基于視覺定位的帶電作業鎖桿無線遙控操作技術
2022-07-04 02:54:40吳潮建王嘉源錢嘉棟何旭東趙陳鋼石崢崢
計算技術與自動化 2022年2期
吳潮建 王嘉源 錢嘉棟 何旭東 趙陳鋼 石崢崢


關鍵詞:視覺定位;帶電作業鎖桿;無線遙控;智能相機;像素網格劃分
電力系統的安全平穩運行對保障人們生產生活、推動國民經濟發展具有不可估量的作用。電網規模和分布式電源數量的不斷增加,冰雪、地震等災害的逐年增多,對電力系統安全及可靠性產生重大影響。一旦電力系統出現故障,在導致嚴重經濟損失的同時,還容易發生機械、交通等事故,給生活秩序和社會安全帶來巨大風險,因此加強電網維護尤為關鍵。停電檢修是最安全可靠的維護手段,但由于人們對電能質量的高要求,以及出于對工業生產、系統部件使用壽命等多方面的考慮,帶電作業日益興起,它是指在供電情況下,實現高壓設備的檢修、零件更換等操作,當前大部分均由人工完成。鎖桿是帶電作業中用于鎖緊導線,完成引線搭接、切斷和更換的常用工具,該項作業不僅具有較高的危險系數,勞動強度也非常大,為此需要研究有效的帶電作業鎖桿遠程控制技術,防止人工操作不當引發的事故,提升作業安全性及效率。
該課題引起很多相關專家學者的重視,如閆冬等人,使用層次深度強化學習實現帶電作業鎖桿無線遙控操作,該技術的避障導航成功率高達90%,但受外界環境干擾較大;劉旭等人使用無線通信技術實現帶電作業鎖桿無線遙控操作,該技術的定位效率較高,但與目標位置的偏差相對較大。
機器人能很好地避免主觀情緒,且精度高、安全性穩定。視覺定位可將采集的目標信息轉換為圖像坐標,并進一步獲取實際坐標數據。本文將視覺定位與機器人相結合,提出基于視覺定位的帶電作業鎖桿無線遙控操作技術,通過定位鎖桿位置,利用空問鼠標輸入機械手機器人控制命令,以無線遙控操作鎖桿實現高危帶電作業。
1基于視覺定位的帶電作業鎖桿無線遙控操作技術
1.1視覺定位原理
1.1.1視覺工作流程
將KUKA機械手作為機器手臂,Vision-HAWK智能相機作為攝像頭,通過兩者相互協作實現帶電作業鎖桿定位和操作,下述為具體執行流程:利用智能相機獲取帶電作業鎖桿圖像;通過Visionscape軟件分析及處理獲取的圖像;所得圖像的詳細位置可使用像素網格劃分完成定位計
M表示圖像點的像素坐標,使用齊次坐標描述它和上述p之間的聯系,具體為:
