2021年吳忠—靈武ML3.6震群重新定位及震源機制研究*
2022-07-01 10:03:34許英才曾憲偉羅國富
地震科學進展 2022年6期
許英才 曾憲偉 羅國富
(寧夏回族自治區地震局,寧夏銀川 750001)
引言
北京時間2021年7月18日—8月7日,寧夏吳忠—靈武地區出現顯著震群活動(圖1),根據寧夏測震臺網記錄,這期間吳忠—靈武地區發生可定位地震事件共26次,其中ML0.0—0.9級4次,ML1.0—1.9級 15次,ML2.0—2.9級3次,ML3.0—3.9級4次,最大地震為7月20日02時40分ML3.6地震,次大地震分別為7月20日03時15分ML3.2和09時08分ML3.2地震,最大日頻次為13次(圖1)。尤其是7月20日02時40分ML3.6地震發生后,震中區域絕大部分人反映震感較明顯,更有甚者從睡夢中驚醒跑出屋外。這也是1970年以來銀川盆地南部所發生的罕見顯著性震群,而且還是發生在2021年青海瑪多7.4級地震之后的背景下。從地質構造上來看,該震群所在的吳忠—靈武地區位于青藏高原東北緣弧形構造區到華北克拉通西部的轉換帶區域[1-2],具有多重共軛構造的特征,以牛首山斷裂為界,斷裂南側主要為青藏高原東北緣弧形構造區,發育了多個褶皺山區以及壓陷型斷陷盆地;而牛首山斷裂以北主要以拉張型斷陷盆地為主,由于處于阿拉善和鄂爾多斯地塊之間的區域,在青藏高原東北緣北東向的推擠作用下,該區域受到了鄂爾多斯和阿拉善地塊的阻擋和相對運動作用,使得銀川盆地自始新世以來一直處在NW-SE方向的拉張環境下,發育了多條活動斷裂以及一些次級隱伏斷裂等(圖1),其中NNE向和NS向的斷裂主要以正斷兼右旋走滑的方式活動。1970年以來,震群附近的10 km范圍內發生過5級以上的主震共3次,分別為1984年11月23日靈武MS5.3地震、1987年8月10日靈武MS5.5地震以及1988年1月4日靈武MS5.5地震,其震源機制類型主要為走滑型。地震活動性方面的震例回溯性總結表明[3],這些5級主震發生之前,廣義前震和地震增強特征比較顯著,尤其是震前兩個月時間內,主震所在震中的20—30 km范圍內均集中發生ML3.0以上地震至少4次,其中包含至少1次ML4.0以上的標志性地震。而2021年7月18日以來發生的吳忠—靈武ML3.6震群短短1天多一點的時間內就集中發生4次ML3.0以上的地震,因此,該震群所表現的小震活躍態勢要重點關注。本文通過多階段定位以及震源機制計算方法對該震群進行分析和研究,獲得該震群序列的震源參數,可以為以后該區域的震情跟蹤及震情研判補充和提供相關數字地震學資料。
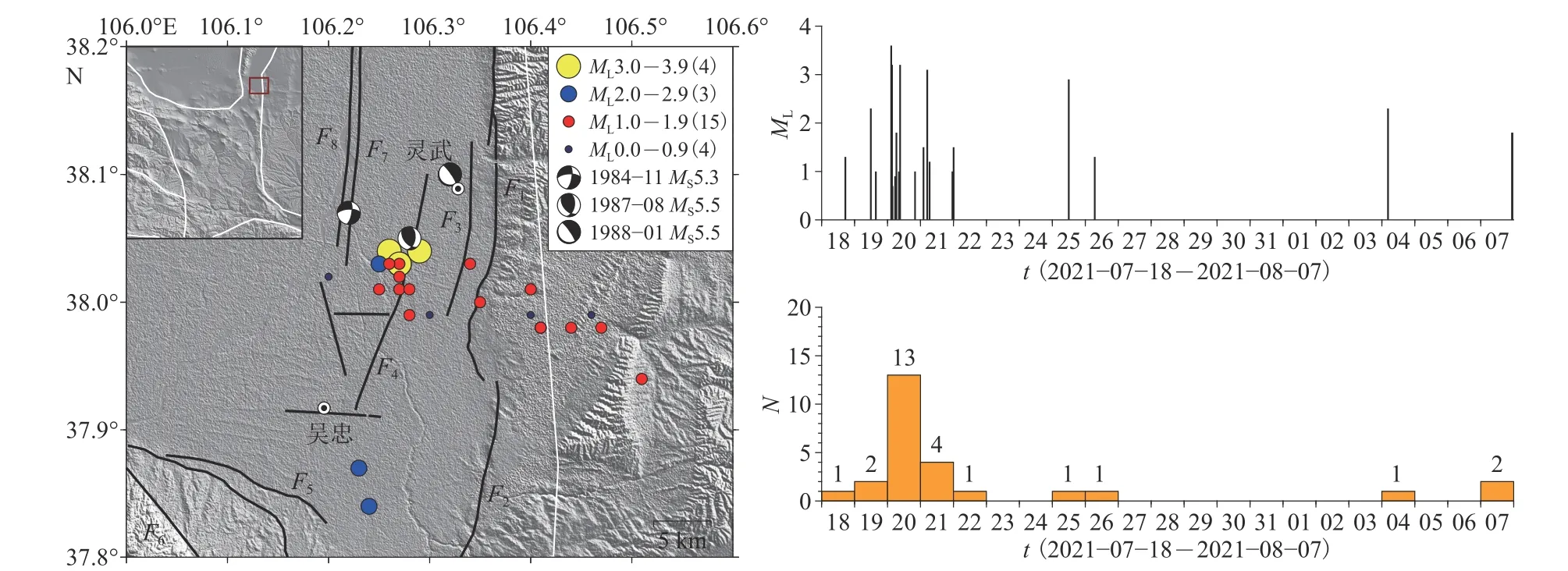
圖1 2021年吳忠—靈武ML3.6震群分布、M-t和日頻次圖Fig. 1 The distribution of the 2021 Wuzhong-Lingwu ML3.6 seismic swarm,M-t and daily frequency diagram
1 方法與數據處理
1.1 多階段定位
多階段定位方法[4]可以校正震相的到時數據、獲取合適的速度模型以及得到更為相對精細的精定位結果,作為一種提高觀測報告數據精度的重要手段之一,多階段定位方法目前較為普遍的在國內得到了一定的應用[5-8]。