關(guān)于礦用掘進(jìn)機(jī)自動截割控制系統(tǒng)的研究
2022-07-08 01:13:00韓偉
機(jī)械管理開發(fā) 2022年4期
韓 偉
(霍州煤電集團(tuán)辛置煤礦機(jī)電科, 山西 霍州 031400)
引言
在煤礦采掘工作面中,懸臂式掘進(jìn)機(jī)是非常重要的機(jī)電裝備,也是煤礦巷道掘進(jìn)以及煤巖破碎的主要工具[1]。但是受到煤礦開采技術(shù)水平的限制,我國很多煤礦中使用的掘進(jìn)機(jī)仍然通過人工方式進(jìn)行操作[2]。這種操作模式效率相對較低,且煤礦巷道成形精度不高,已然無法滿足現(xiàn)代化高效率開采的基本需要[3]。為了解決該問題,國內(nèi)很多學(xué)者和技術(shù)人員以礦用掘進(jìn)機(jī)為研究對象,在自動截割控制系統(tǒng)方面開展了一系列分析和研究,取得了一定的研究成果[4]。通過自動截割技術(shù)的實(shí)踐應(yīng)用,能降低人工的勞動強(qiáng)度,提升礦用掘進(jìn)機(jī)的工作效率以及煤礦巷道的成形精度[5]。本文主要以EBZ135 型礦用懸臂式掘進(jìn)機(jī)為研究對象,對其自動截割控制系統(tǒng)進(jìn)行了設(shè)計和研究,并將其應(yīng)用到煤礦工程實(shí)踐中,取得了較好的效果,可以為其他煤礦企業(yè)提供很好的借鑒。
1 礦用掘進(jìn)機(jī)的整體結(jié)構(gòu)概述
本文主要以煤礦中使用比較多的懸臂式EBZ135 型掘進(jìn)機(jī)為研究對象。如圖1 所示為該型號掘進(jìn)機(jī)的整體結(jié)構(gòu)簡圖。由圖可知,整個掘進(jìn)機(jī)是一個非常復(fù)雜的機(jī)電系統(tǒng),內(nèi)部包含很多機(jī)械結(jié)構(gòu)和系統(tǒng),各個結(jié)構(gòu)和系統(tǒng)之間協(xié)調(diào)配合才能夠?qū)崿F(xiàn)掘進(jìn)機(jī)的各項(xiàng)功能。EBZ135 型掘進(jìn)機(jī)整體質(zhì)量將近40 t,長×度×高為8930 mm×2800 mm×1550 mm。裝機(jī)總功率、泵站功率和截割功率分別為245 kW、100 kW 和135 kW。截割頭正常工作時的轉(zhuǎn)動速度為44 r/min,履帶行走速度可以在0~8 m/s 范圍內(nèi)調(diào)整。目前,該設(shè)備的控制系統(tǒng)相對較為落后,導(dǎo)致掘進(jìn)效率無法提升,亟需針對該設(shè)備設(shè)計研究自動截割控制系統(tǒng)。

圖1 EBZ135 掘進(jìn)機(jī)的整體結(jié)構(gòu)簡圖
2 掘進(jìn)機(jī)自動截割控制整體設(shè)計
2.1 系統(tǒng)整體框架
未使用自動截割控制系統(tǒng)前,EBZ135 型掘進(jìn)機(jī)需要工人在操作臺上對電液比例閥的開關(guān)進(jìn)行手動操作,從而控制液壓缸的伸縮和高低調(diào)整動作。本研究的目的是實(shí)現(xiàn)以上動作的自動化控制。為了實(shí)現(xiàn)自動化效果,需要在掘進(jìn)機(jī)機(jī)身部位和液壓缸部位安裝傳感器,對設(shè)備的工作狀態(tài)進(jìn)行實(shí)時檢測。然后利用數(shù)據(jù)采集裝置對傳感器獲得的數(shù)據(jù)進(jìn)行收集,并傳入計算機(jī)控制系統(tǒng)中進(jìn)行分析。另外,還需要控制驅(qū)動器,控制器下達(dá)的指令需要通過驅(qū)動器執(zhí)行后,才能夠?qū)崿F(xiàn)液壓缸的伸縮和高低調(diào)整動作。設(shè)計的掘進(jìn)機(jī)自動截割控制系統(tǒng)整體方案框圖如圖2 所示。

