
基于LED警示標志的橋區船舶誘導技術及實現
2022-07-11 08:47:28譚志榮屈文鵬陳國成張義軍明洋林
武漢理工大學學報(交通科學與工程版) 2022年3期
譚志榮 屈文鵬 陳國成 張義軍 明洋林
(武漢理工大學航運學院1) 武漢 430063) (內河航運技術湖北省重點實驗室2) 武漢 430063)
(湄洲灣引航站3) 莆田 351100) (長江航務管理局4) 武漢 430014)
0 引 言
當船舶航行至橋區時,容易發生撞橋事故,夜間能見度低,也會影響船舶航行安全.山區河段一般沒有布設景觀燈,橋區視線暗,加之駕駛員可視距離受山體、復雜通航條件等因素影響,給船舶航行帶來較大安全隱患.
在山區設置橋梁燈光引導系統,可有效提高船舶的通航安全,減少水上交通事故.郭辰等[1]研究了橋區燈光與船舶航行安全之間的關系,分析了南京長江二橋和蘇通長江大橋兼顧美觀與通航安全的燈光設計特點,提出了橋梁景觀燈的設計要點.
目前,針對光學引導的應用主要包括菲涅爾光學引導系統和艾科爾斯光學引導系統,使用LED光源引導登陸艇進艙[2-3].艾科爾斯光學引導系統是目前最先進的光學助降引導系統[4-5],該系統由用于遠程引導的激光助降系統及用于近程引導的常規光學助降系統組成,通過兩類助降系統的結合,可實現長達18 km的艦載機助降引導.李永娟等[6]針對艦船受海浪影響起伏對艦載機起落的高要求,基于應用最為廣泛的“菲涅爾”透鏡光學助降系統,采取一種基于小波變換算法的信號分析模塊,針對艦載機駕駛員對FLOLS光學引導信息感知的模糊特性建立了新型的光學助降系統.陳晨等[7]通過模糊控制理論建立了駕駛員感知模型,根據FLOLS得到高度偏差,向艦載機發出對應的控制指令.
LED在獲得大功率及更大亮度的同時,且尺寸小,被視為下一代照明的最佳潛在光源[8-9].二次光學設計是形成窄LED光束的主要方法之一.Allen等[10]設計用于LED均勻照明的自由曲面透鏡,系統顯示出均勻的照明,且發散半角為6°,效率為70%~92%[11-14].劉國強等[15]基于朗伯型光強分布特性,計算了自由曲面的反射部分的坐標,進行TIR曲面建模,仿真證明光能利用率可以達到90.6%以上.劉未華等[16]通過對LED與LD進行功率、定位的穩定性等方面分析了白光LED的準直性,結果表明白光LED功率穩、發熱少、適用于準直測量.
文中在考慮到山區河段橋梁燈光對船舶通航的引導作用的基礎上,兼顧節能減排的效果,結合大橋實例分析,利用LED光源設計輔助橋區助航的燈光引導系統.
1 視覺導航方法
目前,燈光助航大多采用環形燈,船員很難找到觀察亮點來確定航行路線,并且,橋區水域較短,船舶可能無法確定正確航路.使用不同顏色LED燈(紅色、黃綠色和藍色)劃分目標水域,并且設置黃綠色燈光慢閃,其余兩種顏色燈光快閃.每種顏色的光都通過特殊的方式限制在很小的發散角上.在船舶進入橋區水域之前,船員通過觀察這一水域燈光顏色判斷自己的位置,這種方法可以幫助船員夜間在橋區行駛時及時、準確找到正確的船舶航路,進一步保證了船舶的航行安全.
視覺導航流程見圖1.當船舶進入橋區水域之前,先會看到燈光覆蓋水域,值班船員觀察光線,不同顏色的光代表船舶在不同的航路.其中,黃綠色的光代表航向正確,紅色代表航向偏右,藍色代表航向偏左.在行駛過程中不斷觀察燈光顏色及閃爍頻率,以調整行駛方向并在進入橋區水域之前航行到正確的航路上.
