過海段管道溝槽開挖施工
2022-07-04 08:21:38魏曉鋒
陜西水利 2022年5期
魏曉鋒
(福建省水利水電工程局有限公司,福建 泉州 362000)
0 引言
水下開挖在疏浚工程和內河航道工程等施工項目中是較為常見的一種施工內容。抓斗挖泥船開挖通常情況下是采用抓斗挖泥船和自航泥駁配合施工,即將施工區土石方用抓斗挖泥船定位開挖,后將棄渣通過泥駁運至指定位置。本文探討了抓斗挖泥船在過海段管道溝槽開挖中的應用,提出具體的施工方案,保證開挖效果符合管道鋪設要求。
1 工程概況
本工程位于沙埕港后賴鎮附近,南岸與新建鋼鐵廠臨近,管線由后賴鎮引出過海,自北端防波堤下入海,通過沉管方式過海至鋼鐵廠上岸,起始點樁號K4+796;終點樁號K6+173,總長1377 m。過海沉管段管道最大埋設深度4.5 m,最小埋設深度1 m,平均埋設深度約3 m,兩端與陸上埋管相對接,過渡段為60 m~110 m。由于海上埋管段的海床大部分是淤泥(南岸登陸段有拋石區域),沉管采用先開挖后敷設管道的施工方式[1]。
2 水下開挖施工特點和難點
2.1 水下開挖施工特點
(1)地質情況多為淤泥質和拋填塊石。根據地勘資料,施工區域地質大多數為淤泥地質,靠近兩岸部分為堤岸防沖刷拋填石塊;地質情況不同,管道溝槽開挖方式不同,岸上需要采用長臂挖掘機配合開挖。
(2)受潮汐影響較大,精度控制要求高。施工區穿越沙埕港水道,海水的水位受潮汐水的影響,高低潮位差值較大,在落潮期間有一定的水流速度,直接影響挖泥船開挖以及軸線和深度測量,對測量精度要求高。
2.2 水下開挖施工難點
(1)高低潮位差值較大。施工區潮汐水屬正規半日潮,落潮速大于漲潮速,據(1969 年~1975 年)潮位觀測資料統計(黃海高程)本區最大潮水為5.00 m,最小潮位-2.90 m,最大潮差7.90 m,最小潮差2.60 m,平均潮差2.30 m,平均高潮3.25 m,平均低潮-2.05 m。施工過程中,海水的水位受潮汐水的影響,呈規律性變化,需要根據潮位情況,實時調整開挖深度控制。
(2)開挖測量精度要求高。從設置高精度基準,到實地小環境的測試對比,再到定深控制和找平控制,每個環節均要結合潮汐水位情況,盡可能提高精度降低誤差,才可為后續鋪管提供符合要求的溝槽。
(3)涉及養殖區域,工期要求高。沙埕港海域兩岸有養殖區域,對于靠近北岸的350 m 區間為當地村民的水產養殖區,為了本項工程的實施,已經將養殖魚排拖出一道約150 m的口,但需要在1 個月內結束魚排養殖區的管道敷設施工,滿足政府與養殖戶簽訂的回遷期限。因此,施工工期較短,水上施工會受到一定限制和影響。
3 水下開挖溝槽方案設計
結合本施工區域的地質情況、管道埋深情況、潮汐水位情況以及周邊地理環境,采用抓斗式挖泥船進行水下溝槽開挖施工,先后采用大型抓斗和小型抓斗挖泥船施工;所用船舶設備包括:抓斗挖泥船(8 m3)1 艘、自航泥駁(1500 m3)2 艘、拋錨艇(740 HP)1 艘、DGPS 定位系統2 臺,同時配備足夠的錨泊定位、測量控制、潛水作業、資料收集整理等的施工輔助船舶和人員。為避免挖泥船與鋪管船施工作業的相互干擾,挖泥船與鋪管船間隔10 天施工,避免交叉施工影響鋪管船的施工效率[2]。
