重載無人車的速度與方向控制方法
2022-07-09 01:24:26張子才
寶鋼技術 2022年2期
張子才
(寶山鋼鐵股份有限公司運輸部,上海 201999)
寶鋼股份公司寶山基地主要采用重型框架車進行鋼鐵在制品及產成品的物流運輸。隨著國內外車輛無人駕駛技術的逐漸成熟,框架車的無人駕駛技術研發也被提上議事日程。與轎車等輕型車輛的無人駕駛不同,框架車由于載重大、控制復雜,與轎車控制有較大不同。如轉向機構采用液壓控制,存在一定的滯后;行駛機構采用多電動機驅動,多電動機同步比較困難。本文根據重載框架車的特點,探討在無人駕駛時的速度與方向的控制方法。
1 速度控制
無人化框架車需要在執行任務的過程中保持一定的速度,在控制系統預先完成速度規劃后,需要一個合理的速度控制策略,以實現框架車的實際速度更好地跟隨該速度規劃曲線,在無人駕駛領域稱之為縱向控制。
傳統的縱向控制策略為PID控制[1]。本文在傳統PID的基礎上加以創新,使之更貼合項目的實際需要。項目中,電動機驅動力矩百分比和剎車制動力矩百分比(類似于有人駕駛自動檔車輛的油門和剎車,故以下簡稱“油門”和“剎車”),均對速度產生一定影響,故速度的控制需要同時考慮兩個控制量的輸出。油門量的給定通常影響到車輛加速和速度保持,而剎車量的給定通常影響到車輛的減速和停車過程。兩者互為排斥關系,即當油門給定時,不能給定剎車量;同理,當剎車量給定時,不能給定油門量。
本項目中,為解決油門量和剎車量相互耦合的問題,設計一個共用的PID控制器,如公式(1):
