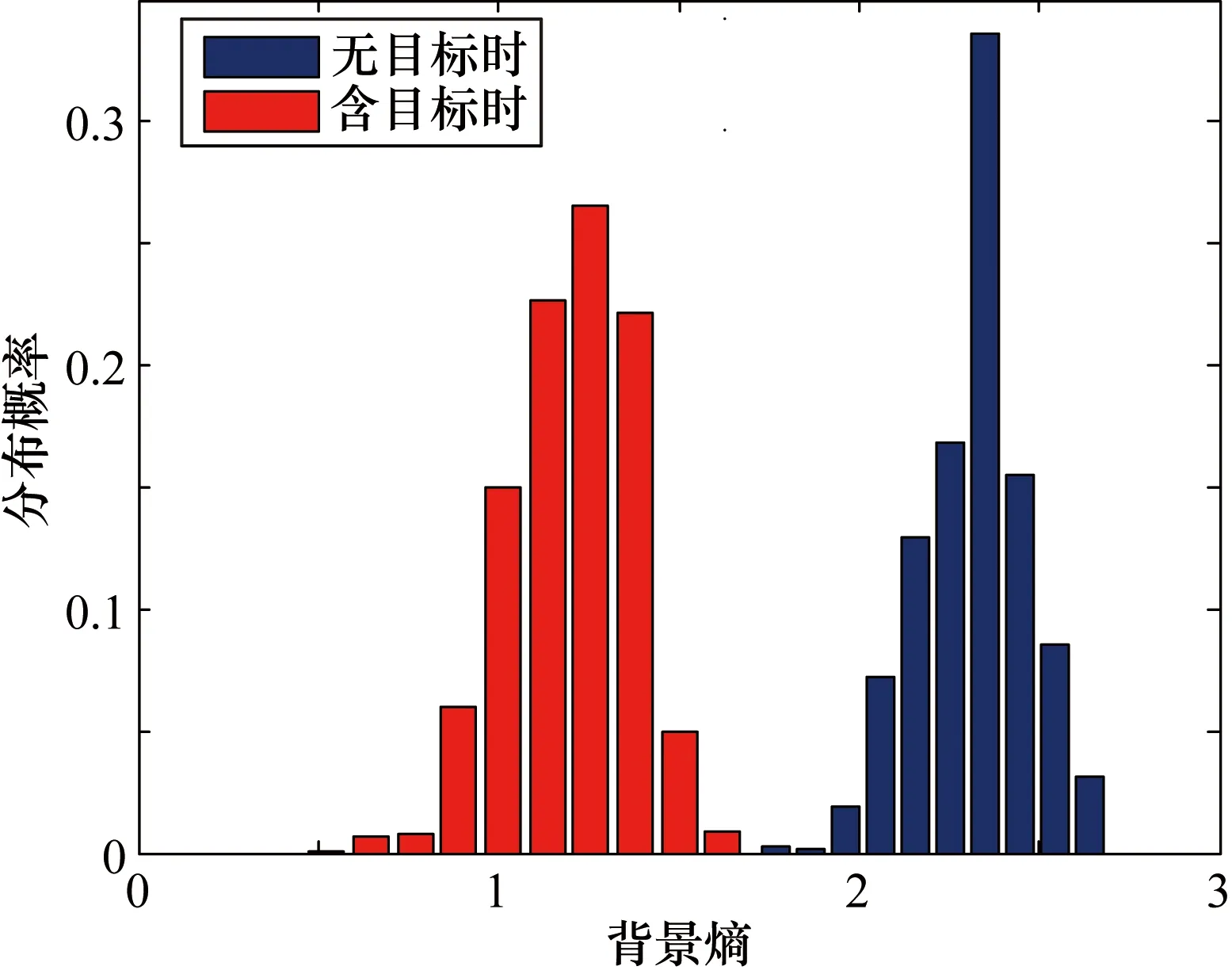
圖2 背景無(wú)目標(biāo)與含目標(biāo)的背景熵分布
基于背景熵濾波的單目標(biāo)和群目標(biāo)檢測(cè)流程框圖如圖3所示。
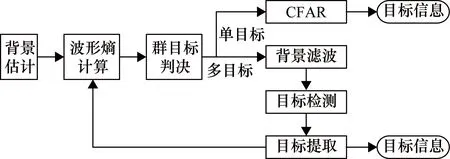
圖3 群目標(biāo)檢測(cè)流程圖
檢測(cè)步驟如下:
① 利用基于背景熵的背景平穩(wěn)度評(píng)估方法,判斷是否處于群目標(biāo)環(huán)境。
② 當(dāng)不存在多目標(biāo)環(huán)境,可采用恒虛警檢測(cè)技術(shù)實(shí)現(xiàn)對(duì)目標(biāo)的檢測(cè)。
③ 存在多目標(biāo)環(huán)境時(shí),利用背景濾波獲得穩(wěn)定背景后進(jìn)行閾值計(jì)算,并對(duì)目標(biāo)進(jìn)行檢測(cè),檢測(cè)出目標(biāo)后利用二次迭代法進(jìn)行二次檢測(cè),然后進(jìn)行下一距離單元的檢測(cè)。
④ 利用雷達(dá)的實(shí)測(cè)數(shù)據(jù)進(jìn)行群目標(biāo)檢測(cè)分析,通過(guò)特定的門(mén)限設(shè)計(jì),得到的單目標(biāo)與群目標(biāo)識(shí)別的準(zhǔn)確率達(dá)到99%。
