雙泵驅(qū)動潛孔鉆車自適應(yīng)調(diào)平行走液壓系統(tǒng)設(shè)計(jì)分析
2022-06-29 00:43:32舒慧建李勇濤李雪龍祝燕清
河南科技 2022年11期
舒慧建 李勇濤 李雪龍 祝燕清


摘 要:潛孔鉆機(jī)是目前露天礦山在爆破孔鉆鑿中使用廣泛的設(shè)備,其具有工作效率高、使用成本低、易于維護(hù)保養(yǎng)等特點(diǎn),市場需求量大。目前,潛孔鉆機(jī)行走和履帶調(diào)平液壓系統(tǒng)分別設(shè)置在行走和油缸動作兩個相對獨(dú)立的液壓模塊中。鉆機(jī)在行走爬坡過程中,操作員需要先進(jìn)行停車操作,將油路切換到油缸控制回路,并手動調(diào)節(jié)履帶的調(diào)平角度以降低鉆車的重心。本研究在現(xiàn)有潛孔鉆車的基礎(chǔ)上,提出一種履帶自適應(yīng)調(diào)平行走液壓系統(tǒng),在鉆車爬坡過程中實(shí)現(xiàn)自動控制履帶的調(diào)平角度,保證其在平路行走時,左右履帶對起伏道路具有自適應(yīng)功能。
關(guān)鍵詞:潛孔鉆車;AMEsim;自適應(yīng)調(diào)平行走;液壓
中圖分類號:TD41 ? ? ?文獻(xiàn)標(biāo)志碼:A ? ? 文章編號:1003-5168(2022)11-0030-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.11.006
Design and Analysis of Self-adjusting Parallel Tramming Hydraulic System Based on Double Pump Driven DTH Drill Rig
SHU Huijian1? ? LI Yongtao2? ? LI Xuelong3? ? ZHU Yanqing2
(1.Mechanical and Electrical Engineeriug College of Quzhou College of Technology,Quzhou 324000,China;
2.Zhejiang Kaishan Heavy Industry Co.Ltd.,Quzhou 324000,China;3.Zhejiang Kaishan Drilling Tools Co.Ltd.,Quzhou 324000,China)
Abstract:DTH drill rig is currently open pit mine blasting hole drilling equipment,with high work efficiency,low cost easy to maintain the characteristics of large market demand.At present,the tramming and track leveling hydraulic system of the mainstream DTH drilling rig are respectively set in two relatively independent hydraulic modules of tramming and cylinder action.In the process of climbing the rig,workers need to stop the rig first,switch the oil path to the cylinder