圖2 掘進(jìn)機(jī)自動截割控制系統(tǒng)整體方案框架圖
2.2 主要工作原理
距離傳感器對液壓缸的伸縮量和高低調(diào)整量進(jìn)行檢測,檢測信號為電壓信號,通過數(shù)據(jù)采集卡進(jìn)行收集,并基于A/D 轉(zhuǎn)換器將其轉(zhuǎn)換成為數(shù)字量信號,傳入到上位機(jī)中。智能經(jīng)緯儀對掘進(jìn)機(jī)的空間位置進(jìn)行檢測,檢測數(shù)據(jù)同樣通過數(shù)據(jù)采集卡收集,然后傳入上位機(jī)。上位機(jī)控制器對傳入的信號進(jìn)行綜合分析,然后下達(dá)控制指令,并將控制信號上傳到COMPACTRIO 控制驅(qū)動器中。驅(qū)動器對電液伺服閥進(jìn)行控制,最終實(shí)現(xiàn)掘進(jìn)機(jī)截割臂對液壓缸的伸縮和高低調(diào)整的自動化控制,達(dá)到自動截割的效果。
3 主要硬件設(shè)施和軟件的設(shè)計
3.1 主要硬件設(shè)施
1)距離傳感器。通過對掘進(jìn)機(jī)的實(shí)際情況進(jìn)行分析,發(fā)現(xiàn)液壓缸高低調(diào)整和回轉(zhuǎn)距離的測量范圍分別為1097~1742 mm 和1530~2281 mm。基于以上情況,選用紅外線測距傳感器,具體型號為HD-DS200CM。該傳感器的測量范圍是1000~3000 mm,對應(yīng)的輸出電壓為0~5 V,檢測的靈敏度為0.025 V/mm。傳感器在工業(yè)中應(yīng)用比較廣泛,穩(wěn)定性較好,取得了較好的應(yīng)用效果。
2)智能經(jīng)緯儀。智能經(jīng)緯儀的檢測基本原理圖,如圖3 所示。檢測過程中,需要在掘進(jìn)機(jī)機(jī)身上安裝三個及以上的激光接收器,安裝時最好讓三個接收器呈等邊三角形對稱布置。在煤礦巷道上方,掘進(jìn)機(jī)后側(cè)位置安裝智能經(jīng)緯儀和檢測裝置,確保掘進(jìn)機(jī)與檢測裝置之間無遮擋。通過對激光的發(fā)射和反射,可以對三個接收器的具體位置進(jìn)行確定,而三點(diǎn)即可確定掘進(jìn)機(jī)的空間坐標(biāo)位置。本系統(tǒng)中利用6 個參數(shù)來描述掘進(jìn)機(jī)的姿態(tài),分別為繞X、Y、Z 軸的旋轉(zhuǎn)角度和在3 個方向上的位移。

圖3 智能經(jīng)緯儀的檢測原理圖
3)數(shù)據(jù)采集卡。在選擇數(shù)據(jù)采集卡時需要重點(diǎn)考慮四個方面的因素,分別為信息輸入的通道數(shù)量、輸入的范圍、分辨率以及數(shù)據(jù)讀取頻率。控制系統(tǒng)中共有10 組數(shù)據(jù)需要通過數(shù)據(jù)采集卡進(jìn)行采集,最大的信號輸入范圍為0~5 V。采集卡分辨率方面,目前常用的有12 位、14 位和16 位采集卡,其中位數(shù)越多意味著設(shè)備的分辨率越高,精度越高,所以本研究中選用16 位采集卡。綜合以上情況,最終選用型號為PCI-1742U 的數(shù)據(jù)采集卡。該型號采集卡具有非常高的采集頻率,為100 kHz~1 MHz,能夠完全滿足掘進(jìn)機(jī)自動截割控制系統(tǒng)的實(shí)際使用需要。
3.2 軟件部分設(shè)計
