大功率無刷直流電機反電動勢過零點檢測策略
2022-07-08 03:04:18李渤通
電子技術與軟件工程 2022年1期
關鍵詞:檢測
李渤通
(中國科學院長春光學精密機械與物理研究所 吉林省長春市 130000)
1 引言
BLDCM(無刷直流電機)因其能量轉化率高、噪音小、體積輕巧、運行可靠且維修成本低等優點,在生活中的各個方面都有所應用。它以電子換向邏輯代替機械換向形式,對比傳統的控制方法,電子換向技術需要根據當前轉子的位置信息來確定各相上下橋臂開關管的導通狀態,其位置檢測方法總共分為兩類,包括有位置傳感器以及無位置傳感器檢測方法。其中有位置傳感器檢測方法可以在BLDCM 的控制過程中提供準確的位置信息,使得控制精度更高,控制邏輯更為簡單,也可以大大降低對芯片計算能力的要求。然而面對一些極端工況,例如高溫高壓等惡劣工作環境,位置傳感器的位置信息反饋信號可能會受到較大影響。同時在一些對于控制精度要求不高的情況下,位置傳感器對實際效果提升較小,卻使得成本投入大大增加。無位置傳感器對于某些極端工況適應性更強,可以獲得更為廣泛的應用場景,同時結構設計更為簡單,大大降低了使用及安裝成本。
國內外眾多學者針對無位置傳感器位置檢測方案做出了諸多研究,其中反電動勢檢測法的應用較為廣泛,其主要根據相反電動勢來檢測轉子的位置信息,其核心是針對反電動勢變化中過零點的檢測。反電動勢檢測法又包括以下幾種方法[1][2]:相電壓反電動勢法、基波反電動勢法、三次諧波反電動勢法、續流二極管狀態檢測法等。近些年來,隨著神經網絡、模糊控制等現代控制算法的逐漸完善,也在電機控制領域中得到應用,這也為現代電機控制理論指明了全新的研究方向[3][4]。
文獻[5]提出了端電壓反電動勢法,主要方法為通過數學建模推導端電壓與相反電動勢間的關系,借助硬件電路實現端電壓檢測,并推算出相反電動勢過零點,利用過零點與電機換相點之間的相位關系進行電機控制。端電壓法尤其適用于BLDCM 的六步控制方法,因為在六步法控制中,電機三項繞組為二二制導通,三相中的一相始終為對地浮空狀態,這使得端電壓檢測具有了良好的檢測時機和條件,但是同時由于BLDCM 存在換相續流情況,若換相續流時間大于1/2扇區的運行時間,則會導致反電動勢過零點無法被檢測,進而導致換相失敗。
本文提出一種基于單片機時序邏輯的反電動勢過零點檢測策略,在大功率的工況下,可以有效避免因續流時間過長而引起的無位置傳感器位置檢測策略失效問題,從而大大提高了系統穩定性以及算法的可應用范圍。
2 數學建模
2.1 控制方法
本文在驅動端采用三相全控電路實現對于三相無刷直流電機的驅動,如圖1 所示,此種控制電路對定子繞組的利用率更高,且可以有效減小轉矩波動,其中靠近母線電壓正極一側橋臂定義為上臂,負極一側為下臂。
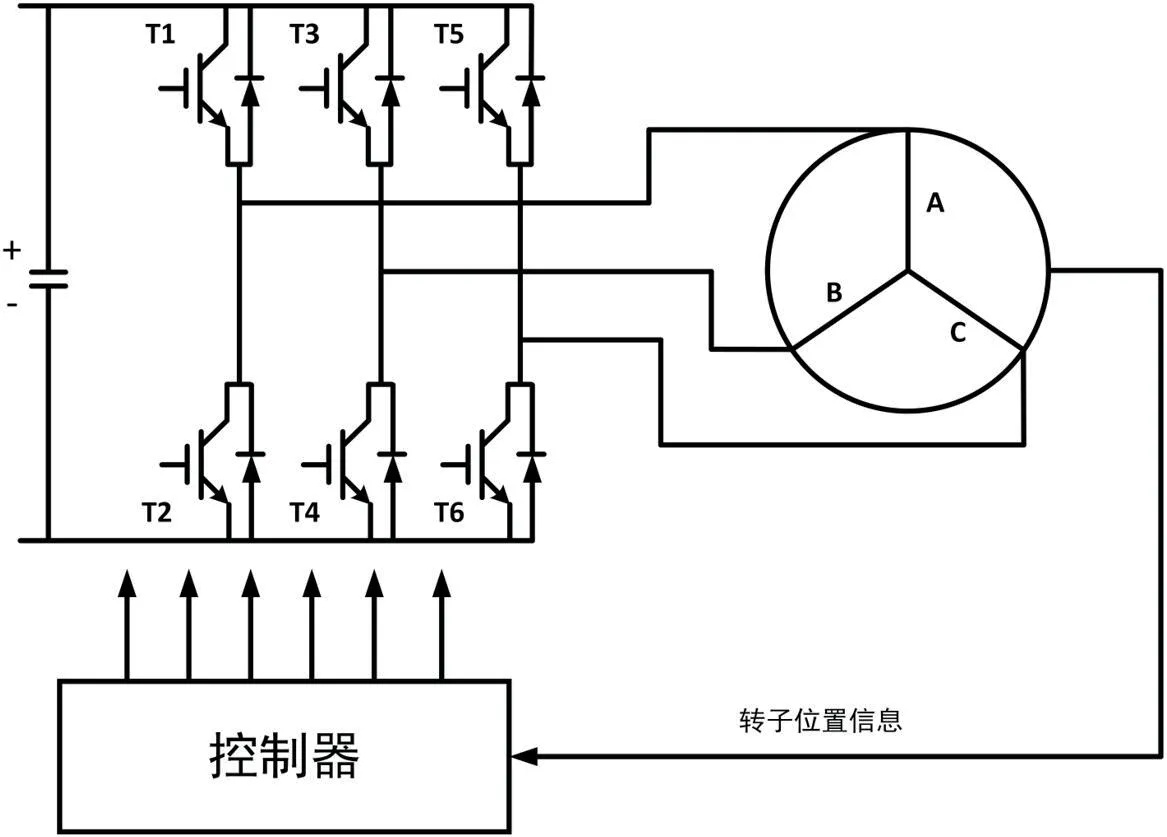
圖1:三相全控電路
采用六步法控制方法驅動電機,兩相處于導通狀態,另一相處于浮空狀態,在三相電機中共存在六種導通情況,其中“+”表示該相上臂導通,“-”表示該相下臂導通。六種導通情況如圖2 所示,六個合成磁場矢量將360°電角度周期分成六等份,相鄰矢量圍成的扇形區域稱為一個扇區。