本文運用該方法的數據處理流程如下: ① 收集寧夏區域地震臺網記錄的2010年1月—2021年8月吳忠—靈武震群區域(106.0°—106.6°E,37.8°—38.2°N)ML≥1.0地震的正式地震觀測報告,然后選取滿足震中距200 km范圍內且具有至少6個以上臺站記錄地震事件信息共202個(其中2021年吳忠—靈武震群符合該條件的地震事件數為14個),初至P波震相2 049條和S波震相2 090條,并通過和達曲線剔除2倍均方差之外的離散震相數據(圖2),使得震相到時的精度有所提高; ② 利用楊明芝等[9]的寧夏及鄰區平均速度模型作為初始模型,平均波速比約為1.73,通過Hypo2000方法[10]進行初定位; ③ 挑選具有6個以上的臺站記錄、最大臺站方位角間隙小于150°的地震事件觀測報告,利用Velest方法[11-12]進行最小一維速度模型反演,獲取更適合震群區域的最小一維速度模型和臺站時間校正值; ④ 使用新的速度模型和扣除臺站校正值后的震相報告數據,再次使用Hypo2000進行二次定位; ⑤ 根據上述步驟得到校正走時和最小一維速度模型(圖3),通過去掉低速層且簡化速度類似的分層,獲取簡化的一維速度模型,并將其作為雙差定位的輸入模型(表1),然后利用HypoDD方法[13]對校正后的走時數據進行雙差定位;雙差定位過程中,地震的控制參數為:最小連接數(MINLINK)為4,最小觀測數(MINOBS)為2,最大震源間距(MAXSEP)<10 km,最大震中距(MAXDIST)<200 km;考慮到震群所在區域較為復雜的地質構造可能會影響S波到時精度,為此設置P波權重為1.0,S波權重為0.5,設置阻尼值DAMP為40,并運行3次的LSQR迭代來雙差定位。
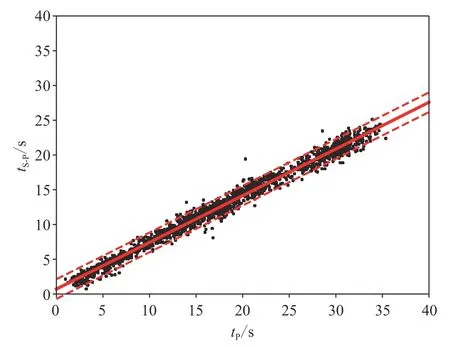
圖2 研究區內的震相和達曲線和篩選范圍 (紅色虛線為擬合直線的2倍均方差) Fig. 2 Wadadi diagram and the selected region of phase data in the research area (red dashed lines are the limits for 2.0 RMS of the fit line)

表1 根據圖3得到的吳忠—靈武地區簡化的一維速度模型參數Table 1 The parameters of simplified 1-D velocity model for the Wuzhong-Linwu region from Fig.3
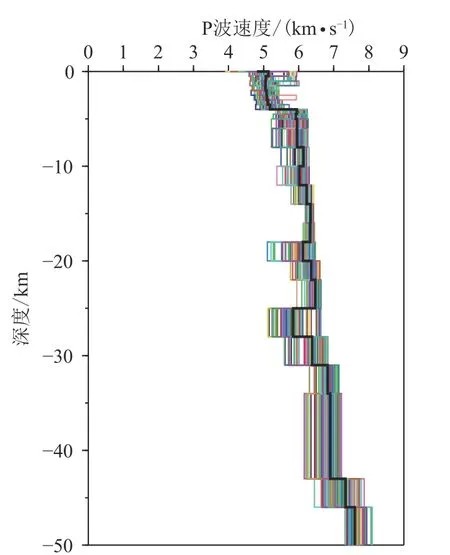
圖3 吳忠—靈武地區的一維速度模型 (彩色線為反演過程中擾動值,黑粗線為平均結果) Fig. 3 1-D velocity model for the Wuzhong-Linwu region(colorized lines are the disturbed values during the inversion process,and thick black line is the average result)
1.2 震源機制計算
本文使用的P波初動聯合振幅比的Snoke方法[14]需要將3分量原始地震波形旋轉至R-T-Z分量,然后在Z分量上量取Pg初動和振幅,在R-T分量上量取SV及SH波初動和振幅,最后多次調整初動符號矛盾數以及振幅比矛盾數以求得最佳機制解,通過對吳忠—靈武震群ML≥3.0的地震事件進行Snoke方法測定,旋轉波形后選取信噪比較好且初動清晰的臺站量取其初動和振幅,這些ML3.0以上地震主要使用了距離震中0—200 km范圍的臺站(圖4),且其方位角分布較為均勻。而近震波形擬合反演的gCAP方法[15]是通過對體波和面波給予不同的權重,計算實際波形和理論波形的擬合誤差函數,利用網格搜索取得其誤差最小的最佳解,通過對吳忠—靈武震群最大的ML3.6地震進行gCAP方法反演,反演時選取震中距主要介于70—200 km范圍的臺站(圖4),體波和面波的濾波范圍分別為0.03—0.2 Hz和0.06—0.1 Hz。