3 基于OS-CFAR的群目標(biāo)檢測(cè)
對(duì)群目標(biāo)檢測(cè)若采用噪聲恒虛警,則會(huì)將碎片等構(gòu)成的擴(kuò)展目標(biāo)檢出,導(dǎo)致虛警率上升;若采用雜波恒虛警,由于遠(yuǎn)程打擊武器目標(biāo)群內(nèi)目標(biāo)間相距較近,背景估值偏離噪聲電平,導(dǎo)致弱小目標(biāo)丟失,檢測(cè)概率下降。為保證達(dá)到檢測(cè)指標(biāo)要求,采用OS-CFAR進(jìn)行群目標(biāo)檢測(cè)。
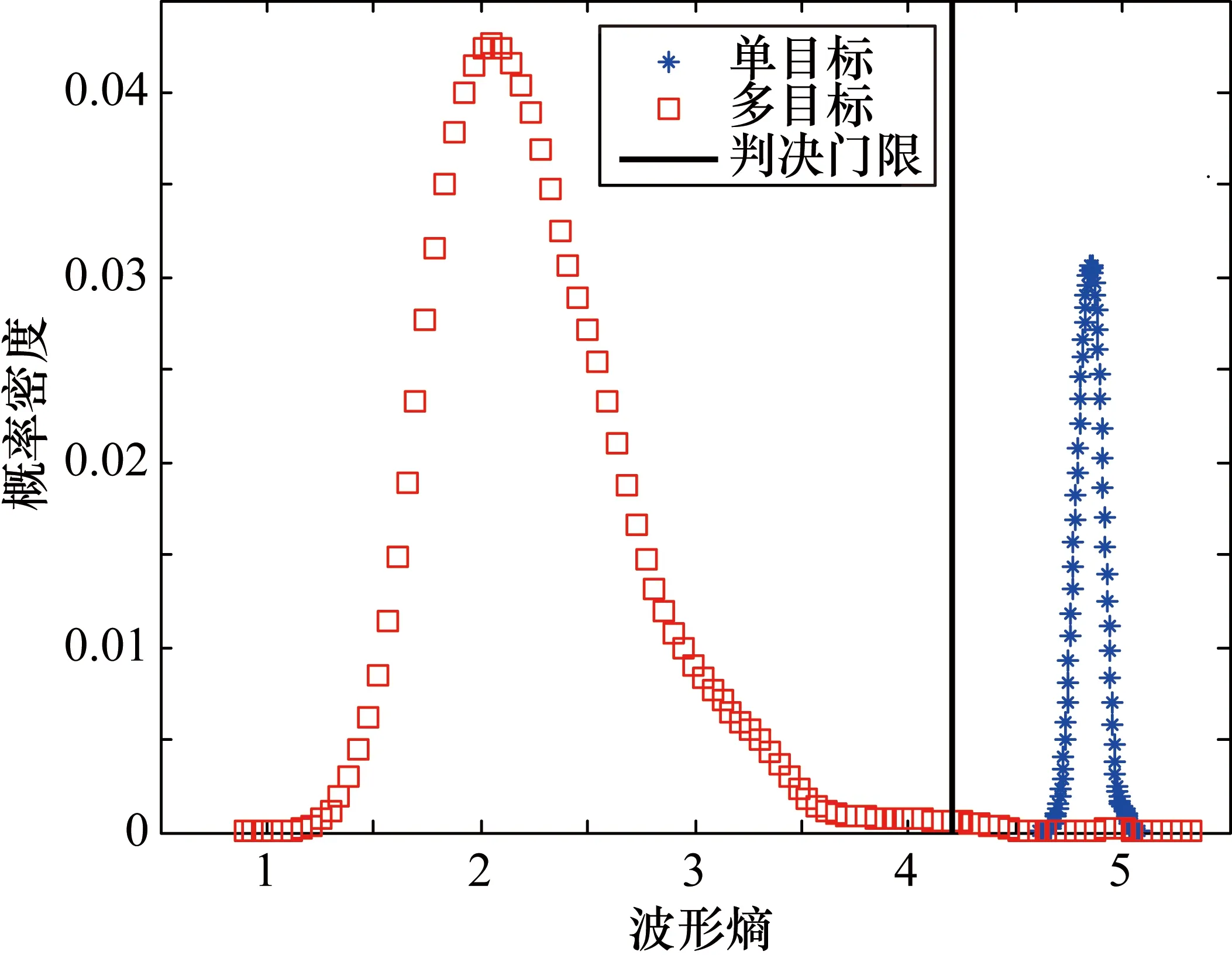
圖4 群目標(biāo)的正確判定
OS-CFAR檢測(cè)器的結(jié)構(gòu)如圖5所示,其中D為檢測(cè)單元樣本,xi(i=1,2,…,R)為參考單元樣本,R為參考單元數(shù)。
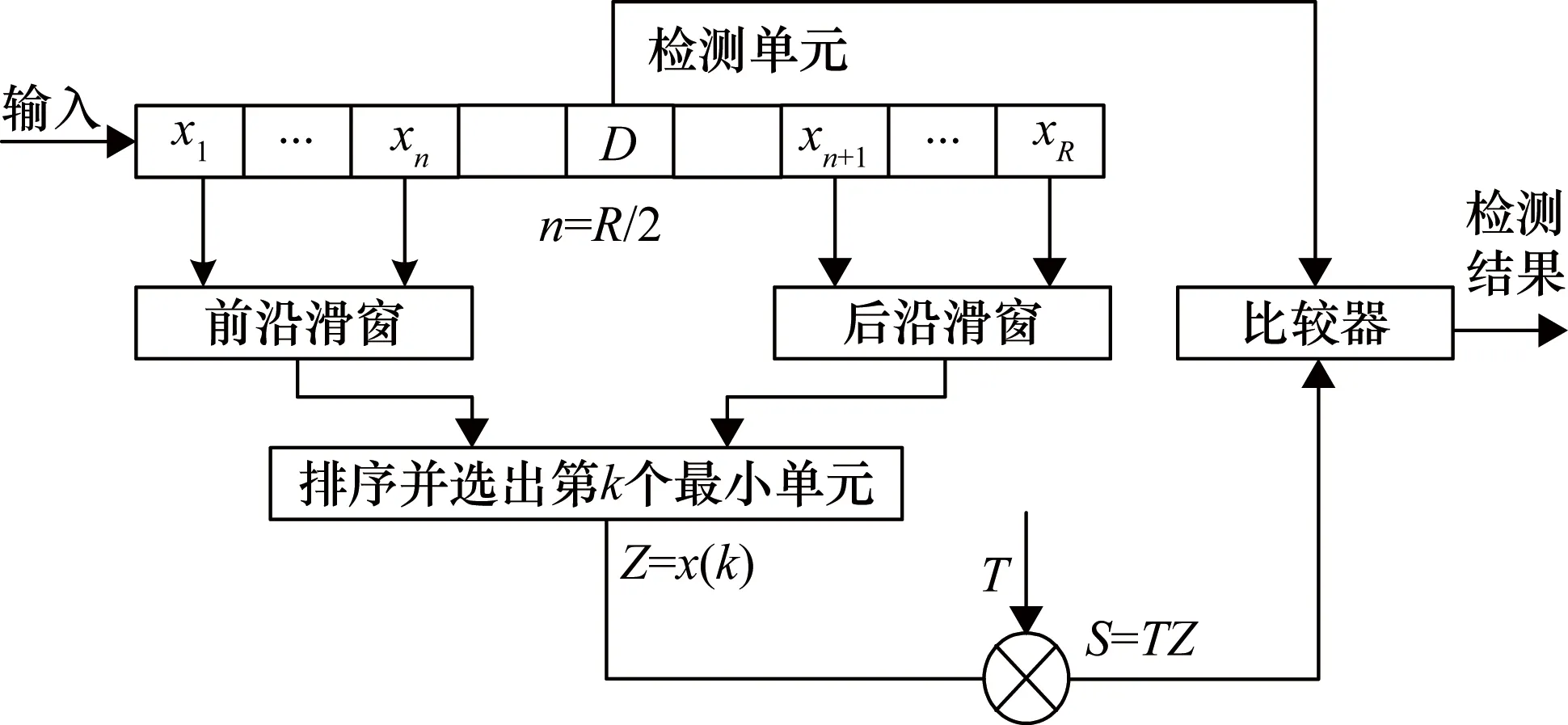
圖5 OS-CFAR檢測(cè)器方框圖
OS-CFAR檢測(cè)器首先對(duì)參考單元樣本按大小做排序處理[5],有
x(1)≤x(2)≤…≤x(R)
(3)
然后取第k個(gè)排序樣本x(k)作為檢測(cè)器對(duì)雜波功率水平的估計(jì)Z,即