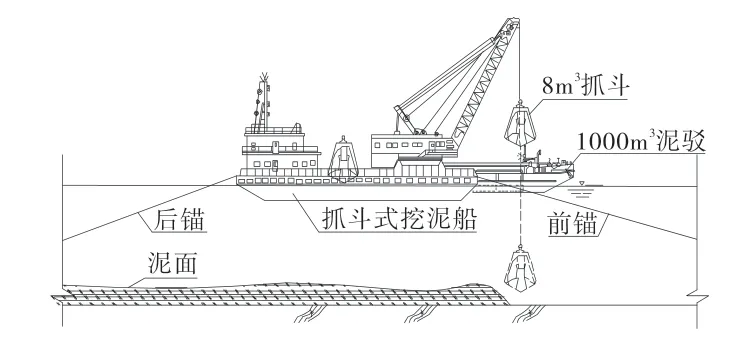
圖1 抓斗挖泥船開挖示意圖
4 水下開挖溝槽施工
首先對業主提供的測量控制點校核并建立GPS 基站和施工測量控制網,結合船載GPS 作為施工船導航定位;之后按施工圖紙要求進行溝槽基準線放樣;利用挖泥控制軟件指示挖泥船定位后進行分層粗挖,再對底部的0.5 m 部分進行找平開挖。
開挖施工首先采用8 m3抓斗挖泥船分層開挖,每層開挖深度控制在2 m 左右,粗挖基本完成后調換為小抓斗挖泥船進行細挖找平,直到滿足溝槽尺寸、高程、平整度的要求。運泥和拋泥采用自航泥駁全過程配合施工。
4.1 DGPS 定位參數確定
根據基站和施工控制網控制點,建立基準臺,采集控制點坐標,計算并校核施工用DGPS 數據轉換參數,保證誤差在0.5 m 范圍內。
4.2 分層開挖設計
開挖方式采用分區、分段、分條進行,分層開挖深度為2 m 厚,抓斗式挖泥船每一分段長度為100 m 左右,每一分條寬度為12 m 左右,如分段分條示意圖所示。依據實際需開挖深度,分兩層階梯式開挖,先開挖成鋸齒狀,后自然坍塌成坡,最后進行局部邊坡修理形成1∶4 邊坡。分條開挖步驟:
(1)通過船載DGPS 系統,將挖泥船定位在圖中①條幅位置,按箭頭方向進行該條幅開挖施工;
(2)①條幅完成后,將挖泥船移到②條幅位置進行開挖作業,挖泥方向按箭頭與①一致;
(3)按上述方法,進行第③條幅挖泥作業;每個條幅之間重疊1 m 左右開挖,防止漏挖;
(4)緩坡段開挖在表層土方開挖時,長度方向一并挖除到位;軸線兩側的放坡區域根據挖出的泥質情況確定自然坍塌程度選擇開挖深度和控制開挖量,以保證溝槽能夠順利成型為基本條件;
(5)主溝槽的加深開挖是在表層泥土開挖全部完成后,將挖泥船重新定位后進行。
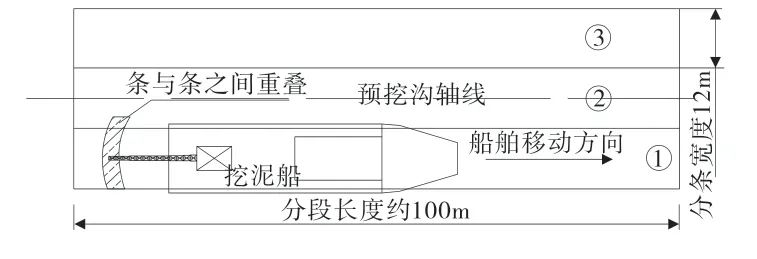
圖2 分段及分條示意圖
4.3 輸入施工區坐標
根據施工安排,將相關控制坐標計算出來后輸入測控手薄和施工軟件,即可將施工范圍顯示在顯示器上。平面分區圖全部采用CAD 軟件繪制,坐標系統與施工用坐標系統一致,直接將CAD 圖電子版輸入船載DGPS 系統,直觀形象地指揮挖泥船開挖施工[3]。
按溝槽方向對施工區進行分段并標明里程,每一段施工區內按縱橫網格分隔,之后再根據抓斗的操作尺寸,劃分成小網格;將施工圖中開挖輪廓線和劃分好的開挖網格圖合并導入控制系統,由測量軟件操作,開挖時根據測量控制軟件按照小網格到大網格順序施工。
4.4 挖泥船定位
抓斗挖泥船采用DGPS 定位系統定位。定位前,由施工技術人員打開挖泥軟件,通過電腦顯示器直觀地操作挖泥,保證施工平面尺寸符合設計要求。
挖泥船有6 口錨,根據錨位設計要求,甲板駁兩頭呈“八字”形布設交叉錨位,工程船首尾設置牽引錨纜,根據水深情況,前進方向的錨纜長度盡量放長,船尾的錨纜盡量放短;為防止工程船受潮流、風向、管線路由影響,艏艉交叉錨纜始終呈受力狀態,開挖管溝施工期間,船舶移動過程盡量做到前后錨纜的松放、收緊呈同步狀態。
高程控制采用“雙控”模式,即岸上水尺與船載GPS 報潮相結合的模式。岸上在四道溝設置水尺,安排專人進行潮位觀察,每30 分鐘向施工船舶報潮位一次;施工現場專門安排一船舶,上設GPS 報潮系統,觀察現場潮位情況,實時與岸上水尺讀數比對并進行調整,避免施工作業線過長而產生的潮位差。