圖4 多階段定位、Snoke方法及gCAP方法所使用的臺站分布(灰線為塊體線,黑線為斷裂) Fig. 4 The distribution of seismic stations used by multi-step locating method,Snoke and gCAP method (gray lines are block boundaries,and black lines are faults)
2 計算結果與分析
2.1 多階段定位結果
通過對2010年1月—2021年8月震群所在區域(37.8°—38.2°N,106.0°—106.6°E)滿足6個臺站以上記錄的共202次ML1.0以上地震(其中,2021年吳忠—靈武震群地震數量為14次)進行多階段定位,其雙差定位結果顯示其CND值范圍在32—78之間(CND是雙差方程的條件數,其意義是說明雙差方程的情況,一般取值范圍在1—100之間較為合理),共獲得165次地震的震源精定位參數,即得到了約82%地震的重定位結果,只丟失了18%地震,其中,2021年吳忠—靈武震群的14次地震均得到全部重定位,其EW向、NS向以及垂直向的相對平均定位誤差分別為0.75 km、0.46 km和0.96 km,平均走時殘差約為0.19 s,和原始正式觀測報告的平均走時殘差0.31 s比起來,多階段定位方法重定位結果精度得到了一定程度的提高。
本次震群序列中4次ML3.0以上地震的重定位參數分別為:2021年7月20日02時40分ML3.6地震發震時刻2021-07-20 02:40:25.7,震中位置(38.020°N,106.250°E),震源深度12.5 km;7月20日03時15分ML3.2地震發震時刻2021-07-20 03:15:26.4,震中位置(38.026°N,106.253°E),震源深度11.9 km;7月20日09時08分ML3.2地震發震時刻2021-07-20 09:08:51.8,震中位置(38.023°N,106.273°E),震源深度12.8 km;7月21日04時55分ML3.1地震發震時刻2021-07-21 04:55:16.4,震中位置(38.028°N,106.242°E),震源深度11.6 km。
和原始地震目錄震中分布(圖1)比起來,重新定位后的吳忠—靈武ML3.6震群序列在空間上更為集中(圖5),其中震源深度0—5 km有2個,6—10 km有3個,10—15 km有7個,15 km以上只有2個。該震群序列主要位于NNE向的崇興斷裂(F4)附近。從震群序列在垂向角度來看,AA'剖面沿著序列的優勢長軸方向,投影寬度為剖面線兩側各25 km,BB'剖面為接近優勢長軸的中心且垂直長軸的剖面,投影寬度為剖面線兩側各10 km。AA'剖面顯示震群序列展布由深到淺的展布方向整體傾角較陡,近似于陡立;BB'剖面顯示震群除了有2次地震位于關馬湖斷裂(F5)之外,剩下崇興斷裂(F4)附近區域的地震序列在縱向上主要呈現近似垂直的展布。從震群發生時間上來看,大體呈現由深部往淺部、由里往外破裂的趨勢。
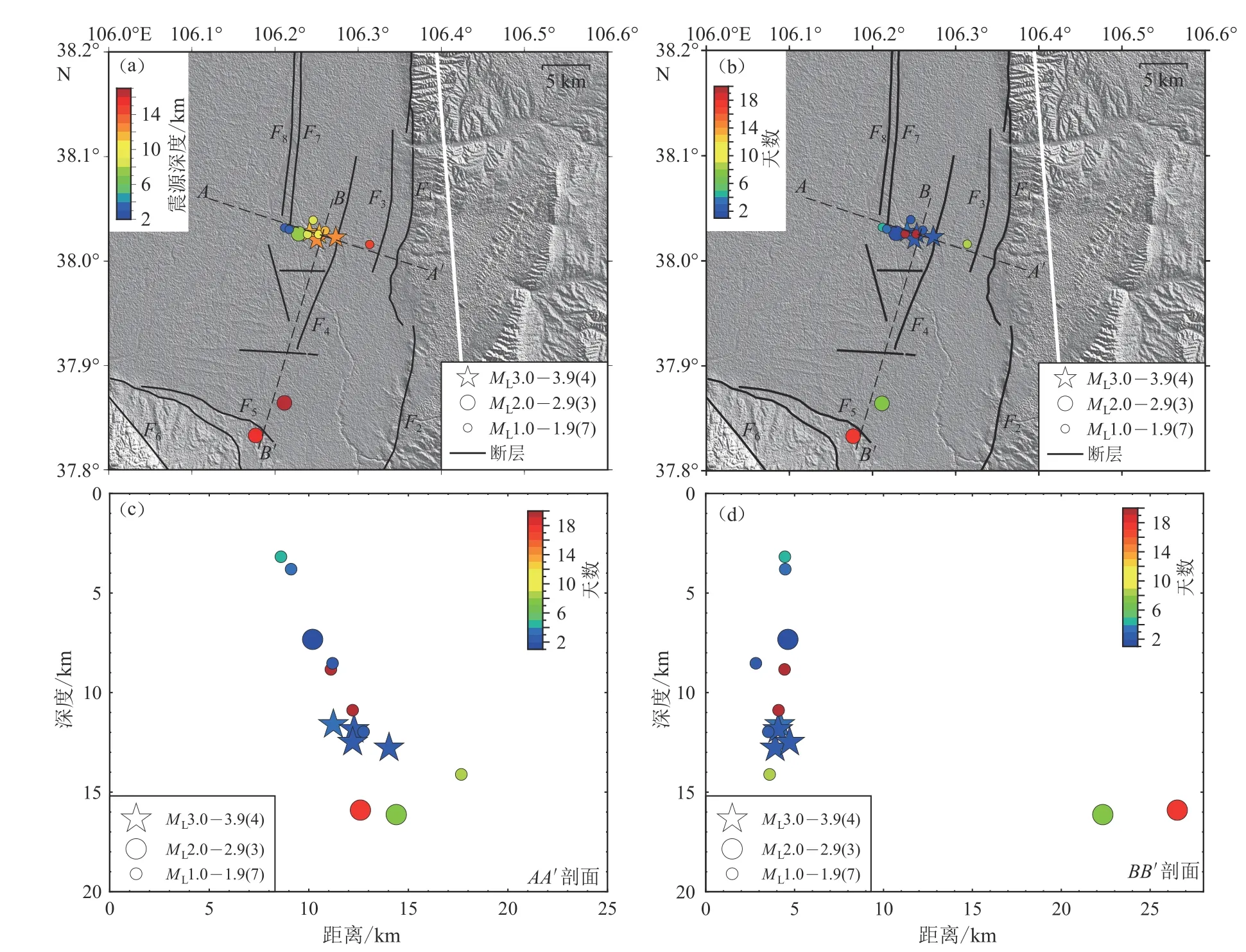
圖5 重定位后的2021年吳忠—靈武ML3.6震群序列的震中分布和AA'、BB' 垂直剖面分布圖Fig. 5 Distributions of the earthquake epicenter after relocation of the 2021 Wuzhong-Lingwu ML3.6 swarm sequence,and crosssections of AA' and BB'