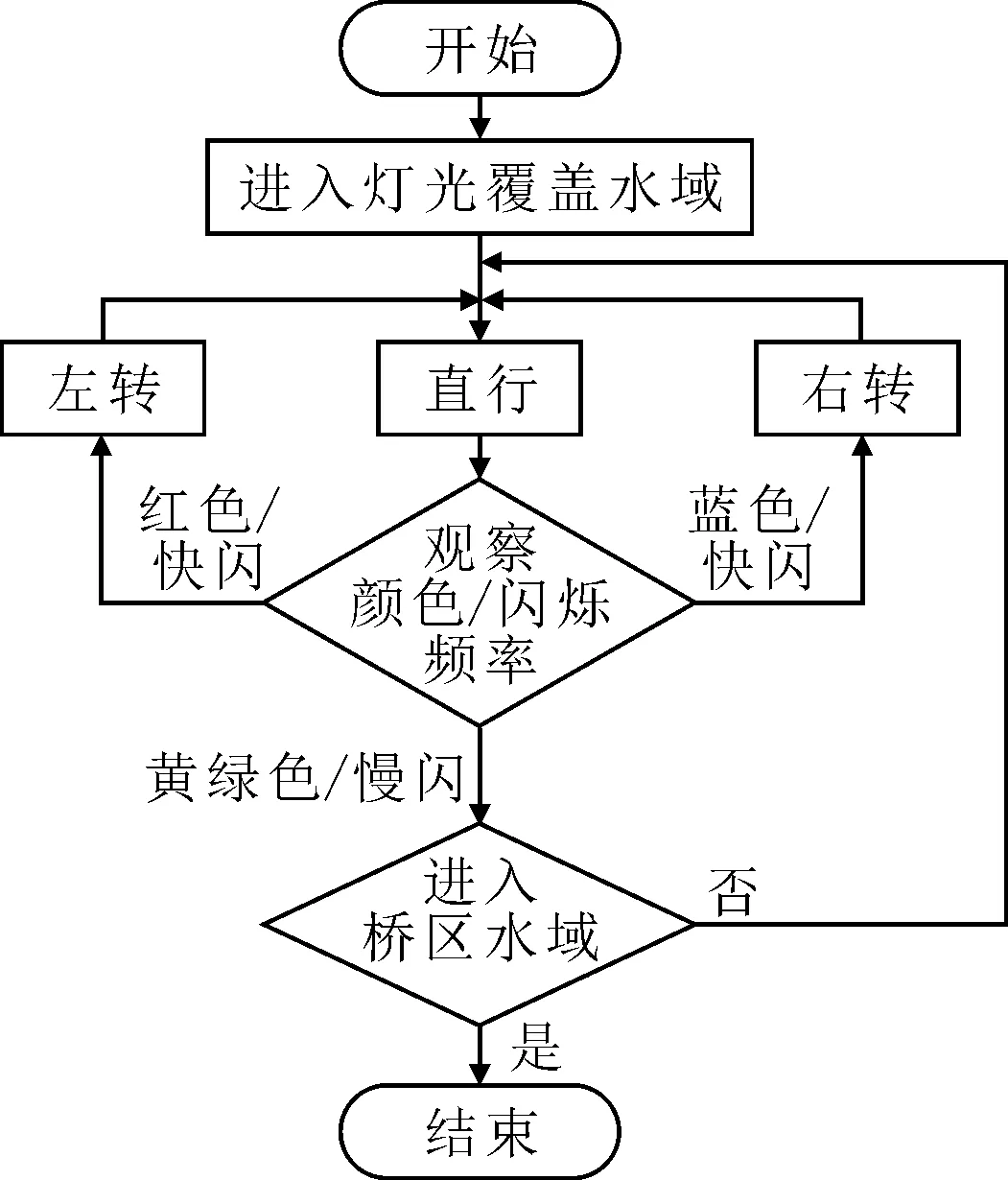
圖1 視覺導航流程圖
2 導航方案及光路設計
2.1 導航方案
此導航方案需要在橋梁通航孔上方安裝三個不同顏色的燈具,照亮進入橋區水域之前的一段水域,行駛在不同區域的船舶可觀察到不同顏色的引導燈光,以此來判斷航路是否最優.此導航方案的視覺示意圖見圖2.ABCD是一個平行四邊形,代表橋區水域.船舶向Q方向行駛,值班船員觀察前方水域,視覺導航系統位于橋梁通航孔Q上方的橋側面P點照射水面.照射區域EFGH,光線顏色為紅色,黃綠色和藍色.其中,夜間人眼最為敏感的黃綠色燈代表最佳行駛路線.紅色燈在最佳路線右側,藍色在左側,并且紅色及藍色燈光快閃、黃綠色燈光慢閃.通過觀察光顏色及閃爍頻率,船員可以判斷船舶正在哪個區域行駛,及時調整航向使他們能夠在進入橋區水域之前行駛到正確的航路,并且接下來根據橋區航標的指示,安全的通過橋區水域.

