基于UWB精確定位的輔助運輸交通燈自動控制系統
2022-07-07 17:13:58包翔宇單成偉吳巖明
工礦自動化 2022年6期
關鍵詞:信息
包翔宇, 單成偉, 吳巖明
(1. 天地(常州)自動化股份有限公司,江蘇 常州 213015;2. 中煤科工集團常州研究院有限公司,江蘇 常州 213015)
0 引言
煤礦輔助運輸系統是煤礦產業系統化作業的重要組成部分。為了實現井下車輛、人員、物料一體化管控、監督與調度,輔助運輸系統不斷向新工藝、新技術靠攏,朝著實現自動化、智能化、信息化的目標持續發展[1-3]。將輔助運輸系統構建成為智能輔助運輸一體化管控體系是智能礦山建設的核心范疇,實現礦井車輛網絡化調度管理又是構建智能輔助運輸一體化管控體系的關鍵[4]。為了實現礦井車輛網絡化調度管理,首要任務是在井下運輸作業過程中充分保證交通運輸的安全性。在井下運輸作業過程中,采用上位機系統對井下運輸進行遠程控制,會造成車輛在路口盲區候車無序、錯車困難,且易發生碰撞事故,導致運輸效率低、運輸安全得不到可靠的保障[5]。而保證安全運輸的最佳手段就是設置井下交通燈就地控制系統,對復雜路段、視野盲區等區域進行交通區域管控[6]。
許多學者對井下交通燈控制系統的實現方式進行了研究。吳畏等[7]采用無線信號飛行時間定位對井下車輛進行實時定位,通過定位位置信息控制交通燈,但該系統功能較為單一,缺少完整的車輛放行機制。郭海軍等[8]采用射頻識別(Radio Frequency Identification,RFID)技術實現井下車輛定位跟蹤,通過定位位置信息控制區間路段交通燈。該系統著重解決了狹窄巷道區間內車輛調度問題,但缺少路口控制邏輯,無法滿足井下大流量的多岔路口的管控需求。佘九華等[9]提出采用位置傳感器判斷車輛位置,實現交通燈控制。但受井下其他物體、人員的干擾,傳感器易誤觸發控制指令,且傳感器設備安裝條件較為苛刻,設備損耗度高、維護困難。且采用傳感器定位的交通燈控制系統與車輛精確定位系統的結合度不高,無法實時監控每臺車輛的行駛數據和駕駛行為[10-12]。
針對上述問題,本文設計了一種基于超寬帶(Ultra Wide Band,UWB)精確定位的輔助運輸交通燈自動控制系統。該系統通過邏輯控制器實時讀取定位基站存儲的車輛數據,解析成管控信息,控制交通燈執行控制指令,指揮運輸車輛有序通行。邏輯控制器與上位機通過環網連接,上位機可下發控制指令遠程變燈,邏輯控制器實時地將井下車輛的行駛數據、異常駕駛行為、交通燈狀態等多種信息上傳至上位機礦井車輛調度系統,真正實現就地控制與遠程輔控相結合。
1 定位基站的技術特征
定位基站采取UWB超寬帶定位技術與車輛定位卡進行數據交互,實時讀取2根定位天線關于車輛定位卡的距離信息。定位基站的靜態定位誤差小于0.3 m,數據接收范圍達400 m。在封閉的巷道中,定位基站安裝正負2根全向定位天線(圖1),其中紅色代表正天線,安裝在巷道下行方向,藍色代表負天線,安裝在巷道上行方向。
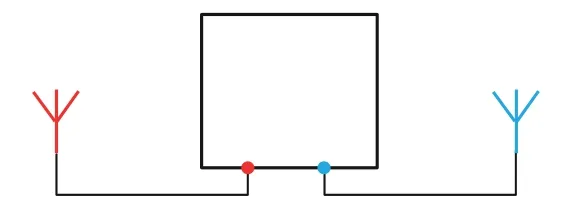
圖1 定位基站Fig. 1 Positioning base station
定位基站通過用戶數據報協議(User Datagram Protocol,UDP)將車輛定位卡的距離信息封包存儲,等待邏輯控制器主動請求定位基站傳輸數據報文。每一幀數據報文都包含若干條車輛數據[13]。每一條車輛數據均包含當前車輛卡號、車輛定位卡到一條定位天線的距離值和該定位天線的屬性。
2 控制系統設計
交通燈自動控制系統由定位基站、車輛定位卡、邏輯控制器、交通燈和上位機組成。定位基站獲取車輛定位卡的定位數據,邏輯控制器讀取定位基站獲取到的車輛定位數據。在上位機上配置路口信息,并下發給邏輯控制器。邏輯控制器會根據路口信息和車輛定位卡的定位數據求解出當前路口內車輛定位卡的控制參數。邏輯控制器會根據各個車輛定位卡的控制參數執行放行控制或區域管控策略,改變交通燈的信號狀態并放行車輛。交通燈的信號狀態和車輛定位卡的位置信息會在上位機的圖形界面中實時顯示。
