煤礦輔助運輸系統智能化現狀分析及框架設計研究
2022-07-07 17:13:40常凱劉志更袁曉明李媛
工礦自動化 2022年6期
常凱, 劉志更, 袁曉明, 李媛
(1. 中國煤炭科工集團太原研究院有限公司,山西 太原 030006;2. 山西天地煤機裝備有限公司,山西 太原 030006;3. 山西晉中理工學院 文法學院,山西 晉中 030600)
0 引言
為提升煤礦智能化水平,2020年2月25日,國家發展改革委、國家能源局等八部委聯合印發了《關于加快煤礦智能化發展的指導意見》,國內煤礦開始啟動并加快推進礦井智能化建設。輔助運輸作為煤礦生產的準備環節,擔負著全礦井生產所需人員、物資及設備的中轉和運輸工作,其智能化對于提高礦井生產效率和確保礦井安全有著重要意義。
國內外露天煤礦的智能輔助運輸系統已經實現了礦用卡車在固定路段內的無人駕駛、自動裝載、自動卸載、主動避障、智能調度等功能,工程實踐也取得了不錯的應用效果。但井工煤礦的智能輔助運輸系統還不健全,除了不完善的車輛智能調度系統、為數不多的駕駛輔助系統、局部的無人駕駛場景展示外,研究目標和范圍還比較模糊。一方面是因為輔助運輸系統建設需要的管控平臺、高速工業互聯網絡、井下配套設施等基礎環境有待重新建設或升級,智能化專業人才隊伍也有待組建。井下一些場景尚處于人工輔助、機械化和半自動化的狀態,核心技術、核心元部件、核心裝備研發滯后較多,直接過渡到智能化顯得力不能及。另一方面一個很重要的因素是輔助運輸系統智能化的建設框架還不夠清晰,面對煤礦輔助運輸系統智能化的市場需求,現有系統的智能化功能還不夠完善,裝備的智能化程度仍有待提升。現有的煤礦輔助運輸系統智能化應用僅是在已有的技術、系統和裝備上增加一些智能化的元素,達不到系統融合產生的綜合效果[1]。
本文簡要總結了國內外煤礦輔助運輸智能化技術的應用現狀,重點分析了井工煤礦輔助運輸智能化存在的問題,從輔助運輸系統功能角度出發,設計了煤礦輔助運輸系統智能化框架,為輔助運輸系統智能化建設和發展提供研究思路。
1 國內外煤礦輔助運輸智能化現狀
1.1 露天煤礦輔助運輸智能化現狀
露天煤礦輔助運輸具有運行區段內人流量少、場景單一、運輸路線相對固定等優勢。礦用自卸卡車作為露天煤礦輔助運輸的主要裝備,采用無人駕駛方案可為露天煤礦開采運輸過程中存在的調度困難、人工成本高、能源消耗大、安全事故多發等突出問題帶來新的解決方案。國內外的礦業巨頭、煤機裝備和無人駕駛高科技企業紛紛涉足露天煤礦無人駕駛領域[2]。
早在20世紀末,隨著新一代信息技術快速發展,美國、德國等國家的露天煤礦采用先進的智能化連續開采技術,大幅提高了礦山的自動化水平及開采效率;礦用卡車無人駕駛也已經擁有使用幾百臺車、完成幾十億噸運載量的實際經驗,應用效果顯著。2019年4月,自動運輸系統(Autonomous Haulage System, AHS)應用在澳大利亞、南北美洲的礦山,已經完成超過20億t物資運輸,目前該系統已在10個礦山得到應用。2020年4月,美國卡特彼勒公司使用礦山之星系統(MineStar)移送的物資已達20億t[3]。