Z=x(k)
(4)
則Z是一個(gè)隨機(jī)變量,在均勻雜波背景中其概率密度函數(shù)為
(5)
假設(shè)接收機(jī)噪聲和背景雜波服從高斯分布[6],經(jīng)過(guò)平方律檢波器后,參考單元采樣xi服從指數(shù)分布,其概率密度函數(shù)和分布函數(shù)為[7]
(6)
(7)
式中:
(8)
其中:μ為噪聲功率水平;λ為信號(hào)與噪聲平均功率的比值;H0為不存在目標(biāo)的假設(shè);H1為存在目標(biāo)的假設(shè)。
從上面式(5)~式(8)可得
(9)
則OS-CFAR檢測(cè)器在均勻雜波背景中的檢測(cè)概率和虛警概率分別為
(10)
(11)
當(dāng)跟蹤波束內(nèi)出現(xiàn)密集群目標(biāo)時(shí),采用常規(guī)恒虛警檢測(cè)大信噪比目標(biāo)往往遮蔽小信噪比目標(biāo),使小信噪比目標(biāo)出現(xiàn)漏檢,而采用本文的檢測(cè)方法能夠提升小目標(biāo)的檢測(cè)概率。圖6為當(dāng)大目標(biāo)信噪比為37.3 dB時(shí),小目標(biāo)信噪比從12~21 dB時(shí)的檢測(cè)概率。可以看出,小目標(biāo)信噪比為17.3 dB時(shí),常規(guī)CFAR處理只有0.16的檢測(cè)概率,而采用OS-CFAR處理,檢測(cè)概率可達(dá)0.95。