依據定位基站的技術特征,設計了交通燈自動控制系統的控制參數,確定了定位基站在一些典型路口處的分布要求,規定了岔口排序的原則和岔口優先級。
2.1 控制參數
車輛控制參數有位置信息與行駛狀態2種,二者與車輛卡號綁定并實時更新。
首先,依據定位基站的安裝位置劃分路口正負區域(圖2)。以路口中心為基準線,定位基站所在岔口是負區域,對向岔口是正區域。車輛在負區域時,車輛的位置信息為負;車輛在正區域時,車輛的位置信息為正。在路口中心處,車輛的位置信息為零。車輛由負區域駛向正區域時,位置信息不斷增大;車輛由正區域駛向負區域時,位置信息不斷減小。
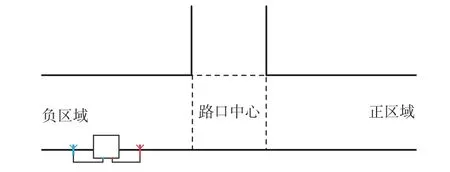
圖2 路口正負區域Fig. 2 Intersection positive and negative area
2.1.1 位置信息
定位天線與車輛定位卡的距離值為一對特征值。比較定位天線與車輛定位卡距離值的大小,可實時判斷車輛定位卡關于定位基站的方位,并求解出車輛與路口的位置關系St。
由于定位基站的天線排布存在一定自由度,正負天線相對路口的安裝位置有所變化,因此,正負天線和路口的遠近關系會隨天線距車輛定位卡的距離改變。將距離當前路口較近的天線設為近天線,距離當前路口較遠的天線設為遠天線。路口位置信息如圖3所示,其中距離路口較近的天線與車輛定位卡的距離數據為近天線距離Sc,距離路口較遠的天線與車輛定位卡的距離數據為遠天線距離Sr。2根天線相距5 m安裝,Scr為兩天線距離的一半,即2.5 m。定位基站中心到路口的距離用S0表示。
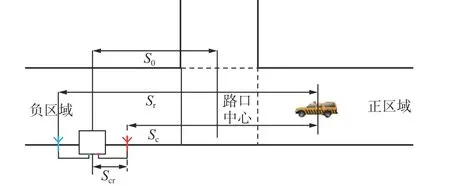
圖3 路口位置信息Fig. 3 Intersection location information
車輛到路口的位置信息分3種情況,如圖4所示。
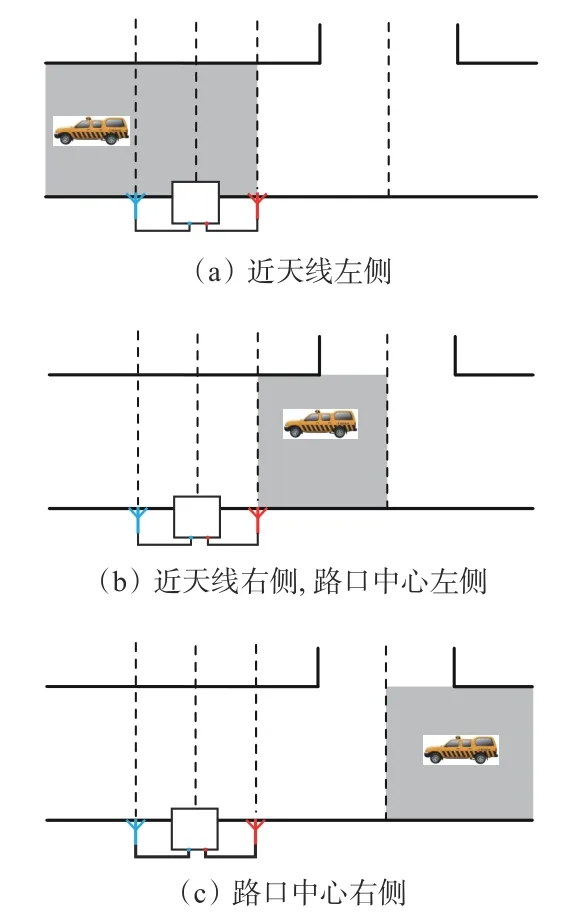
圖4 車輛的3種位置區域Fig. 4 Three location areas of vehicles
(1) 當車輛在定位基站近天線左側位置區域中,車輛所處的位置存在2種情況:① 近天線到車輛的距離較遠,即Sc>Sr;② 近天線到車輛的距離較近且遠天線到車輛的距離小于2根天線之間的距離,即Sc<Sr且Sr<2Scr。此時車輛到路口的距離等于近天線到路口的距離加上近天線到車輛的距離。位置關系為

(2) 當車輛在定位基站近天線右側、路口中心左側位置區域中,近天線距離車輛較近且近天線到車輛的距離小于近天線到路口的距離,即Sc<Sr且S0-Scr>Sc。此時車輛到路口的距離等于近天線到路口的距離減去近天線到車輛的距離。車輛此時在負區域內。位置關系為

(3) 當車輛在路口中心右側位置區域中,近天線距離車輛較近,且近天線到車輛的距離大于近天線到路口的距離,即Sc<Sr且S0-Scr<Sc。此時車輛到路口的距離等于近天線到車輛的距離減去近天線到路口的距離。車輛此時在正區域內。位置關系為

2.1.2 行駛狀態
車輛的行駛狀態用數值表征:“9”表示初始狀態,“0”表示停止狀態,“1”表示正向行駛狀態,“2”表示負向行駛狀態。正負向行駛狀態如圖5所示。
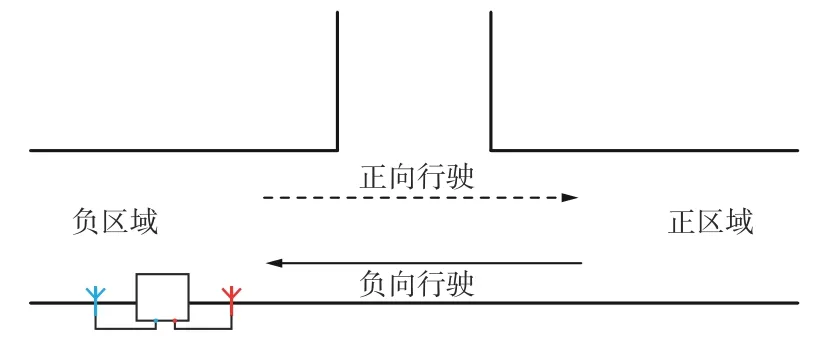
圖5 正負向行駛狀態Fig. 5 Positive and negative driving state
邏輯控制器通過比較當前位置信息與上一時刻位置信息,判定車輛當前的行駛狀態。具體判定流程如圖6所示。
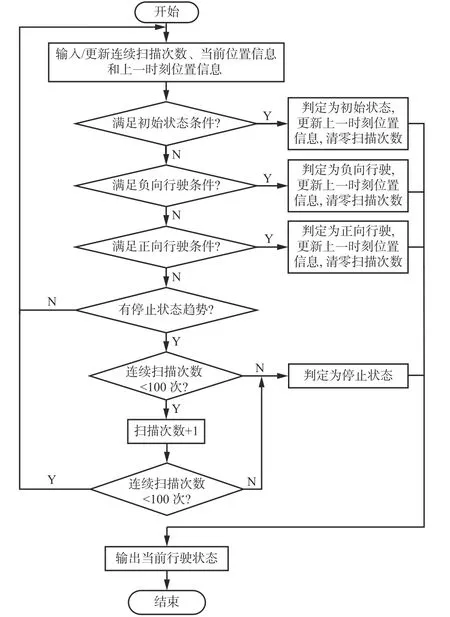
圖6 行駛狀態判定流程Fig. 6 Determination process of driving state