U[n]=Kp{e[n]-e[n-1]}+Kie[n]
(1)
式中:U[n]為當前油門或剎車量的輸出值,當U[n]>0時輸出的為油門值,當U[n]<0時,輸出的為剎車值;Kp為當前的PID控制中比例系數;Ki為PID控制中積分系數;e[n]為本周期中目標速度和當前速度的偏差值;e[n-1]為上一周期中目標速度和當前速度的偏差值。
采用增量式PID,且會根據每次任務的車輛載重,更新車輛的PID參數,即車輛載重越大,油門和剎車控制器的Kp值和Ki值越大。
在車輛控制的過程中,首先計算當前速度和目標速度的速度差,作為輸出量令油門控制器計算出油門給定量,如果是負值,則啟動剎車控制器進行控制計算。實際的框架車行駛過程中,過大的加速度和減速度均會招致車輛運輸物如鋼卷等發生滾動、脫落的危險,而且對車輛使用壽命不利。所以,車輛控制器的設計在最終輸出時,對油門量百分比和剎車量百分比的變化值作出了限制,即分別控制在一定的限幅區域(死區)內,避免車輛過快加速或減速帶來的風險。
車輛速度控制流程圖如圖1所示。
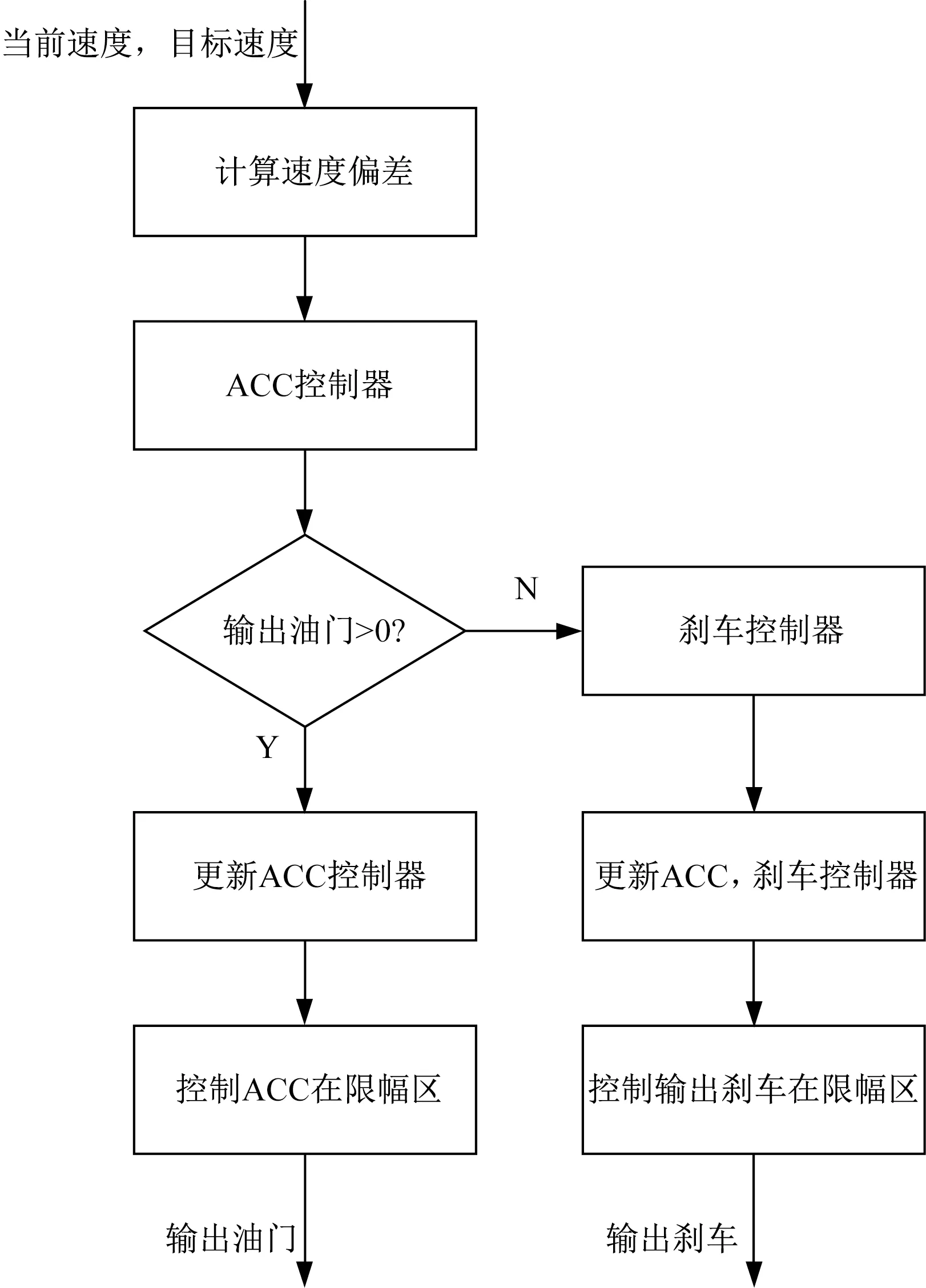
圖1 車輛速度控制流程Fig.1 Vehicle speed control process
圖2為車輛在直接下達高速行駛指令的高速段的速度追蹤效果,可以得知:車輛在速度追蹤到想要達到的目標速度后,由于PID積分效應的影響,會產生一定的超調,隨著時間的推進,速度會產生震蕩隨后達到穩態。這一現象符合PID調節的基本規律,合理地調整參數可以一定程度上減小超調并減小達到穩態所需要的時間。