圖2:六步法合成磁場
2.2 建模推導
為了對三相BLDCM 進行數學建模,進行條件假設:
(1)忽略BLDCM 的鐵芯飽和效應、電樞反應以及齒槽效應;
(2)忽略換相續流等問題。
對于三相BLDCM 進行數學建模,電壓方程如下式:

表達式中ia、ib、ic為相電流;ua、ub、uc為相電壓;ea、eb、ec為三相反電動勢;Un為中性點電勢;ra、rb、rc為相電阻;La、Lb、Lc為定子繞組自感;Mab、Mbc、Mac為定子繞組兩兩之間的互感。
在理想條件下,電機各項繞組在空間對稱分布,其電阻值、電感值以及互感值相等。同時各相電流符合以下公式:

故可將(1)式化簡為:

其中Lσ=Ls-M,稱為等效電感,Ls為各繞組自感,M 為繞組間互感。
根據上式可以得到等效電機電路,如圖3 所示。

圖3:三相BLDCM 等效電路
本文采用H_PWM-L_ON 型PWM 調制方式,兩相導通過程中上臂以PWM 形式導通,下臂恒通,同時忽略諧波干擾,定義高電平持續時間為有效矢量作用時間,低電平持續時間為零矢量作用時間,以六步法中A+B-為例,建立等效電路[6]如圖4 所示。

圖4:等效電路
當A 相上臂由有效矢量切換為零矢量作用時,遵循電流不能突變的原則,在電機定子繞組寄生電感的作用下處于續流狀態,可以列寫此時的電路方程,根據等效電路,該相端電壓為:

忽略A 相中二極管的導通壓降,可得電路方程如下:

忽略B 相中二極管的導通壓降,可得電路方程如下:

將(5)與(6)合并,可得:

由于三相系統為平衡系統,忽略諧波項,只考慮基波可以得到以下結論:

根據(7)和(8)可得:

由(4)和(9)可得:

綜上所述,在上臂處于零矢量作用時刻,忽略諧波干擾,相端點處的電壓與相反電勢線性相關,可以通過對零矢量作用時間的端電壓檢測結果作為反電動勢過零的判斷依據。同時,為了達到最大轉矩電流比,六步法換相點的最佳時刻應該在反電動勢過零點后延遲三十度電角度的電機運行時間。
3 換相續流分析
六步法控制方法的換相原理導致換相后浮空相會發生切換,同時電機三相繞組具有寄生電感,相電流不發生突變,所以浮空相中的相電流會出現續流現象。
三相電機存在兩種換相續流的情況,其一是向正母線電壓續流,其二為向負母線電壓續流[7],情況一如圖5 所示。