每個任務周期內,邏輯控制器采集每輛車當前的行駛狀態屬性,包括車輛當前位置信息、上一時刻位置信息和連續掃描次數(表征車輛被連續判定為有進入停止狀態趨勢的次數)。若滿足任一種條件(① 上一時刻位置信息為0;② 上一時刻位置信息在正區域,當前位置信息在負區域;③ 上一時刻位置信息在負區域,當前位置信息在正區域),則判定車輛進入初始狀態,更新上一時刻的位置信息,并清零掃描次數。若當前位置信息減去上一時刻位置信息的差值≤-3 m,則判定車輛為負向行駛狀態,更新上一時刻的位置信息,并清零掃描次數。若當前位置信息減去上一時刻位置信息的差值≥3 m,則判定車輛為正向行駛狀態,更新上一時刻的位置信息,并清零掃描次數。
若不滿足初始狀態、負向行駛狀態和正向行駛狀態中的一種,則判斷是否有進入停止狀態的趨勢。若當前位置信息與上一時刻位置信息的差值絕對值<3 m,表明車輛當前有進入停止狀態的趨勢。若當前連續掃描次數<100次,則將連續掃描次數加1,并跳轉至下一循環。若當前連續掃描次數=100次,則判定車輛進入停止狀態。此時會獲取最新的行駛狀態屬性,并再次執行條件判斷,直至輸出當前行駛狀態,結束當前任務周期。
2.2 定位基站的分布要求
使用定位基站獲取路口區域內的定位卡信息時,需要考慮全向定位天線接收信號的無向性。定位天線接收定位卡信息的無向性使得每一根定位天線都能獲取路口各個方向的定位卡信息。以三岔路口為例(圖7)對定位基站的分布要求進行分析。在圖7(a)中,路口只安裝了1號定位基站。1號定位基站能同時掃描到白色和灰色2個區域的數據,灰色區域處數據滿足正天線距離<負天線距離。以灰色區域的2個標記點×為例,2處接收的定位天線的數據完全相同,導致1號定位基站無法判定車輛定位卡處于②號岔口還是③號岔口。
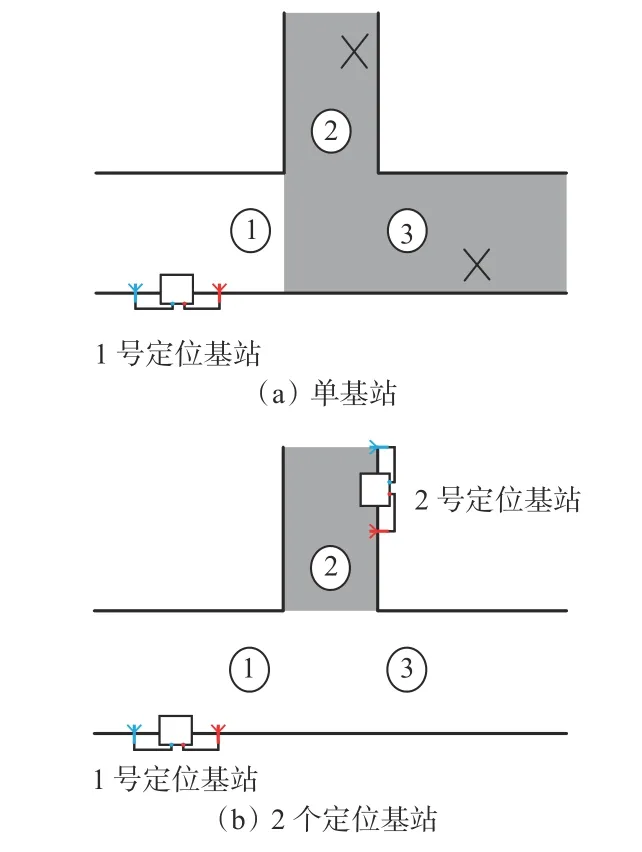
圖7 掃描三岔路口Fig. 7 Scan three intersections
為了區分車輛定位卡在②號岔口還是③號岔口,需在②號岔口增加2號定位基站(圖7(b))。2號定位基站所在的②號岔口為該定位基站在路口內唯一的負區域。此時路口被有效劃分為4個獨立的區域:①號岔口對應1號定位基站在該路口唯一的負區域;②號岔口對應2號定位基站在該路口唯一的負區域;③號岔口對應1號定位基站在該路口唯一的正區域;路口中心對應1號定位基站在該路口唯一的零區域。這樣每個路口區域才能完全區分開,邏輯控制器才能執行正確的控制邏輯。
以此類推,基站數量至少應該是岔口數量減1,單路口最多只有1個基站能同時掃描2個岔口,而其他岔口必須由不同的定位基站單獨掃描。將同時掃描一條直線上一組對向岔口的定位基站稱為共用定位基站。共用定位基站安裝地點所在的岔口是該共用定位基站的負區域,對向岔口是該共用定位基站的正區域。其他岔口內的定位基站只掃描自身的負區域。如果基站數量和岔口數量相當,那么所有定位基站都只掃描自身的負區域。依據該結論,歸納出井下5種典型路口的定位基站配置,如圖8所示。
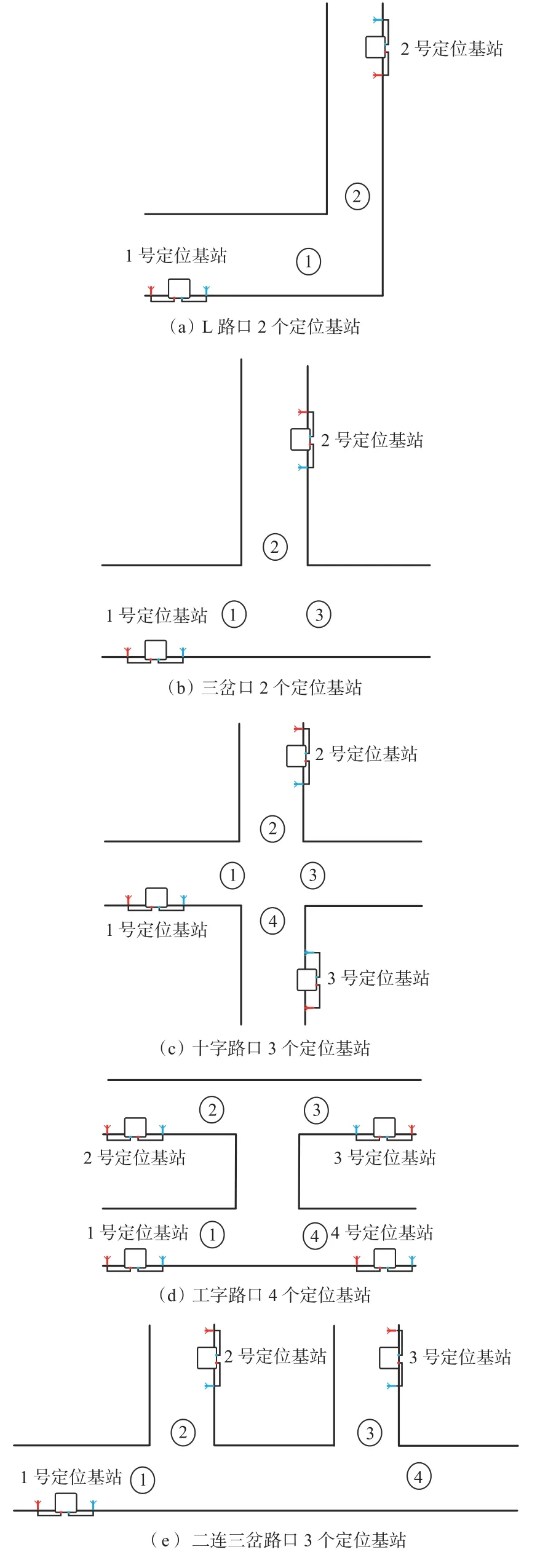
圖8 典型路口定位基站配置Fig. 8 Positioning base station configurations of typical regular intersections
2.3 區域控制門限
各個具體路口對控制區域的大小有不同的要求,對車輛出入路口時交通燈放行和解除放行的門限距離要求也各不相同,因此需要設置具體的區域控制門限,實現交通燈自動控制系統對區域控制門限的靈活配置。交通燈自動控制系統設置了入列門限、閉鎖門限和解鎖門限3個控制門限。當車輛進入路口,距離路口<入列門限,則認為該車輛已經由當前岔口駛向路口。當車輛繼續行駛,距離路口<閉鎖門限,則認為該車輛已經向路口中心靠近,此時需要控制交通燈發出指令,放行當前岔口車輛。當車輛駛出路口,超出解鎖門限,車輛觸發解鎖邏輯,視為該車輛已駛離路口。設置控制門限時,入列門限、閉鎖門限和解鎖門限的值應依次減小。以三岔口為例,控制門限設置如圖9所示。
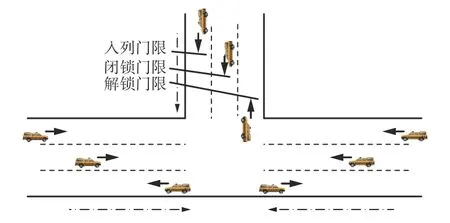
圖9 控制門限Fig. 9 Control threshold
2.4 岔口排序與優先級
