基于PCA算法的隧道點云橫斷面特征提取研究
2022-07-08 05:41:30陳艷華丁鴿
城市勘測 2022年3期
關鍵詞:方法
陳艷華,丁鴿
(1.濟南市房產測繪研究院,山東 濟南 250001; 2.濟南市勘察測繪研究院,山東 濟南 250013)
1 引 言
三維激光掃描技術不斷發展、完善,國內研究如火如荼,近十年來國內三維激光掃描技術在建筑制圖、城市規劃和基礎測繪等方面都取得了顯著成果,此外,在巖土滑坡、大壩的動態安全監測中也得到廣泛應用。
Darion Grant2012年提出無須任何標靶點配準的新方法——P2P方法在模擬和真實三維掃描數據得到驗證,結果顯示配準精度相對1991年Chen和Medioni提出的方法提高了四倍[1]。Zahra Lari2014年利用掃描點云的內部屬性,通過不同類型特征的屬性信息對點云進行分類,實例驗證了提取直線特征的自適應方法的可行性[2]。冒愛泉,朱益虎等2014年利用高精度檢校場通過全站儀與三維激光掃描儀Leica C10測量結果對比評定其精度[3]。Shahar Barnea等2007年在沒有先驗信息的前提下提出點云配準的方法,通過提取點云集的特征子集降低了搜索全部配對點集的不確定性,提高了點云配準的精度,該方法可應用于多站掃描點云配準[4]。Marko Pejic等2014年基于ISO17123通用標準對三維激光掃描儀的精度進行測試,指出控制點多于三個時再增加控制點個數對轉換精度沒有明顯提高[5]。2011年王玉鵬,盧小平等經過嚴密檢校場實驗得出Leica ScanStation2型掃描儀的點位精度在 40 m和 80 m分別為 ±4.7 mm、±6.3 mm,該方案利用因瓦尺的精密刻度,采用前方交會及三角測量方法對標靶點掃描提取坐標,驗證了實際環境掃描精度達到標稱精度 ±6 mm@50m[6]。2013年謝雄耀,盧曉智等將地面三維激光掃描技術用于隧道相對變形測量,以上海市西藏路電力隧道和長江西路公路隧道為例采用6測站和12個標靶拼接了全斷面模型,證明三維激光隧道掃描結果與全站儀測量結果相差 2 mm以內,保證了三維激光掃描技術應用于隧道安全監測的可靠性[7]。2020年朱璟,付建紅在復雜的鐵路場景下,提出了針對三維激光點云被遮擋或缺失情況下的穩健鐵路中心線計算方法,在既有線高精度勘測中具有廣泛應用前景[8]。
2 三維激光掃描原理
三維激光掃描儀采用多點測量原理,通過全景掃描獲取目標的三維信息,包括點云空間數據、顏色、反射強度等信息。以原點向任意方向發射激光信息,獲取目標反射掃描點P的三維坐標(X,Y,Z)為:
(1)

圖1 三維激光掃描測量原理示意圖
本文實驗采用的RIEGL VZ-400三維激光掃描儀通過無接觸掃描對象方式采集點云數據,其主要參數指標如表1所示:
