環境減災二號A/B衛星多軸機動及對日對月姿態控制方法
2022-07-12 03:17:24李麗君莫鑫張屹峰張斌王淑一
航天器工程 2022年3期
李麗君 莫鑫 張屹峰 張斌 王淑一
(1 北京控制工程研究所 空間智能控制技術國家科技重點實驗室,北京 100094) (2 航天東方紅衛星有限公司,北京 100094)
環境減災二號A/B衛星每顆衛星有效載荷配置4臺16 m相機、1臺高光譜成像儀、1臺紅外相機和1臺大氣校正儀,采用高速數傳系統和450 M雙極化點波束天線,完成載荷數據的壓縮、存儲和對地傳輸。衛星具有多軸機動和對慣性目標定向需求,及滿足光學相機的標定及成像需求。空間相機在對地景物點成像過程中,由于衛星軌道運動、地球自轉和衛星姿態變化等的影響,相機圖像會產生移動,因此光學相機載荷工作時需要衛星具有偏流角修正功能[1-2]。
環境減災二號A/B衛星根據載荷特點,需要衛星控制分系統完成偏航90°及偏航90°、俯仰25°的在軌標定模式,這就需要衛星具備雙軸機動的能力,機動到位并穩定的時間為10 min,同時需要具備在雙軸機動過程中偏流角修正的功能。
月球作為地球的天然衛星,被認為是理想的定標源,利用月球進行衛星在軌定標是提高輻射定標效率,監測遙感衛星探測器成像穩定性的重要手段[3-4]。環境減災二號A/B衛星飛行期間,對月定標過程時間較短,此時可假定月球相對于慣性空間的位置不變,此時,衛星可通過三軸姿態的對慣性空間指向不變來實現對月定標的功能需求[5-6]。
本文提出了一種雙軸機動控制方法,在原有單軸機動能力的基礎上實現了雙軸機動,并在雙軸機動時考慮了偏流角的修正算法,實現衛星雙軸機動的同時具備偏流角修正能力。衛星具備沿歐拉轉軸的一次機動,完成對慣性目標定向功能,同時具備沿某軸的勻速掃描功能,實現載荷對日和對月的定標功能[5-6]。
1 衛星動力學
衛星帶有兩塊太陽翼,衛星的姿態運動學方程為[7]
(1)
式中:qv為姿態四元數的矢量部分;q4為姿態四元數的標量部分;ω為星體的姿態角速度。
描述星體轉動與撓性附件振動的衛星姿態動力學方程為
(2)
式中:J∈R3×3為星體轉動慣量,是正定對稱陣;η∈Rn為撓性模態坐標,n為撓性模態階數;τ∈R3為執行機構施加在中心體上的力矩;F∈R3×n為撓性耦合系數陣;Ω∈Rn×n為對角形式的撓性模態頻率陣;ξ為撓性模態阻尼系數,一般取0.005。
2 姿態機動控制律
衛星的姿態機動過程通過軌跡規劃,使得姿態和角速度跟蹤規劃的姿態和角速度曲線[8-9]。設qr和ωr是衛星的目標四元數和目標角速度,q為衛星當前的姿態四元數,則可以得到誤差四元數為qe=qr-1?q,角速度誤差ωerr=ω-A(qe)ωr,衛星動力學方程為
(3)
式中:A(·)為采用四元數的姿態轉換陣。
設計姿態控制律為
τf=-2Kpqevsgn(qe4)-Kdωerr
(4)
式中:τf為控制力矩;控制參數Kp和Kd分別為比例微分系數陣,一般選擇為對角陣形式;sgn(·)為符號函數,即為