2.2 Snoke方法計算ML3.0以上地震震源機制解結果
對吳忠—靈武震群4次ML3.0以上地震,基于多階段定位得到的吳忠—靈武地區一維速度模型(表1),通過Snoke方法求解震源機制解。除了7月20日09時08分ML3.2地震由于波形質量和信噪比等問題導致清晰初動記錄臺站太少而不滿足Snoke計算條件之外,得到了剩余3次可計算地震事件(7月20日02時40分ML3.6、7月20日03時15分ML3.2和7月21日04時55分ML3.1)的震源機制解(圖6)。由于Snoke方法的結果存在一定的多解結果,但是這些多解結果比較接近,為此利用震源機制中心解的方法[16]測定了這些多解的平均解作為Snoke方法的最終結果。整體來看,3次ML3.0以上地震震源機制的兩個節面走向均大體分別為NNE和NWW向,其中NNE向節面和距離震群最近的已知斷裂即崇興斷裂(F4)走向最為接近。除了7月21日04時55分ML3.1地震震源機制為不確定型之外,剩下的均為走滑型,該3次地震的主壓應力軸大體呈現為NE向。
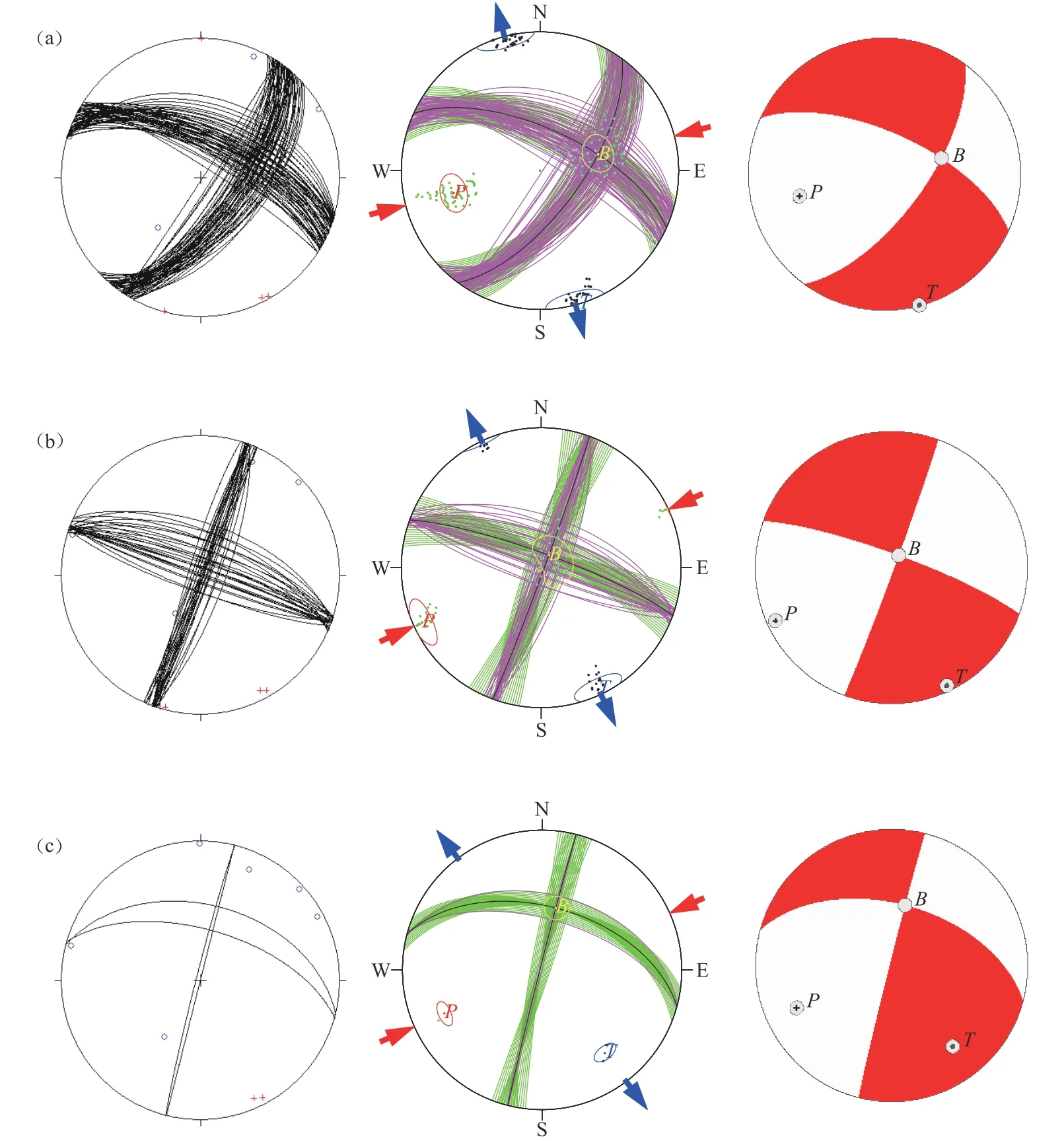
圖6 2021年7月20日02時40分ML3.6地震(a) 、7月20日03時15分ML3.2地震(b) 和7月21日04時55分ML3.1地震(c) 的Snoke結果和其多解的震源機制中心解Fig. 6 The Snoke results and the center focal mechanism for multiple solutions of the ML3.6 earthquake at 02:40 am on July 20,2021 (a),the ML3.2 earthquake at 03:15 am on July 20,2021 (b) and the ML3.1 earthquake at 04:55 am on July 21,2021 (c)
2.3 gCAP方法計算ML3.6地震震源機制解結果
基于多階段定位得到的吳忠—靈武地區一維速度模型(表1),利用頻率—波數法計算格林函數,然后通過gCAP方法反演該震群中最大的地震即2021年7月20日02時40分靈武ML3.6地震的震源機制解和震源深度(圖7)。反演得到的最佳擬合的震源矩心深度為12 km,略低于重定位的初始破裂深度12.5 km,而其最優深度處的理論與觀測波形擬合圖顯示其最佳震源機制解節面Ⅰ為走向284°,傾角79°,滑動角—17°,矩震級MW3.86。參與反演的臺站共8個,參與計算的震相有36個,綜合來看,整體理論與觀測波形的擬合系數大于70%的有24個,占參與計算震相總數的66%,由于該地震震級不大,認為反演結果在可接受的范圍內。該方法得到的震源機制類型為走滑型,且主壓應力軸為NE向,其中NNE向的節面也與已有斷裂即崇興斷裂(F4)走向基本一致。
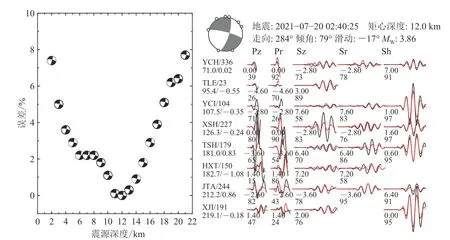
圖7 gCAP方法得到的2021年7月20日靈武ML3.6地震的波形擬合誤差—深度圖及理論波形(紅) 和觀測波形(黑) 波形擬合圖,擬合圖波形左上角為臺站代碼和方位角(單位:°) ,其下側為震中距(單位:km) 和相對偏移時間(單位:s) ;波形下方兩行數字分別為理論波形相對觀測波形的移動時間(單位:s) 和相關系數(單位:%) Fig. 7 The waveform fitting error variation with depth and the fitting