在交通燈自動控制系統中,單個邏輯控制器控制單個路口。因為單個路口包含若干個岔口,所以需要對每個岔口進行排序,定義每個岔口在邏輯控制器中的序號,從而控制相應序號的交通燈。岔口的排序規則如圖10所示。若當前路口的定位基站數量等于岔口數量(圖10(a)),則以主巷道下行方向所在的岔口為①號岔口,順時針方向遞增,定義其他岔口的序號。若當前路口的定位基站數量等于岔口數量減1(圖10(b)),存在共用定位基站。則將共用定位基站安裝位置所在的那條岔口作為①號岔口,順時針方向遞增,定義其他岔口的序號。
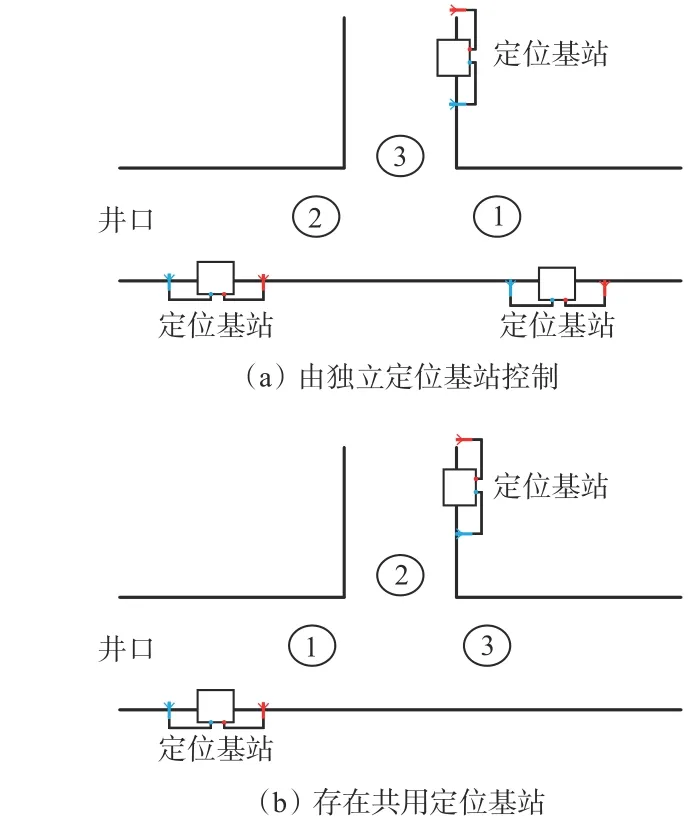
圖10 岔口排序Fig. 10 Sorting of forks
岔口放行規則:每個岔口都設置一個入列車輛列表。如果當前岔口的入列車輛列表為空,代表該岔口內沒有車等待放行。如果當前岔口內有車輛進入時,會依據先后順序將車輛卡號排入對應岔口的入列車輛列表中。任意岔口的入列車輛列表非空時,說明該岔口內車輛需要放行。此時邏輯控制器會對需要放行的有入列車輛的岔口進行排序,得到一個待放行的岔口序號的列表。得到該列表后,會立即放行當前排在第1位的岔口。
為規定岔口的優先放行次序、實現多個岔口同時放行,控制系統引入了岔口優先級。A為最高優先級,用戶需逐級定義各岔口優先級,允許多個岔口優先級相同。其中首優先級表示當前正在放行的優先級,活躍優先級表示當前正在參與優先級排序的優先級,不活躍優先級表示當前優先級循環內已經放行過的優先級,且當前優先級循環內不再參與優先級排序。當岔口存在優先級時,岔口優先級排序規則如下:將活躍優先級進行排序,選有入列車輛的最高優先級作為首優先級執行放行,放行結束后,該優先級轉為不活躍優先級。如果當前活躍優先級數量為零或除了不活躍優先級外的所有優先級均沒有入列車輛,那么當前優先級排序循環結束。此時將所有優先級全部轉為活躍狀態并重新排序,選出新的首優先級執行放行。一個典型的五岔口排序循環如圖11所示,所有優先級由小到大排序,實線框代表活躍優先級,點線框代表首優先級,虛線框代表非活躍優先級。
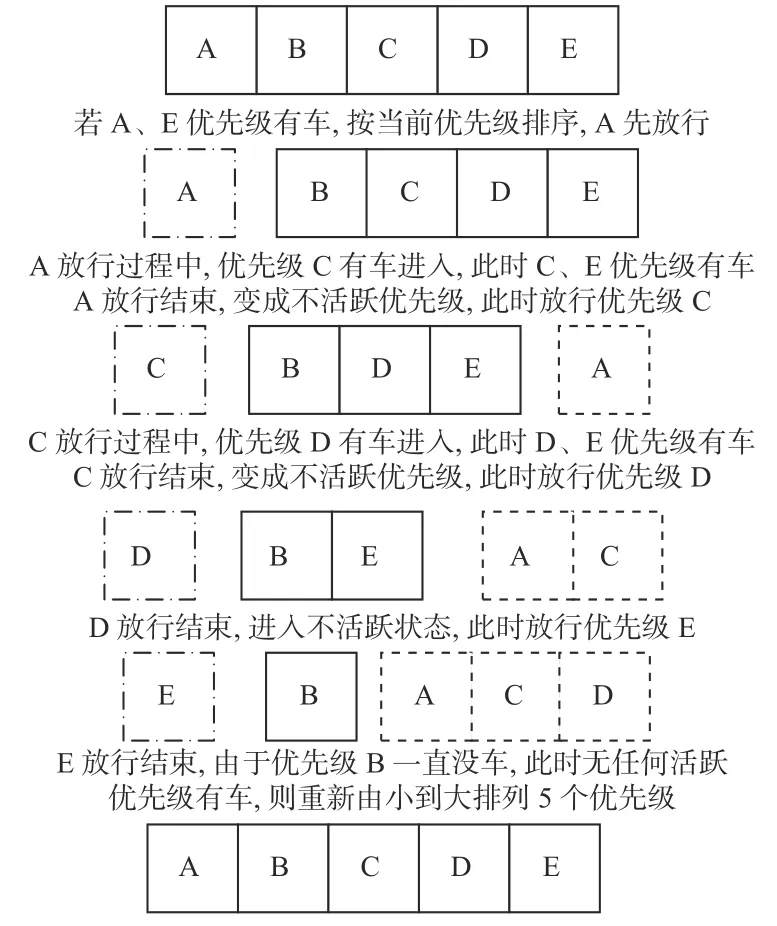
圖11 五岔口優先級排序循環Fig. 11 Five fork prioritization cycle
3 軟件功能與通信模塊
3.1 控制模式
控制系統包括自動控制、手動控制和定時切換3種控制模式,只有當所有配置在路口的定位基站與邏輯控制器的通信正常時才能啟用自動控制,定時切換和手動控制隨時可以啟用。
3.1.1 定時切換
定時切換的輪流放行時間不小于30 s,切換順序由岔口序號/優先級的排序決定,相同優先級的岔口應同時放行。除了當前正在放行的岔口序號/優先級,其他岔口禁行。到達最大放行時間,切換下一個岔口序號/優先級放行。
3.1.2 手動控制
當交通燈自動控制系統處于自動控制或定時切換時,在上位機上直接修改交通燈的指示狀態,交通燈自動控制系統立即進入手動控制狀態。若取消交通燈的手動控制狀態,則交通燈自動控制系統立即恢復自動控制或定時切換。如果手動控制執行的指令是放行路口內某一岔口,則該路口內其他岔口會自動禁行,避免多路口同時放行。
3.1.3 自動控制
系統默認為自動控制模式,規定通行時間不小于30 s。路口控制區間內無車,所有岔口交通燈亮綠燈;路口控制區間內有車,則執行自動控制的放行邏輯判斷。放行邏輯判斷順序為入列判斷、掉線判斷、優先放行、超時放行、出列判斷、闖紅燈判斷、列表更新、狀態發布。
(1) 入列判斷。根據車輛位置信息和行駛狀態,及路口控制門限,判斷當前岔口中入列、閉鎖的車輛,更新入列車輛列表,并對岔口序號/優先級進行排序。
(2) 掉線判斷。對當前正在放行的車輛啟動掉線計時器。如果正在放行的車輛超過15 s無定位卡數據,則判定為掉線。如果重新獲取到車輛定位卡的數據,則解除掉線狀態,掉線計時器重新計時。如果放行車輛掉線超過10 s未恢復,將掉線車輛從入列車輛列表中移除。