(5)
2.1 多軸機動
環境減災二號A/B衛星是基于CAST2000平臺的小衛星,平臺現有的機動能力為采用歐拉角方式實現的單軸機動,為了滿足衛星的雙軸機動載荷定標要求,設計了采用姿態四元數的機動控制方式,可以實現任意單軸和多軸機動。衛星具備對日對月定標的功能,注入目標姿態后可以通過繞歐拉軸的一次旋轉機動到位,再根據任務需要是否掃過月球,從而決定是否在慣性定向期間是否需要衛星勻角速度運動。
多軸機動與慣性目標定向不同,目標姿態需要轉換到軌道系下,實現在軌道系下的姿態保持。
采用312轉序,則姿態轉換矩陣
Cbo=R312(φrx,φry,φrz)
(6)
式中:φrx,φry,φrz為姿態機動的目標姿態;R312為312轉序的姿態轉換矩陣[4]。
環境減災二號A/B衛星要求俯仰偏航雙軸機動,本文設計的控制律可以實現任意三軸的姿態機動控制。由于衛星帶有光學相機,因此對于多軸機動時偏流角的補償算法需要考慮。
由于地球自轉的影響,相機在對地物點成像時,在衛星軌道運動、地球自轉以及衛星姿態變化的影響下,相機的視軸與地物點有相對速度不沿衛星縱軸方向,而存在橫軸分量。因此,需要設置偏流角補償,使得地物點相對衛星的速度沿衛星縱軸方向。
目標點相對于相機鏡頭(本體坐標系)的速度可以表示為
v=ωe×R-(vs+ωri×rs)
(7)
式中:ωe是地球自轉角速度矢量;R是地心到目標點的矢量;vs是衛星運動速度;ωri是衛星在參考坐標系下的目標慣性角速度矢量;rs是衛星質心到目標點的距離矢量。
則偏流角
(8)
在計算偏流角時,需要將矢量投影在目標參考坐標系下進行運算,φrx、φry、φrz為姿態機動的目標姿態,姿態轉序采用312轉序,則軌道系到目標參考系的轉換矩陣為[10]
Cmo=CzT(φrz)Cy(φry)Cx(φrx)Cz(φrz)
(9)
式中:Cz(·)、Cy(·)、Cx(·)分別為繞X軸、Y軸、Z軸的旋轉矩陣。
2.2 慣性目標定向
將慣性目標定向模式分成“機動到對慣性目標”、“對慣性目標定向”、“機動回對地”3個子階段,根據時間自主切換,具體時間歷程如圖1、圖2所示。T0時刻發送“運行對慣性目標定向”指令。
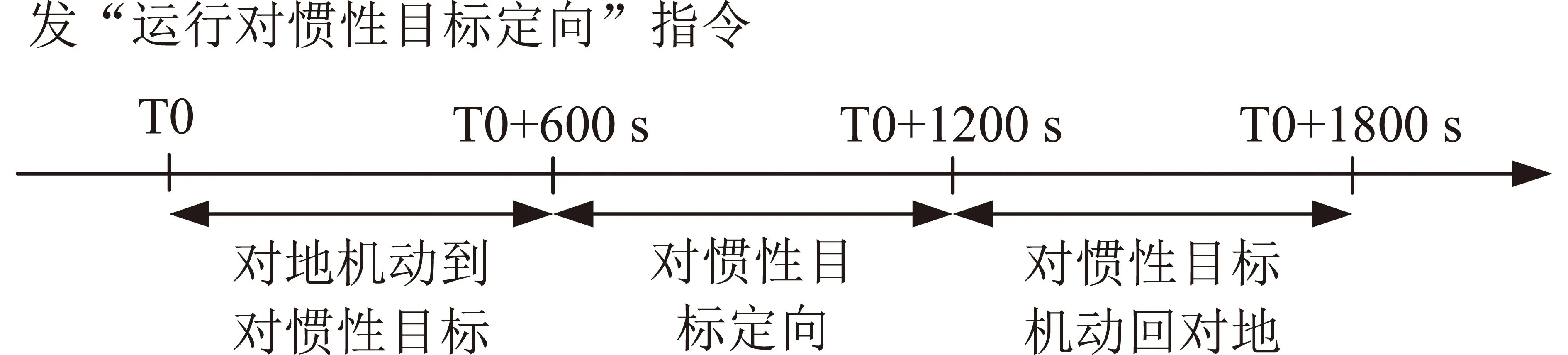
圖1 慣性目標定向模式時間歷程圖Fig.1 Inertial orientation mode