diagram between synthetic(red) and observed (black)waveforms of the ML3.6 Lingwu earthquake on July 20,2021 from gCAP method. Letters in the upper left corner are the station names and azimuth (in degree),and under the names are epicentral distance (in km) and relative time shift (in second). Numbers under the waveforms are the time shifts (in second) of the synthetic waveforms relative to the observation waveforms and their correlation coefficients (in percentage)
2.4 2021年7月20日靈武ML3.6地震震源機制中心解測定
為對比和了解該地震Snoke和gCAP方法結果之間的離散程度,測定了這兩種方法結果的震源機制中心解[16],獲得分別以不同方法所得震源機制解結果為初始解給出的標準差(表2),可見兩種方法結果的標準差基本一致(僅在小數點后5位有所差異),客觀反映這兩種方法得到的震源機制解結果是相對穩定的。比較Snoke和gCAP方法作為初始解得到的標準差,可以看出以gCAP方法的結果作為初始解得到的震源機制標準差更小,然后得到了最終震源機制中心解(表3、圖8):節面Ⅰ:走向289.18°、傾角72.21°、滑動角—22.27°;節面Ⅱ:走向26.31°、傾角68.85°、滑動角—160.88°。其中,壓應力軸(P軸)走向與傾伏角不確定范圍分別為236.70°—257.70°和20.82°—35.62°,張應力軸(T軸)走向與傾伏角的不確定范圍分別為327.90°—348.90°和—5.75°—10.08°,中間應力軸(B軸)走向與傾伏角的不確定范圍分別為53.17°—92.26°和54.73°—70.27°。而其震源機制中心解與Snoke和gCAP方法結果的最小空間旋轉角基本一致,其中,gCAP方法結果不僅僅標準差更小,而且空間旋轉角(10.68°)也是相對更小,這說明gCAP方法結果相對更接近震源機制中心解的結果。而此次地震兩種方法的中心震源機制和其不確定性(圖8)顯示,此地震的震源機制中心解測定的P軸、B軸誤差范圍相對較小,而T軸的誤差范圍相對較大。本文也給出了2021年7月20日02時40分靈武ML3.6地震的震源機制中心解,并采用中心解結果作為該地震的主要震源參數。
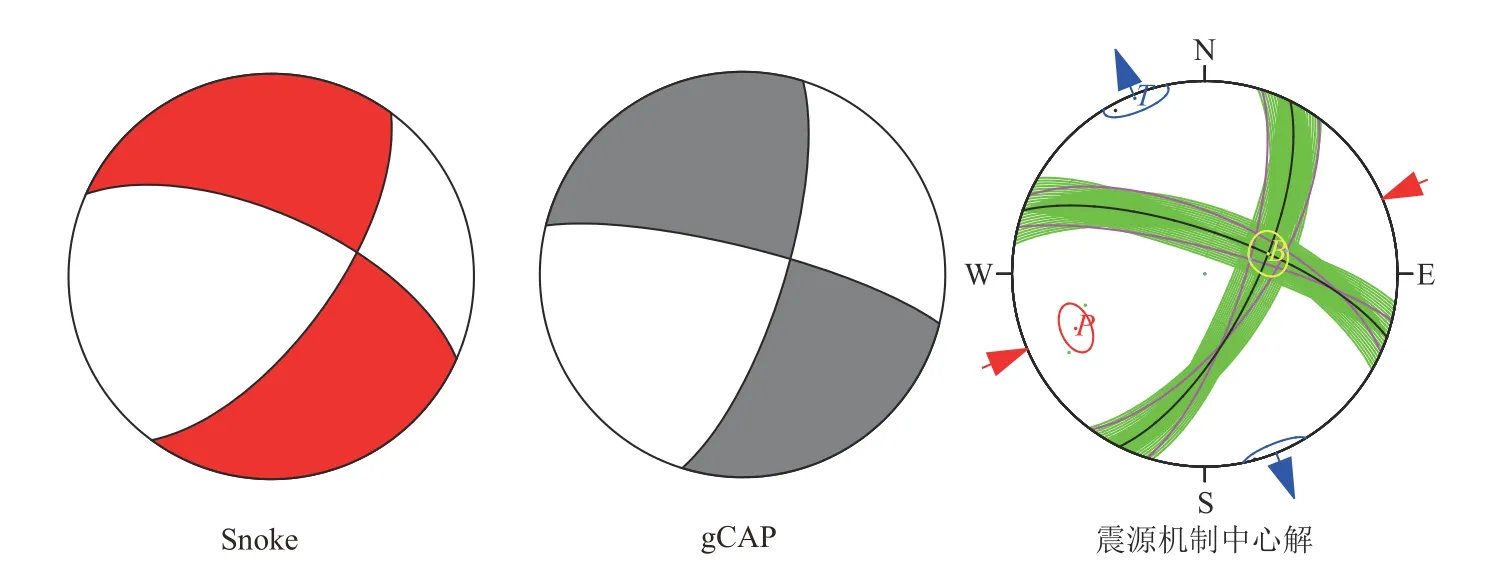
圖8 2021年7月20日靈武ML3.6地震的震源機制(Snoke方法和gCAP方法) 及其中心解Fig. 8 The focal mechanism of the ML3.6 Lingwu earthquake on July 20,2021 by Snoke and gCAP method and their central focal mechanism

表2 Snoke方法和gCAP方法給出的2021年7月20日02時40分靈武ML3.6地震震源機制解和得到的中心機制解及標準差Table 2 Focal mechanism of the Lingwu ML3.6 earthquake at 02:40 am on July 20,2021 by Snoke and gCAP method,the center focal mechanism and its residuals
