NIKON NSR 步進重復光刻機對準原理及典型故障修復
2022-07-13 05:48:16李遠林
電子工業(yè)專用設(shè)備 2022年1期
關(guān)鍵詞:檢測
申 強,劉 磊,曹 鑫,李遠林
( 中國電子科技集團公司第五十五研究所, 江蘇 南京210016)
在半導體芯片生產(chǎn)制造過程中,光刻工藝被認為是最關(guān)鍵的步驟,其決定了所生產(chǎn)半導體器件能夠達到的極限尺寸,即分辨率。一片硅圓片,在整個前道生產(chǎn)流程中,要經(jīng)歷多次曝光工藝。從截面來看,整個圓片是逐層的,層與層之間,在水平方向,又有著嚴格的位置關(guān)系,即套準容差。
光刻工藝所能達到的技術(shù)水平,主要是由投入生產(chǎn)的光刻機決定。光刻機使用的曝光光源,主要決定了所能實現(xiàn)的分辨率;而光刻機的對準系統(tǒng),就決定了不同層曝光工藝的套準精度。不同廠家,不同型號的光刻機,對準系統(tǒng)的工作原理大致相近,最終都是實現(xiàn)掩模版與圓片之間特定標記的對準。本文以NIKON NSR 步進重復光刻機為參考,論述了對準系統(tǒng)工作原理,包括掩模版對準和圓片對準,并列舉了常見的對準方面的設(shè)備故障及解決方法。
1 對準流程
NIKON NSR 步進重復光刻機采用的是分開對準的方式,先進行掩模版對準,后進行圓片對準(如圖1 所示)。曝光工藝開始后,掩模版被傳送至預對準模塊,對掩模版的X、Y、θ 方向進行初步校正。被傳送至承版臺上后,開始進行掩模版精對準和掩模版對準檢測,最終確定掩模版相對于承片臺坐標系的坐標。掩模版對準流程全部完成后,圓片在傳輸模塊找到平邊后,被傳送至承片臺上,根據(jù)程序內(nèi)設(shè)定的對準方式,完成圓片對準。承片臺和承版臺坐標系之間的關(guān)系以及機臺內(nèi)保存的機器常數(shù),最終確定掩模版和圓片之間的位置關(guān)系,進行曝光工藝。圖1 流程內(nèi)的“工件臺重置”和“基線檢查”,可以理解為執(zhí)行對準動作前的準備工作,本文不做詳細論述。

圖1 光刻機對準流程圖
2 對準系統(tǒng)結(jié)構(gòu)和原理
了解對準系統(tǒng)的結(jié)構(gòu)排布,對掌握其工作原理有較大的幫助。同時,對解決設(shè)備運行過程中產(chǎn)生的對準方面的故障的排查和處置也有較大指導意義。其中,最難理解的就是對準的光路系統(tǒng),圖2 顯示了整個對準流程中的主要光路傳播路徑以及所使用的光學元器件。
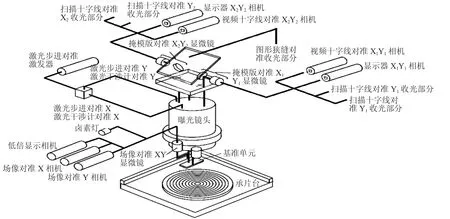
圖2 對準光學系統(tǒng)示意圖
基準單元(Fiducial Mark),是一個包含多種標記(LSA、FIA、SRA、VRA、ISS 等)的集合體,固定于承片臺上。作為對準媒介,在NIKON NSR 步進重復光刻機對準過程中起到了至關(guān)重要的作用[1]。基準單元在承片臺坐標系內(nèi)有一個特定的坐標。通過掩模版對準,建立了掩模版與基準單元內(nèi)相應標記的位置關(guān)系,而通過圓片對準,又建立了圓片與基準單元內(nèi)相應標記的位置關(guān)系。如此,就可以確立掩模版與圓片之間的位置關(guān)系。
2.1 掩模版對準
在單個曝光工藝過程中,掩模版對準包含搜索對準和精對準兩個過程,由于兩者使用的光路器件和對準原理相同,因此本文中統(tǒng)稱為掩模版對準。
掩模版對準采用的是掃描十字線對準方式(Scanning Reticle Alignment,SRA)。根據(jù)系統(tǒng)參數(shù),承片臺移動,使基準單元內(nèi)的掩模版標記處于特定的位置。從汞燈分支過來的一路光,從基準單元的下方往上發(fā)出,分為X1Y1和X2Y2兩路光,穿過曝光鏡頭后打在掩模版左右兩側(cè)的十字標記附近。光透過掩模版后被掩模版對準顯微鏡接收,分別通過單向濾光狹縫,生成X 或Y 方向的光,最后被對應的十字線對準傳感器接收(見圖2)。掃描十字線對準傳感器是光電倍增管,接收到光后,由高壓包對4 支分路(X1/Y1/X2/Y2)提供瞬時400 V左右的高壓,將光信號轉(zhuǎn)換成電信號。
在對準過程中,承片臺到位后不再移動,承版臺沿X/Y 向微動掃描(如圖3 所示)。由于掩模版兩側(cè)的鍍鉻十字標記不透光,在承版臺移動的過程中,十字線對準傳感器所接收到的光強會產(chǎn)生由強到弱再到強的明暗變化,當處于某一特定位置時,剛好完全擋住從下方標記發(fā)出的光而導致傳感器所接收到的光信號最弱的時候,認為此處為對準位置。根據(jù)讀取到的當前承版臺激光干涉計,可以確定掩模版對準時處于承版臺坐標系內(nèi)的坐標。