式中,K表示內參數矩陣。世界坐標系和攝像機坐標系問的轉化方式為:
式中,R表示兩者之間的旋轉變換用;T表示平移變換。對于空間點,真實和像素坐標的聯系可通過式(5)和式(6)獲得,具體表示如下:
式中,M表示透視變換矩陣,M表示內部參數;M2表示外部參數;x描述齊次坐標。需使用Visionscape軟件實現上述換算步驟,經對應設定獲取帶電作業鎖桿采集圖像的真實坐標結果,并將其輸送到機械手,以準確定位及操作帶電作業鎖桿。
1.2無線遙控操作技術
選擇空間鼠標當作對機械手控制命令進行輸入的設備,控制帶電作業鎖桿運動,以及路徑規劃,從而實現帶電作業鎖桿無線遙控操作。自由度用描述,它包含于空間鼠標內,該鼠標相當于速度型輸入工具,且和監控計算機串口相連,使用網絡傳輸控制命令,使其到達機械手控制器,可實現對機械手6個自由度的分別操控。
根據上小節獲得的帶電作業鎖桿采集圖像的真實坐標結果,以及機械手的原理,獲得鎖桿末端驅動矩陣,用△T描述,計算過程如公式(8)所示:
式中,增益系數用K,描述,對其進行調整可實現鎖桿運動量變化閾值的修正,維持機械手平穩運動。空間鼠標實現帶電作業鎖桿無線遙控操作的結構圖用圖1描述。
表示增量值,表示控制量用,兩者之間能進行轉化,機械手關節角的控制量可通過正運動學獲得,依據視覺定位返回的帶電作業鎖桿真實位置,操作者可使用空間鼠標完成鎖桿姿態的實時修正。在進行帶電作業時,會受到外界環境等多種因素的影響,操作者難以精準遙控鎖桿,因此使用下述過程完成其路徑規劃。
(1)將立體視覺獲取的帶電作業鎖桿真實位置作為依據,利用空間鼠標將鎖桿移至操作點中心線上方2~4mm位置。將機械手在起始點的位姿,使用新生成的空間鼠標按鍵記錄為P1。以直線或者圓弧插補作為機械手運動的插補形式。
(2)使機械手運動至接下來需要作業的中心線上方,并將機械手位姿記錄為P2,對插補形式進行設置。
(3)循環執行過程(1)、(2),記錄到Pi,停止條件為產生鎖桿運動路徑。
(4)將過程(3)中生成的路徑下載至機械手控制器,提前實施鎖桿運動路徑,依據立體視覺反饋的鎖桿真實位置,對路徑中具有較大偏差的位置進行調整。
(5)機械手控制器對調整后的鎖桿運動路徑進行運作,以實現鎖桿自動完成帶電作業過程。
2仿真測試與分析
使用MATLAB仿真軟件搭建視覺定位的帶電作業鎖桿遙操作現場作業環境,操作者通過對空間鼠標的命令輸入,引導機械手控制鎖桿運動,以驗證本文技術的無線遙控操作性能。
