復合電源型無人機能量管理策略研究
2022-07-02 05:34:54李元旭喬培玉彭發醇
電源技術 2022年6期
李元旭,喬培玉,彭發醇
(四川航天系統工程研究所,四川成都 610100)
近年來,隨著控制技術及電源技術的不斷發展,多旋翼無人機受到了人們的極大關注。其應用場景從最初的軍用逐步擴展到民用領域,如電力巡線、植保噴藥、貨物運輸及高清航拍等。其中,復合電源型無人機以其同時具備較高比功率及比能量的優勢備受矚目,其有效解決了單一電源無人機巡航時間短及大電流運行影響電池壽命的問題。目前,應用較為廣泛的是鋰電池及超級電容器復合電源型無人機。超級電容器功率密度高、充放電速度快[1],可充分發揮其削峰填谷作用,補充鋰電池功率,有效應對無人機爬升過程大功率需求及飛行中瞬時波動,保證復合電源穩定供電。
復合電源能量管理策略是對兩種電源間功率做出合理分配[2],需既保障電源輸出功率滿足無人機不同飛行需求,又能使電源間能量互補以延長動力系統使用壽命。目前,應用于無人機能量管理的控制策略有邏輯門限值控制、功率跟隨控制、基于優化的控制及模糊控制等[3-5]。邏輯門限值控制是指根據無人機的當前狀態,對預先設計好的電源系統有限的工作狀態通過邏輯門限進行控制和管理,其控制策略簡單易實現,但沒有考慮電源間功率分配問題,并且在電源切換時會有瞬時電流沖擊[6]。功率跟隨控制是指根據電源的運行狀態及負載需求功率分配各電源功率,使其輸出之和等于負載功率,其控制策略考慮了功率供需雙方實時狀態,并且覆蓋了雙電源所有可能的輸出組合,但對每種情況均需進行嚴格分類及條件判斷,且過多依賴主電源,不能很好地發揮輔助電源作用[7]。基于優化的控制是指先獲取負載運行全過程的數據,再根據數據求出功率分配最優解,其控制策略考慮全面,但在實際工程中應用難度較高[8]。模糊控制是指按照提前設計好的模糊規則,以類似人的思維方式進行模糊推理,從而實現智能控制。