(3) 優先放行。一個岔口放行時間超過30 s,開始判定優先放行。當入列車輛達到一定數量,立即優先放行該岔口序號/優先級。同時有多個岔口序號/優先級滿足優先放行條件時,選取入列車輛最多的岔口序號/優先級放行。每個岔口序號/優先級最多可以連續執行2次優先放行。如果下次循環依然是該岔口序號/優先級滿足優先放行條件,則直接跳過優先放行判斷,進入超時放行判斷。
(4) 超時放行。滿足超時放行的條件:① 正在放行的岔口內的所有車輛均為停止狀態,且超過了最大停止時間。② 正在放行的岔口達到了最大放行時間,放行仍未結束且未觸發優先放行。滿足以上任意一個條件,立即結束當前岔口序號/優先級的放行,巡檢下一個需要放行的岔口序號/優先級。如果僅有一個岔口序號/優先級有車,則繼續放行該岔口序號/優先級;如果存在2個及以上的岔口序號/優先級有車,則放行排在次位的岔口序號/優先級。一旦執行超時放行判斷,正在放行的路口的時間歸零并重新計時。
(5) 出列判斷。獲取各岔口序號/優先級的車輛信息,將車輛列表中大于出列門限且正在遠離路口的車輛記為出列狀態。
(6) 闖紅燈判斷。車輛入列岔口為綠燈放行狀態,則記錄車輛在各自入列岔口內最小位置信息。當車輛離開入列岔口,停止更新最小位置信息。車輛入列岔口為紅燈狀態,則更新車輛在入列岔口內的實時位置信息。當車輛離開入列岔口,停止更新實時位置信息。由綠燈切換為紅燈的岔口,若在此入列車輛的最后位置信息已經小于20 m,則視為未闖紅燈,否則以紅燈等待狀態進行判定。所有當前為紅燈等待狀態的車輛,如果車輛距離路口5 m以內或已經進入其他岔口,則認為該車輛已經闖紅燈。闖紅燈列表遵循先入先出原則。上位機讀取闖紅燈信息后,闖紅燈列表立即清空。
(7) 列表更新。首先,更新各個岔口的入列車輛列表,將出列狀態的車輛清除,重新排序其他在列車輛。然后,更新岔口序號/優先級列表,將車輛數為零的岔口序號/優先級清除,重新排序其他岔口序號/優先級。最后,更新當前正在放行的岔口序號/優先級。
(8) 狀態發布。路口信號設備包括交通燈和路口聲光報警器,最大數量均設為3,用于控制規定數量的交通燈和報警器切換狀態。正在放行的岔口序號/優先級亮綠燈,其他亮紅燈。
3.1.4 區間控制
自動控制存在單路口控制和區間控制2種控制邏輯。單路口控制時,當前路口的邏輯控制器與其他路口的邏輯控制器不關聯。若相鄰路口的2個岔口之間配置成關聯岔口,則需要判定是否滿足區間控制邏輯。在區間控制的控制邏輯中,2個關聯岔口之間是一段控制區間。相鄰岔口的控制區間如圖12所示。路口1的岔口③與路口2的岔口①相互關聯,中間陰影部分為控制區間。
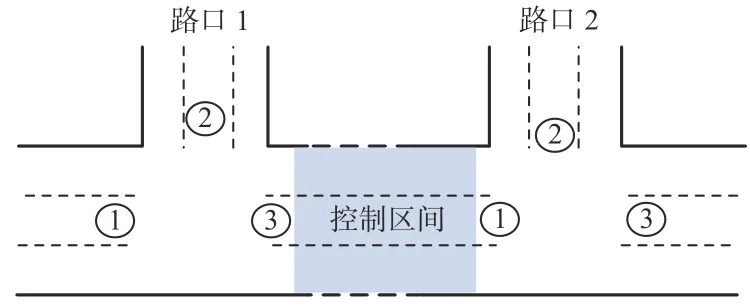
圖12 相鄰岔口的控制區間Fig. 12 Control section of adjacent fork
區間控制的控制策略包含敵對閉鎖和區間閉鎖2種策略,分別對應敵對閉鎖區域和區間閉鎖區域2種控制區間。當邏輯控制器執行完單路口控制邏輯后,需要判斷是否觸發區間控制策略,并優先執行區間控制的控制指令。
(1) 敵對閉鎖區域。如果某段巷道在同一時刻只允許單向通行,此時有車輛從一側路口駛入該段巷道,則巷道另一側路口需開啟敵對閉鎖,避免對向會車。敵對閉鎖控制邏輯如圖13所示。狀態1:車輛駛入左側①號岔路口的“閉鎖門限”時,左側①號岔口綠燈通行,左側②號、③號岔口紅燈禁行;右側岔口全部綠燈通行。狀態2:車輛駛出左側③號岔口的“解鎖門限”時,觸發敵對閉鎖邏輯,右側②號、③號岔口紅燈禁行,其他岔口綠燈通行。狀態3:車輛駛出右側路口,結束右側路口的敵對閉鎖。
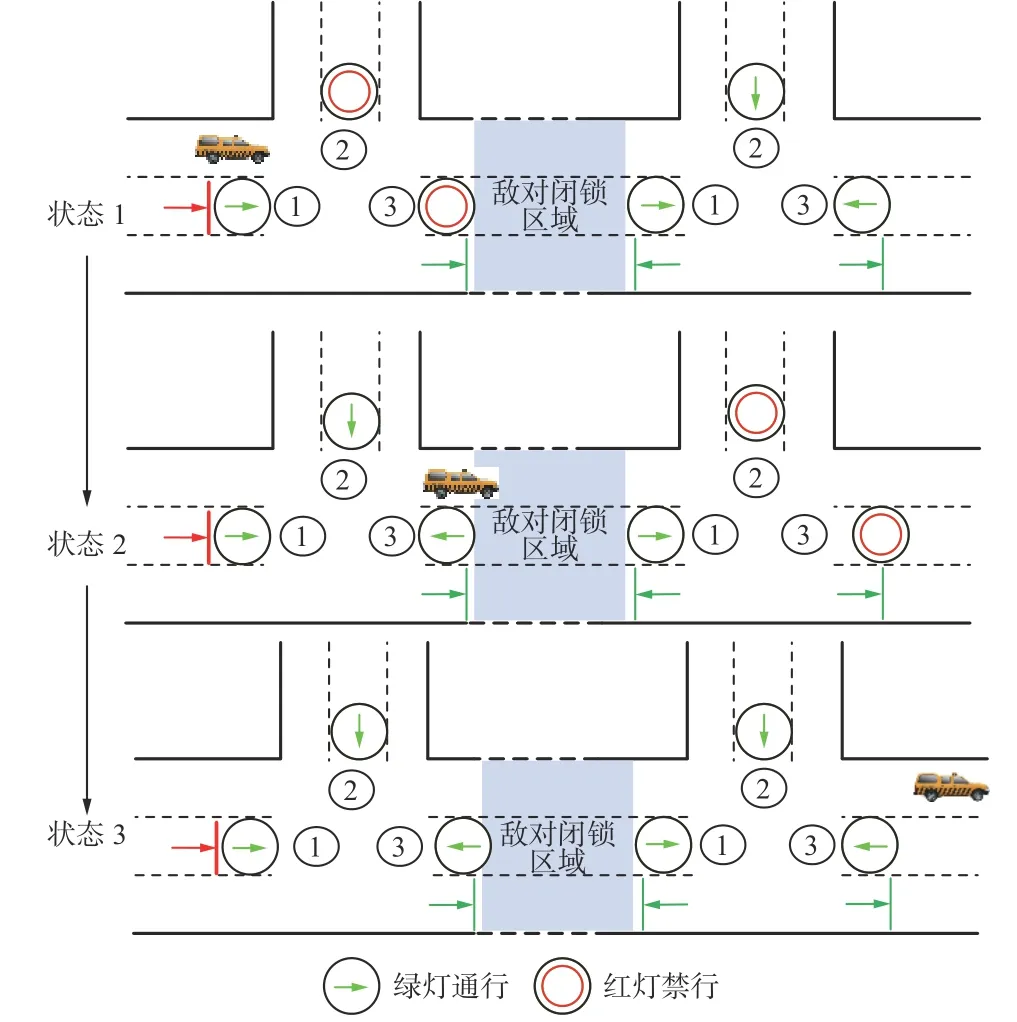
圖13 敵對閉鎖控制邏輯Fig. 13 Hostile lock control logic
(2) 區間閉鎖區域。如果某段巷道易發生擁堵,則開啟區間閉鎖,限制該段巷道內同一時刻的車輛數。區間閉鎖控制邏輯如圖14所示。狀態1:車輛同時從左側①號、③號岔口接近區間閉鎖區域,且尚未進入兩側路口的閉鎖區間時,2個路口全部為綠燈通行狀態。狀態2:車輛駛入兩側路口的閉鎖區間時,此時車輛未超過規定數量,左側①號岔口和右側③號岔口綠燈通行,其他岔口紅燈禁行。狀態3:當區間閉鎖區域內車輛數超過一定數量時,觸發區間閉鎖,左側①號、左側②號、右側②號、右側③號岔口紅燈禁行;左側③號、右側①號岔口綠燈放行。狀態4:當區間閉鎖區域內車輛數減少到一定數量時,結束區間閉鎖,執行單路口控制。