基于Labview 軟件進(jìn)行軟件程序開發(fā),為了將復(fù)雜的軟件部分簡單化,同時便于后續(xù)軟件的維護(hù),因此,軟件部分采用模塊化設(shè)計,即將整個軟件程序劃分為不同的模塊,然后對不同的模塊分別進(jìn)行設(shè)計。掘進(jìn)機(jī)自動截割控制系統(tǒng)軟件部分的模塊化框圖,如圖4 所示。用戶首先需要登錄管理模塊才能進(jìn)入并使用系統(tǒng),數(shù)據(jù)采集模塊與數(shù)據(jù)采集卡之間通過串口實(shí)現(xiàn)數(shù)據(jù)的讀取,軟件系統(tǒng)結(jié)構(gòu)內(nèi)部對數(shù)據(jù)進(jìn)行分析和處理后下達(dá)控制,傳輸?shù)紺OMPACTRIO控制驅(qū)動器中。

圖4 控制系統(tǒng)軟件部分框架
掘進(jìn)機(jī)自動截割控制系統(tǒng)的主要功能包括以下幾個方面:
1)使用者可以在系統(tǒng)中注冊并獲得管理員權(quán)限,擁有管理員權(quán)限的人可以對系統(tǒng)中的其他使用者進(jìn)行管理。
2)可以對數(shù)據(jù)采集卡中相關(guān)的數(shù)據(jù)信息進(jìn)行讀取,并將其保存和顯示。
3)對收集的數(shù)據(jù)進(jìn)行分析處理。
4)基于系統(tǒng)中設(shè)定的數(shù)據(jù)和采集到的數(shù)據(jù)信息,對截割路徑進(jìn)行自動規(guī)劃。
5)對以上功能2)、3)、4)中產(chǎn)生的數(shù)據(jù)進(jìn)行監(jiān)控,可隨時調(diào)取相關(guān)數(shù)據(jù)信息。
6)將控制系統(tǒng)輸出的指令轉(zhuǎn)化為模擬量信號。
7)確保計算機(jī)和COMPACTRIO 控制驅(qū)動器之間的可靠連接,并將指令下達(dá)到驅(qū)動器中。
掘進(jìn)機(jī)自動截割控制系統(tǒng)工作的主要流程圖,如下頁圖5 所示。
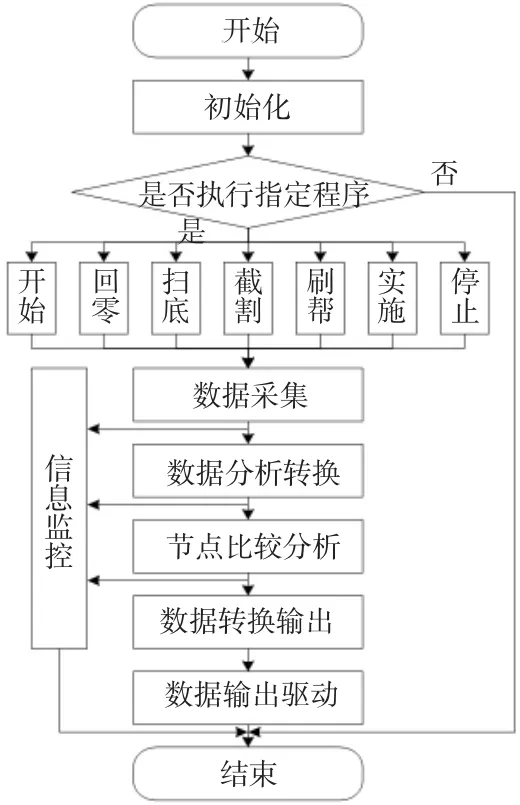
圖5 自動截割控制系統(tǒng)主要工作流程圖
4 自動截割控制系統(tǒng)的應(yīng)用
將以上設(shè)計的自動截割控制系統(tǒng)應(yīng)用到EBZ135 型懸臂式掘進(jìn)機(jī)中,并開展現(xiàn)場工業(yè)試驗(yàn)。試驗(yàn)的巷道為拱形巷道,其高度和寬度分別為3 m 和3.2 m。可以直接在控制面板中輸入巷道的規(guī)格尺寸并編輯有關(guān)參數(shù),自動截割的步距也可在系統(tǒng)中進(jìn)行設(shè)置,本案例中將其設(shè)置為500 mm。完成參數(shù)設(shè)置后摁下啟動按鈕,EBZ135 型懸臂式掘進(jìn)機(jī)能夠按照系統(tǒng)設(shè)定的要求,自動化地完成截割工作。整個實(shí)踐測試期間,控制系統(tǒng)運(yùn)行穩(wěn)定,沒有出現(xiàn)明顯的故障問題。經(jīng)過技術(shù)人員的初步分析,認(rèn)為自動截割控制系統(tǒng)的成功應(yīng)用,使掘進(jìn)機(jī)的工作效率提升了30%以上。另外,煤礦巷道斷面粗糙度和形狀得到了更好的保障,為煤礦企業(yè)創(chuàng)造了良好的經(jīng)濟(jì)效益。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
工業(yè)設(shè)計(2016年4期)2016-05-04 04:00:23
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:55:34
現(xiàn)代企業(yè)(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07