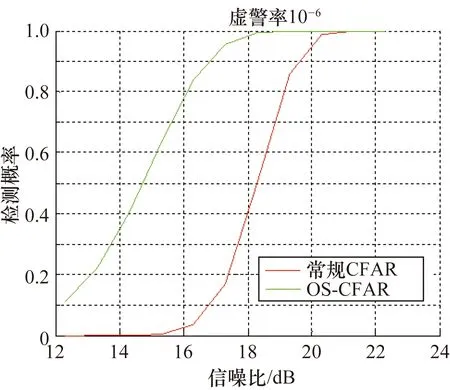
圖6 群目標(biāo)檢測(cè)概率
圖7為運(yùn)載器一級(jí)分離時(shí)的雷達(dá)測(cè)量數(shù)據(jù),圖8為運(yùn)載器二級(jí)分離時(shí)的雷達(dá)測(cè)量數(shù)據(jù),兩圖中點(diǎn)狀點(diǎn)跡是常規(guī)恒虛警檢測(cè)結(jié)果,圈狀點(diǎn)跡是OS-CFAR檢測(cè)結(jié)果。從圖中可以明顯看出常規(guī)檢測(cè)方法漏檢嚴(yán)重,而OS-CFAR檢測(cè)穩(wěn)定連續(xù)。
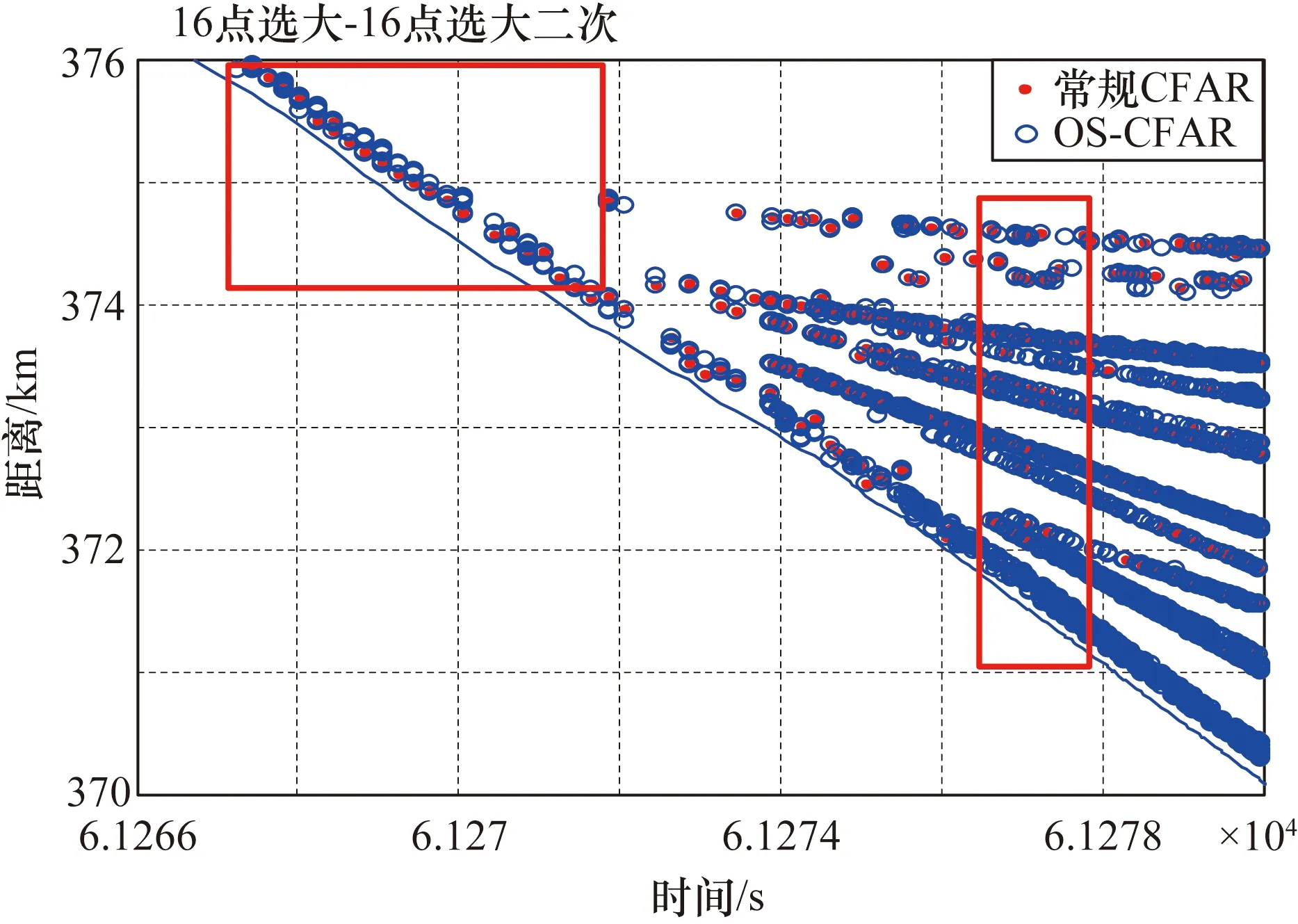
圖7 一級(jí)分離時(shí)OS-CFAR的群目標(biāo)檢測(cè)效果
4 基于Clean算法的遮蔽目標(biāo)檢測(cè)技術(shù)
高速高機(jī)動(dòng)的戰(zhàn)斗部和運(yùn)載器分離過(guò)程中,由于運(yùn)載器比戰(zhàn)斗部幅度強(qiáng)10~30 dB,會(huì)出現(xiàn)大小目標(biāo)遮蔽的場(chǎng)景,導(dǎo)致從距離和多普勒維都難以及時(shí)地判斷其分離狀態(tài)[8],常規(guī)的處理無(wú)法檢測(cè)到被運(yùn)載器遮蔽的戰(zhàn)斗部目標(biāo),如圖9所示。