4.5 挖泥船挖泥
挖泥船挖泥過程中要嚴格控制抓斗下落深度和開挖范圍線,特別是最后一層開挖時抓斗的下落深度控制,直接影響溝槽的底部平整度和高程;施工過程中采用測深水砣對水深進行校核,避免浮動泥漿影響水深測量。開挖施工時,控制前一斗和后一斗抓斗重疊約0.5 m 左右,防止已開挖和未開挖泥面高差導致抓斗上鋼絲繩傾斜,影響開挖精度[4]。
在開挖過程時,根據施工圖紙尺寸施工,定時校核DGPS系統、水深、潮汐水位等,做好數據記錄和施工過程情況記錄,確保施工平面平整度、開挖尺寸及高程滿足鋪管要求。
4.6 找平施工
溝槽設計底高程以上0.5 m~1.0 m 為找平施工。采用小抓斗(6m3)挖泥船進行細挖施工,小抓斗挖泥船應滿足定深和找平的需求。溝槽找平細挖施工方向和粗挖一致,按照粗挖方案分段分條進行,根據挖泥控制系統控制挖泥船的縱向和橫向位置;將高精度RTK 接收器安裝在挖泥船的小抓斗上,采用三維坐標基準,實現精確細挖施工。為保證找平精度,整個找平細挖施工過程應選擇風浪較小時施工,最好應在平潮段施工,避免水流流動造成開挖誤差。
5 質量安全控制措施
(1)起吊挖溝機前,認真檢查吊索、吊具是否合格,有無磨損、銹蝕、變形、斷裂等情況,禁止超負荷使用,檢查吊點是否牢固。起吊過程中,鉤頭中心應在挖溝機重心線上,起吊隔離區禁止人員進入,嚴禁多人指揮。
(2)船舶移動時,密切觀察張力變化情況,控制好行進速度。潛水員未出水上甲板,禁止啟動挖溝設備。
(3)在挖溝機操作設備的危險區拉警界線,懸掛警示牌。在挖溝過程中應經常查看吊索磨損情況,發現磨損立即更換。
(4)挖溝機回收,起吊過程中,應監視吊鉤受力情況,發現異常,潛水員下水檢查和處理,防止挖溝機掛異物,損壞設備。
(5)拋泥船嚴禁超載、超限,并做好淤泥的防滲漏措施。拋泥船要嚴格按照法律要求和施工方案,到指定位置按要求進行拋泥,嚴防環境污染事件的發生。作業時應防止錨和錨纜對周圍管線造成損壞,嚴防人員誤操作挖斷、船舶擱淺損壞周圍管線。
(6)復雜海區、狹窄水道航行時要加強值班瞭望,應急指揮小組要定時收聽和向海事局了解掌握氣象資料,根據當地情況決定是否進港避風。制定應急預案,發生碰撞、失火、人員落水等緊急情況時,聽從應急領導小組的指揮按照應急預案進行急救,把損失減到最小程度。
6 結語
綜上所述,結合本工程的特點及施工條件,選用合理的開挖方式,通過水下開挖溝槽方案設計、挖泥船定位、挖泥找平施工,控制溝槽開挖的精度,保證后續鋪管施工順利完成。經本案例項目施工效果驗證,抓斗挖泥船施工技術可精準控制水下開挖,可供類似工程參考借鑒。
猜你喜歡
輪胎工業(2021年10期)2021-12-24 17:23:35
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
輪胎工業(2020年9期)2020-03-01 18:58:44
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
江西理工大學學報(2015年3期)2015-12-22 05:26:21
