起重機自動抓具模擬體研究★
2022-07-07 10:03:14林鈺茗霍貴龍胡敦忠薛毅馨
機械管理開發(fā) 2022年5期
林鈺茗, 霍貴龍, 胡敦忠, 薛毅馨
(1.華能山東石島灣核電有限公司, 山東 威海 264200;2.太原重工股份有限公司技術(shù)中心, 山西 太原 030000;3.太原重工股份有限公司起重機分公司, 山西 太原 030000)
引言
某起重機是乏燃料貯存系統(tǒng)中的重要設(shè)備,用于反應(yīng)堆運行時乏燃料的貯存和排空堆芯時燃料元件的暫存。其功能是按指令要求將乏燃料貯罐運送和吊裝到指定位置;并在需要時,按指令將乏燃料貯罐從指定位置吊出,經(jīng)轉(zhuǎn)運孔裝入屏蔽轉(zhuǎn)運罐內(nèi)外運,或運行至裝料位置通過抽吸的方式將暫存的燃料元件送回堆芯。自動抓具結(jié)構(gòu)簡圖如圖1 所示。
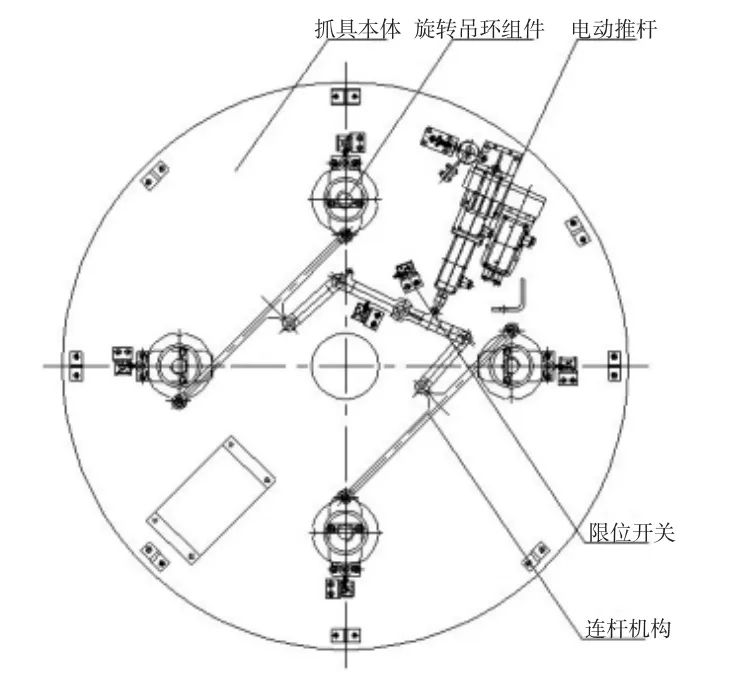
圖1 自動抓具結(jié)構(gòu)簡圖
用于該起重機的自動抓具主要包括抓具本體、連桿機構(gòu)、旋轉(zhuǎn)吊環(huán)組件、電動推桿和限位開關(guān)等[1]。抓具上的電氣設(shè)備和電纜及儀控信號線進行輻射屏蔽,或采用耐輻照的產(chǎn)品,抓具的鋼屏蔽厚度要求不少于150 mm,抓具上方的各類線纜和電氣設(shè)備被鋼屏蔽充分保護。自動抓具遵循失電安全的設(shè)計原則。機構(gòu)布置如下:電動推桿推動四連桿機構(gòu)的一點,四連桿機構(gòu)連接4 個卡爪。
參考工程主機用自動抓具,設(shè)計制造一套模擬體,尺寸比例按照1∶1,主要模擬其外形、整體質(zhì)量、驅(qū)動機構(gòu)、手動打開機構(gòu)等。研發(fā)完成的模擬體用于后續(xù)現(xiàn)場人員的技能培訓(xùn),該模擬體是本文的研究對象。
1 機構(gòu)仿真研究