國內露天煤礦無人駕駛技術與裝備研究較晚,隨著地面無人駕駛相關感知、定位和控制等技術的日益成熟,2019-2021年,國內露天煤礦無人駕駛系統得到了工業化應用和推廣[4],主要應用在稀土礦(內蒙古包鋼股份白云鄂博礦區)、金屬礦(河南洛陽鉬業集團三道莊鉬礦、江西江銅集團城門山銅礦)、煤礦(華能集團伊敏露天礦、大唐國際寶利煤炭有限公司、準能集團黑岱溝煤礦、國家能源集團神華寶日希勒能源有限公司露天煤礦、國家能源集團神華新疆能源有限責任公司準東露天煤礦等)。其中國家能源集團神華新疆能源有限責任公司準東露天煤礦開展的5G+卡車無人駕駛技術應用試驗,在采場與排土場運距為3.5 km的路段內,實現了卡車運輸環節作業過程的完全無人自主運行。卡車平均運行速度達35 km/h,在標準運距和提升高度作業條件下,無人駕駛運行效率達到了有人駕駛平均效率的90%以上。通過階段性的露天煤礦無人駕駛連續運行試驗,試驗總里程達1.735×105km[5]。
1.2 井工煤礦輔助運輸智能化現狀
煤礦井下巷道空間狹小、岔路口多、粉塵大、濕度大、通風差,這些復雜環境對智能傳感器的感知質量非常不利。輔助運輸裝備在井下運行距離較長,覆蓋范圍較廣,相較一些固定場景的智能化系統,其實現智能化運行的難度較高。同時目前在井下受限空間內的精確定位技術、地圖構建技術、環境感知技術、自動裝卸和接駁技術、無人駕駛技術等核心關鍵技術攻關剛起步,尚不具備工業化應用基礎,致使井工煤礦的輔助運輸智能化發展緩慢。
隨著近幾年車輛定位與調度、機車綜合保護、駕駛輔助、無人駕駛等技術的發展,國內井工煤礦輔助運輸智能化建設取得了一定成果,如國家能源集團神東煤炭補連塔煤礦的車輛智能調度系統實現了系統綜合平臺信息化展示、人員及車輛實時定位、固定場景的狀態監測和回放、地面調度室與井下駕駛員之間的調度對講和視頻通話、井下交通信號燈邏輯控制、車輛運行信息上傳等功能[6]。國家能源集團神東煤炭大柳塔煤礦無軌膠輪車安裝了預防撞系統和防疲勞駕駛預警系統,提高了車輛運行的安全性[7]。國家能源集團神東煤炭布爾臺煤礦開展了5G網絡環境下新能源運人車的無人駕駛測試[8]。山西晉能控股煤業集團塔山煤礦挖金灣區副平硐安設了無軌膠輪車失速保護系統,當無軌膠輪車發生速度失控時,車載掛鉤鉤住巷道設備的阻攔索,給車輛提供一個可靠且平穩的拉力,使車輛減速,避免持續向下跑車,主動制動效果良好[9]。
從上述應用情況可以看出,井工煤礦輔助運輸智能化目前還處于裝備的單機智能化發展階段,尚未形成集車輛調度、運行狀態監測、交通指揮、物資管控等功能于一體的輔助運輸智能化系統。
2 井工煤礦輔助運輸智能化存在的問題
井工煤礦輔助運輸系統智能化建設剛剛起步,受礦井基礎條件建設不足、裝備運行環境復雜、地面一些高新技術在井下環境應用的難度相對較高等因素制約,輔助運輸智能化建設進展較慢。