圖5:換相續流
圖5(a)、(b)、(c)展示了換相前、換相后以及換相時刻三個時期的電流流向。在換相前后,電流由U+V-切換至U+W-,導通順序切換之后,V 相中的電流通過上臂二極管實現續流,忽略其導通壓降,則會將V 相端電壓拉高至總線電壓。
同理可得,若導通順序由U+V-切換到W+V-,在換相前后,U 相中的電流通過下臂二極管續流,忽略導通壓降,會導致U 相端電壓接地。
若電機運行時速度較快,且電流很大,則有可能導致續流狀態持續時間超過1/2 扇區的電機運行時間,導致過零點無法被檢測到,而在大功率、高總線電壓驅動的應用場景中,端電壓很難維持在總線電壓正極的電位,故向正電壓一側續流持續時間很短,只需要處理向總線電壓負端續流的情況。
4 反電動勢過零點檢測策略
首先基于STM32F302R8 硬件平臺,設計時序確定檢測位置。
浮空相端電壓在PWM 零矢量作用時間包含三個階段,共四個時間節點,設為t0、t1、t1’、t2:
t0-t1階段:電容放電階段。在此階段電容將有效矢量作用時積蓄的能量釋放,端電壓逐漸降低到0,此時電容放電完畢;
t1-t1’階段:寄生電感續流階段。遵循電流不可突變原則,寄生電感會維持電容放電階段的電流,此時下臂續流二極管打開,端電壓的值被鉗位至二極管導通壓降,若忽略壓降,則端電壓等于0;