圖2 視覺示意圖
2.2 光路設計
為了保證行駛安全,安全通過橋區,船舶需要在進入橋區水域之前找到正確的船舶航路,因此需要光線引導船舶駛入橋區水域,依據導航方案可以確定導航系統的光斑形狀.為了滿足對進入橋區船舶的引航需求,需要垂直方向光束有一定的發散角,照亮較長距離光路.同時水平方向光束保持準直,以減少光束的漫反射.
根據對多數橋梁下水方向橋區航標的調查,選取距離橋梁1 400~2 000 m范圍作為設計燈光引導距離,同時選取合適的通航凈高18 m以及目標處光路寬度240 m作為設計標準,此時可以計算出理論上垂直方向光線的最大出射角度17.1°,水平方向上發散角不超過6.8°,此時的光學系統可以滿足設計要求.
3 光學系統
根據上述光路設計,考慮使用大功率LED、線性菲涅耳透鏡和矩形聚光鏡建立光學元件,形成光學系統,產生矩形光區域.光路圖見圖3.
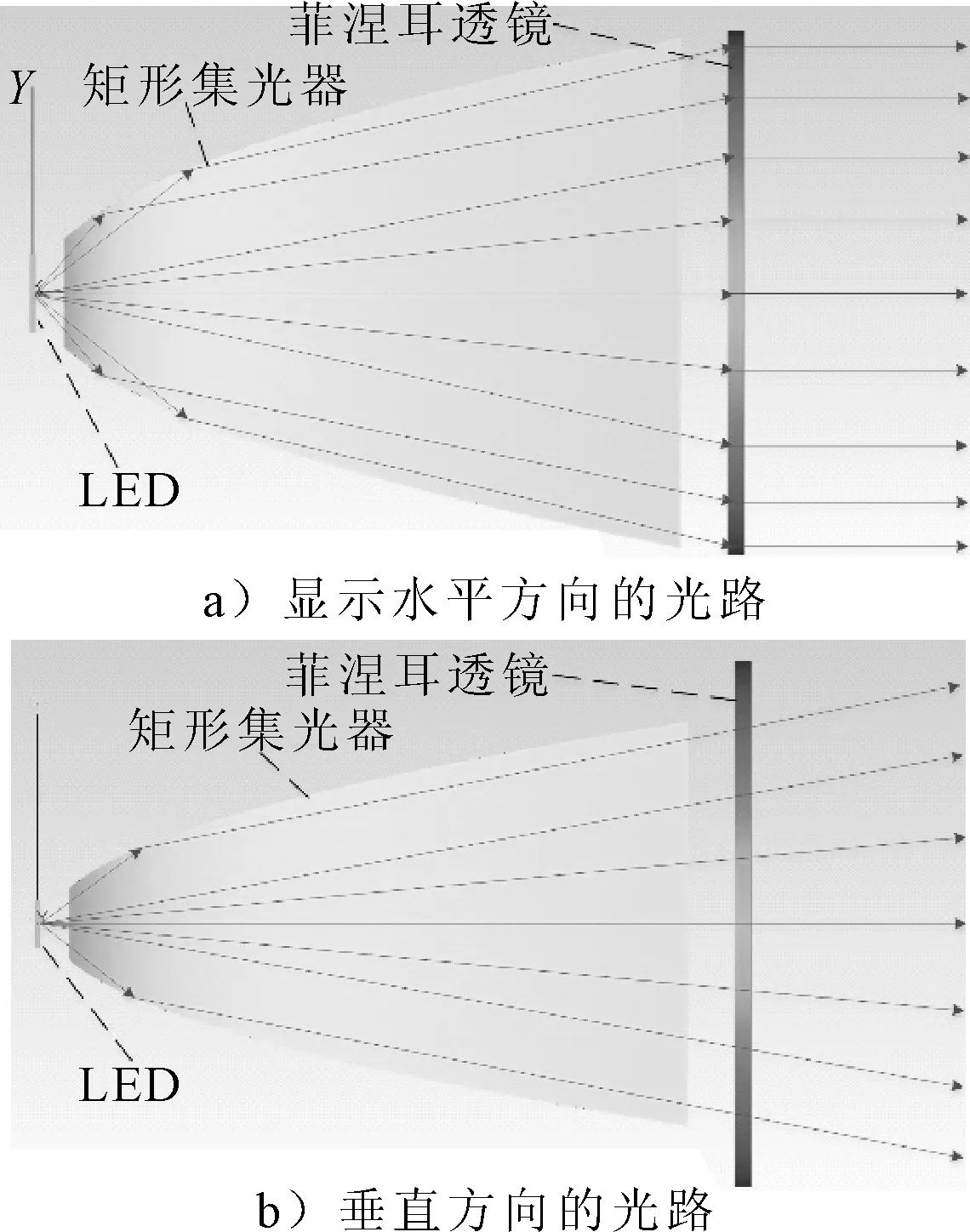
圖3 光學系統光路圖
矩形集光器由四個拋物面組成,兩個相對的拋物面具有相同的焦距,用來保證水平方向和垂直方向產生發散角度不同的均勻光線.內部矩形集光器上覆蓋有反射材料的內襯,菲涅耳透鏡可以把僅在水平方向上的發散光變為平行光.