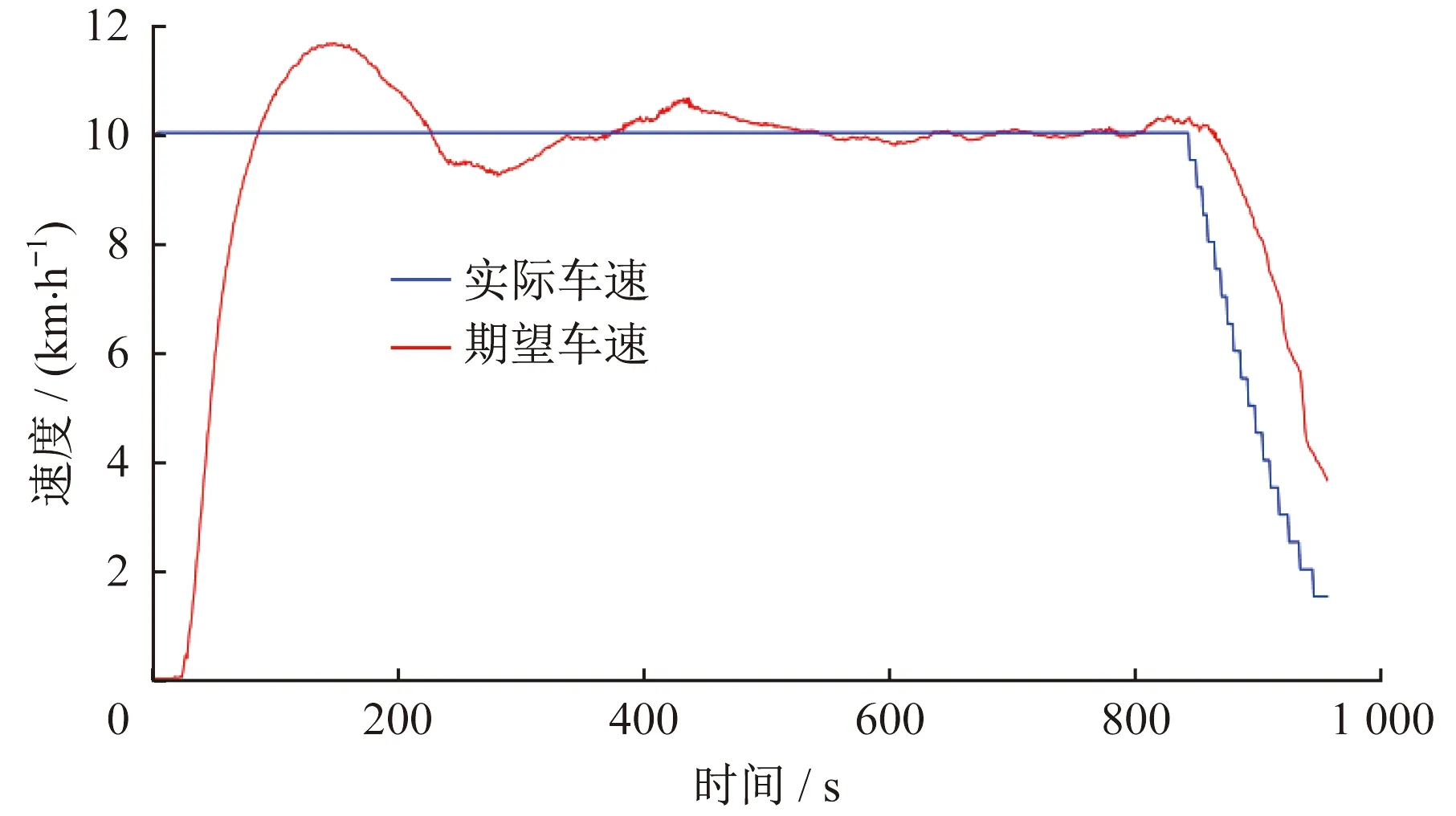
圖2 速度追蹤效果Fig.2 Speed tracking effect
圖3是在試驗路段的實際跟蹤效果,在速度控制上基本達到了人工駕駛開車的效果。

圖3 試驗路段速度測試結果Fig.3 Speed test results of experimental road
2 車輛尋跡控制
軌跡生成是各類無人車運動規劃算法的一個基本程序,其目的是構造狀態空間中的一條軌跡連接任意給定的兩個狀態[2]。無人化框架車收到任務指令時,可以沿著規劃系統所計算出的軌跡進行尋跡控制。車輛尋跡的過程中,需要不斷調整車輛的轉向角度以追上目標軌跡。由于車輛根據轉角大小尋跡的過程與曲線曲率、車輛速度等各個因素都有關,車輛尋跡是一個相對復雜的過程,本文采用單點預瞄偏差的PID控制來實現車輛尋跡控制。
基于誤差調節的路徑跟蹤控制系統相當于一個駕駛員模型,駕駛員模型是導航技術的重要組成部分。實際駕駛中駕駛員通常以當前車輛的運動狀態為基礎,預測當汽車行駛到前方視覺所及某處(即預瞄點)時車輛與期望道路中心線之間橫向位置誤差的大小,駕駛員轉動方向盤的目的就是盡可能使這個預測的誤差為 0,而不是著重于減小當前車輛中心與期望路徑之間橫向位置誤差。這個預測的誤差就被稱作橫向預瞄誤差。