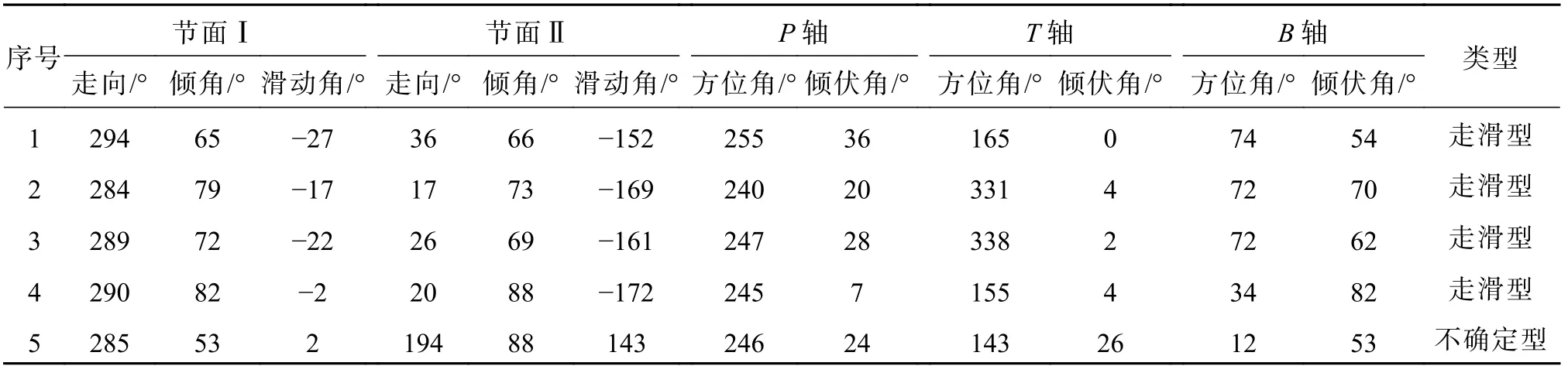
表3 2021年吳忠—靈武震群中ML≥3.0地震多種方法結果的兩個節面、P、T、B軸參數及震源機制類型Table 3 The two nodal planes,P,T,B axes parameters of different methods for ML≥3.0 earthquakes in the 2021 Wuzhong-Lingwu seismic swarm and focal mechanism types
2.5 2021年靈武ML3.6地震所在區域應力體系下的震源機制、相對剪應力及正應力
根據已有吳忠—靈武地區的相關區域應力場參數資料[18](壓應力軸走向52°,傾伏角26°;張應力軸走向190°,傾伏角57°;應力形因子R值為0.05),而震源機制解選取2021年靈武ML3.6地震震源機制中心解的節面Ⅱ(走向26°、傾角69°和滑動角—161°),然后基于震源機制與應力體系模擬的研究方法[19],對該區域應力場和震源機制解的關系進行模擬,得到了該區域應力體系下的震源機制、相對剪應力及正應力分布(圖9)。
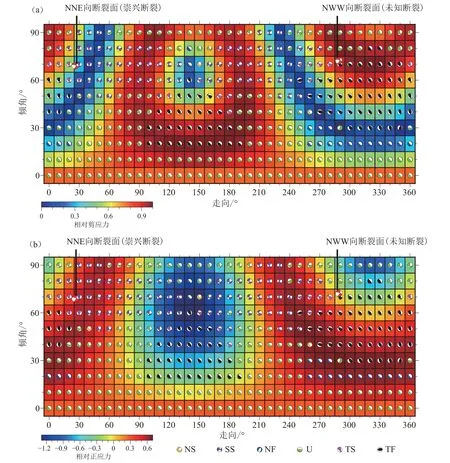
圖9 2021年靈武ML3.6地震所在區域應力體系下的震源機制以及相對剪應力(a)和正應力(b)分布Fig. 9 The focal mechanism,distribution of relative shear stress (a) and normal stress (b) under the stress system for 2021 ML3.6 Lingwu earthquake area
應力張量在NNE向節面(走向26.0°,傾角69.0°)上的相對剪應力和相對正應力分別為0.393和0.518,剪應力的滑動角為143.5°;在NWW向節面(走向289.0°,傾角72.3°)上的相對剪應力和相對正應力分別為0.945和0.007,剪應力的滑動角為54.3°。該結果顯示NNE向節面(崇興斷裂)不是最大相對剪應力的斷層面形狀,也不是最大正應力的斷層面形狀,說明該斷裂產生的剪應力方向和現今該地區已有應力場的最大施壓應力方向有著一定的差距;而NWW向節面(未知斷裂)的相對剪應力較大(相對剪應力范圍0—1),而且接近1。如果僅僅從相對剪應力的角度來看,客觀說明NWW向節面的相對剪應力相對最大,且大于NNE向節面的相對剪應力,相對比來說,該地震沿NWW向斷層滑動的可能性要大于NNE向斷層。另外,從圖9該地震震源機制的毗鄰區域網格模擬震源機制類型來看,NNE向節面所在附近模擬的網格震源機制解類型也主要為走滑型,如果假設NNE向節面為斷層面,由于其剪應力較小,則說明NNE向節面(崇興斷裂)有可能是一條斷裂薄弱帶,或該斷裂附近可能存在一些隨機薄弱裂紋,導致該斷裂上產生的剪應力不是最大。
2.6 對震群發震構造的初步分析
已有地質構造資料結果表明[1-2],震群所在區域的地質構造環境主要呈現為右旋走滑環境,應力環境主要呈現為NE向擠壓且NW向拉張。其中距離震群最近的崇興斷裂(F4)為走向NNE向(約20°左右)且傾向NWW向的隱伏正斷裂[20],該斷裂傾角較陡且近似于直立,其相關反射地震資料顯示淺層反射地震射線控制的崇興斷裂延伸長度可達12 km左右;而新華橋斷裂(F7)則為走向近NS向以及傾向SE向的小規模隱伏正斷裂[21],其地震反射資料表明深、淺地震測線控制的該斷裂延伸長度只有9 km左右;距離較遠的黃河斷裂中段(F1)及其南段(F2)為規模巨大的走滑斷裂[22],其淺層表現為典型的花狀構造,延伸至下地殼且切穿莫霍面,斷裂走向近似NS向且傾向W向。