LED光源發出發散角大的光束進入矩形集光器.光束穿過菲涅爾透鏡水平發散角角度變得比進入集光器之前小,光束可以近似為平行光.矩形區域具有大的長寬比,因為垂直發散角較大,使得光照區域近似為長距離的矩形區域,滿足導航方案的需求.
在參數設計時,LED光通量設為1 000 W,發光面積為20 mm×20 mm.菲涅爾透鏡尺寸為100 mm×150 mm,焦距300 mm.矩形集光器的兩個相對面的拋物線焦距分別為5和7 mm,深度為200 mm,設置接收面距離LED光源2 000 m.根據物理建模及參數設置,此光學元件的水平方向出射光線應為近似平行光,垂直方向光線最大出射角度應為17.1°.
為了驗證此光學元件的有效性,使用TracePro軟件構建并模擬了此光學系統.通過仿真結果及照度分析,驗證實際生成的矩形光斑范圍,以此判斷此系統的可行性.
仿真結果見圖4.光束清楚地在接收面上形成一個矩形亮光表面,中央條帶明亮,兩邊逐漸變暗,為了便于分析,減少雜散光等對照度圖的影響,對照度圖進行了平滑處置,因此矩形光斑邊緣雜散光點不清晰.

圖4 光照度曲線變化圖
圖4右側圖為左側圖中十字線位置處的水平方向及垂直方向光通量分布曲線,由圖4可知:①2 000 m處有效燈光寬度達到180 m;②2 000 m處有效燈光長度達到500 m.
根據設計光線最大出射角度17.1°,理論傳播距離最大為600 m;結合實際仿真結果光線有效照射長度約為500 m,因此此燈光系統在垂直方向上的實際有效發散角角度約為14.3°.
結合實際仿真結果光線接收面上水平方向的燈光寬度約為180 m,則實際此光學系統的橫向發散角約為5.2°,可以滿足水平方向設計光線為近似平行光束,最大出射角度不超過6.8°的設計要求.
考慮到雜散光、光線損失、邊緣范圍光通量不足等因素,水平方向、垂直方向上的光線發散角度均在合理范圍內,仿真結果表明此燈光引導系統可以實現1 500~2 000 m范圍內形成180 m×500 m的矩形光斑.
4 實例設計
以奉節長江公路大橋為例,根據上述實驗結果進行LED引導系統的設計.奉節長江公路大橋右岸上田至左岸十里村聯線,長江上游航道里程213.3 km處.奉節長江公路大橋屬于典型的山區橋梁、橋梁沒有布設景觀燈,橋區河段通航環境復雜,橋區水域上游,距離大橋約2 km處便是河口水域,船舶流量大.
以下水方向為例,奉節長江公路大橋下水方向橋區水域開端——夔門橋右#3距離奉節長江公路大橋約1 300 m.設計最高通航水位為175 m,通航凈空高度18 m.
經過仿真計算,在光通量不變的條件下此光學系統可以實現在1 500~2 000 m距離范圍內對船舶的清晰引導;其次,引導燈光的縱向發散角約為14.3°.考慮到此橋區水域通航環境較為復雜,并且夔門橋右#3橋區水域起始浮標距離橋梁較近,結合河口位置,確定此引導系統布設范圍見圖5.