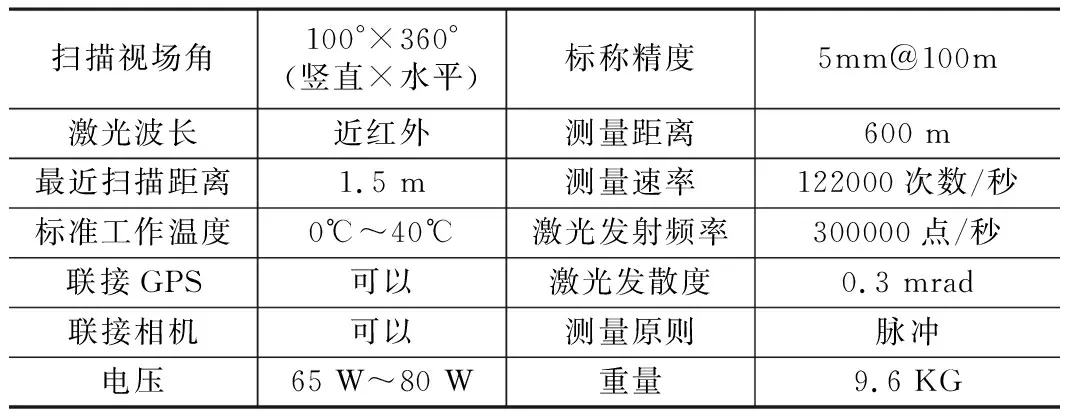
RIEGL VZ-400掃描儀主要參數指標 表1
3 LS-PCA組合分析方法
最小二乘方法,通過誤差平方和最小化計算變量之間的最佳函數匹配關系,該方法在進行數據擬合時,將所有數據均用于運算,使得結果受到某些“不利”數據的影響[9]。Hoppe提出利用PCA評估每個采樣點“臨域”,并進行平面擬合和法向量計算的方法[10],PCA可以理解為最小二乘的幾何優化或等效于最大似然估計,并在精度和效率上優于最小二乘方法,因此,該方法在平面擬合上得到廣泛的應用。本文將兩種算法進行結合,解決了點云數據中“不利”因素的影響,提高了特征提取的精度。
3.1 最小二乘法
假設三維平面點數據為{Pi(xi,yi,zi);i=1,…,n},擬合平面定義為:
ax+by+cz+d=0
(2)
式中a,b,c是平面參數,d為平面三維掃描數據點到擬合平面的距離,該距離可表示為z=f(x,y),則z方向的方差累積最小化表示如下:
(3)

(4)
(5)
3.2 主成分分析法
對3D點云數據{Pi(xi,yi,zi);i=1,…,n},n個點的協方差矩陣為式(6):
(6)
設平面方程為:
xcosα+ycosβ+zcosγ+p=0
(7)
ax+by+cz=d,a2+b2+c2=1
(8)
cosα,cosβ,cosγ為平面上點(x,y,z)處的法向量方向余弦,|p|為原點到平面的距離。式(7)轉化為式(8),求平面方程轉化為求a,b,c,d四個參數。任一數據點(xi,yi,zi)到該平面的距離為:
di=|axi+byi+czi-d|
(9)
(10)
將f分別對4個未知參數a,b,c,d求偏導,將參數d帶入(10)得公式(11):
(11)
(12)
由上式可得求解位置的參數(a,b,c)T為系數矩陣的一個特征向量,對應特征值λ,該系數矩陣即為協方差矩陣的等價公式。由式(8)和特征方程Ax=λx得出式(13)。
(13)
3.3 LS-PCA組合分析法
(1)利用最小二乘方法擬合平面獲得平面公式ax+by+cz+d=0,求得平面點云各點到擬合平面的距離d。
(2)計算擬合平面點云由(1)求得的距離d的中誤差σ,當各點距離di>2σ,刪除該點,否則保留。
(3)對去除噪聲的點云數據利用主成分分析方法擬合,以獲得擬合平面的參數。
(14)
3.4 實驗設計
選取38 cm×38 cm的塑料、木板做掃描對象,采用RIEGL VZ-400掃描儀,設置掃描分辨率為 2 mm、5 mm、1 cm,掃描距離為 50 m,木板點云數據的邊緣噪聲明顯,如圖2所示,利用LS和LS-PCA方法分別進行擬合,得到擬合結果對比如表2所示。