駕駛員根據橫向預瞄誤差的正負和大小來轉動方向盤調節前輪轉角,實現對車輛行駛路徑的調節。無人駕駛領域中,傳感器采集的信息被傳回車載計算機后,計算機根據車輛運動參數、道路曲率和單點預瞄模型計算出預瞄點處的橫向誤差,然后根據這個橫向誤差、車輛的運動狀態和車輛的動力學公式計算出所需的前后輪轉角,實現對目標路徑的跟蹤。
如圖4,以車輛中心點為坐標原點O,車輛中心線正前方為OX軸正方向,OX軸上的C點為預瞄點,Ls表示預瞄距離。
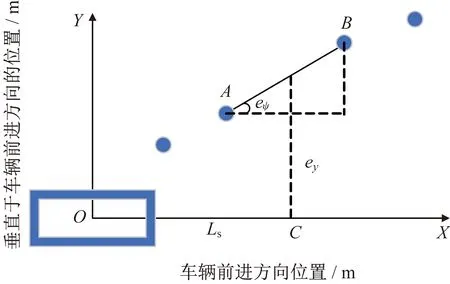
圖4 預瞄點與目標點的偏差 Fig.4 Deviation between preview point and target point
由于道路被規劃系統定義為一系列散點,故求預瞄點C與道路的距離偏差ey和角度偏差eψ,需要取預瞄點與距離最近的相鄰道路點A、B的插值。道路點A、B基于車輛坐標系轉化后的x,y坐標分別為(x1,y1),(x2,y2),可以求得:
(2)
角度偏差eψ可以直接視作預瞄點與道路前后兩相鄰點切線的夾角,可以用式(3)求出:
(3)
本文用復合PID來實現ey和eψ的糾偏,由于車輛輪胎的變化對偏航角的變化十分明顯,本項目中將角度偏差eψ的偏差影響P調整為一個相對微小的值,并刪除了角度PID中的積分項和微分項,同時刪除距離PID中的微分項,最終輸出車輛輪胎轉向角和ey、eψ之間的關系,見式(4):
(4)
式中:δ為車輛輪胎轉向角;Kp1為距離PID控制中的比例系數;Ti為積分時間;Kp2為角度PID控制中的比例系數。