t1’-t2階段:反電動勢階段。當寄生電感續流時間結束,意味著鉗位結束,此時端電壓將逐漸上升至3/2 倍的該相反電動勢的值。
綜上所述,在PWM 零矢量作用時間,越靠近作用時間結束時刻,反電動勢的值越會準確地反映在端電壓上,所以檢測時刻選擇位置應盡量靠近PWM 上升沿處。
為了端電壓檢測更為準確,應用單片機設計時序來確定端電壓檢測位置。
本文借助單片機AD 采集模塊實現端電壓檢測,時序上采用雙時鐘模式,分別設置為TIM1 和TIM2,配置為同步時鐘模式,時鐘周期相同。
其中TIM1 時鐘用以生成PWM 脈沖,配置為中心對齊,采用PWM1 模式。當計數值大于比較值PWM 切換為低電平,當計數量小于比較值PWM 切換為高電平;
TIM2 時鐘用以觸發單片機ADC 功能,配置為邊沿對齊,采用PWM2 模式。當計數值大于比較值PWM 切換為高電平,當計數值小于比較值PWM 切換為低電平。當計數值等于比較值時設立觸發事件,此時單片機進行AD 采集,TIM1 時鐘以及TIM2 時鐘的時序如圖6 所示。
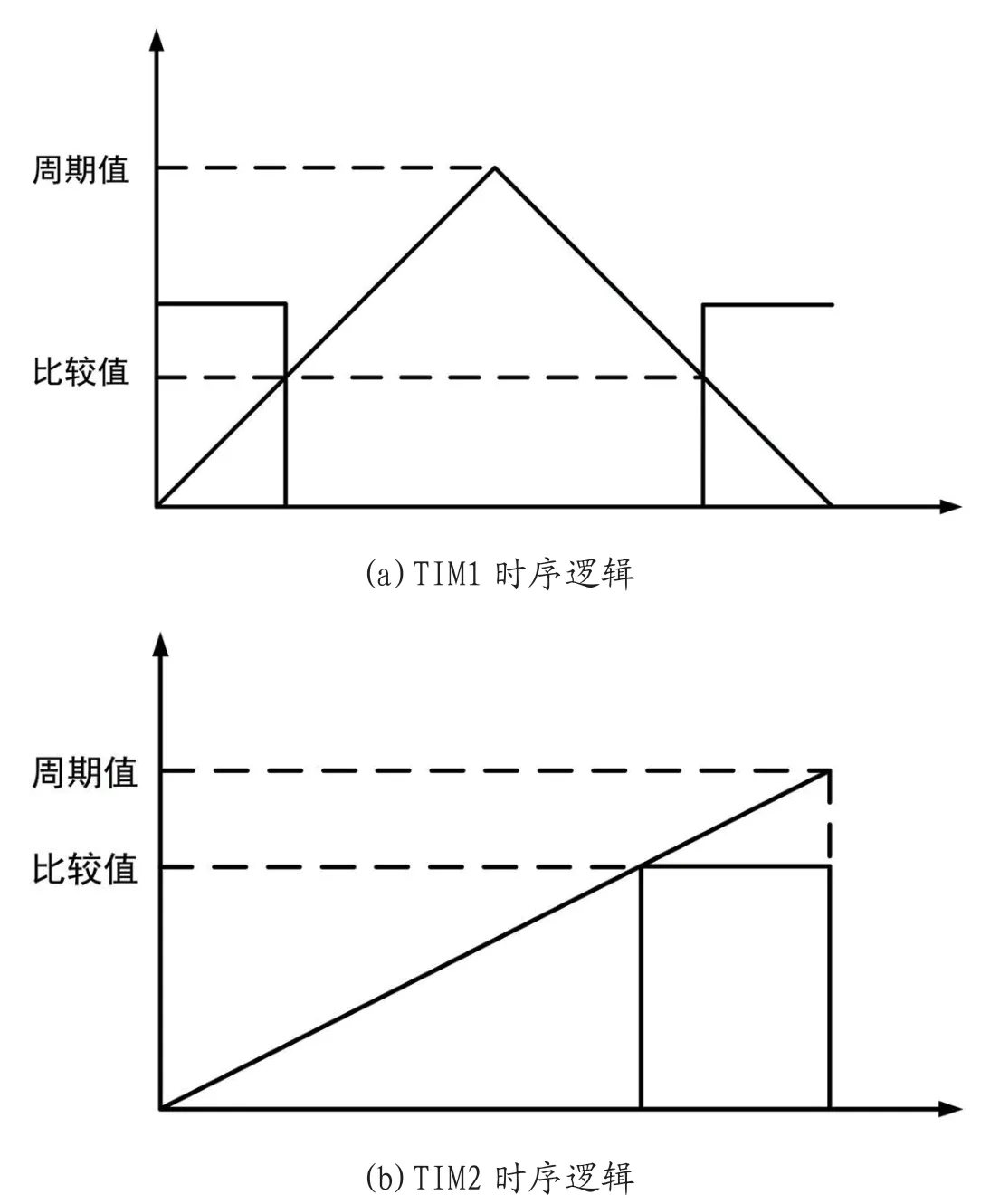
圖6:TIM1 和TIM2 時序邏輯
TIM1 和TIM2 的周期值與比較值滿足如下公式:

其中PR1為TIM1 周期值,CR1為TIM1 比較值;PR2為TIM2 周期值,CR2為TIM2 比較值。TAD為AD 采集時間,f 為時鐘頻率。以此為依據設計時序,可以在保證AD 采集準確度的情況下,盡可能準確地選取端電壓的AD 采集位置,使得采集位置盡量靠近的PWM 零矢量作用結束時刻。
在換相續流過程中,電流從地流入使得端電壓被拉低至0 位。當端電壓處于續流狀態下,此時電平狀態不受PWM控制,即使在PWM 有效矢量作用時間,端電壓依然處于鉗位狀態,此時AD 采集值為0,所以可以利用端電壓在續流未結束時存在這樣的鉗位狀態,進而判斷換相續流時間是否結束。
對應單片機時序邏輯,在TIM1 時鐘計數值向上計數過程中計數到比較值的時刻設立觸發中斷,在中斷里對端電壓進行AD 采集,此時采集值為端電壓在PWM 高電平結束時刻的端電壓值。
若此時AD 采集值不為0,即續流狀態結束之后,在下一個PWM 低電平處繼續對端電壓進行AD 采集,此時存在兩種情況:
(1)檢測值大于零,說明此時反電動勢過零點位置尚未到達,未被續流所覆蓋,進行正常檢測流程,檢測到零點之后延遲三十度換相;
(2)檢測值為0,則認為過零點已經被續流時間所覆蓋,此時根據單片機計數值以及計數時間可以計算該扇區運行時間,根據當前速度和當前運行時間可以計算扇區剩余時間,延遲輸出換相信號。
檢測流程圖如圖7 所示。

圖7:反電動勢過零點檢測流程
5 實驗驗證
BLDCM 硬件系統主要分為兩部分:主控部分和驅動部分。前者的作用是接收數據信號反饋,完成控制算法部分的數據處理,并輸出控制指令給驅動板完成整個控制流程;驅動板根據主控板的控制指令驅動BLDCM 運行,并輸出反饋信號給驅動板。為實現實驗驗證,搭建硬件試驗驅動平臺,如圖8、圖9 所示。

圖8:硬件驅動電路板

圖9:實驗測試平臺
實驗平臺將無刷直流電機接入到磁粉測功機平臺上,方便給工作狀態下的電機增加或減少負載。在實驗過程中,PWM 載頻設置為16k,軟件調試采用IAR8.3 版本。
結合項目需求,設計了最高適用于300V 母線電壓控制的大功率無位置傳感器BLDCM 控制硬件電路。本課題選用測試電機參數如表1 所示。

表1:電機主要參數
電機驅動過程某一相端電壓測試結果如圖10 所示。

圖10:端電壓波形
可以得出結論,在換相續流時間超過1/2 扇區時間的情況下,應用本文過零點檢測邏輯可以實現正常換相。
6 結論
無位置傳感器無刷直流電機在各個領域應用廣泛,本文基于STM32F302R8 硬件平臺,針對端電壓檢測法在換相續流時間大于1/2 扇區運行時間時無法正常換相的情況,對傳統檢測策略進行進一步的研究與拓展,提出新的過零點檢測策略,并搭建硬件實驗平臺,驗證了算法的可行性。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48