圖2 慣性目標定向子階段時間歷程圖Fig.2 Inertial orientation submode
3 數學仿真
3.1 多軸機動仿真
雙軸機動角度分別為φry=-25°,φrz=-90°。仿真結果如圖3所示。
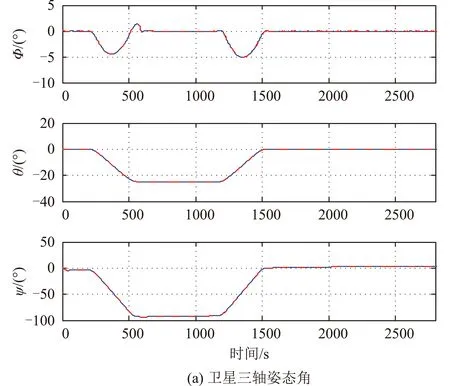

圖3 雙軸機動姿態曲線Fig.3 Double-axis attitude maneuver curves
3.2 對慣性目標定向數學仿真
對月定標仿真,模擬衛星對月慣性定向過程。地面注入目標四元數qTI=[-0.698 388,0.221 79,-0.663 444,0.151 342]T,仿真結果如圖4所示。

圖4 對月定標姿態曲線Fig.4 Attitude of orientation to the moon
對月慣性定向,同時繞X軸起速度掃過月球。仿真條件:600 s開始對月機動,1080 s機動到位,1080 s開始繞X軸0.1(°)/s機動,1680 s后開始機動返回對地姿態。定標過程中衛星四元數及角速度曲線如圖5所示,定標期間+Z軸與月球的夾角如圖6所示。1080 s時,+Z軸掃過月球。


圖5 對月定標姿態曲線(滾動軸角速度0.1(°)/s)Fig.5 Attitude of orientation to the moon(angular velocity in roll axis 0.1(°)/s)

圖6 +Z軸與月球方向夾角隨時間變化曲線Fig.6 Angle of +Z axis and orientation of the moon
對日定標仿真,對日慣性目標為qTI=[0.002 259,-0.632 458,-0.309 909,0.709 893]T,120 s開始對日機動,600 s機動到位,開始對日定標,2 min后開始返回對地姿態。定標姿態:衛星+Z軸、-Y軸、+X軸與星日連線夾角分別為35°、55°和90°,保持慣性姿態指向2 min。對日定標期間衛星的姿態四元數如圖7所示,定標期間+Z軸與太陽矢量的夾角如圖8所示。可以看出,衛星三軸姿態安裝預定的指向完成對日定標。
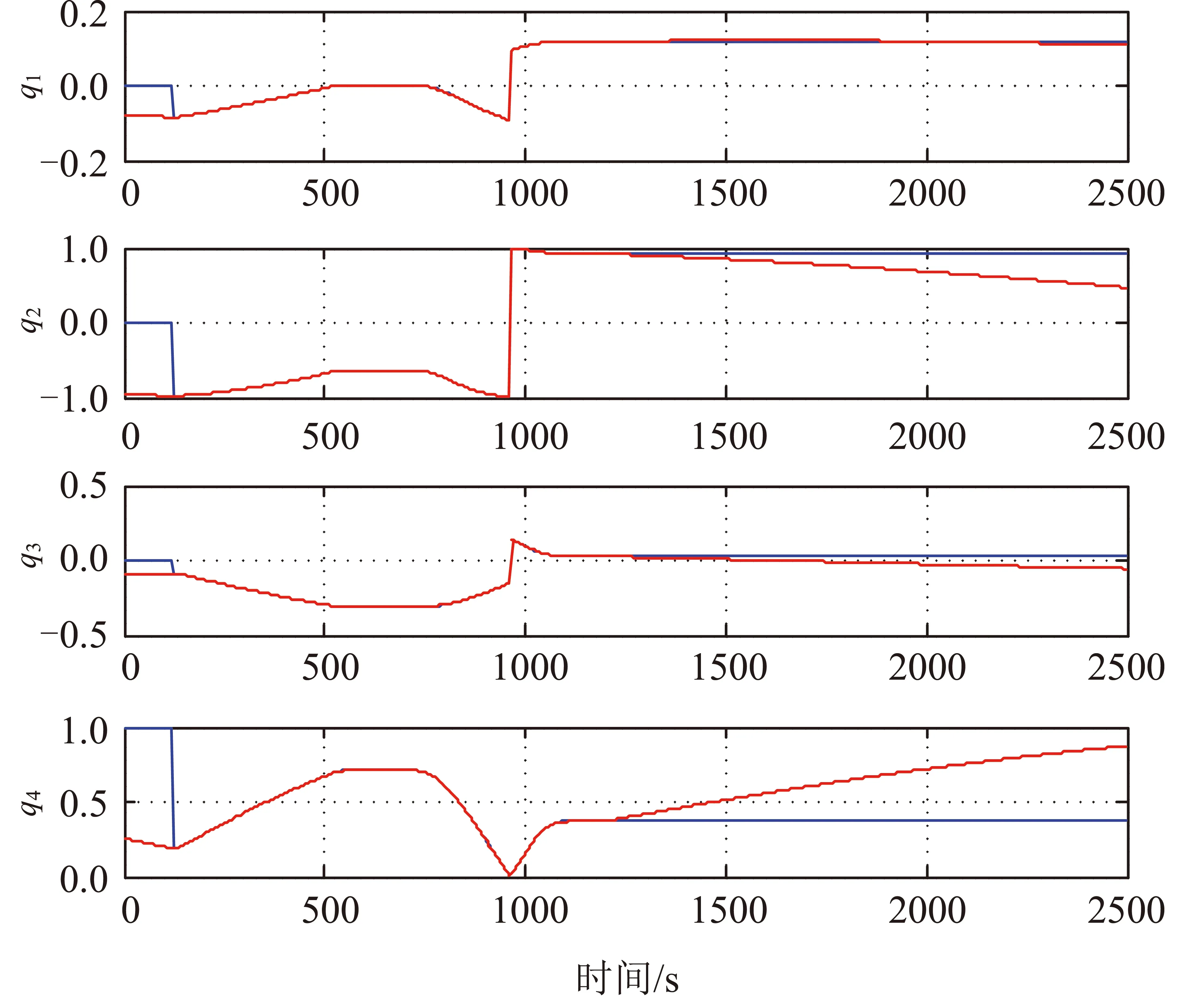
圖7 對日定標姿態曲線Fig.7 Attitude of orientation to the sun

