強橫風作用下車輛半主動懸架模糊PID控制研究
2022-07-04 02:25:12袁傳義唐金花
噪聲與振動控制 2022年3期
袁傳義,張 焱,唐金花
(江蘇理工學院 汽車與交通工程學院, 江蘇 常州 213001)
懸架的作用是傳遞作用在車輪和車架之間的力和力矩,同時緩沖由不平路面傳給車架或車身的沖擊力,并衰減由此引起的振動。由于車輛行駛環境復雜多變,尤其是在空曠無人的戈壁灘、高速公路橋隧路段、山谷隧道出口以及臨崖公路很容易出現強橫風,操作稍有不慎,車輛很容易偏離行駛軌跡,甚至發生翻車的危險,為提高行駛平順性,國內外研究主要集中在通過調節阻尼大小從而減小車輛振動的主動懸架系統和半主動懸架系統[1-5]。在參考文獻[6]中Zhang等總結了道路車輛橫風穩定性風險分析的方法,提出并詳細分析了作用在運行車輛上的風力和力矩的非平穩模型;參考文獻[7]中王德軍等針對側風干擾情況下的車輛穩定性和通訊問題,建立了V2X模型,根據反步控制的思想提出了車輛穩定性控制策略。目前尚未見強橫風對半主動懸架車輛安全性的影響等相關方面的研究。本文基于Carsim軟件建立整車動力學和A級路面立體模型,在Simulink 中建立基于橫風作用的半主動懸架模糊PID 控制系統,設計并研制阻尼連續可調的減振器及其控制系統,通過Carsim 和Simulink 聯合仿真和實車道路試驗,驗證模型的正確性和控制系統的有效性。
1 模型建立
1.1 整車動力學模型
CarSim 是專門針對車輛動力學的仿真軟件,本文利用Carsim 軟件建立整車動力學模型,車輛外形選取Carsim 軟件系統中的D 級四門轎車,發動機最大功率150 kW,6擋變速器,四輪均選用獨立懸架系統。
1.2 路面模型