通過多體動力學(xué)仿真分析軟件ADAMS[2],對自動抓具模擬體機構(gòu)進行動力學(xué)仿真,模擬機構(gòu)在實際工況下的運動,計算電動推桿在工作過程中推壓力的變化曲線。機構(gòu)仿真模型示意圖如圖2 所示。
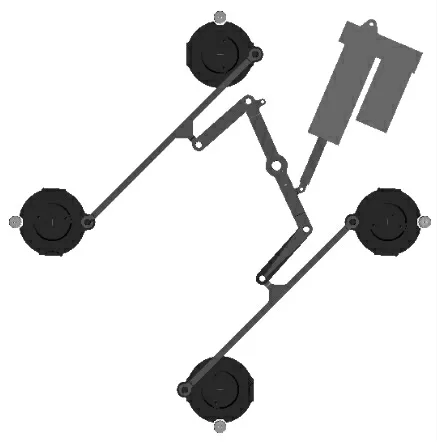
圖2 機構(gòu)仿真模型示意圖
將模型中各運動部件分別定義為不同的連桿,將電動推桿本身設(shè)為滑動副(E),通過運動函數(shù)為其定義驅(qū)動(Motion)。將電動推桿與連桿裝置設(shè)為圓柱副(D),連桿裝置與吊鉤旋轉(zhuǎn)裝置間設(shè)為圓柱副(A3、A4、B3、B4)吊鉤旋轉(zhuǎn)裝置與吊具本體間設(shè)為圓柱副(A5、A6、B5、B6),且吊鉤旋轉(zhuǎn)裝置與吊具本體間設(shè)置體對體的接觸。兩種方案均考慮鉸接和接觸位置的摩擦力。各運動副位置示意圖如下頁圖3 所示。
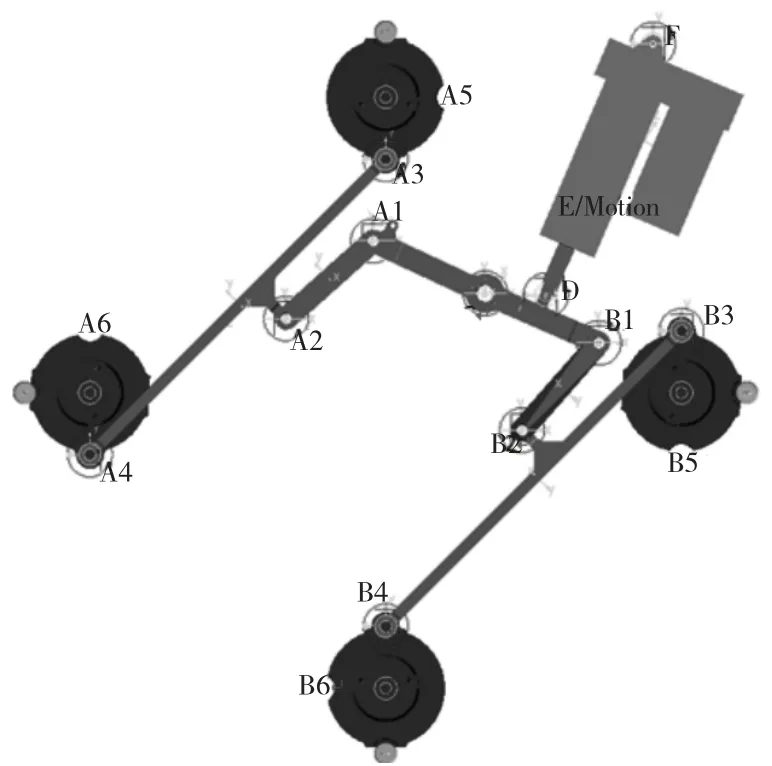
圖3 各運動副位置示意圖
驅(qū)動電動推桿的運動函數(shù)也分為3 種情況討論,以分析在不同速度曲線下電動推桿推壓力的變化:
通過位移進行驅(qū)動:step(time,0,0,8,76.1)。
通過速度進行驅(qū)動:step(time,0,0,1,step(time,7,10.86,8,0))。
通 過 速 度 進 行 驅(qū) 動:step(time,0,0,0.5,step(time,7.5,10.15,8,0))。
對機構(gòu)進行仿真計算,可以得到以下結(jié)果:
1)以位移進行驅(qū)動時,推壓力變化如圖4-1 所示,此時推壓力的最大值為658 N;
2)以速度2 進行驅(qū)動時,推壓力變化如圖4-2 所示,此時推壓力的最大值為662 N;
3)以速度3 進行驅(qū)動時,推壓力變化如圖4-3 所示,此時推壓力的最大值為665 N。