control loop,and manually adjust the Angle of track leveling to adjust the center of gravity of the drill rig.In this paper,an adaptive parallel tramming hydraulic system is proposed based on the existing drilling rig,which can automatically control the leveling Angle of the track in the process of climbing.At the same time,the left and right tracks have the adaptive function of undulating road when walking on the flat road.
Keywords:DTH drill rig;AMEsim;adaptive adjustment parallel tramming;hydraulic
0 引言
隨著露天礦山潛孔鉆車的大規(guī)模應(yīng)用,操作人員對潛孔鉆車的功能提出了更高的要求,尤其是在鉆車行走的舒適性、操作的便捷性等方面。本研究在現(xiàn)有露天潛孔鉆車的基礎(chǔ)上,提出基于雙齒輪泵驅(qū)動潛孔鉆車履帶自適應(yīng)調(diào)平行走的液壓系統(tǒng)設(shè)計(jì)方案,該方案的提出為潛孔鉆車行走調(diào)平液壓系統(tǒng)的設(shè)計(jì)提供了設(shè)計(jì)思路和參考,具有積極的工程實(shí)踐指導(dǎo)意義[1]。
1 市場現(xiàn)狀
雙齒輪泵驅(qū)動的潛孔鉆車因液壓系統(tǒng)精簡、產(chǎn)品結(jié)構(gòu)簡單、性價比高,在中低端露天潛孔鉆車市場中占據(jù)絕大多數(shù)的份額。目前,該類型的鉆車液壓系統(tǒng)由鉆車的行走、鉆臂的定位、鑿巖作業(yè)的推進(jìn)回轉(zhuǎn)三大功能系統(tǒng)組成(見圖1)[2]。其中,通過液壓系統(tǒng)中的液壓馬達(dá)來驅(qū)動潛孔鉆車的“四輪一帶”,從而實(shí)現(xiàn)鉆車履帶的行走功能。目前,許多簡易型小型鉆車甚至不具備履帶調(diào)平功能。具備履帶調(diào)平功能的鉆車在行走及爬坡過程中,如遇到陡坡或鉆車需轉(zhuǎn)場登車時,要根據(jù)實(shí)際情況來及時調(diào)整鉆車的調(diào)平油缸,從而實(shí)現(xiàn)對鉆車重心的調(diào)整,避免因鉆車重心過高而導(dǎo)致傾覆事故的發(fā)生。在此過程中,操作人員需要時刻觀察車體重心的變化,并根據(jù)實(shí)際情況在鉆臂定位及行走功能之間來回進(jìn)行切換,進(jìn)而實(shí)現(xiàn)鉆車履帶的調(diào)平角度與鉆車重心的匹配。
2 現(xiàn)有鉆車液壓系統(tǒng)分析