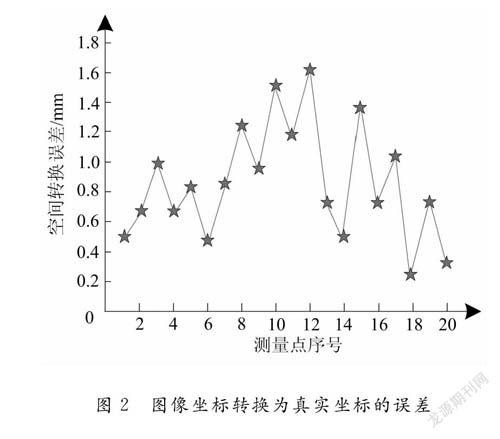
在帶電作業過程中,以某一采集圖像的20個點坐標作為測試對象,驗證其在真實空間中的坐標轉換精度,結果用圖2描述。分析圖2可以看出,將圖像坐標轉換為相應的真實空間坐標時,18號測量點獲得的空間轉換誤差處于最低數值,約為0.28mm,18號測量點的空間轉換誤差最大,在1.6mm左右,20個測試對象的平均誤差大致為0.8 mm。綜合這些數據表明,本文技術的空間坐標轉換誤差相對較低,可獲得較精確的帶電作業鎖桿真實位置信息。
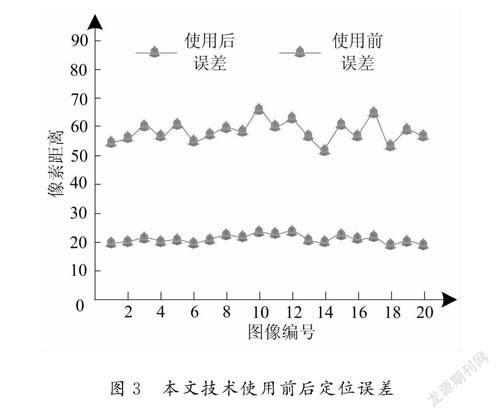
通過計算本文技術使用前后的定位區域中心和實際操作中心之間的像素距離,測試本文技術對20張采集圖像的定位效果,結果用圖3描述。分析圖3可得,本文技術使用前的定位區域中心和實際操作中心之間的像素距離波動較大,最大距離與最小距離相差18左右;本文技術使用后的像素距離變化平穩,無顯著起伏。因此表明,本文技術能有效降低鎖桿操作點和實際位置的偏差,具有較理想的帶電作業鎖桿定位效果,可極大地提升后續無線遙控操作精度。
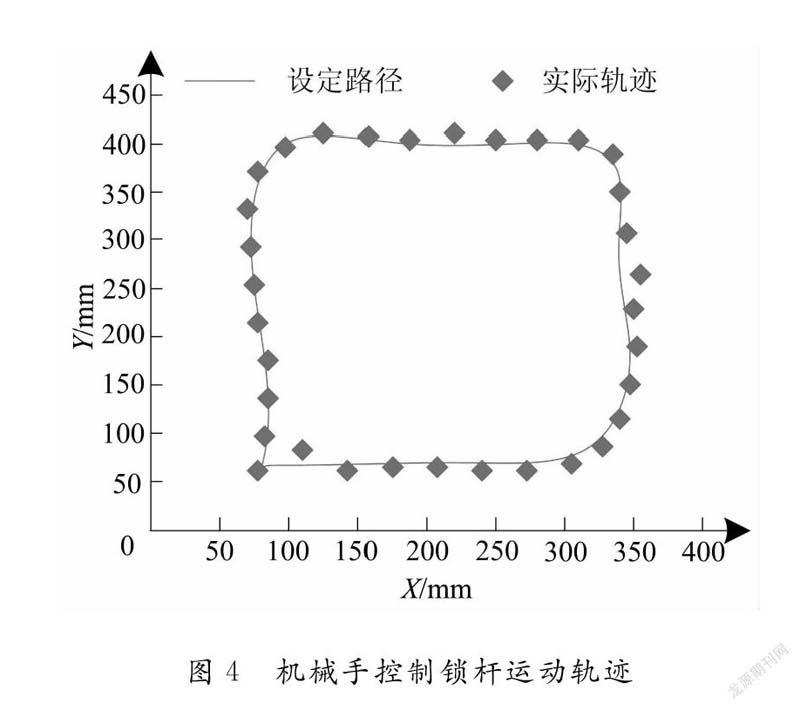
以0.5m/s的速度引導機械手控制鎖桿沿設定路徑運動,起點和終點位置相同,實際運動軌跡和設定路徑的對比結果用圖4描述。從圖4可以看出,通過無線遙控操作,引導機械手控制鎖桿運動的軌跡和設定路徑基本一致,只有兩處出現較小偏差,其余點均分布在設定路線上。因此可得,本文技術的帶電作業鎖桿無線遙控操作性能具有明顯優勢。
使用本文技術進行帶電作業鎖桿無線遙控操作所得橫向偏差與縱向偏差結果用圖5描述。分析圖5可以發現,通過本文技術完成帶電作業鎖桿無線遙控操作時,橫向偏差與縱向偏差均在標準值附近波動,并在達到一定時間后呈現明顯的下降趨勢,兩者的最低值分別為-0.5mm、200mm。因此表明,本文技術具有較優異的帶電作業鎖桿無線遙控操作精度。
3結論
本文提出了基于視覺定位的帶電作業鎖桿無線遙控操作技術,將視覺定位與機器人遙控操作相結合,實現鎖桿遠程控制。該技術能夠精準定位鎖桿真實位置,且對鎖桿的遙控操作偏差較小。通過該技術代替人工帶電作業方式可極大地提高作業質量和安全,對保證電力系統平穩運行具有關鍵作用。