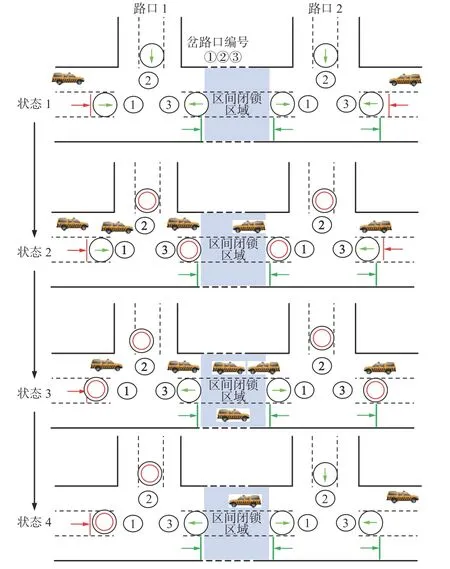
圖14 區間閉鎖控制邏輯Fig. 14 Section lock control logic
3.2 通信模塊
控制系統的通信模塊主要包括交通燈和聲光報警器的串口協議信息傳輸模塊、邏輯控制器與定位基站之間車輛信息傳遞的UDP協議傳輸模塊、相鄰邏輯控制器、邏輯控制器與上位機之間的Modbus TCP協議傳輸模塊。通信模塊的軟件代碼基于IEC61131-3規范標準進行開發,設計了通用的UDP協議模塊、串口協議信息傳輸模塊及Modbus TCP客戶端與服務器模塊。
3.2.1 串口協議信息傳輸模塊
控制系統以信息發布形式向交通燈和聲光報警器發布指令信息。串口協議信息傳輸模塊有Modbus RTU和私有協議2種,支持不同串口并行發送,相同串口順序發布。Modbus RTU協議為通用Modbus協議。私有協議執行GB2312-1980《信息交換用 漢字編碼字符集》標準,聲光報警器可自定義文字播報內容。邏輯控制器自動判斷當前串口通信設備的數量、協議長度及協議下發次數,將接收到的指令發送給串口通信設備。串口協議信息傳輸模塊會實時判斷當前在線設備的收發狀態、輸出設備的故障碼列表。
3.2.2 UDP協議傳輸模塊
UDP協議數據不可復用,所以在1個射頻接收周期內,僅有1個邏輯控制器能請求到有效數據報文,其他邏輯控制器只能請求到空數據報文。煤礦井下短距離內分布多個路口,1個邏輯控制器控制1個路口時需要獲取多個定位基站的UDP數據。如果不對UDP協議數據進行復用,會導致每個路口都需要重復加設多個基站,大大降低交通燈自動控制系統的競爭力。因此,控制系統設計了定位基站的主動輪詢、輪詢轉發、被動接收3種數據獲取策略。如果邏輯控制器配置的當前定位基站的數據獲取策略是主動輪詢,那么邏輯控制器會主動請求該定位基站發送UDP數據。如果邏輯控制器配置的當前定位基站的數據獲取策略是被動接收,那么邏輯控制器不會主動請求該定位基站發送UDP數據,而是等待其他配置為輪詢轉發的邏輯控制器將請求到的UDP數據轉發給自己。如果邏輯控制器配置的當前定位基站的數據獲取策略是輪詢轉發,那么邏輯控制器會主動請求定位基站發送UDP數據,并將接收到的UDP數據轉發給指定的配置為被動接收的邏輯控制器。通過采用帶有轉發機制的數據獲取策略,能夠大幅減少基站的安裝數量,從而提高交通燈自動控制系統的經濟性,降低定位基站的施工與維護成本。
UDP協議的收發之間不需要建立連接。因此,將UDP數據的接收模塊和發送模塊獨立進行管理,從而實現UDP數據的瞬時批量發送和隨機無序讀取[14]。發送模塊會判斷邏輯控制器配置的每一個定位基站的數據獲取策略,如果是被動接收策略,則直接跳過該定位基站,如果是主動輪詢或輪詢轉發策略,則立即發送請求指令向對應的定位基站獲取UDP數據。接收模塊循環接收每一條收到的UDP數據報文。通過數據報文中包含的定位基站站號,判斷當前UDP數據來源于哪個定位基站,并存入相應的定位基站數據集。如果當前UDP數據報文需要轉發給另一個邏輯控制器,則立即給該邏輯控制器發送獲取到的UDP數據報文。數據轉發的指令執行完畢后,才會接收下一條UDP數據報文。
3.2.3 Modbus TCP協議傳輸模塊
Modbus TCP協議傳輸模塊分為服務端和客戶端2個模塊。1個邏輯控制器啟動1個Modbus TCP服務端。上位機主動連接該服務端,向當前邏輯控制器傳輸配置信息,并實時獲取當前邏輯控制器的各種設備狀態。除了交通燈和路口聲光報警器,其他連接邏輯控制器的串口設備的控制指令均通過該服務端下發給對應的邏輯控制器。服務端中規劃了區域關聯控制點表,相鄰邏輯控制器能夠主動打開Modbus TCP客戶端,與當前邏輯控制器的服務端建立通信連接,讀取當前邏輯控制器服務端中的區域關聯控制信息。區域關聯控制信息主要包括相鄰路口處關聯岔口的出列車輛列表、歷史入列車輛列表等。區域關聯控制信息主要用于執行區域控制相關的邏輯判斷。