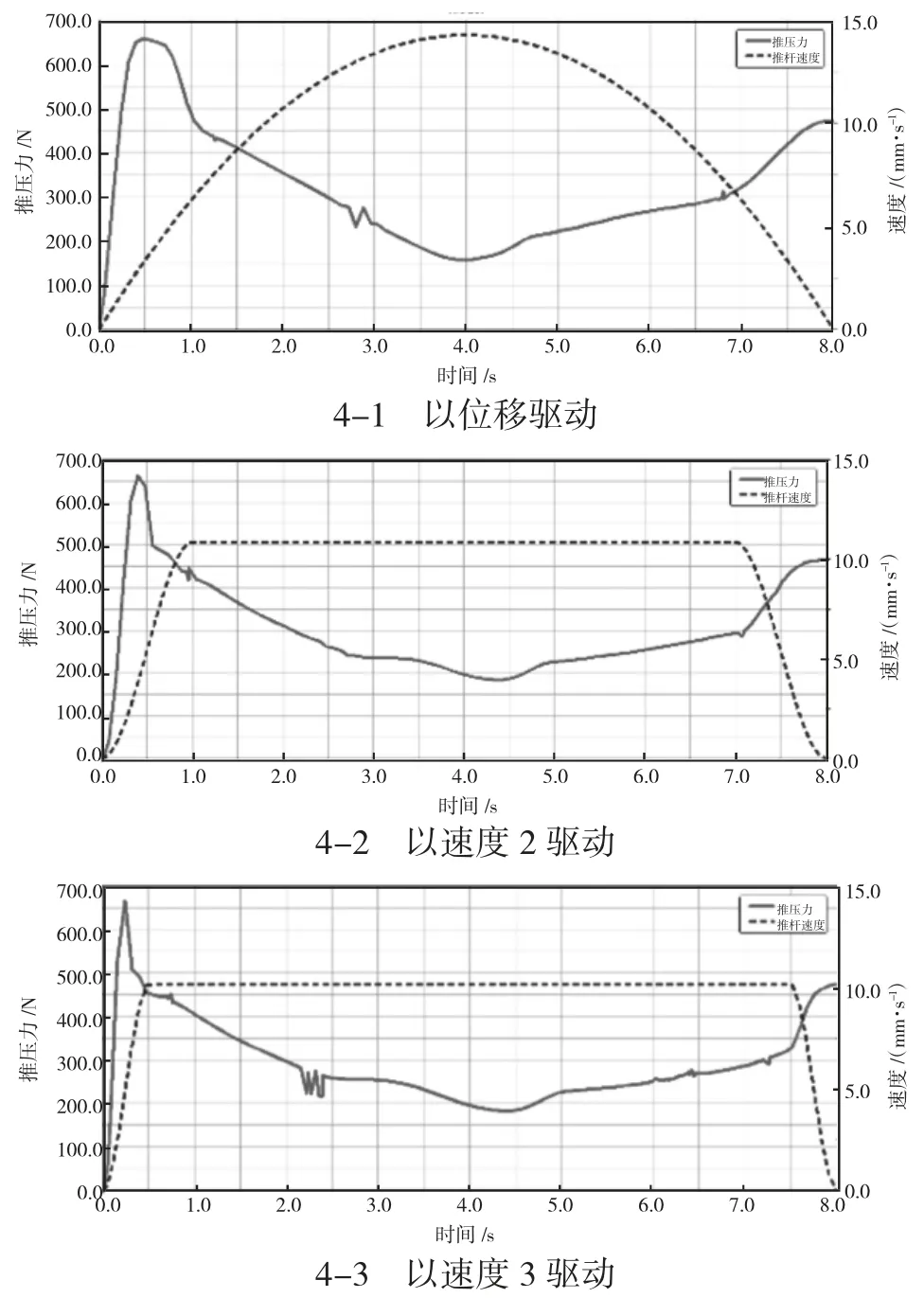
圖4 電動推桿速度和推壓力變化曲線
對上述仿真結(jié)果進行簡單驗證。此時,取消電動推桿上的主動驅(qū)動(Motion),對其施加大小為700 N的作用力,可以看到整個機構(gòu)可以完整的完成一個工作循環(huán),可以驗證上述所求的推壓力有效。
用不同的驅(qū)動方式進行推桿驅(qū)動,所得到的推壓力變化趨勢一致,最大值也非常接近。可以認為在正常的速度變化范圍內(nèi),速度曲線對推桿的推壓力影響較小。推壓力的最大值均小于900 N,電動推桿速度均在8~15 mm/s 的范圍之內(nèi)。
2 電動推桿研究
2.1 電動推桿結(jié)構(gòu)及工作原理
電動推桿由電動機、二級減速器、絲桿、推桿組件等組成。電動推桿利用電動機動力帶動二級減速器,從而推動推桿的前后運動。本電動推桿采用水平安裝方式,在減速器箱體蓋及推桿端部分別設(shè)有安裝孔,并將推桿端部設(shè)計為周向360°萬向節(jié),可根據(jù)現(xiàn)場安裝條件調(diào)整角度,以便于安裝。
當(dāng)電動機通電時,電動機帶動二級減速器,使得絲杠在齒輪的帶動下運動,絲桿通過梯形螺紋推動推桿組件向前運動,當(dāng)推桿運動到一定程度時,推桿組件會壓動行程限位開關(guān),使得推桿停止。當(dāng)電動機通反向電時,電動機帶動二級減速器,使得絲杠在齒輪的帶動下運動,絲桿通過梯形螺紋推動推桿組件向后運動。當(dāng)推桿運動到一定程度時,推桿組件會壓動行程限位開關(guān),使得推桿停止。當(dāng)電動推桿在工作過程中推力大于極限值時,電動推桿會壓動過載保護裝置使得推桿安全停止。
2.2 電動推桿技術(shù)參數(shù)
某核電站起重機自動抓具采用電動推桿為動力,滿足如下要求:
1)耐核輻射,控制設(shè)備劑量率為1.32×102rad/h,累積劑量為2×107rad;