實際應用中,由于車輛實際工況比較復雜,一套PID參數不能適應所有工況的需要,其中對于控制影響最大的兩個因素分別是速度和車輛的載重。本項目中,經過長時間對最優控制參數的摸索和調整,對于不同速度和不同載重的劃分,將速度和載重設計為不同分段,通過建表的方式記錄最優參數(表1)。在車輛執行任務的過程中,實時根據車輛速度和載重,讀取最優參數,并計算實時車輛輪胎轉向角。
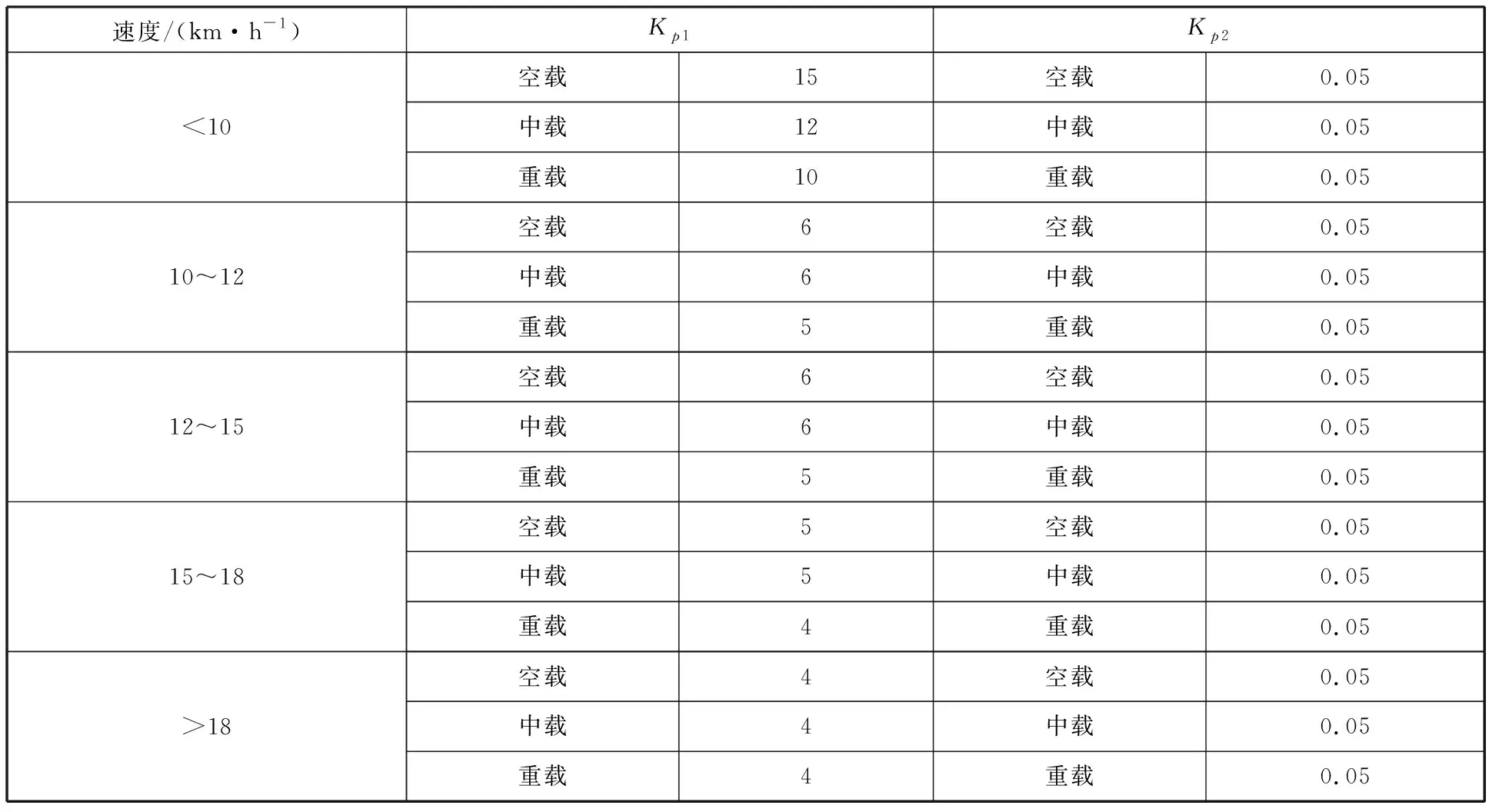
表1 方向控制最優參數表Table 1 Optimal parameters of directional control
在選取車輛預瞄點時,預瞄距離Ls同樣應受工況的影響而變化,本項目中預瞄距離隨車輛當前速度變化可以用多段線的關系表示,如圖5所示。

圖5 預瞄距離與速度的關系Fig.5 Relationship between preview distance and speed
重載無人車直線行駛,實測控制效果如圖6所示,偏差為一個較小較穩定的結果。
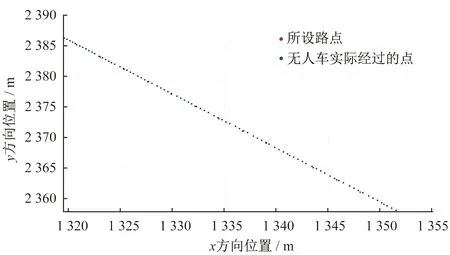
圖6 直線行駛尋跡控制效果Fig.6 Control effect of straight line driving trace
無人車彎道尋跡控制如圖7所示。采用上述介紹方法仍然能夠追上所設路點,可以證明該尋跡模型同樣適用于直線和轉彎的情況。