當前多數井工煤礦基于智能化發展的礦井基礎設施和高速網絡環境建設不足,已建成的定位系統對于車輛的定位精度和實時性尚不能滿足輔運裝備運行速度要求,制約了輔助運輸系統相關智能化功能的發揮和實現。礦井物料管理僅在倉儲環節有所進展,運行和使用中的物料缺乏有效監管,物料消耗量大。現有的車輛調度系統僅具有一些狀態信息的展示和發布、靜態視頻監控和固定邏輯的紅綠燈控制等常規功能,車輛運行缺乏統一的調配和利用,綜合運輸效率低,燃油成本陡增,浪費嚴重。對于多種運輸方式并存的礦井,急需實現物料的自動裝卸和自動接駁。輔助作業場景急需實現輔助作業功能的自動化和智能化,降低作業人員數量,降低工人勞動強度。單機智能化方面,受鋰電池技術發展和安全因素影響,新能源車輛續駛里程有待突破,運行模式有待驗證,確保車輛運行安全的駕駛輔助系統亟待完善。
(1) 定位系統定位精度低和實時性差。礦井巷道內無衛星信號,不僅巷道長廊效應凸顯,目標活動范圍較為分散,且井下環境信號屏蔽物較多、電磁環境復雜多變,要實現人員、車輛等動目標的精確定位,需要采用室內定位技術。現有定位技術的優缺點對比見表1。可看出超寬帶(Ultra Wide Band,UWB)定位技術與其他無線定位技術相比,具有定位精度高、覆蓋距離遠、成本適中、功耗低、安全風險低等優點,可以克服復雜巷道空間內的障礙物阻擋,無論是精度還是穩定性都非常適合在煤礦井下復雜環境中實現目標的精確實時定位,能夠滿足《煤礦井下人員定位系統安全技術要求(試行)》對目標定位的精度要求。
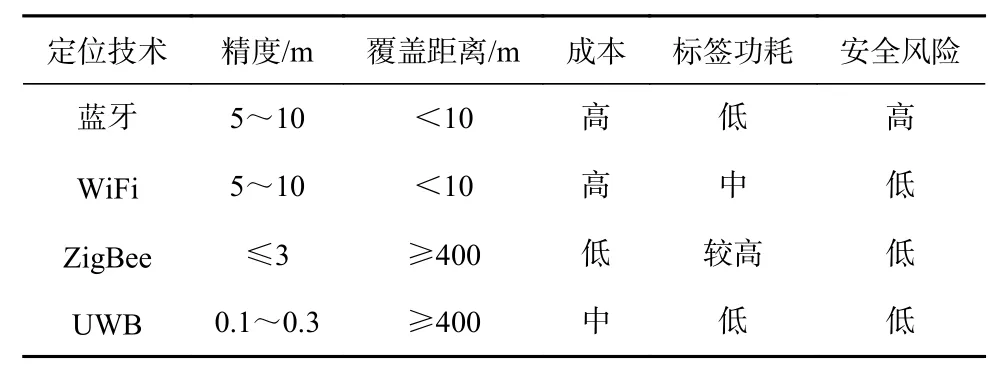
表1 定位技術的優缺點對比Table 1 Comparison of advantages and disadvantages of positioning technologies
目前煤礦井下在用的定位系統多以UWB或UWB(定位)+ZigBee(通信)融合組網2種形式為主。其中融合組網將定位網絡和數據傳輸網絡分離,采用雙通信技術下發模式,優先ZigBee下發,若ZigBee下發失敗,轉UWB鏈路下發,為井下撤離、呼叫增設雙保險,在意外發生時后臺還能夠與被困者進行通信。通過ZigBee下發信息和上傳求救信號,豐富和擴展了UWB定位系統功能應用,可以滿足井下定位系統建設中雙向通信要求。現有的UWB定位技術可實現人員或設備靜態定位精度為3 cm,動態定位精度為100 cm。該定位精度用于運動中的輔助運輸裝備勉強夠用,但若用于井下車輛的自動駕駛和無人駕駛系統,定位的準確性和實時性還難以滿足使用要求[10-11]。