路面模型采用濾波白噪聲的隨機路面輸入時域模型。

式中:x0(t)為路面位移;f0為下截止頻率,取0.01;
G0為路面不平度系數,取16×10-6,ω(t)為均值為0、強度為1的均勻分布白噪聲。將該路面模型轉換成3D路面,加載到Carsim系統中。
2 半主動懸架模糊PID控制系統
傳統的半主動懸架控制系統是通過車輛垂直振動加速度決定半主動懸架的阻尼系數大小,并沒有考慮橫風對懸架控制系統的影響。本文提出一種阻尼系數修正控制方法,在傳統控制器的輸出端疊加一個阻尼系數修正量,即可以使橫風對車輛運行姿態的影響很好地反映在阻尼系數上,阻尼系數修正量的大小由模糊控制器輸出。建立的基于橫風的半主動懸架模糊PID(Proportional Integral Derivative)控制系統原理如圖1所示。
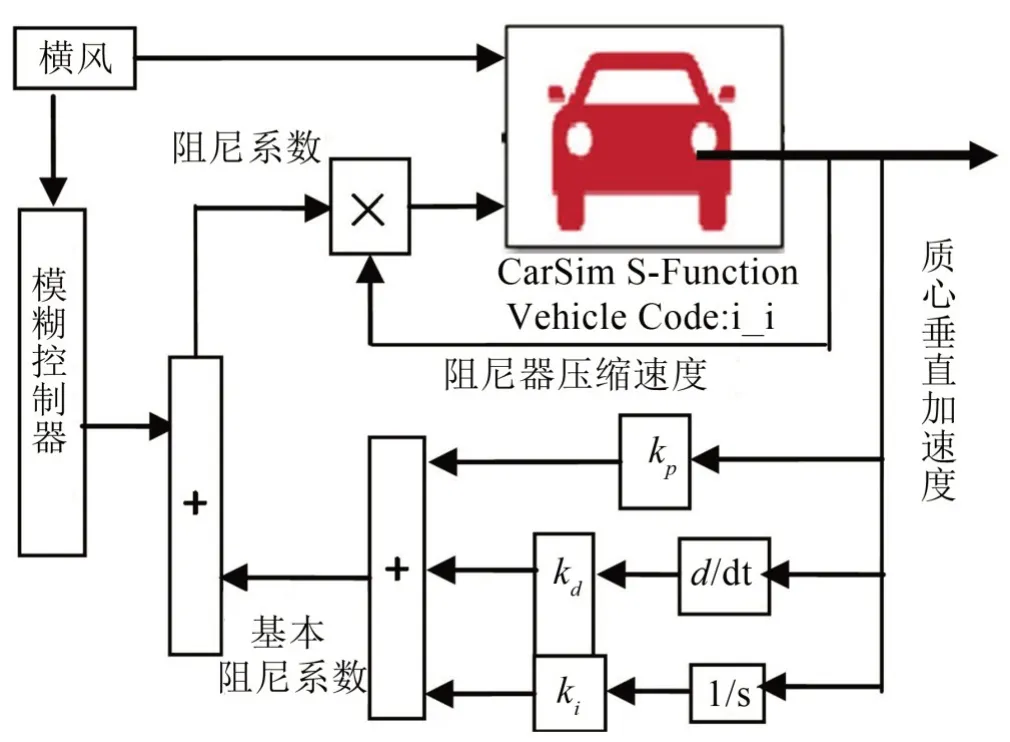
圖1 半主動懸架模糊PID控制系統
從圖1可以看出,PID控制器根據車輛質心垂直加速度輸出各輪半主動懸架基本阻尼系數,模糊控制器根據橫風強度和方向對各輪半主動懸架的阻尼系數進行修正,從而確定出此時各輪半主動懸架系統最終需提供的阻尼系數大小,將阻尼系數與各輪半主動懸架阻尼器的壓縮速度相乘即可得到阻尼力,并與強橫風共同加載到Carsim 整車動力學模型中。
阻尼系數修正原則:在橫風強度比較大的時候主要考慮車輛安全性,橫風強度越大,就減小靠近橫風一側半主動懸架的阻尼系數,或增大另一側懸架的阻尼系數,從而使車身迎著橫風有更大的傾斜量,這樣有利于提高車輛的橫向穩定性。