4 系統調試與應用
4.1 模擬巷道測試
模擬巷道內部共4條巷道,組成2個三岔路口和1個U形彎路口。根據該巷道的路口特征,設計搭建了交通燈自動控制系統。交通燈自動控制系統包含3臺KDW56B礦用隔爆電源,3個KXH18(D)本安型邏輯控制器,10個DXH15L(A)型本安交通燈,4 個KJ69J-D2礦用本安定位基站及1個KXB18A聲光報警器。3個邏輯控制器分別控制3個路口。各岔口均布置有一定數量的交通燈。路口Ⅰ布置3個交通燈,路口Ⅱ兩邊各布置2個交通燈,路口Ⅲ布置3個交通燈。每個交通燈均引出一路信號線和一路供電線,在邏輯控制器內部進行串接。信號線接在各自邏輯控制器的RS485-2上。交通燈和邏輯控制器均由可輸出6路18 V的礦用隔爆電源進行獨立供電。邏輯控制器內部集成以太網交換機,通過以太網與4個定位基站進行UDP通信。彎道報警器串接在路口Ⅱ邏輯控制器的RS485-3上。交通燈自動控制系統布置如圖15所示。
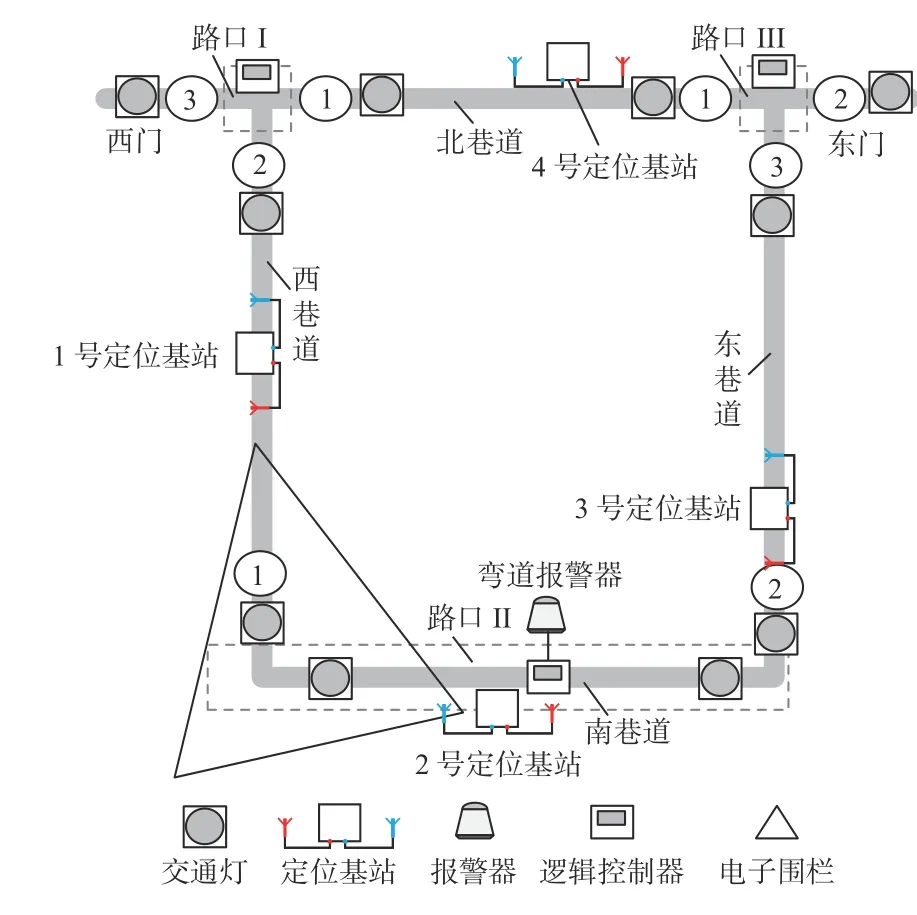
圖15 模擬巷道交通燈自動控制系統布置Fig. 15 Layout of traffic light automatic control system of simulated roadway
4.1.1 路口及彎道設置
模擬巷道共布置3個路口/4個基站。路口Ⅰ和路口Ⅲ為標準三岔口,路口Ⅱ為U型路口。在路口Ⅰ設置優先級,岔口①優先級為3,岔口②優先級為2,岔口③優先級為1。路口Ⅱ和路口Ⅲ不設置優先級。U型路口Ⅱ每側布置2個交通燈,其他路口每個岔口布置1個交通燈。所有路口的入列門限均設為15 m,閉鎖門限設為10 m,解鎖門限設為6 m,車輛最大停車時間為15 s,岔口最大放行時間為60 s,最大放行車輛數為3輛。
為測試交通燈自動控制系統的信息發布功能,在上位機圖形界面的西南角框取電子圍欄,安裝彎道報警器。彎道報警器接在路口Ⅱ邏輯控制器,由上位機發布報警信息。
4.1.2 UDP數據獲取策略設置
路口Ⅰ各岔口均采用被動接收的方式獲取基站數據。岔口①和岔口③接收路口Ⅲ處邏輯控制器轉發的4號定位基站的數據,岔口②接收路口Ⅱ處邏輯控制器轉發的1號定位基站的數據。
路口Ⅱ各岔口均采用輪詢轉發的方式獲取基站數據。岔口①獲取1號定位基站的數據并轉發給路口Ⅰ邏輯控制器,岔口②獲取3號定位基站的數據并轉發給路口Ⅲ邏輯控制器。
路口Ⅲ的岔口①和岔口②采用輪詢轉發方式獲取4號定位基站的數據并轉發給路口Ⅰ邏輯控制器,岔口③采用被動接收的方式接收路口Ⅱ處邏輯控制器轉發的3號定位基站的數據。
4.1.3 測試流程
首先,在路口Ⅰ和路口Ⅲ測試單路口邏輯。隨機進行放行閉鎖、解鎖、闖紅燈、優先放行、超時放行的測試,驗證邏輯代碼的正確性。
然后,進行連續路線交通燈自動控制系統性能測試。邏輯控制器內部設定的任務周期循環時間為200 ms,記錄下每次觸發自動控制的放行邏輯時邏輯控制器的任務執行時間與交通燈狀態切換的時間,測試流程如下:
(1) 車輛從西口駛入巷道內,進入路口Ⅰ。向南拐進西巷道,觸發放行邏輯時系統的周期時間為5 146 μs,交通燈切換狀態耗時0.88 s。
(2) 車輛繼續向南行駛,進入路口Ⅱ。標志卡進入電子圍欄,上位機發送報警指令,報警器閃爍紅燈并連續播報“車輛進入彎道,請注意避讓”。車輛繼續行駛拐入南巷道。標志卡從另一側走出電子圍欄,上位機發送停止指令,報警器立即停止閃爍和報警。到頭拐入東巷道,觸發放行邏輯時系統的周期時間為5 580 μs,交通燈切換狀態耗時0.91 s。
(3) 車輛沿東巷道向北行駛,進入路口Ⅲ。向東拐出至東門,觸發放行邏輯時系統的周期時間為5 240 μs,交通燈切換狀態耗時0.92 s。
(4) 車輛沿原路線返回,經過路口Ⅲ、路口Ⅱ、路口Ⅰ。此時沿線交通燈狀態相反。觸發放行邏輯時系統的周期時間分別為5 412 ,6 041和5 880 μs,交通燈切換狀態耗時分別為0.91,0.87和0.89 s。