文獻[9]以燃料電池-鋰電池為無人機復合電源,采用基于鋰電池荷電狀態的模糊控制,但沒有考慮燃料電池實時狀態,不能綜合考慮電源功率安排;文獻[7]提出了以兩電源荷電狀態及無人機需求為輸入的模糊控制,但其模糊規則的制定對超級電容器的應用不夠充分,使得其在負載高需求下放電過少,低需求下充電過少。
基于此,本文研究了無人機復合電源系統結構,介紹了針對所提系統的能量管理策略,提出了加深超級電容器利用程度的模糊控制,考慮雙電源各自荷電狀態,根據需求功率進行電源間功率初步分配,同時考慮無人機飛行過程中瞬時小幅波動的平抑,將實時檢測出的波動功率分給超級電容器承擔,完成功率二次分配,通過仿真與功率跟隨控制策略進行比較,驗證了所提方法可有效減小鋰電池工作電流,平穩鋰電池功率輸出。
1 復合電源系統結構
鋰電池屬于能量型儲能裝置,難以滿足無人機負載瞬時啟動、重載、大風等突發情況下的大功率或波動性功率需求。因此,配置較小容量的功率型儲能裝置超級電容器作為輔助電源,對鋰電池進行功率補充[10]。由于鋰電池容量充足,荷電狀態變化幅度小,可在超級電容器荷電狀態低時對其充電,使其穩定在良好狀態,為下次大功率補充提供充裕空間。
基于以上考慮,鋰電池通過單向DC/DC 變換器與直流母線相連,將負載側與電池側穩定連接,電池作主電源;超級電容器通過雙向DC/DC 變換器與直流母線連接,既能穩定直流母線電壓,控制超級電容器充放電過程,同時,可通過DC/DC變換器由鋰電池充電。系統結構圖如圖1 所示。
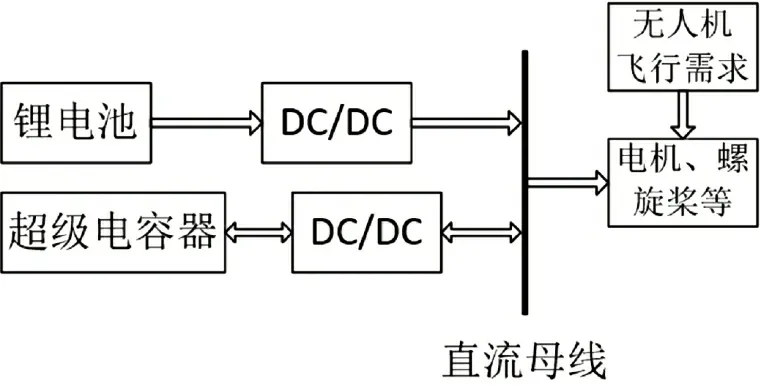
圖1 復合電源系統結構圖
按照無人機飛行需求將其工作狀態劃分為:起飛、巡航、爬升、重載、輕載。其中,需求功率在上升至較高值時會有瞬時沖擊,飛行過程中如遇大風或躲避障礙物等突發情況,需求功率會有一定波動。