2)耐腐蝕,主要外露材質(zhì)為不銹鋼;
3)采用耐輻照潤滑;
4)采用免維護軸承。
因以上要求的特殊性,原主機電動推桿委托廠家專業(yè)定制。模擬體電動推桿用于培訓(xùn)操作,無上述要求限制,因此可選用接近或滿足要求的標準電動推桿。兩種推桿的參數(shù)對比見下頁表1。
從表1 中對比可以看出,選用的標準電動推桿滿足模擬體基本使用要求,質(zhì)量比原電動推桿減輕31 kg,并且可大幅度降低成本。

表1 模擬體與原設(shè)備用電動推桿參數(shù)對比
2.3 電動推桿配重研究
模擬體用電動推桿重量輕,會對自動抓具的模擬可靠性產(chǎn)生影響,需要加入配重結(jié)構(gòu),來保證模擬體重量和重心位置基本保持不變。電動推桿配重結(jié)構(gòu)如下頁圖5 所示。
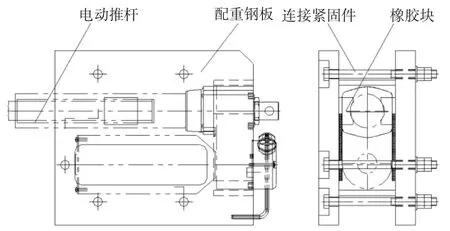
圖5 電動推桿配重結(jié)構(gòu)圖
配重結(jié)構(gòu)主體由兩塊鋼板組成,放置于電動推桿兩側(cè),鋼板采用筋板加緊固件進行連接,并設(shè)置有橡膠塊等保護電動推桿。合理布置鋼板規(guī)格,整個配重結(jié)構(gòu)質(zhì)量為31 kg;合理布置緊固件相對鋼板的固定位置,保持現(xiàn)模擬體電動推桿加配重后的重心位置和原主機電動推桿重心位置保持一致。
2.4 電動推桿與連桿機構(gòu)接頭研究
原電動推桿與連桿機構(gòu)接口是模擬體用電動推桿接口是圓柱體上開圓孔。另外,模擬體電動推桿長度略小于原電動推桿。兩種接口對比如圖6 所示。
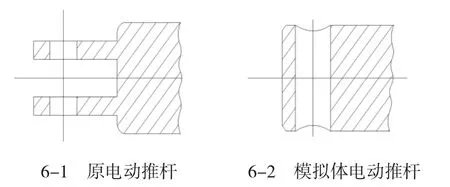
圖6 電動推桿與連桿機構(gòu)接口對比