(2) 車輛智能調度系統功能缺乏融合。現有的車輛智能調度系統采用WiFi無線通信、UWB精確定位、機車車輛信號安全調度、視頻監控等技術,在井下主要運輸巷道設置通信基站、信號機、讀卡分站等設備,配合地面監控中心服務器及軟件,實現軌道機車或無軌膠輪車的智能調度和管理[12-13]。其中軌道機車智能調度系統實現了電機車、礦車的精確定位、信號機道岔自動控制、電機車安全識別、自動閉鎖、工況信息自動上傳等功能。無軌膠輪車車輛智能調度系統實現了車輛定位、狀態監測、車輛指揮調度、交通管控、違章報警、調度對講、視頻通話、信息發布、信息展示、報表管理、行車軌跡回放、無線通信、數據上傳等功能。
車輛智能調度系統的發展一定是要全方位實現輔助運輸各環節的智能化調度和管理才有意義。現有的車輛智能調度系統功能還僅限于狀態監測、單一的信息展示和查看、固定邏輯的交通信號燈控制等。尚沒有與礦井實際情況有機融合,沒有與物資的裝運、交接、卸載、回收等環節有深度交集和銜接,僅僅做到了井下輔運信息的收集和匯總,缺乏對數據的分析和再處理,難以真正支撐系統去做決策,有待進一步深入研究。
(3) 駕駛輔助系統模塊不健全。駕駛輔助系統是利用安裝于車上的各種傳感器(攝像頭、毫米波雷達、激光雷達和超聲波雷達等)在第一時間收集車內外環境數據,對車輛周圍靜動態物體進行辨識、偵測與追蹤處理,及時判斷車輛當前所處狀態,提示駕駛員采取下一步操作,全面提高車輛行駛安全性[14]。
駕駛輔助系統涵蓋的范圍較廣,對于煤礦輔助運輸車輛來講主要有防疲勞駕駛預警系統、360°全景環視監控系統、預防撞系統、交通標志識別系統、下坡行車輔助制動系統、自適應照明系統等。其中防疲勞駕駛預警和預防撞系統已經實現了產業化應用。多種下坡行車輔助制動系統已經基本滿足當前礦井長距離下坡制動需求。360°全景環視監控、交通標志識別和自適應照明等系統還在研發中。
(4) 無人駕駛技術與元部件發展滯后。地下金屬礦山無人駕駛技術早于煤礦,山東黃金萊西金礦和甘肅金川集團金屬礦已經實現了軌道機車的無人駕駛運行。2020-2021年,一些科研單位在國內煤礦進行了最新的井下無人駕駛車輛性能展示。采用的技術路線多是在原來的防爆鋰離子蓄電池無軌膠輪車上加裝定位單元、環境感知單元、整車控制單元,根據收集到的環境信息對目標車輛的油門、轉向、制動等系統進行相應控制,在井下路況較好的巷道內進行了無人駕駛運行試驗[15-17]。
盡管各裝備制造商已經聯合國內地面無人駕駛科技企業進行了井下車輛無人駕駛嘗試,激光雷達、毫米波雷達、高清攝像頭、深度相機等感知型傳感器也有了隔爆型或本安型產品。但當前僅實現了巷道中的居中自主行駛,還未能實現井下巷道彎道自動識別和自動轉彎、錯車、自主導航等操作。未來無人駕駛在煤礦井下的真正落地還要依賴于低時延高速網絡、高精度定位、高精度地圖等系統的成熟應用。
3 煤礦輔助運輸系統智能化框架設計
根據2021年6月5日國家能源局、國家礦山安全監察局發布的《煤礦智能化建設指南(2021年版)》中的建設要求[18],總結提出了輔助運輸系統智能化建設總體目標:建設具有智能規劃、任務分配功能的輔助車輛智能調度管理系統,逐步實現物資運輸、人員運輸等輔助運輸車輛的智能管控、智能路徑規劃與智能調度,積極開展井下輔助作業的機器人替代,完善運輸車輛駕駛輔助系統功能,分區域適時應用和推廣無人駕駛,全面提升礦井輔助運輸的智能化水平。