汽車有四個獨立的懸架系統,所以模糊控制器為兩輸入四輸出控制系統,輸入參數分別為橫風強度和橫風襲來方向,輸出參數分別為左前輪、右前輪、左后輪和右后輪半主動懸架阻尼系數修正量,橫風強度的論域劃為6個模糊子集{ZE(零),S(小),MS(中小),M(中),MB(中大),B(大)};橫風從車輛右側襲來為正,從車輛左側襲來為負,以正向橫風為例,將橫風方向的論域劃為6 個模糊子集{ZE(零),S(小),MS(中小),M(中),MB(中大),B(大)};阻尼系數修正量論域劃為6個模糊子集{NB(負大),NM(負中),NS(負小),ZE(零),PS(正小),PM(正中),PB(正大)};各語言變量的隸屬度函數選用三角形,模糊控制規則選用Mamdani型,以橫風從車輛右側來襲為例,各輪模糊控制器的具體模糊控制規則如表1至表4所示。
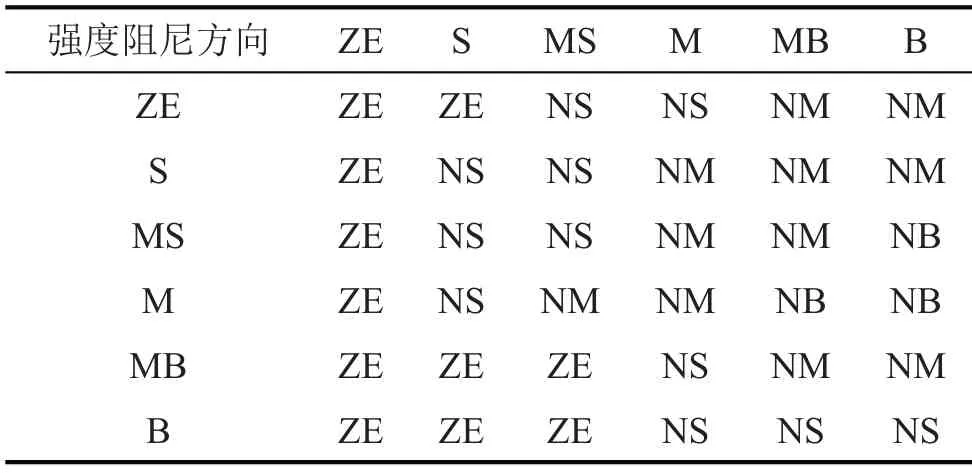
表2 右前輪模糊控制規則
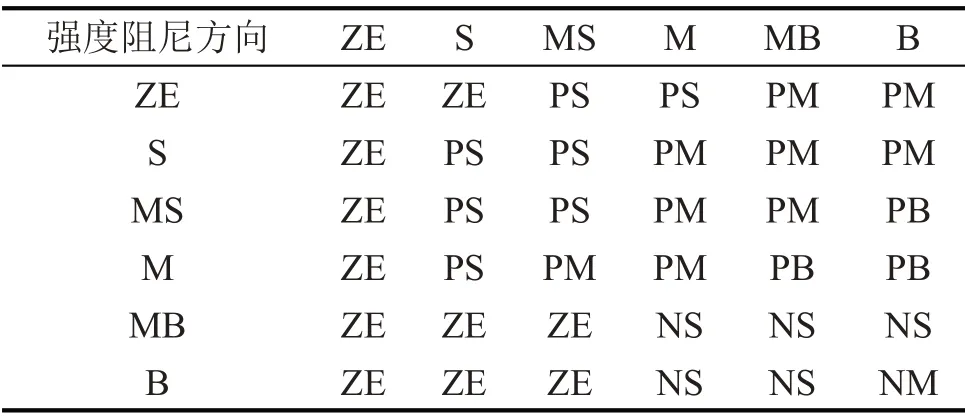
表3 左后輪模糊控制規則
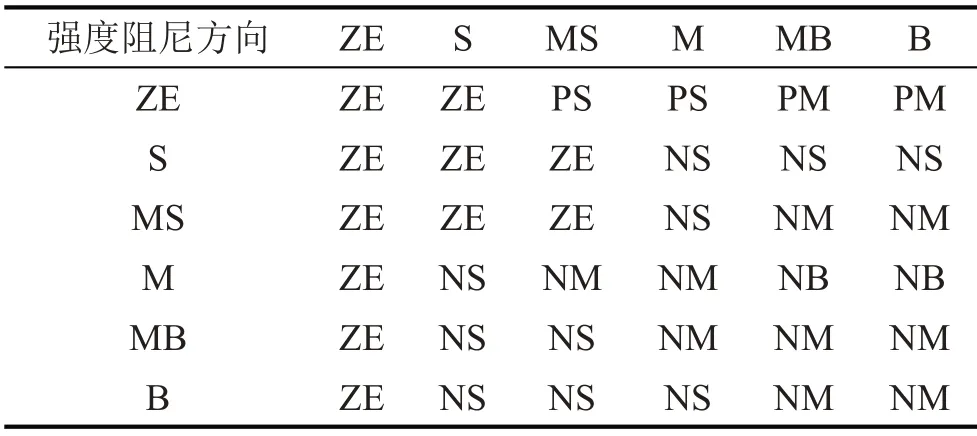
表4 右后輪模糊控制規則
3 PID控制器參數粒子群優化
PID控制器性能的優劣很大程度上取決于參數Kp、Ki、Kd的選取[8-10],通過人工試湊很難找到最優的參數,所以有必要采用智能優化算法找到理想的控制器參數。粒子群算法具有對整個參數空間進行高效并行搜索的特點,所以本文利用粒子群算法對PID控制器的參數Kp、Ki、Kd進行整定。
本文選取質心垂直加速度和車身側傾角速度作為半主動懸架的性能指標,由于質心垂直加速度和車身側傾角速度的單位以及數量級均不一致,因此將其除以各自相應的被動懸架性能指標值表示粒子群算法的適應度函數。該優化問題表述如下:
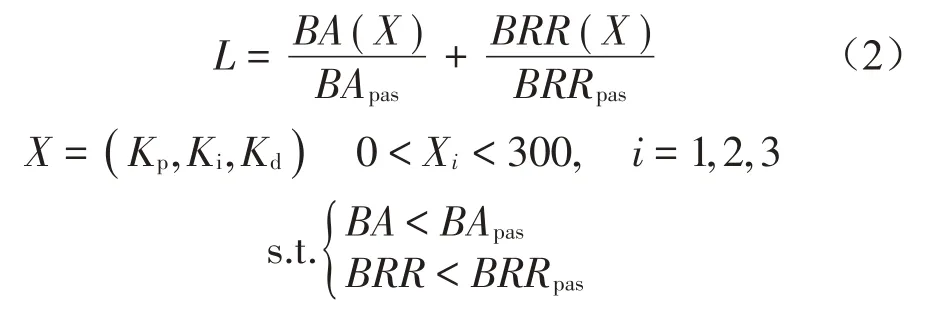
其中:BA、BRR分別代表車身垂直加速度和車身側傾角速度的均方根值;BApas、BRRpas代表被動懸架的相應性能;優化變量X為PID 控制器的參數Kp、Ki、Kd。基于粒子群算法的半主動懸架PID控制器參數優化過程示意圖如圖2所示。
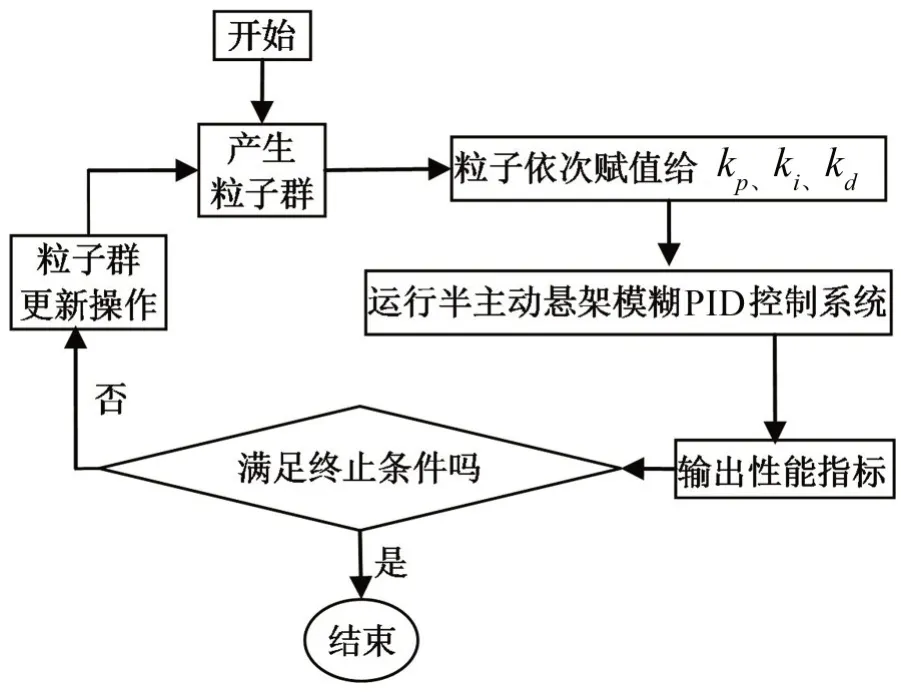
圖2 粒子群算法優化半主動懸架PID控制器參數
運用粒子群算法優化半主動懸架PID 控制器參數Kp、Ki、Kd時,設置粒子群優化的參數為:粒子群規模為100,慣性因子為0.6,加速常數為2,維數為3,速度范圍為[-1,1],最大迭代次數為100。
4 仿真結果分析
為驗證控制系統的有效性,在MATLAB R2016和Carsim2016 環境下建立整車動力學模型及其模糊自調整控制系統,進行仿真計算及分析。仿真計算時,橫風速度設定為60 km/h,橫風從車輛正右側向車輛襲來,車輛行駛速度設定為100 km/h,路面等級選取為A級路面,路面附著系數設定為0.85,結果聯合仿真,結果如圖3和表5所示。
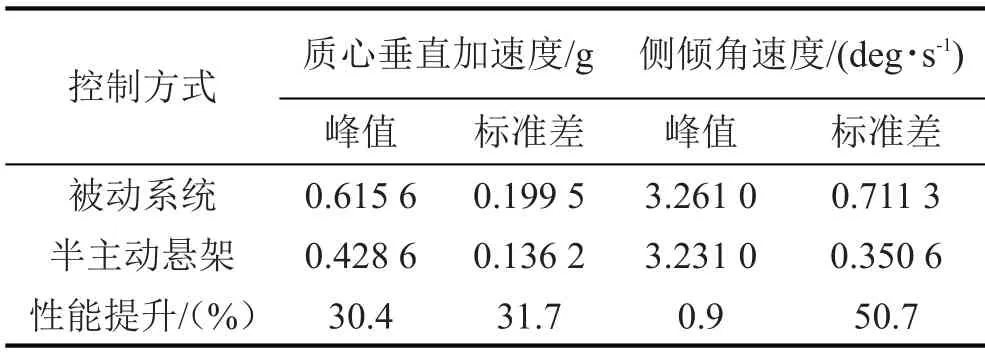
表5 仿真的結果比較
從圖3、表5中可以看出,與被動懸架系統相比,經過半主動懸架模糊PID 控制后,車輛的質心垂直加速度峰值和標準差均下降了30%以上,車身側傾角速度的標準差下降了50.7%。
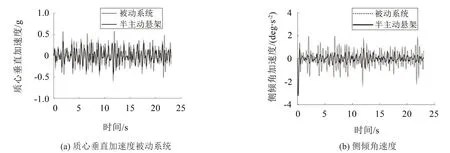
圖3 仿真結果
5 實車道路試驗