為解決接口不一致的問題,增加連接件用以完成不同接口的轉(zhuǎn)換。連接件連接連桿機構(gòu)和模擬體電動推桿,與連桿機構(gòu)連接部分采用和原電動推桿相似的接口形式。連接件和模擬體電動推桿連接在一起的兩端長度和原電動推桿長度相同,因此保證了模擬體和原設(shè)備各部件之間連接的一致性。圖7 為電動推桿增加連接件示意圖。
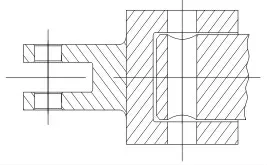
圖7 電動推桿增加連接件示意圖
2.5 新舊電動推桿對比
經(jīng)上述研究,通過增設(shè)連接件,合理設(shè)計配重結(jié)構(gòu),將連接件、電動推桿、配種結(jié)構(gòu)結(jié)合在一起,在接口型式、長度尺寸、質(zhì)量、重心位置等方面,實現(xiàn)了模擬體電動推桿與原主機電動推桿保持一致,具體為:與連桿機構(gòu)連接接口均為扁平狀接口;初始位置電動推桿長度尺寸均為485 mm;質(zhì)量均為40 kg;重心均位于推桿套和電動機中間位置。原電動推桿和現(xiàn)電動推桿外形如圖8 所示。
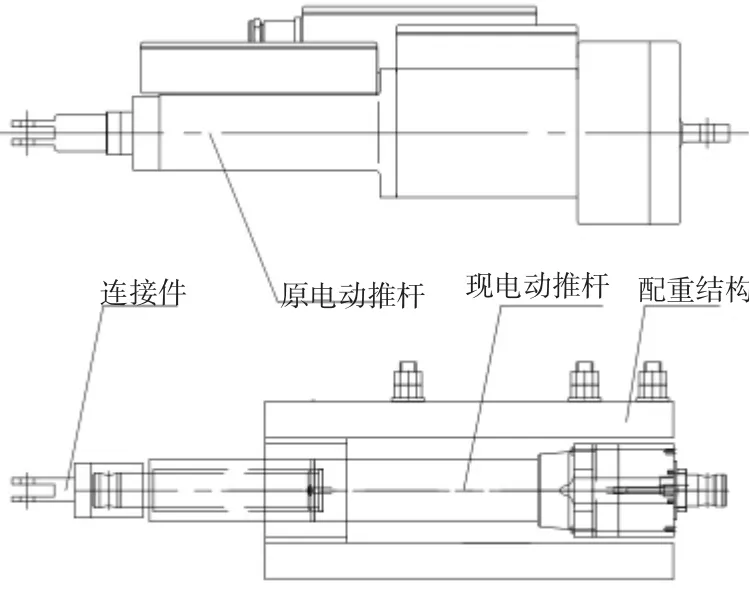
圖8 新舊電動推桿外形
3 限位開關(guān)研究
主機自動抓具采用行程限位開關(guān),在電動推桿初始行程位置和結(jié)束行程位置觸發(fā)。在模擬體自動抓具設(shè)計過程中,為了進一步節(jié)約成本及采購周期考慮,采用機械式限位擋塊替代電氣式行程限位開關(guān)。圖9是原限位開關(guān)和機械式限位擋塊對比圖形。
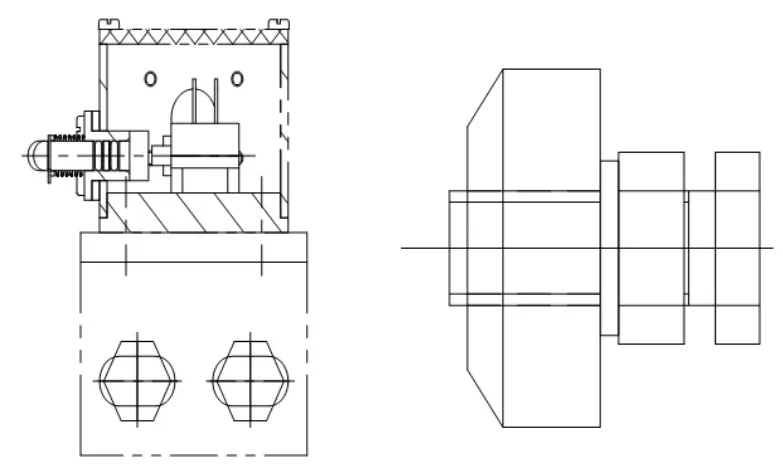
圖9 原限位開關(guān)和機械式限位擋塊
4 結(jié)語
本文針對某核電站起重機自動抓具模擬體進行研究,通過采用標準電動推桿、設(shè)計連接件和配重結(jié)構(gòu)、設(shè)計機械式限位擋塊的措施,滿足了模擬體1∶1尺寸比例的要求。本文的研究工作在滿足模擬體使用功能的基礎(chǔ)上,顯著降低了產(chǎn)品成本,縮短了生產(chǎn)周期。