2 能量管理策略設計
針對復合電源系統的能量管理策略分為兩步,如圖2 所示,SOCli、SOCsc分別是鋰電池、超級電容器荷電狀態,Pneed是無人機需求功率,Pli_f、Psc_ f分別是鋰電池、超級電容器初次分配功率,分別是鋰電池、超級電容器最終分配功率,ΔP是波動功率。第一步是模糊控制,以充分發揮超級電容器對鋰電池的功率補充作用;第二步是波動修正,以減小波動功率對鋰電池穩定輸出的影響。兩電源最終分配所得的功率滿足無人機需求功率,表示為:

2.1 模糊控制
模糊控制利用人類思維的模糊性編寫模糊規則,進行模糊決策,克服了系統模型不易確定的困難[8]。針對無人機飛行過程爬升降落等各種情況,模糊控制可智能地控制兩電源合理的功率分配完成能量管理。如圖2 所示,模糊控制的控制結構以鋰電池荷電狀態、超級電容器荷電狀態及無人機需求功率為輸入,為突出模糊規則制定中輔助電源的功率補充作用,以超級電容器初次分配功率為輸出。
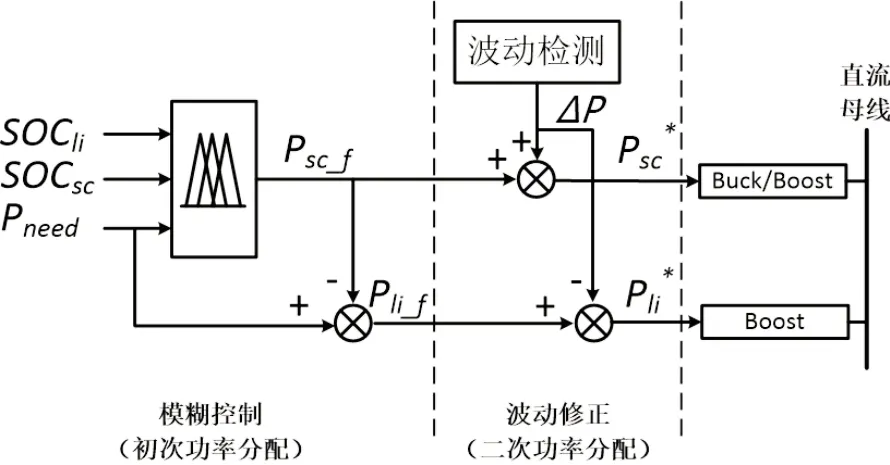
圖2 復合電源能量管理策略
2.1.1 隸屬度函數的定義
由于高斯函數具有優越的過渡性及分布性,模糊隸屬度函數選用高斯函數,如圖3 所示。定義SOCli、SOCsc基本論域分別為[0.2,1]、[0,1],模糊集均劃分為{S、M、B},分別代表小、中、大。定義Pneed基本論域為[0,2 000],模糊集劃分為{VS、S、M、B、VB},分別代表極小、小、中、大、極大。定義Psc_ f基本論域為[-500,1 000],模糊集劃分為{NS、ZO、S、M、B},分別代表負小、零、小、中、大。
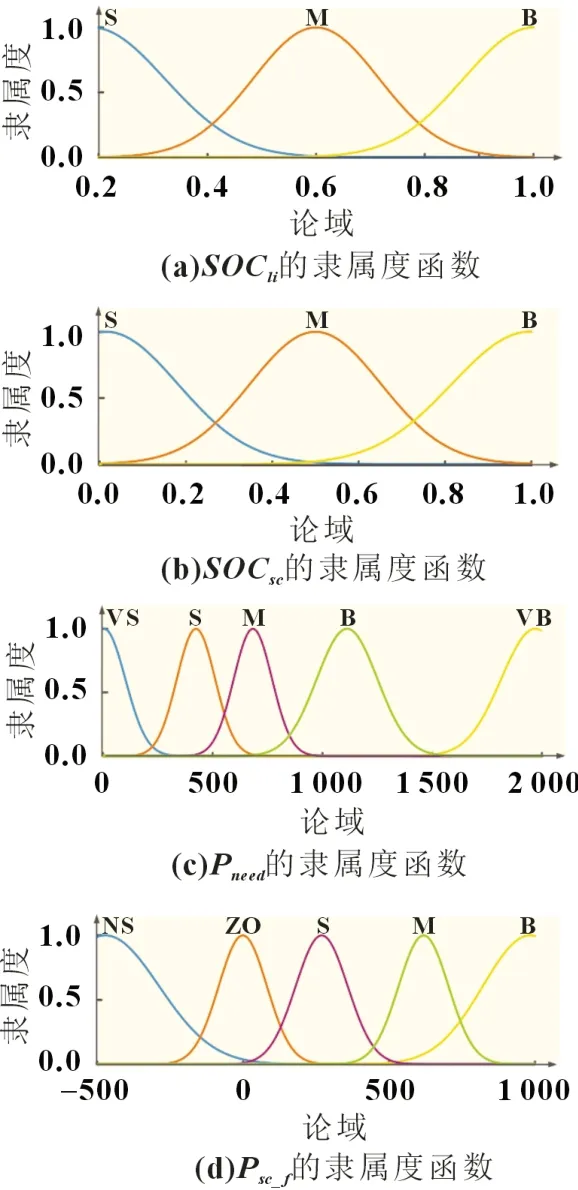
圖3 模糊控制輸入輸出隸屬度函數
2.1.2 模糊規則的制定
考慮到兩電源各自充放電特性以及功率需求,模糊規則制定應服從以下條件:
(1)鋰電池作為主要能量來源,在工作過程中一直處于供電狀態;
(2)無人機為巡航狀態時,鋰電池荷電狀態良好的狀況下,可由鋰電池單獨供電,若鋰電池放電不足,則可由超級電容器補充供電;
(3)在無人機爬升或重載狀態下,為減小鋰電池大電流輸出對電池安全性的影響,鋰電池以較高功率輸出,超級電容器憑借其可大功率輸出的特性全力配合輸出,若超級電容器荷電狀態相比鋰電池占優勢,可主力供電;
(4)在無人機輕載狀態下,鋰電池可保持巡航狀態下功率輸出,多出的功率為超級電容器充電,使超級電容器荷電狀態盡量維持在高水平。
SOCli模糊集為{S、M、B}時,Psc_ f的模糊控制規則如表1~3 所示。
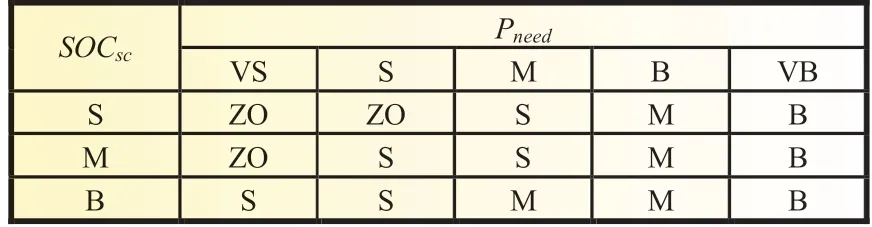
表1 SOCli 的模糊集為S 時Psc_f 的模糊控制規則
2.2 波動修正
由于無人機在飛行狀態由低功率切換至高功率時難免會有一些小幅功率超調,或是在飛行過程中遇到阻礙致使功率發生瞬時波動。因此,設置二次功率分配,即波動修正。波動修正是對模糊控制分配后的功率再次調整,利用超級電容器充放電速度快、比功率大的特性,使其平抑上述超調及波動,有利于鋰電池輸出功率及放電電流的平穩輸出,進而延長鋰電池的使用壽命。
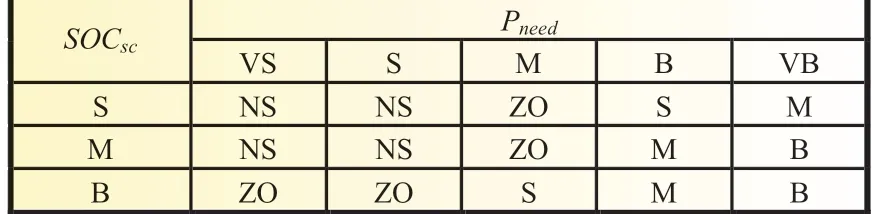
表2 SOCli 的模糊集為M 時Psc_f 的模糊控制規則
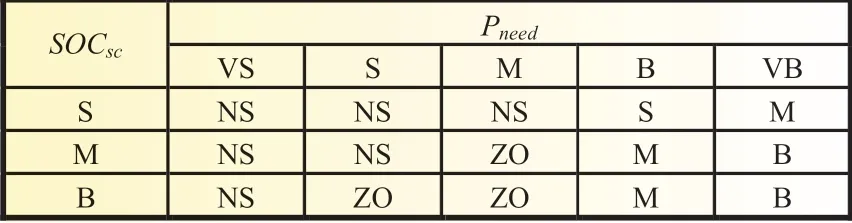
表3 SOCli 的模糊集為B 時Psc_f 的模糊控制規則
無人機運行中產生的功率波動一般具有短時、小幅的特點。根據上述特點,設置波動檢測條件如下:
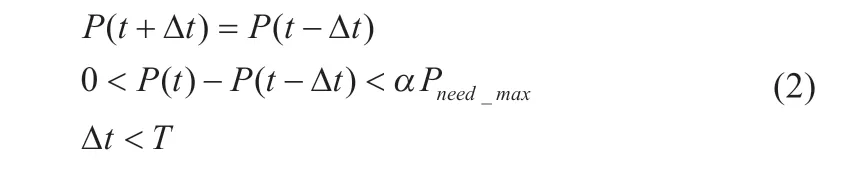