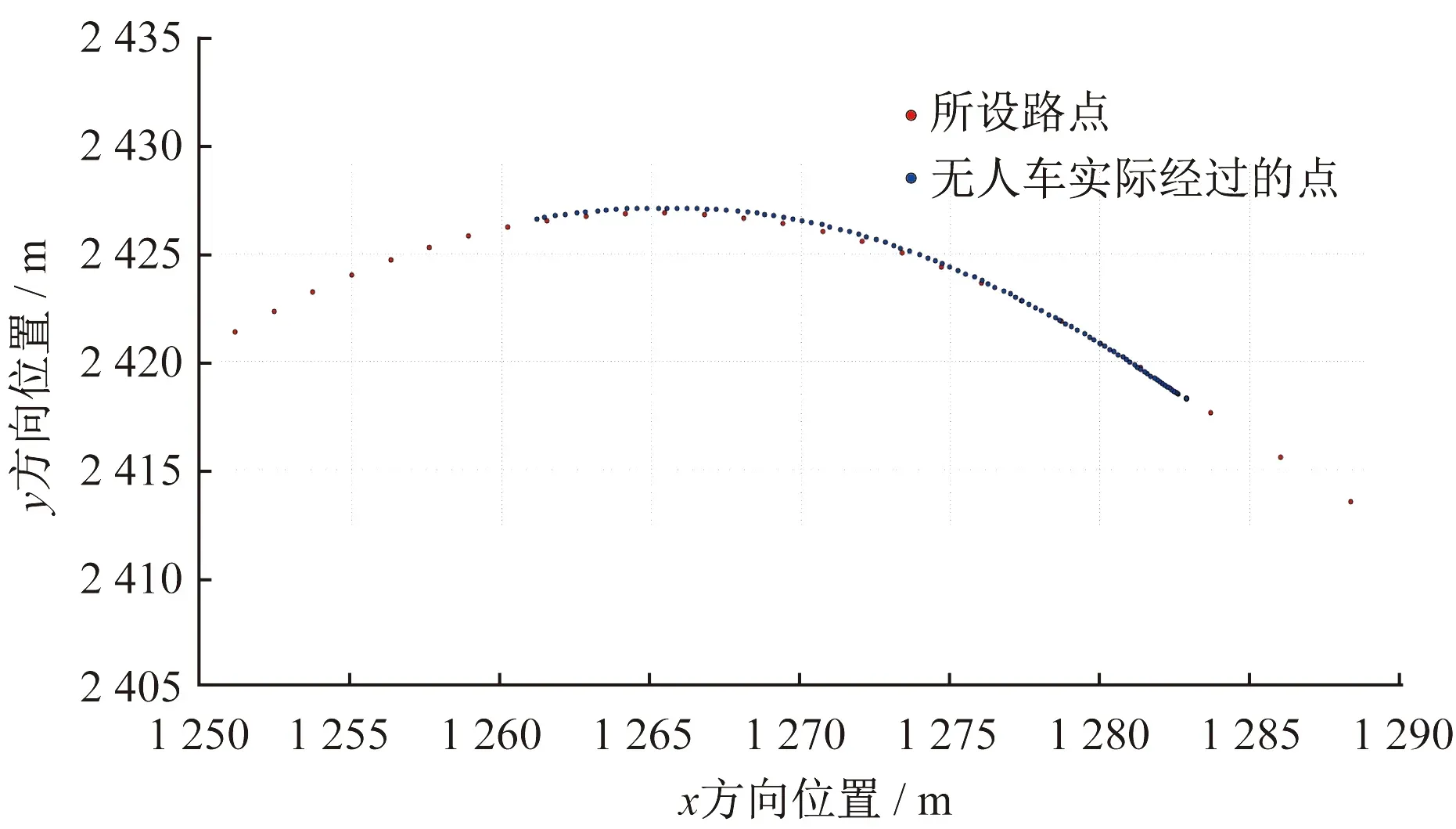
圖7 彎道行駛尋跡控制效果 Fig.7 Tracking control effect of curve driving
3 不同載重及速度下的控制效果
為了進一步驗證控制策略的魯棒性及對不同載重與速度的適應性,筆者進行了大量的實車測試驗證。如圖8中展示了不同載重(空載、中載、重載)且速度變化時的速度及軌跡跟隨效果(數據采樣頻率為0.2 s)。從圖8可以看出,在不同載重及速度下,實車均能較為穩定且快速地跟隨規劃速度與設定軌跡,從而進一步驗證了筆者所提控制策略的有效性和實用性。
4 結束語
重載無人車行駛中,在速度控制中采用增量式PID模型,在方向控制中采用復合式PID模型;同時根據車速和載重,實際反復測試,選取最優控制參數。通過這種方法,可以有效控制重載無人車在自動行駛過程中的速度和方向,自動駕駛控制效果與人工駕駛相似,滿足了實際工藝需求。通過在不同載重及不同速度下的多次實車測試,進一步驗證了所提控制策略的魯棒性和實用性。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
消費導刊(2018年10期)2018-08-20 02:57:02
中華詩詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
中國醫藥科學(2015年19期)2015-02-27 12:33:11