在現(xiàn)有雙泵驅(qū)動潛孔鉆車市場中仍然有相當(dāng)比例的設(shè)備并不具有履帶調(diào)平功能,其在爬陡坡過程中重心無法隨坡度的變化而進(jìn)行相應(yīng)的調(diào)節(jié),導(dǎo)致操作困難,特別是在轉(zhuǎn)場爬平板車的過程中存在著極大的安全隱患[3]。下面以該類型鉆車液壓系統(tǒng)為例,對現(xiàn)有雙泵驅(qū)動鉆車液壓系統(tǒng)進(jìn)行分析。該類型鉆車主要由兩個齒輪泵給鉆車提供液壓動力,液壓泵通常由柴油機(jī)驅(qū)動(電動型或柴電雙動力鉆車的車體內(nèi)還設(shè)置有電動機(jī))。兩個液壓泵出口液壓油通常先供給左右兩個行走閥,分別用來控制兩個行走馬達(dá)的動作,而后左泵液壓油通過左行走閥過橋給推進(jìn)系統(tǒng),并經(jīng)過推進(jìn)閥用于鉆車鉆孔作業(yè)時的推進(jìn)動作,而后過橋給鉆臂定位閥實(shí)現(xiàn)鉆臂油缸的定位動作。右側(cè)泵輸出的液壓油通過右行走閥過橋給回轉(zhuǎn)馬達(dá)供鉆車鑿巖工作時候的回轉(zhuǎn)動作。潛孔鉆車液壓系統(tǒng)如圖2所示。而具有履帶調(diào)平功能的液壓鉆車通常是在圖2所示的液壓系統(tǒng)的基礎(chǔ)上,增加鉆車油缸定位多路閥中的閥片數(shù)量,實(shí)現(xiàn)對左右調(diào)平油缸的獨(dú)立控制,從而調(diào)節(jié)履帶角度,滿足鉆車重心變化的需求。B4580923-1B7C-4064-8555-C506F1A371D8
3 系統(tǒng)建模設(shè)計(jì)及參數(shù)設(shè)置
3.1 基本參數(shù)設(shè)置
通過AMEsim軟件對設(shè)計(jì)方案進(jìn)行系統(tǒng)建模及相關(guān)參數(shù)的設(shè)置。系統(tǒng)基本參數(shù)設(shè)置如表1所示。行走馬達(dá)參數(shù)設(shè)置參考龍工(上海)精工液壓有限公司JXD049型相關(guān)技術(shù)資料。
3.2 控制邏輯
系統(tǒng)的控制邏輯是在現(xiàn)有鉆車的基礎(chǔ)上,增設(shè)感知鉆車車架傾角的傳感器,通過邏輯控制器實(shí)時讀取傳感器的傾角數(shù)據(jù)[4]。同時,計(jì)算重心與履帶調(diào)平角度的關(guān)系。當(dāng)鉆車在平路行走時,通過邏輯控制器將連接兩油缸大小腔的通斷閥打開。此時,左右調(diào)平油缸大小腔已經(jīng)連通。當(dāng)鉆車單邊履帶遇到障礙物時,左右履帶內(nèi)部的液壓油會根據(jù)鉆車重心自動尋找鉆車的平衡位置,從而實(shí)現(xiàn)鉆車履帶的自適應(yīng)調(diào)整。鉆車在爬陡坡時,邏輯控制器根據(jù)鉆車傾角傳感器測量到的數(shù)據(jù)來計(jì)算鉆車的重心位置,進(jìn)而通過三維四通電控閥來控制鉆車左右履帶的調(diào)平角度,從而適應(yīng)爬坡時鉆車重心的變化,盡量降低鉆車的重心,避免因鉆車重心過高而導(dǎo)致傾覆事故的發(fā)生。其主要控制邏輯如圖3所示。
3.3 AMEsim軟件建模
新設(shè)計(jì)的系統(tǒng)由三個功能模塊組成,分別是左行走調(diào)平回路、右行走調(diào)平回路、自適應(yīng)調(diào)平回路[5]。其中,左、右行走調(diào)平回路與現(xiàn)有鉆車的行走回路相同,通過行走閥來控制左右行走液壓馬達(dá),從而實(shí)現(xiàn)鉆車的正常前進(jìn)、后退、轉(zhuǎn)彎等功能。自適應(yīng)調(diào)平回路主要由二位三通電控閥、二位二通電控通斷閥、左右調(diào)平油缸以及液壓管路組成。設(shè)計(jì)方案中的AMEsim軟件建模如圖4所示。其中,主溢流閥的壓力設(shè)定主要用于限定泵的最大工作壓力,在鉆車正常行車過程中并不開啟,鉆車爬陡坡的最大工作壓力由左右行走溢流閥來調(diào)定。正常情況下,行走馬達(dá)一般都帶有液壓剎車,所以控制液壓馬達(dá)的行走閥的中位機(jī)選擇Y型,從而確保馬達(dá)在非行走姿態(tài)能夠正常剎車、駐車。而用于控制調(diào)平油缸的控制閥則采用具有O型中位機(jī)能的三位四通閥,以模擬調(diào)平油缸在非調(diào)平或鉆孔作業(yè)時履帶能夠鎖死,避免左右油缸間的相互串油,使鉆車的姿態(tài)發(fā)生變化,影響正常鉆孔作業(yè)。