根據輔助運輸系統智能化建設總體目標,本文設計了輔助運輸系統智能化總體框架,主要包括物資運輸管控系統、車輛智能調度系統和單機智能化系統,如圖1所示。核心內容包括物資編碼和物資集裝化運輸、自動裝卸和自動接駁、精準定位和智能導航、智能調度、駕駛輔助系統、輔助作業機器人、無人駕駛等[19-20]。
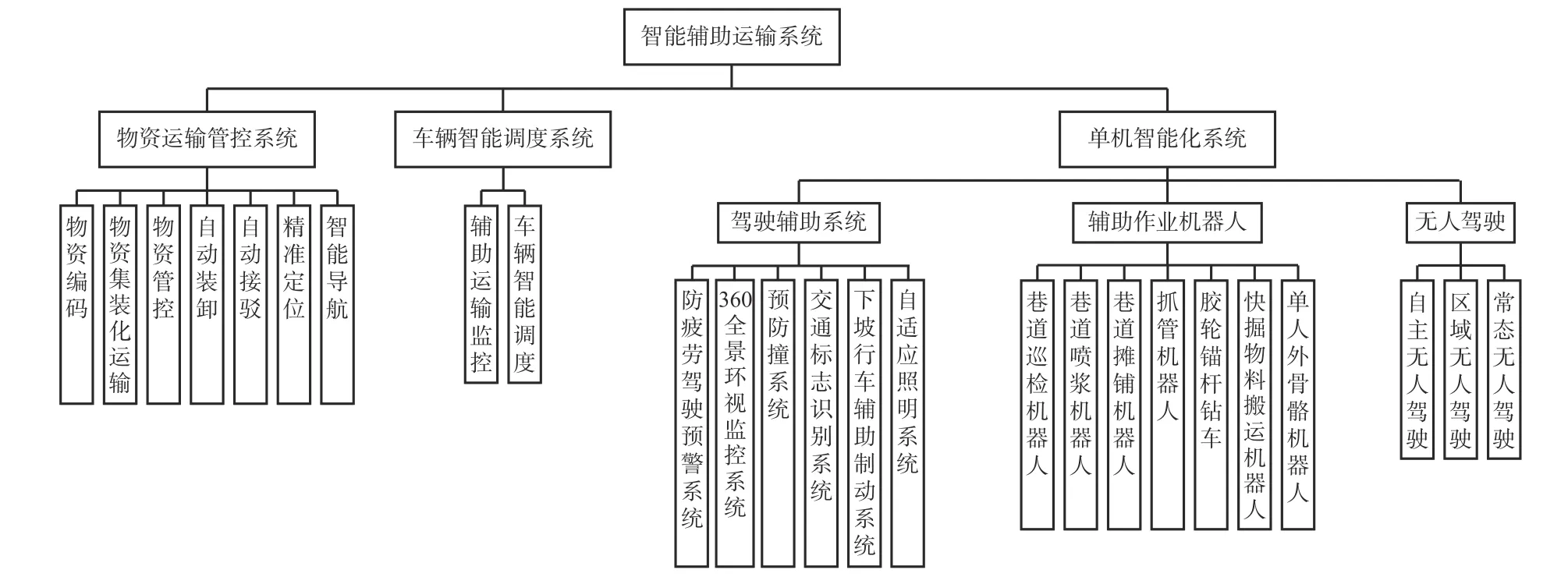
圖1 輔助運輸系統智能化總體架構Fig. 1 Overall architecture of intelligent auxiliary transportation system
3.1 物資編碼和物資集裝化運輸
(1) 智能物資配送系統建設。完成智能物流、物聯網平臺的建設,實現物資線上申請、審批、物資與車輛電子綁定、自動跟蹤、電子交接等功能,最終實現所有物資從井上倉儲到井下施工現場的信息化管控,同時將各環節管控信息并入安全信息系統和結算系統。智能物資配送系統如圖2所示。
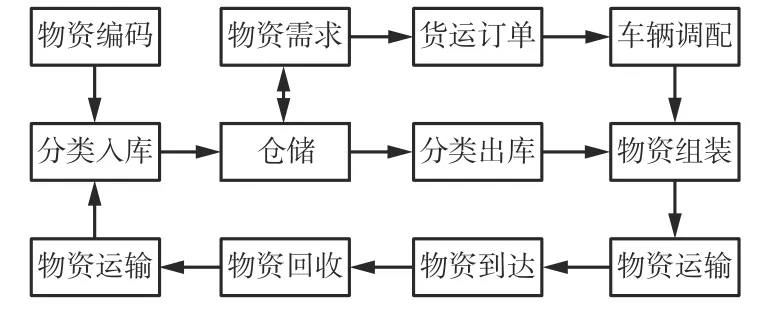
圖2 智能物資配送系統Fig. 2 Intelligent material distribution system
智能物資配送流程:在倉儲環節,將入庫的礦用物資進行編碼,錄入型號、規格、數量、供應商等必要信息。各生產隊提出物資需求(包含名稱、代碼、數量、需求時間、需求地點等信息);輔運隊根據物資需求信息,綜合考慮運送地點,制定單車次貨運訂單,并調配對應車輛前往物資準備區;物資準備區根據貨運訂單與倉儲對接,進行物資的標準化組裝;輔運隊將配送物資運輸至指定地點;生產隊負責物資的接收和卸貨,同時負責多余物資的裝車;輔運隊將多余物資運輸至地面倉儲,倉儲辦理多余物資入庫和廢舊物資處理,自此交接完成一個物資配送流程。該流程可實現物資從倉儲、編碼、裝車、運輸、卸車到回收過程的全流程信息化管控。
智能物資配送系統優點:① 可實時查看和掌握物資物流狀態信息。② 實行單車次貨運訂單,可實現車輛的高效利用,提高車輛周轉率,減少浪費。③ 便于物資消耗報表統計。④ 各環節分工明確,可實現物資的智能高效配送。
(2) 物資集裝化運輸實現。掘進工作面錨桿、錨索、錨固劑、托盤、鋼帶、護網等錨護材料種類繁多、外形尺寸和包裝差異性大,由于井下掘進工作面物料運輸空間受限,現有的搬運方式(錨護材料一般由工人分批次人工搬運放置到物資區再行碼放)勞動強度大、工作效率低。尤其是采用快速掘進工藝后,這樣的備料方式與掘進進尺不匹配的問題更加凸顯。實現復雜物資的集裝化運輸是解決上述問題的有效途徑[21]。按照物資的外形尺寸和用量需求,定制設計專用物資集裝箱,集裝箱內設置隔板將物資分開放置且不積壓。在地面物資準備區將物資按格放好,輔運隊將集裝箱整體運輸至作業地點后,整體卸下集裝箱,省去了工人搬運物資和二次碼放環節,待物資用完后將空的集裝箱整體運回地面。集裝箱運輸車具有自動快速更換集裝箱的功能。