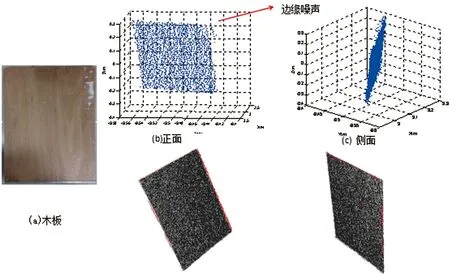
圖2 木板、木板點云及邊緣噪聲
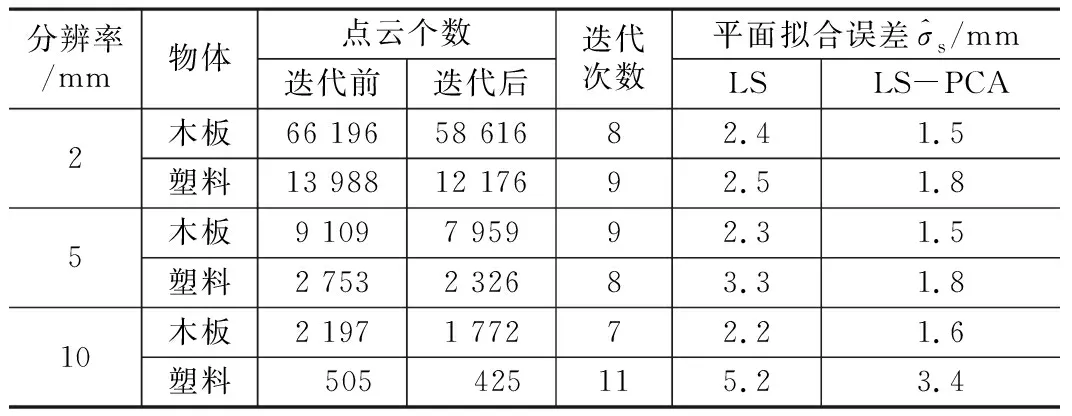
點云平面擬合計算結果 表2
從圖2和表2看,木板的“邊緣噪聲”較為明顯,掃描儀的工作機制為發射激光束,物體表面反射信號回掃描儀,其中反射物體表面因不平滑出現“漫散射”,邊緣因入射角較大、激光束信號強度較弱,掃描儀的精度受限,因此,在掃描物體邊緣時采用不同分辨率,對較為光滑的平面(如木板)采用較大采樣間隔,對較為粗糙的平面(如塑料)采用較小采樣間隔以減少邊緣效應對掃描質量的影響。
從表2中看出,LS-PCA算法的迭代次數大致相同說明該算法有較好的穩定性,平面擬合誤差較小說明該算法有較好的擬合精度。同時,掃描對象表面越粗糙、掃描分辨率越大,算法的平面精度越差,對不同粗糙程度的擬合效果也顯示出本算法有較廣泛的適用性。
4 隧道點云橫斷面特征提取案例
李健,萬幼川等將三維激光掃描技術用于地鐵隧道的監測,在保證特征信息的情況下,對掃描的點云運用基于法向量差異的分割算法簡化,構建模型,該方法提高了運算速度和精度[11]。本文方法主要針對側面、地面為平面的隧道,通過對各幾何平面的特征信息的整合計算斷面的平面位置,隧道點云截取部分如圖3所示,具體流程如下:

圖3 隧道掃描實驗場
(1)將儀器架設在隧道斷面中心位置,對中整平,全景掃描隧道,截取部分掃描點云如圖3右圖所示;
(15)
(4)計算點云到基準平面的距離截取所需任何位置、任何寬度(點云區域范圍內)的橫斷面。
利用上述方法獲得某一測站橫斷面如圖4所示,其中左圖距掃描儀中心位置 6 m,橫斷面寬度為 0.2 m,4個橫斷面的位置范圍分別為[5.9,6.1]、[6.9,7.1]、[7.9,8.1]、[8.9,9.1](單位為m)。右圖距掃描儀中心位置 6 m,橫斷面寬度 0.5 m,3個橫斷面的位置范圍分別為[5.75,6.25]、[6.75,7.25]、[7.25,8.25](單位為m)。
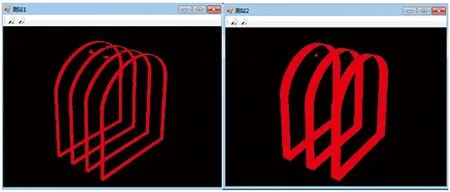
圖4 點云橫斷面示意圖
5 結 語
三維激光掃描點云數據存在大量“邊界噪聲”,最小二乘方法擬合平面時包含了所有三維點集,導致擬合方差較大、效果較差。主層次分析(PCA)法對邊界噪聲點云影響較為敏感,通過降維能夠提取出隱含的數據本質內容。本文結合兩種方法的優勢,通過實驗驗證了最小二乘——主成分分析(LS-PCA)方法的適用性和可行性,對隧道點云特征平面擬合提取任意橫斷面點云提供了新思路,為三維激光掃描技術在隧道點云特征提取應用中提供了指導意義。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