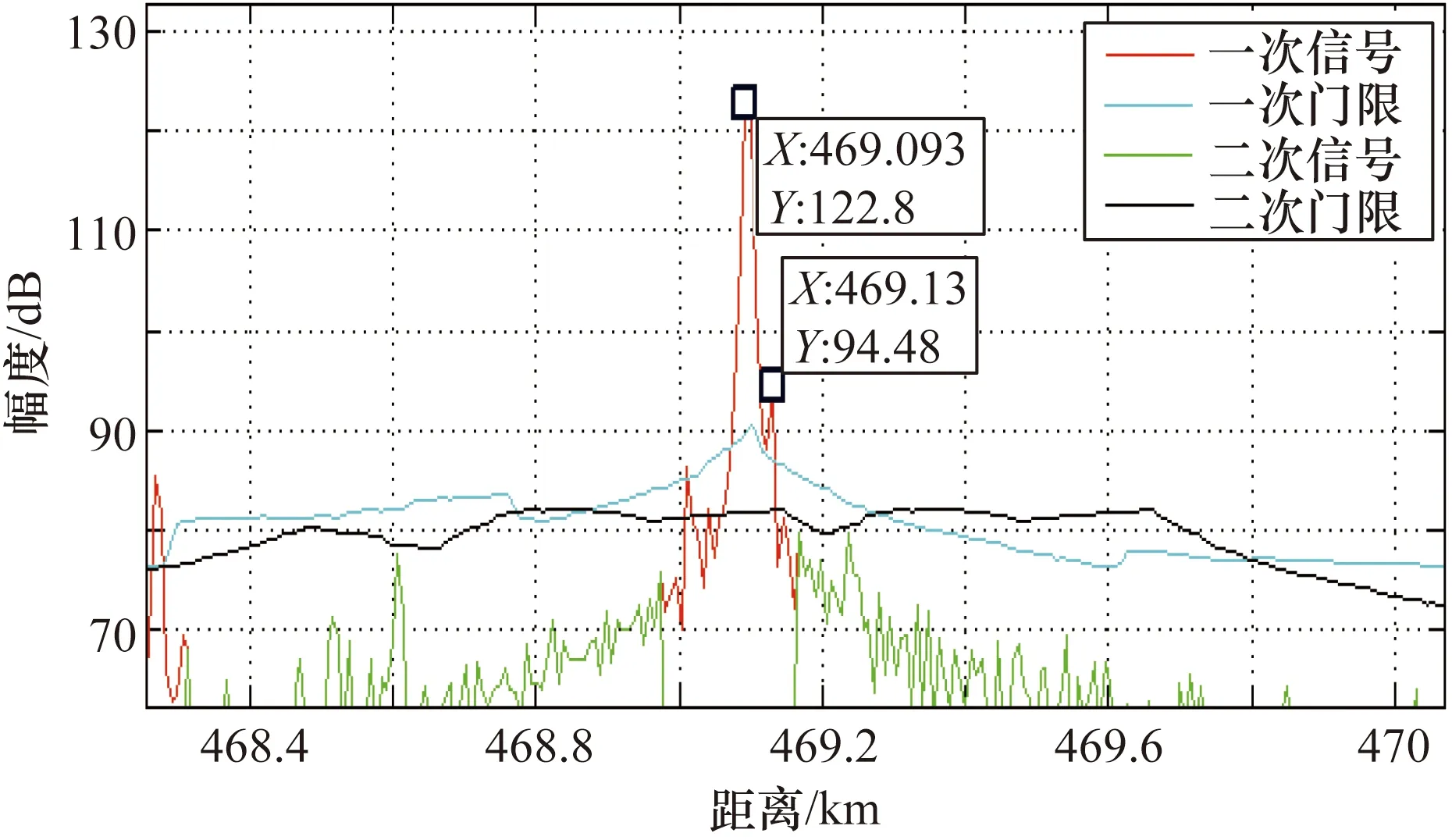
圖9 大小目標(biāo)遮蔽問(wèn)題樣機(jī)處理結(jié)果
針對(duì)該難題,可采用基于多通道聯(lián)合處理和時(shí)頻二維分辨的方法進(jìn)行分離時(shí)刻監(jiān)測(cè)。在戰(zhàn)斗部與運(yùn)載器發(fā)射后的初始階段,雷達(dá)在常規(guī)工作模式下進(jìn)行目標(biāo)搜索截獲,在搜索截獲過(guò)程中采用多通道聯(lián)合處理進(jìn)行大小目標(biāo)遮蔽條件下的群目標(biāo)檢測(cè),在穩(wěn)定跟蹤后采用PD模式對(duì)目標(biāo)進(jìn)行時(shí)頻二維分辨和跟蹤。
對(duì)于常規(guī)跟蹤模式,基于戰(zhàn)斗部和運(yùn)載器在空間角度上存在一定的差異性的特點(diǎn),利用和波束和差波束進(jìn)行聯(lián)合處理,在檢測(cè)到大目標(biāo)之后對(duì)大目標(biāo)進(jìn)行自適應(yīng)對(duì)消,實(shí)現(xiàn)對(duì