式中:P(t)、P(t-Δt)、P(t+Δt)是實時檢測過程中隨時間變化的功率值;Pneed_max是無人機需求功率最大值;α 是定義的波動幅值系數;T是定義的波動間隔。
如圖2 所示,波動修正將檢測出的波動功率由超級電容器承擔,模糊控制分配所得的鋰電池功率減去這部分波動功率,以此完成二次功率分配,表示如下:
3 仿真分析
本文使用Matlab/Simulink 仿真軟件對所提能量管理策略進行仿真分析。仿真參數如表4 所示。
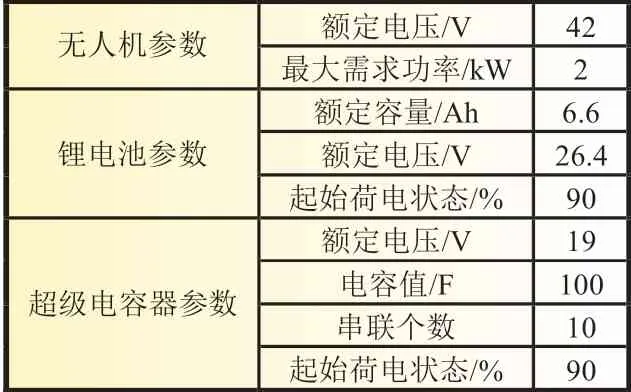
表4 仿真參數
仿真時長設定為30 s,采樣時間為2.5×10-5,α 取0.1,T取0.15 s。根據無人機飛行狀態,理想化功率需求如下:巡航功率為600 W,重載功率為900、1 200 及1 700 W,輕載功率為150、300 及450 W,起飛及爬升狀態下有瞬時沖擊,飛行過程中有小幅波動。無人機需求功率如圖4 所示。
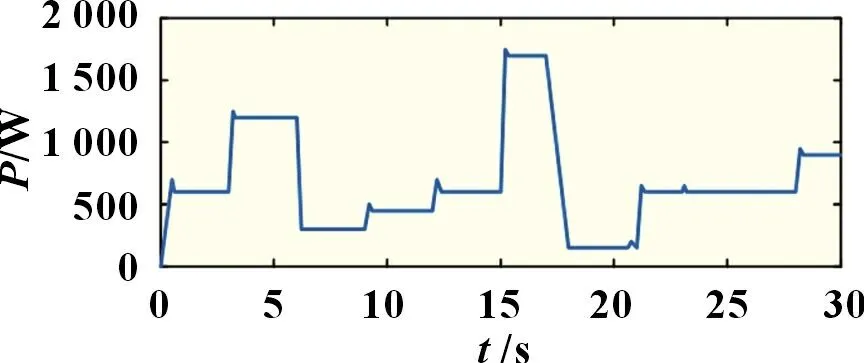
圖4 無人機需求功率
為突出本文所提能量管理策略的優越性,選用功率跟隨控制策略與其對比仿真。功率跟隨控制具體方案為:設置鋰電池額定輸出功率為600 W,最大輸出功率為900 W。若無人機需求功率大于等于最大輸出功率時,鋰電池僅輸出900 W,超級電容器承擔剩余負載需求;若無人機需求功率介于額定輸出功率與最大輸出功率之間,由鋰電池單獨供電給負載;若無人機需求功率小于額定輸出功率,且當超級電容器荷電狀態低于0.85 時,鋰電池同時供電給負載和超級電容器,當超級電容器荷電狀態高于0.85 時,僅由鋰電池供電給負載。仿真結果如圖5~9 所示。
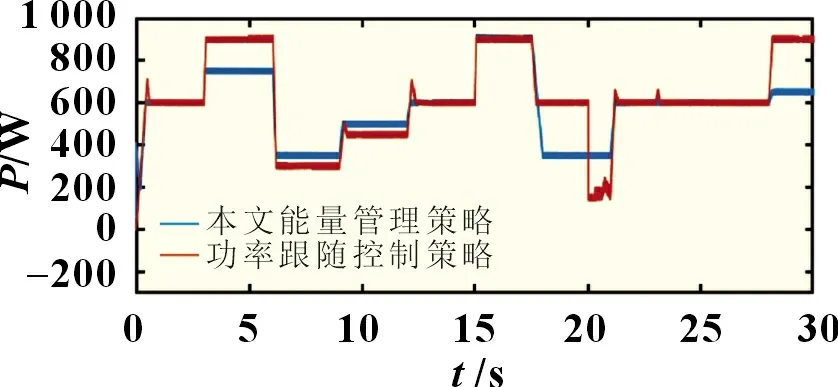
圖5 鋰電池輸出功率對比