圖8 對日定標過程中衛星到太陽矢量與星體三軸的夾角Fig.8 Angles of sun vector and three axis of satellite
2021年3月19日環境減災二號A星在軌進行了對月定標,規劃目標姿態及在軌實現情況如表1所示。可以看出,衛星在指定的時間完成了姿態機動,衛星實際四元數與規劃的四元數相差很小,誤差約0.006°,指標要求為0.1°,滿足指標要求。
環境減災二號A/B衛星在軌進行了多次對月、對日定標,定標過程中滿足相機對月、對日成像的姿態指向條件,定標期間姿態穩定度滿足對月成像的要求。

表1 對月定標規劃及實現數據Table 1 Planning of orientation to the moon and in orbit date
4 結束語
環境減災二號A/B衛星控制分系統在CAST2000小衛星平臺的基礎上實現了雙軸機動和對日對月定標功能。衛星具備任意兩軸同時機動的能力,本文分析了在312轉序下實現多軸機動時的偏流角補償算法,可以實現衛星考慮偏流角情況下的在偏航機動的同時繞俯仰軸的姿態機動定標功能。衛星同時具備對慣性目標定向的能力。對月定標期間,衛星的+Z軸始終指向月球,或在某軸以一定速度勻速掃過月球,從而實現對月球的成像定標功能。衛星對日定標期間,要求衛星+Z軸、-Y軸、+X軸與星日連線夾角分別為35°、55°和90°,保持慣性姿態指向2 min,計算出在定標時刻太陽的慣性指向,通過衛星對慣性目標定向的功能,實現衛星對日姿態并保持,從而實現對日定標。衛星的多軸機動和對慣性目標定向功能,為星上載荷提供了多種定標方式,拓展了對地觀測衛星的觀測對象,較傳統小衛星平臺業務能力得到提升,更好地滿足了用戶的需求。