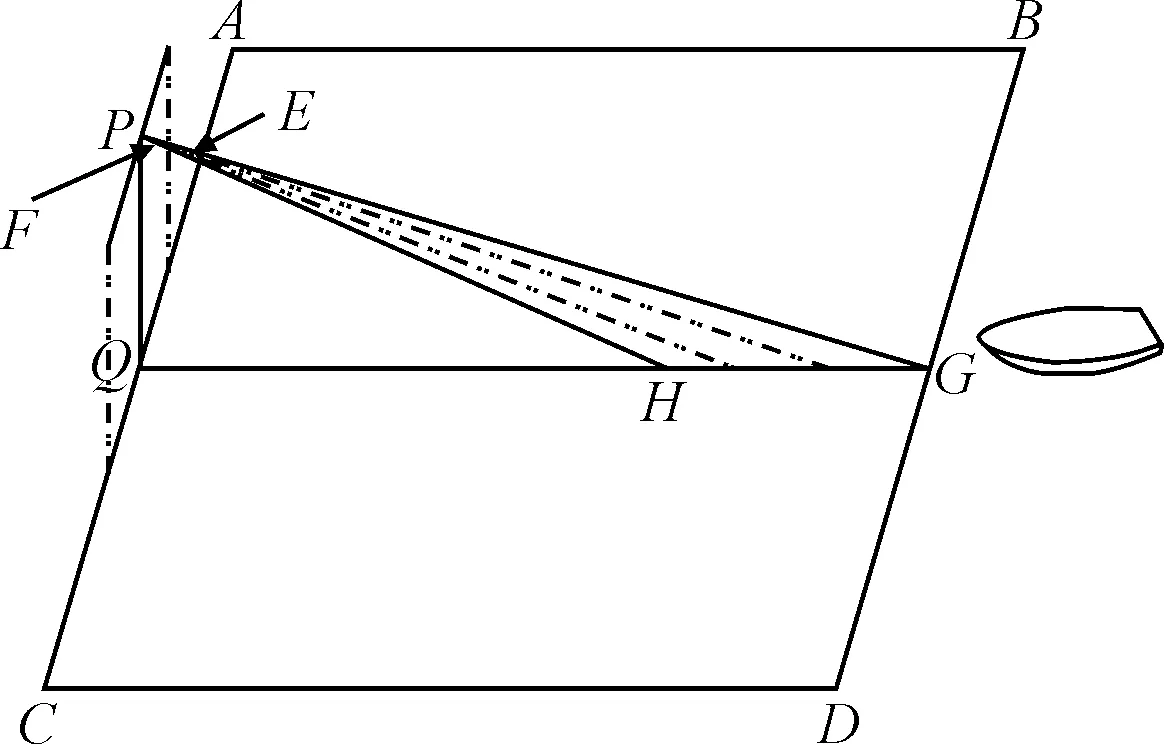
圖5 奉節長江公路大橋LED燈光布設距離示意圖
ABCD代表從上游河口到大橋之間的河段.QG長2 000 m,P點為橋梁通航孔最佳通過點,PQ距離18 m,LED燈光在垂直方向上發散角E為14.3°,根據三角函數公式計算得F為75°,即此引導系統布設時于垂直方向的夾角;在船舶進入橋區水域之前,在HG水域可觀察到引導燈光,船舶及時調整航向準確進入橋區水域,然后便可根據橋區水域航標指示安全通過橋區河段.此系統可以滿足通航船舶對于燈光引導的需求.
5 結 束 語
文中提出了使用不同顏色LED視覺導航方法.此方法基于不同顏色、閃爍頻率的燈光(紅色,黃綠色和藍色)以劃分目標水域.船員根據觀察到的燈光顏色確定位置和方向.進行了光學系統的建模和分析,通過模擬結果的實際發散角度,對比水平、垂直兩個方向的設計最大發散角度約為5.2°,光束水平發散角滿足設計要求.同時垂直發散角為14.3°,也滿足設計要求.確保了此引導系統可以完成1 500~2 000 m范圍內的光路照射,從而對于即將進入橋區水域的船舶進行提前引導.以奉節長江公路大橋進行了實例分析,通過數理分析評估了布設此光學引導系統的合理性.本系統的優勢在于布設成本小、難度低,同時又有較高的可靠性,小范圍的光線也不會造成燈光污染.
文中在進行物理建模之后,便采用Tracepro進行仿真,并沒有制造實物模型進行實船實驗.而且建模過程太過理想化,缺乏溫度、濕度等傳播介質對光線影響的思考,有待后續作進一步深入研究.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
船舶(2021年4期)2021-09-07 17:32:22
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