為考察半主動懸架模糊PID控制策略的有效性和可靠性,設計了一種阻尼連續可調的減振器,并通過減振器臺架試驗,利用4 階擬合得到可調式減振器阻尼力與步進電機轉角之間的關系曲線。其函數關系式為:

其中:θ為步進電機的轉角,范圍為[0°,30°],c為可調減振器的平均阻尼力,范圍為[0.54 kN,1.15 kN]。圖4為加裝步進電機的可調阻尼減振器實物圖。

圖4 可調阻尼減振器
將陀螺儀、轉向盤轉角傳感器、可調阻尼減振器和控制系統硬件等裝車進行了道路試驗,進行了車速60 km/h、6級橫風約40 km/h速度從右側襲來的實車道路試驗,路面為平直的水泥路面。現場儀器安裝如圖5所示。分別進行了被動系統和半主動懸架模糊PID控制的試驗,結果如圖6所示。

圖5 儀器安裝現場
從圖6中可以看出,與被動懸架系統相比,經過半主動懸架模糊PID 控制后,車輛質心垂直加速度峰值下降了32.2%,標準差下降了30.4%,車身側傾角速度峰值下降了20%,標準差下降了25.7%,改善平順性的同時提高了車輛安全性。
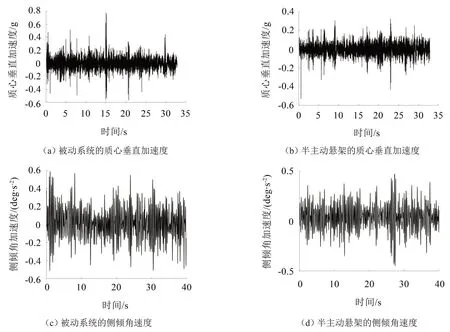
圖6 試驗結果
6 結語
(1)設計了一種基于橫風的半主動懸架模糊PID控制系統,利用粒子群算法全域尋優PID控制器參數,PID 控制器根據車輛質心垂直加速度確定半主動懸架的基本阻尼系數,模糊控制器依據橫風強度和襲來方向對各輪阻尼系數進行修正,與基本阻尼系統疊加后即可確定出當前行駛工況下半主動懸架的阻尼系數。
(2)設計并研制了一種阻尼系數連續可調減振器,通過臺架實驗獲得阻尼力與步進電機轉角的關系曲線。MATLAB 和Carsim 聯合仿真和實車道路試驗結果表明,在強橫風作用下,與被動懸架系統相比,經過半主動懸架系統控制后的車輛具有更好的行駛平順性和安全性。