測試結果表明:交通燈自動控制系統相關控制邏輯均正確。邏輯判定響應時間遠小于系統內部循環周期(200 ms),交通燈狀態切換延遲小于1 s。彎道報警器正確報警,信息發布系統運行正常。
4.2 現場驗證
中煤陜西榆林大海則煤業有限公司大海則煤礦使用無軌車輛執行井下運輸任務,在錄車輛約140輛,運輸線路不固定且運輸任務繁重,重要路口流量大。
大海則煤礦交通燈自動控制系統布置如圖16所示。交通燈自動控制系統在該現場已安裝運行6個月,重點布置管控4個路口。1號邏輯控制器布置在聯絡巷三岔路口,處于副立井升井通道附近,各向車流量較大,車輛在路口聯巷內無序停車,缺乏有效的路口管控機制。2號邏輯控制器布置在北翼輔運聯巷三岔口處,此處為北翼交通要道,存在路口視野盲區。3號邏輯控制器布置在南翼入口,控制四岔路口。4號邏輯控制器布置在南翼輔助運輸大巷入口處,該處設置有風門,存在會車盲區。3號和4號路口間距較短,中間僅設置1個定位基站,減少短距離相鄰路口處定位基站的安裝數量。
觀察一段時間的運行狀態,結果顯示:
1號邏輯控制器連續放行一側車輛后正確切換另一側車輛放行,執行優先放行。實現車流均衡放行,不在某一側堆積擁堵。配置停車時間門限為15 s,防止放行岔口內車輛長時間停車影響其他岔口放行。由于運行流量較大,后續又適當增大了入列門限、閉鎖門限和解鎖門限的距離,擴大路口控制區域。
2號邏輯控制器一側車輛接近路口,交通燈狀態提示另一側禁行,能夠提高盲區錯車效率與安全性。實際生產運行過程中,右側岔口無車進入,因此直接通過上位機將當前路口配置為一個直角路口,減少設備配置數量。
3號與4號邏輯控制器共用相同基站的UDP數據,分別采用輪詢轉發和被動接收的方式共用關聯路段內基站的UDP數據,數據傳輸穩定,最大數據接收延遲小于300 ms,符合邏輯判斷實時性要求。驗證了UDP收發模塊的穩定性。
3號邏輯控制器所在路口為一個四岔口,有一側岔口未開放通行。經觀察,將當前上位機配置為四岔口,不影響實際三岔口的運行,驗證了當前系統配置的廣泛適配性。
4號邏輯控制器發布的交通燈狀態能夠實時指示風門兩側車輛執行直接通過或等待放行,優化了風門盲區處的通過機制。
邏輯控制器存儲的闖紅燈信息能實時發布在上位機系統上。邏輯控制器配置有控制異常報警機制,出現基站故障,所有交通燈顯示故障狀態。通過上位機發布定時切換或PC控制指令,邏輯控制器切換交通燈狀態,實現遠程控制。
5 結論
(1) 交通燈自動控制系統通過UWB精確定位分站獲取車輛定位卡數據信息。依據UWB精確定位基站的技術特征,系統設計了位置信息和行駛狀態2個控制參數,確定了定位基站在典型路口處的分布要求,規定了岔口的排序原則和優先級。
(2) 交通燈自動控制系統集成了自動控制、手動控制和定時切換3種控制模式,設置了多種放行機制和區間管控策略。結合控制系統具體的通信需求,交通燈自動控制系統對通信模塊進行了優化,設計了通用的UDP協議傳輸模塊、串口協議信息傳輸模塊及Modbus TCP客戶端與服務器模塊。
(3) 交通燈自動控制系統在模擬巷道的測試表明:交通燈自動控制系統的邏輯代碼運行正常,邏輯響應時間小于200 ms,交通燈狀態切換的響應時間小于1 s。信息發布系統運行正常,彎道報警器能正確執行報警指令。控制系統的控制性能穩定,控制時效性高。
(4) 交通燈自動控制系統在大海則煤礦現場的使用狀況良好,車輛管控效果顯著,進一步驗證了交通燈自動控制系統的管控性能。路口信息配置靈活,能夠高度適配現場各個形式的路口,滿足具體的路口管控需求;通過調整控制門限,控制系統能夠調整路口控制區域的大小,適應現場運輸流量的變化;定位基站采用不同的數據獲取策略,減少了精確定位分站的安裝數量,降低了交通燈自動控制系統的施工成本;交通燈自動控制系統整體接入輔助運輸上位機,真正實現了信息監測、信息發布和遠程輔控;上位機能夠實時監測井下車輛的交通調度狀態,監控車輛的駕駛行為,實現了交通燈的遠程管控,提高了輔助運輸系統的集成化、信息化和網絡化水平。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32