由圖5 可知,相比于功率跟隨控制策略,本文策略下鋰電池輸出功率基本穩定在巡航功率600 W 上下,在無人機重載狀態需求功率不是很高時,輸出較小,并且鋰電池輸出功率減小了波動功率的存在,有利于鋰電池輸出電流的穩定。
由圖6 可知,相比于功率跟隨控制策略,本文策略下超級電容器輸出功率在無人機重載狀態下有效補充鋰電池功率為負載供電,在輕載狀態下及時充電保證其放電能力的恢復,并且有效吸納了需求功率中的波動部分,充分利用了超級電容器比功率性儲能特性。
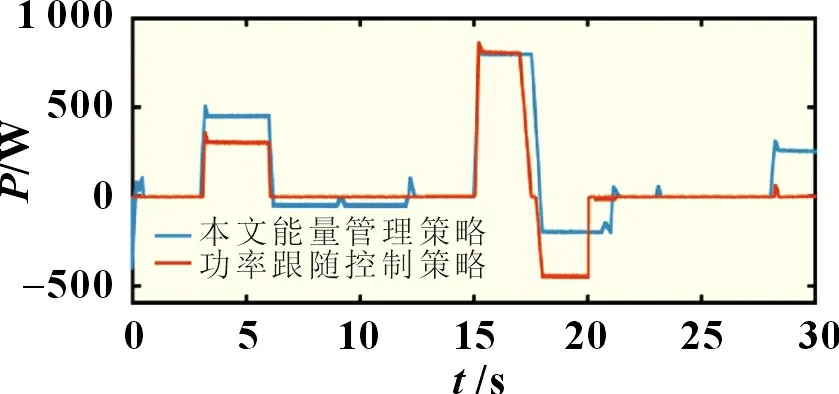
圖6 超級電容器輸出功率對比
由圖7 可知,本文能量管理策略下,由于在無人機重載狀態時限制了鋰電池的功率輸出,使得其荷電狀態相比于功率跟隨控制策略下降較少。
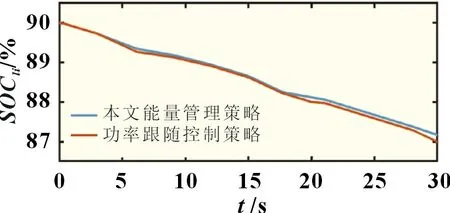
圖7 鋰電池荷電狀態對比
由圖8 可知,本文能量管理策略下,超級電容器由于在無人機重載過程中輸出較多功率,導致荷電狀態下降較多,但在輕載狀態下能夠及時補充能量,盡量維持在良好狀態。
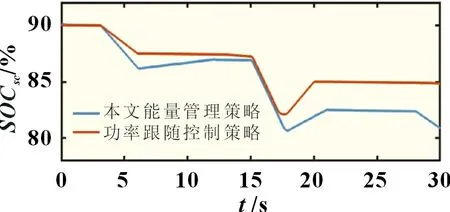
圖8 超級電容器荷電狀態對比
由圖9 可知,鋰電池輸出電流變化趨勢與其輸出功率一致,相比于功率跟隨控制策略,本文策略下鋰電池輸出電流更為平穩,有利于延長電池使用壽命。
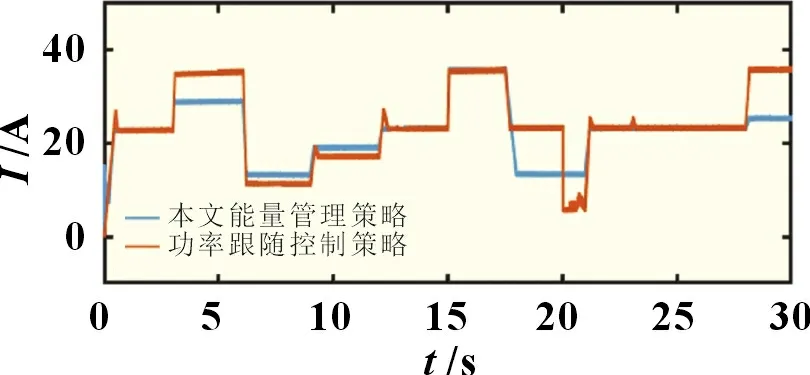
圖9 鋰電池輸出電流對比
4 結論
針對無人機供電問題,本文研究了復合電源的能量管理策略,選用鋰電池-超級電容器作為電源,設計了基于加強超級電容器供電作用的模糊控制及針對波動平抑的功率修正方案,使得超級電容器在無人機重載狀態下作為輔助電源盡力為負載供電,在無人機飛行遇到瞬時功率變化時及時消納波動功率,充分發揮其削峰填谷的作用,有利于復合電源平穩供電。仿真結果表明本文所提策略有效可用。