從本文Snoke方法和gCAP方法的震源機制結果來看(表3、圖6和圖7),只有NNE向的節面和上述的這些已知斷裂走向最為符合,這些ML3.0以上地震NNE向節面Ⅱ的走向變化范圍17°—36°之間,而且7月20日ML3.6地震的震源機制中心結果也表明(圖8、表3),NNE向節面走向為26°,基本接近走向約20°的崇興斷裂;重定位結果顯示震群主要集中在崇興斷裂附近(圖5),兩個深度剖面均顯示震群相對集中的區域從深到淺主要呈現近似陡立的展布。另外,震群發生在右旋走滑環境為主的銀川地塹南部,若NWW向節面為發震斷層,則機制解類型為左旋走滑型,和地質構造環境不符,而且目前也尚無NWW向未知斷裂的相關資料;若NNE向節面為發震斷層,則機制解類型為右旋走滑型地震,符合前文提及的右旋走滑背景構造,而且NNE向節面也最為接近震群附近崇興斷裂的走向,精定位剖面也顯示地震相對集中區域的分布也較好的接近崇興斷裂傾角較陡且近似于直立的展布特征。Snoke、gCAP及震源機制中心解的應力軸參數(表3)均和吳忠—靈武地區構造應力場的相關研究成果基本一致[18,23],說明該震群ML≥3.0地震主要是在NE向的區域構造應力場作用下發生的構造性地震事件。再結合歷史上3次已有5級以上地震的震源機制解結果來看(圖1),該震群的震源機制結果比較接近1984年11月靈武MS5.3地震,而且這3次5級以上地震的震源機制除了1988年1月靈武MS5.5地震,剩下的2次地震均有共同的NNE向節面,而剩下的節面走向變化較大且方向不一,但是由于過去資料臺站少且定位精度較差,只能大體反映機制解的兩個節面展布,加之2021年吳忠—靈武ML3.6震群得到的重定位地震數量并不多,至于該震群是不是和歷史3次地震的發震斷層有關還得積累地震資料進一步深入研究。本文模擬的吳忠—靈武地區現今應力場的震源機制和在該地震震源機制兩個節面產生相對剪應力結果反映,盡管從剪應力角度來說NWW向為發震斷層的可能性要大于NNE向的節面,但是也不能排除NNE向節面為發震斷層的可能性,因為如果剪應力不是最大,也有可能是由于歷史上各種地質作用產生的薄弱帶或裂紋導致的,加上該震群中最大地震的震級并不大(矩震級僅約為MW3.86),當剪應力超過薄弱帶或者裂紋所承受的剪應力時,也可能會沿著該斷裂的投影方向發生破裂。
震群序列微略呈現約僅僅5 km左右長度的NWW-SEE向優勢展布,但是這種優勢展布并不明顯。首先,不排除是由于在NNE向崇興斷裂或NWW向未知斷裂的控制下,毗鄰區域的其他斷裂也可能參與了該震群活動;其次,精定位結果EW向、NS向以及垂直向的相對平均定位誤差分別為0.75 km、0.46 km和0.96 km,相對來說EW向誤差要比NS向誤差要大一些,由于寧夏區域地震臺網臺站在EW向臺站數量相對偏少,且遠低于NS向臺站的數量,所以原始地震目錄呈現的NWW-SEE向展布也有可能是由于EW向臺站數量不足且大多數地震震級偏小導致的定位不精,盡管多階段定位提高了定位結果的精度,但是仍無法彌補因EW向臺站過少而帶來的客觀較大水平向誤差;最后,根據2021年靈武ML3.6地震所在區域應力體系下的震源機制、相對剪應力及正應力結果,加之重定位結果存在略顯NWW向優勢的小震分布特點,由于NWW向剪應力相對最大,為此不能排除NWW向節面為發震斷層的可能性。為此通過結合該震群重定位結果、ML3.0以上的震源機制解結果、已有應力體系在ML3.6地震震源機制節面產生的相對剪應力等結果、地質構造以及已有相關斷層資料,初步分析認為,若NNE向的崇興隱伏斷裂為發震斷層,則表明崇興隱伏斷裂可能是一條斷裂薄弱帶,地震錯動方式為右旋走滑;若NWW向的未知隱伏斷裂為發震斷層,則表明該斷裂有可能是靈武ML3.6地震在區域應力場下的剪應力相對最大釋放節面,地震錯動方式為左旋走滑。另外,該震群序列到底是單一的斷裂運動還是多條斷裂參與的活動,仍需要更多的研究進一步證實。