)大目標(biāo)的Clean處理,在大目標(biāo)用Clean處理后進(jìn)行小目標(biāo)檢測(cè),從而可以較好地緩解大小目標(biāo)遮蔽問(wèn)題[9]。其具體實(shí)現(xiàn)過(guò)程如圖10所示。
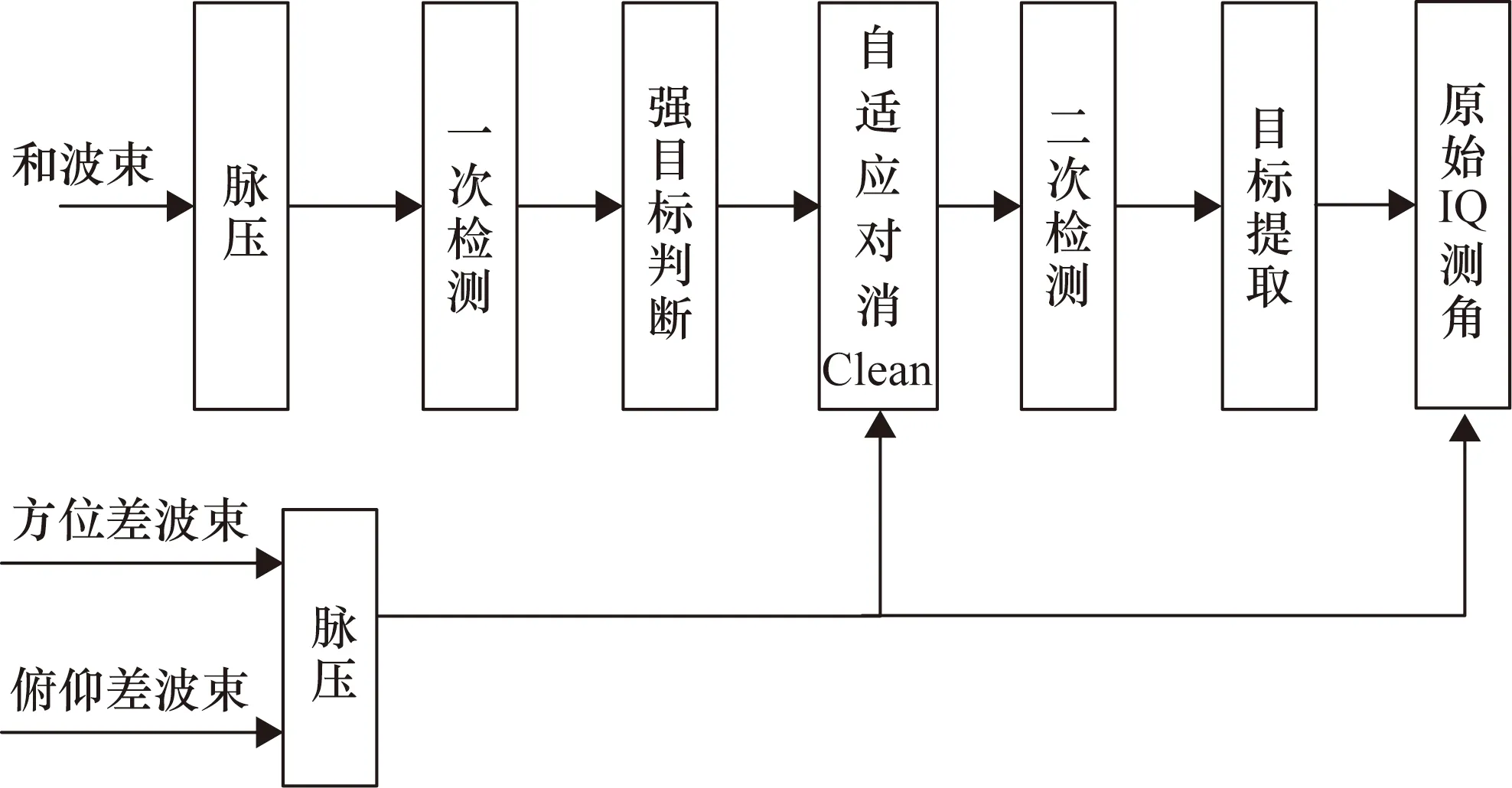
圖10 常規(guī)模式下二次檢測(cè)處理流程
目標(biāo)檢測(cè)步驟如下:
① 根據(jù)和波束的脈壓信息,對(duì)其進(jìn)行一次檢測(cè),對(duì)檢測(cè)到的目標(biāo)進(jìn)行判定,如果出現(xiàn)強(qiáng)目標(biāo)則執(zhí)行步驟②。
② 提取和波束強(qiáng)目標(biāo)對(duì)應(yīng)的距離刻度,找到對(duì)應(yīng)的方位差波束和俯仰差波束,并提取差波束中對(duì)應(yīng)的較大值。
③ 采用自適應(yīng)對(duì)消Clean算法,用和波束上強(qiáng)目標(biāo)對(duì)應(yīng)的數(shù)據(jù)減去步驟②中提取的差波束值,得到一組新的數(shù)據(jù)。
④ 對(duì)新數(shù)據(jù)做二次檢測(cè),提取相應(yīng)的目標(biāo)。