3.2 自動裝卸和自動接駁
無軌膠輪車輔助運輸不需要進行物資的二次換裝,即可實現人員及物資的“點對點”無中轉連續運輸,該優點也使其成為了高產高效礦井輔助運輸的必選項。但在我國山東、安徽及云貴川地區的很多中小型煤礦,輔助運輸方式采用的仍是以軌道機車運輸為主,單軌吊、架空乘人裝置及無軌膠輪車為輔,多種方式并存的運輸方式,人員上下班路上耗時較多,物資中轉費時費力,輔助運輸效率低,導致產能受限,亟待實現物資的自動裝卸和自動接駁。
煤礦輔助運輸需要實現物資自動裝卸和自動接駁的場景主要如下:① 依托精準定位及特征識別技術,研究整體式物資集裝箱的自動裝卸和自動轉運技術,實現物資從地軌到無軌、地軌到單軌吊、單軌吊到無軌、無軌到地軌、無軌到單軌吊等多種形式的自動物資轉運和接駁,有效提高運輸效率,降低輔運安全事故發生概率。② 實現地軌和單軌吊的自動道岔變換功能,取消人工干預。③ 實現移動類運輸裝備的快速自動充換電池功能。
3.3 精準定位和智能導航
(1) 輔助運輸精準定位系統。精準定位技術是輔助運輸裝備實現智能化的關鍵技術。依托于F5G工業互聯網、井下地理信息系統、WiFi無線通信技術、UWB精確定位技術或新型組合定位技術,實現井下運輸機車及車輛類動目標的實時精準定位。
(2) 導航系統。利用已知的井下巷道數字地圖,根據設定的起始點和目的地,按照路線優、節能佳、安全性高的原則,采用適宜的全局路徑規劃算法,快速合理地規劃出線路。在操作終端上顯示地圖及車輛當前位置、行車速度、到目的地的距離、規劃路線提示、路口轉向提示的行車信息等。行進中可用語音提前向駕駛者提供路口轉向、導航系統狀況等行車信息。
3.4 智能調度
(1) 輔助運輸監控系統。實現電機車、單軌吊機車的精確定位、信號機道岔自動控制、電機車安全識別、自動閉鎖、工況信息自動上傳等功能。實現無軌膠輪車的精準定位、狀態監測、違章報警、調度對講、視頻通話、信息上傳等功能。實現車輛的可視化監測,在地面調度室以漢字、模擬圖和表格等形式實時顯示各車輛位置、區段占用、視頻圖像等信息。
(2) 車輛智能調度系統。根據井下所有機車及車輛運行信息及作業需求,快速自動規劃各車輛運行路線,并自動調度各車輛出發時間、會車地點,提高運輸效率。在生產物資的裝運、交接、卸載、回收等環節均實現物聯網電子化管理,系統可實時掌握物資運輸過程的動態變化。通過計算機在網上進行物資申請、審批,通過網絡實時下發、安排出庫和裝車、運輸等指令;根據各區段的車輛位置,通過計算機的聯鎖運算,實現自動扳動道岔、轉換紅綠燈信號來指揮車輛運行,有效提升礦井物流轉運效率,提高礦井生產運輸管理自動化和信息化水平。
3.5 駕駛輔助系統
井下車輛駕駛輔助系統主要包括防疲勞駕駛預警系統、360°全景環視監控系統、預防撞系統、交通標志識別系統、下坡行車輔助制動系統、自適應照明系統。