3.4 計(jì)算分析
在AMEsim軟件中設(shè)定系統(tǒng)模擬時間總長為10 s,數(shù)據(jù)采樣間隔為0.1 s。
路況模擬1。給左右馬達(dá)行走減速機(jī)輸入一個最小8 000 N·m、最大15 000 N·m的隨機(jī)變量,用于模擬較大爬坡角度時的鉆車路況。從模擬結(jié)果來看,當(dāng)一個較大的爬坡扭矩出現(xiàn)后,鉆車的左右行走馬達(dá)迅速達(dá)到溢流閥的最大設(shè)定壓力,與實(shí)際情況相符。
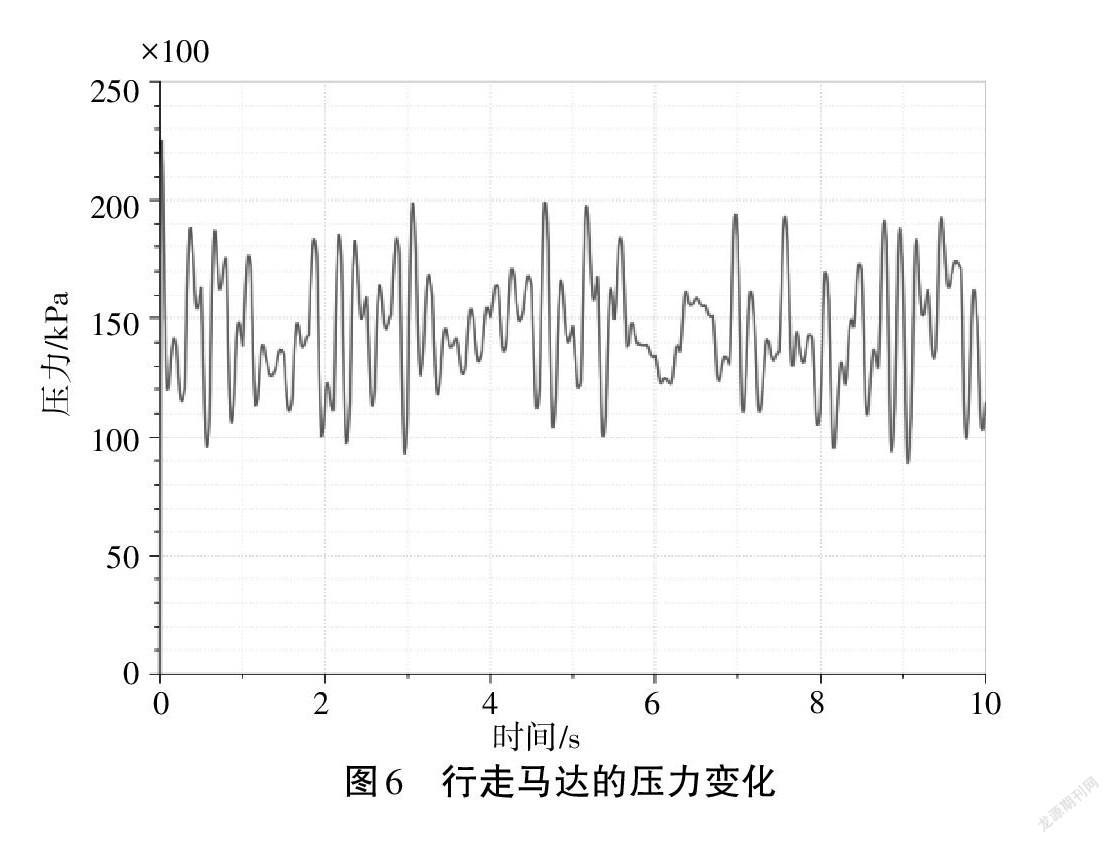
路況模擬2。給左右馬達(dá)行走減速機(jī)輸入一個最小5 000 N·m、最大8 000 N·m的隨機(jī)變量,用于模擬鉆車較小爬坡角度時的路況,隨機(jī)負(fù)載如圖5所示。從模擬結(jié)果來看,當(dāng)鉆車在比較平緩的爬坡角度上行走時,左右行走馬達(dá)的壓力隨負(fù)載值的變化而變化,且趨勢與外界負(fù)載大小變化一致,與實(shí)際情況相符合。模擬結(jié)果如圖6所示。
通過AMEsim軟件對以上兩種路況進(jìn)行模擬,可以看出裝備自適應(yīng)調(diào)平裝置系統(tǒng)的潛孔鉆車在爬坡路況下,行走壓力變化與實(shí)際情況相符,且趨勢一致,能夠滿足鉆車正常行走及爬坡的系統(tǒng)設(shè)計(jì)要求。
4 結(jié)語
本研究所述的鉆車履帶自適應(yīng)調(diào)平行走液壓系統(tǒng)能夠滿足雙齒輪泵驅(qū)動的潛孔鉆車的行走及履帶調(diào)平功能的基本設(shè)計(jì)需求,可以實(shí)現(xiàn)鉆車在爬坡過程中,根據(jù)路面坡度情況自動調(diào)整履帶的角度,以降低鉆車重心的變化需要。同時,在平路行走時,可實(shí)現(xiàn)左右履帶對路面起伏狀態(tài)的自適應(yīng)。該設(shè)計(jì)方案可為潛孔鉆車液壓系統(tǒng)的設(shè)計(jì)改進(jìn)提供新的思路、依據(jù)和參考。
參考文獻(xiàn):
[1] 郭勇,周振華.潛孔鉆機(jī)的應(yīng)用現(xiàn)狀與發(fā)展趨勢[J].礦業(yè)快報(bào),2008(4):13-15.
[2] 朱世通.露天鑿巖穿孔設(shè)備發(fā)展概況及趨勢[J].科技風(fēng),2014(2):28-30.
[3] 阿特拉斯·科普柯.產(chǎn)品技術(shù)資料[EB/OL].(2022-05-10)[2022-05-15].http://www.atlascopco.com.cn/zh-cn.
[4] 郭艷.潛孔鉆機(jī)推進(jìn)回轉(zhuǎn)自適應(yīng)系統(tǒng)模糊控制研究[D].湖南:中南大學(xué),2011:32-43.
[5] 高斌.潛孔鉆機(jī)回轉(zhuǎn)液壓系統(tǒng)動態(tài)特性研究[D].湖南:中南大學(xué),2008:22-41.B4580923-1B7C-4064-8555-C506F1A371D8