在穩(wěn)定跟蹤后采用PD模式對(duì)目標(biāo)進(jìn)行時(shí)頻二維分辨和跟蹤,采用插值的方式實(shí)現(xiàn)多普勒維的分辨。
如圖11所示,當(dāng)目標(biāo)距離較近時(shí)可以實(shí)現(xiàn)大目標(biāo)的Clean處理和弱小目標(biāo)的檢測(cè),將目標(biāo)分辨從40~50 m降低到10~14 m,較好地解決了大小目標(biāo)遮蔽下的目標(biāo)檢測(cè)問(wèn)題。
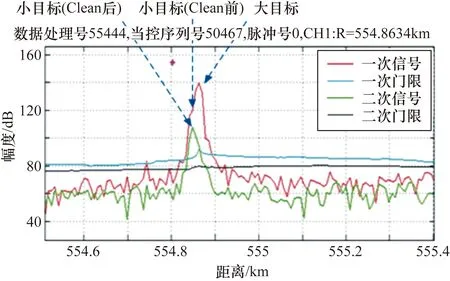
圖11 Clean處理前后對(duì)比
圖12為凝聚后點(diǎn)跡的比較,在大小目標(biāo)相距10~14 m時(shí)常規(guī)處理已經(jīng)無(wú)法分辨兩個(gè)目標(biāo),而新算法能夠穩(wěn)定地實(shí)現(xiàn)兩目標(biāo)的分辨。
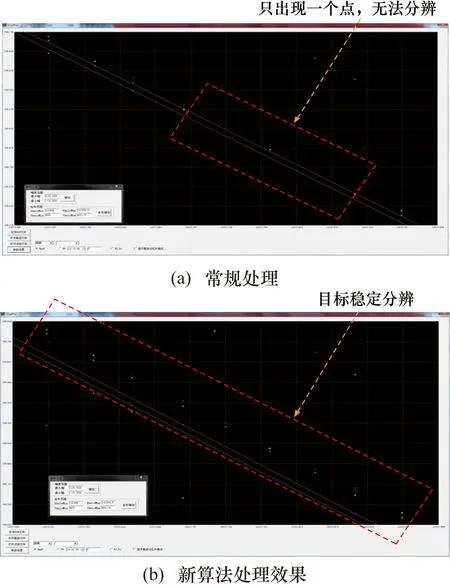
圖12 點(diǎn)跡對(duì)比
時(shí)頻二維聯(lián)合分辨試驗(yàn)結(jié)果如圖13所示,采用64脈沖的PD模式,帶寬10 MHz,運(yùn)載器和戰(zhàn)斗部在距離3 m、速度3 m/s時(shí)可實(shí)現(xiàn)分離狀態(tài)檢測(cè)。