(1) 防疲勞駕駛預警系統。實現駕駛員不刷臉認證、開車瞌睡、打哈欠、開車抽煙、開車打電話、開車注意力不集中、離崗/攝像頭遮擋等不良駕駛行為檢測功能,并發出預警。
(2) 360°全景環視監控系統。在車輛周圍安裝能覆蓋車輛周邊所有視場范圍的 4~8個廣角攝像頭,對同一時刻采集到的多路視頻影像進行拼接融合,處理成一張車輛周邊360°的車身俯視圖并在中控臺顯示,使司機能夠直觀地看到車輛四周情況,有效減少駕駛過程中刮蹭、碰撞等事故的發生。
(3) 預防撞系統。預防撞系統能自動探測車輛前方障礙物,測算出發生碰撞的可能性。若系統判斷碰撞的可能性很大,則發出警報聲。若系統判斷碰撞不可避免,則預先收緊前座安全帶、啟動剎車來最大限度地減輕損傷。
(4) 交通標志識別系統。使用前攝像頭結合模式識別軟件,可以識別常見的交通標志(紅綠燈、限速、停車、掉頭等)。借助于靈活的軟件平臺增強探測算法,準確識別不同地點的交通標志,提醒駕駛員注意巷道前方懸掛的交通標志,降低駕駛員不遵守交規的可能性,提高車輛運行的安全性。
(5) 下坡行車輔助制動系統。為了避免制動系統負荷過大,減輕駕駛員負擔,在不踩加速踏板和制動踏板的條件下,通過加裝緩速器或采用其他類型速度控制系統,自動將車速控制在適當水平。系統工作時,車輛以恒定低速行駛,確保行駛的穩定性與提高駕乘的舒適性。
(6) 自適應照明系統。根據定位和導航信息綜合評判,系統在車輛會車、轉彎和經過紅綠燈時,自動調整算法,控制相應燈光顯示,自動調節燈光遠近、亮度和角度。
3.6 輔助作業機器人
開展井下輔助作業的機器人替代。煤礦井下輔助作業主要包括巷道巡檢作業、管路安裝作業、巷道攤鋪作業、錨桿補強作業、底板修復作業、巷道清洗作業、混凝土泵送作業、電纜收放作業、開槽作業、噴漿作業等,裝備自動化程度較低,輔助作業時占用人員多。在上述作業中使用輔助作業機器人替代后,預計減人目標見表2。
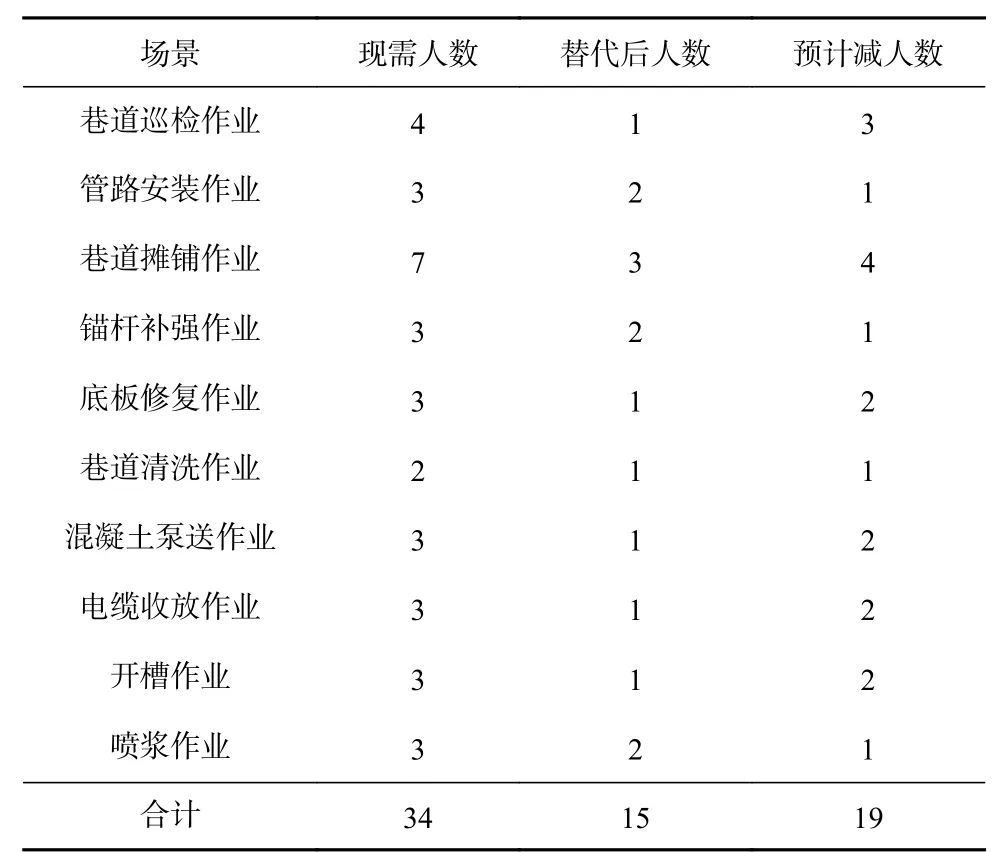
表2 輔助作業減人目標Table 2 Auxiliary operation personnel reduction targets
從表2可看出,井下輔助作業場景使用機器人后綜合減員達55.9%,不僅可大大提高輔助作業的自動化和智能化水平,降低工人勞動強度,而且能夠有效減少下井作業人員數量,降低作業風險。
3.7 無人駕駛
(1) 軌道機車和單軌吊無人駕駛實現。建設地面及井下輔運集控中心,采用高精度定位技術、高精地圖構建技術、高清視頻監控技術、低時延網絡傳輸技術,在數字孿生的虛擬環境系統的輔助下,實現軌道機車和單軌吊機車的遠程控制駕駛。采用環境感知、定位導航、路徑規劃、總線控制、智能防撞、駕駛輔助等技術,實現車輛自動啟停、自主道岔變換、自動跟車等功能,實現軌道機車和單軌吊機車的智能化無人自動駕駛。