3 結論
本文通過多階段定位的方法對2021年7月18日—8月7日吳忠—靈武ML3.6震群進行了重新定位,并用P波初動聯合振幅比的Snoke方法測定了震群中3次ML≥3.0可計算地震的震源機制解,以及近震波形擬合反演的gCAP方法計算了震群最大地震ML3.6地震的震源機制解和震源矩心深度,測定了同一地震多個震源機制的中心解,計算了已有應力體系下靈武ML3.6地震震源機制節面產生的相對剪應力和正應力,并結合相關地質構造和斷層資料,得出的結果及初步認識主要如下:
(1)2021年吳忠—靈武震群最大地震ML3.6地震的震源參數為:發震時刻為2021年7月20日02時40分25.7秒,震中位置為(38.02°N,106.25°E),震源初始破裂深度為12.5 km,矩心深度為12 km。該地震NNE向節面Ⅰ的走向、傾角和滑動角分別為289°,72°及—22°,NWW向節面Ⅱ的走向、傾角和滑動角分別為26°,69°及—161°。震群中的3次ML≥3.0地震的震源機制解顯示這些地震主要為走滑型地震,主壓應力軸主要為NE向,和吳忠—靈武地區的構造應力場基本一致,ML3.0以上地震的震源機制節面Ⅱ走向和NNE向的崇興斷裂基本一致。
(2)該震群序列主要相對集中在走向約20°的崇興斷裂西側區域,震源深度剖面顯示震群序列由深到淺主要呈現近似陡立的展布,ML3.0以上地震的震源深度主要介于11—12 km之間,震群序列大體呈現由深部向淺部破裂的特征。
(3)應力張量在ML3.6地震震源機制的NNE向崇興斷裂上產生的相對剪應力和相對正應力分別為0.393和0.518,而在NWW向未知斷裂上產生的相對剪應力和相對正應力分別為0.945和0.007,相對剪應力結果客觀表明該地震在NWW向未知斷裂滑動的可能性要大于NNE向的崇興斷裂。
(4)本文結果結合地質構造資料以及已有斷裂資料,初步分析NNE向或NWW向斷層均有可能參與了2021年7月18日—8月7日吳忠—靈武ML3.6震群活動。若NNE向的崇興隱伏斷裂為靈武ML3.6地震的發震斷層,則表明崇興隱伏斷裂可能是一條斷裂薄弱帶,地震破裂方式為右旋走滑型;若NWW向的未知隱伏斷裂為發震斷層,則表明NWW向斷層可能為該地震在區域應力場下的剪應力相對最大釋放節面,其破裂方式是左旋走滑型。
致謝
本文的圖件主要用GMT軟件繪制。萬永革教授提供了震源機制中心解程序,龍鋒高級工程師對多階段定位進行了指導,審稿老師給出了重要的修改建議,作者在此一并表示感謝。
猜你喜歡
四川勞動保障(2021年9期)2022-01-18 05:11:08
兒童故事畫報(2019年5期)2019-05-26 14:26:14
文苑(2018年21期)2018-11-09 01:23:06
中國衛生(2016年9期)2016-11-12 13:28:08
Coco薇(2016年2期)2016-03-22 02:42:52
中國衛生(2015年9期)2015-11-10 03:11:12
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國衛生(2014年3期)2014-11-12 13:18:12