圖13 PD模式下的時(shí)頻分析
5 結(jié)束語(yǔ)
本文通過(guò)提高雷達(dá)跟蹤信號(hào)帶寬,可以有效減小雷達(dá)分辨距離,提高雷達(dá)對(duì)目標(biāo)的盡早發(fā)現(xiàn)能力。利用基于背景熵的背景平穩(wěn)度評(píng)估方法能夠有效提高其對(duì)單(群)目標(biāo)的檢出概率,為雷達(dá)目標(biāo)進(jìn)一步檢測(cè)提供策略依據(jù)。當(dāng)跟蹤波位內(nèi)出現(xiàn)密集群目標(biāo)時(shí),采用常規(guī)恒虛警檢測(cè)大信噪比目標(biāo)往往會(huì)遮蔽小信噪比目標(biāo),使小信噪比目標(biāo)出現(xiàn)漏檢,而采用本文的OS-CFAR算法能夠有效提升小目標(biāo)的檢測(cè)概率。所述自適應(yīng)對(duì)消Clean算法可對(duì)目標(biāo)進(jìn)行時(shí)頻二維分辨和跟蹤,可以較好地解決大小目標(biāo)遮蔽下的目標(biāo)檢測(cè)問(wèn)題,在常規(guī)處理已經(jīng)無(wú)法分辨時(shí)實(shí)現(xiàn)近距離大小目標(biāo)的分辨。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12