(2) 無軌膠輪車無人駕駛實現。鼓勵具備條件的礦井探索應用無軌膠輪車無人駕駛技術,分階段實施。① 初級階段:在不依賴精確定位系統的條件下,車輛上簡單配置激光雷達、深度相機、毫米波雷達等傳感器,實現無軌膠輪車在井下固定路段內的自主無人駕駛。② 中級階段:基于礦井高精地圖系統、車輛精確定位系統、智能導航系統和駕駛輔助系統,實現無軌膠輪車在導航環境下的區域無人駕駛,并借助地面集控中心平臺,實現基于數字孿生的地面遠程控制無人駕駛。③ 高級階段:在礦井物聯網環境下,實現與地面倉儲和井下使用場景間的無縫銜接,實現物資的全流程無人配送。無軌膠輪車實現自動裝卸、無人自動運行、自動轉彎、自動避障、自動充換電等功能,最終實現無軌膠輪車常態化無人駕駛。
4 結論
(1) 當前露天煤礦的輔助運輸系統智能化進展較快,已經實現了礦用卡車在礦區固定線路內的自動駕駛、自動避障和車輛調度。井工煤礦的輔助運輸系統受定位系統精度低和實時性差、調度系統功能缺乏有效融合、駕駛輔助系統模塊不健全、智能傳感器和自動駕駛技術滯后等因素制約,智能化發展較為緩慢。井工煤礦輔助運輸智能化目前還處于裝備的單機智能化發展階段,尚未形成集車輛調度、運行狀態監測、交通指揮、物資管控等功能于一體的輔助運輸智能化系統。
(2) 總結提出了輔助運輸系統智能化建設總體目標:建設具有智能規劃、任務分配功能的輔助車輛智能調度管理系統,逐步實現物資運輸、人員運輸等輔助運輸車輛的智能管控、智能路徑規劃與智能調度,積極開展井下輔助作業的機器人替代,完善運輸車輛駕駛輔助系統功能,分區域適時應用和推廣無人駕駛,全面提升礦井輔助運輸的智能化水平。
(3) 根據輔助運輸系統智能化建設總體目標設計了煤礦輔助運輸系統智能化框架:物資編碼和物資集裝化運輸,實現物資從倉儲、編碼、裝車、運輸、卸車到回收過程的全流程信息化管控;自動裝卸和自動接駁,實現物資在軌道機車、單軌吊、無軌等不同輔助運輸方式之間的自動轉運和接駁;精準定位和智能導航,實現人員及運輸設備的精準實時定位、路線規劃和實時導航;車輛智能調度,實現輔助運輸綜合信息展示、數據傳輸、狀態監測、調度指揮和健康管理等功能;駕駛輔助系統,建設防疲勞駕駛預警、360°全景環視監控、預防撞、交通標志識別、下坡行車輔助制動、自適應照明等智能化子系統,提高機車運行的安全性;輔助作業機器人替代,實現井下輔助作業場景的機器人自動化作業,減少用工數量,提高輔助作業整體自動化水平;無人駕駛,實現機車在礦井下的無人駕駛常態化運行。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(2020年4期)2020-10-27 02:45:52
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國交通信息化(2017年4期)2017-06-06 07:21:52
工業設計(2016年4期)2016-05-04 04:00:23
能源(2015年8期)2015-05-26 09:15:56
現代企業(2015年8期)2015-02-28 18:55:34