圖3 溫區(qū)閉環(huán)控制原理圖

圖3 掃描十字線對準原理圖
2.2 掩模版對準檢測
掩模版對準完成后,后續(xù)會進行掩模版對準檢測,包括視頻十字線對準檢測(Video Reticle Alignment Check,VRA) 和圖形狹縫檢測(Image Slit Check,ISS),其主要作用是檢查掩模版對準結(jié)果,形成閉環(huán),并確立掩模版在承片臺坐標系內(nèi)的坐標。
2.2.1 視頻十字線對準檢測
圖4 所示為該檢測方法的光路和原理,使用圖形識別技術(shù),掩模版對準完成后,承版臺保持不動,根據(jù)系統(tǒng)內(nèi)保存的參數(shù),移動承片臺,使基準單元內(nèi)的視頻十字線對準標記處于正確的位置。汞燈光從基準單元下方向上發(fā)出,穿過曝光鏡頭后,通過對焦功能,將基準單元上的視頻十字線對準標記投影在掩模版下表面,再透過掩模版后由對準顯微鏡傳送至視頻十字線對準相機。通過對比掩模版標記中心和基準標記中心之間的位置關(guān)系,計算出前者相對于后者的偏移量和旋轉(zhuǎn)量。在執(zhí)行曝光之前,會對位置偏移和旋轉(zhuǎn)進行校正,實現(xiàn)精確套準。

圖4 視頻十字線對準檢測原理圖
2.2.2 圖形狹縫檢測
圖形狹縫檢測原理如圖5 所示,該標記是分為X 和Y 方向的狹縫,汞燈光從包含圖形狹縫檢測標記的基準單元下方向上發(fā)出,形成狹縫光束,穿過曝光鏡頭后并放大,聚焦后投影在掩模版下方,臨近掩模版鍍鉻十字標記。掩模版保持不動,承片臺在此位置附近微動掃描,當光打在掩模版透明區(qū)域時,傳感器接收到的光最多,信號最強,而在承片臺掃描過程中,當狹縫光束完全被鍍鉻標記擋住時,傳感器接收到的光最少,信號最弱,認為對準。因此傳感器上會產(chǎn)生由強到弱再到強的光電信號,通過讀取到的當前承片臺激光干涉計,可以計算出掩模版標記在承片臺坐標系內(nèi)的坐標。

圖5 圖形狹縫檢測原理圖
2.3 圓片對準
圓片對準包括激光步進對準(Laser Step Alignment,LSA)、場像對準(Field Image Alignment,F(xiàn)IA)和激光干涉計對準(Laser Interferometer Alignment,LIA)三種對準方式。由于最后一種對準方式是選配功能,大部分機臺并不配置相關(guān)元器件,因此本文不做論述。
2.3.1 激光步進對準
激光步進對準光路和原理如圖6 所示,采用暗場下的激光衍射技術(shù)[2]。承片臺移動至標記位置,從He-Ne 激光器發(fā)出的相干光,波長為633 nm,被叉分成X/Y 方向,穿過光路鏡組和曝光鏡頭后形成狹縫打在圓片標記附近,圓片標記是由間隔數(shù)微米至數(shù)十微米的方形凸起陣列組成。承片臺在此位置附近微動掃描,當激光掃過圓片標記時,由狹縫原理產(chǎn)生光的衍射現(xiàn)象,入射光被分解成0、±1、±2、±3……級光。衍射光和散射光沿原入射光的光路返回,經(jīng)過反光鏡和濾光鏡后,包含位置信息的±1 級光被傳感器接收。在掃描的過程中,激光狹縫通過單排標記時,會產(chǎn)生由弱到強再到弱的衍射光,電路系統(tǒng)會接收到同樣變化的單峰信號。根據(jù)標記排布,會產(chǎn)生多個重復的單峰信號。如果標記衍射光與入射光相關(guān)聯(lián),那么此時產(chǎn)生的單峰信號即為標記對準信號。通過讀取激光干涉計,系統(tǒng)記錄下當前的承片臺位置坐標。

圖6 激光步進對準原理圖
2.3.2 場像對準
場像對準使用的是離軸圖形識別技術(shù),如圖7 所示,承片臺移動至對準標記剛好位于圓片場像對準顯微鏡下方的位置,從鹵素燈叉分的一路光源,通過曝光鏡頭外部的光路,打在標記上,反射后被場像對準顯微鏡捕捉到,最終傳送到場像對準相機。安置于對準顯微鏡內(nèi)的指引標記,被LED 光源照亮,同時被傳送至場像對準顯微鏡,共同產(chǎn)生對應的視頻模擬信號。系統(tǒng)自動對比圓片上場像對準標記和指引標記的中心坐標偏差,計算出水平方向上的偏移和旋轉(zhuǎn),從而計算出圓片標記在承片臺坐標系中的坐標。

圖7 場像對準原理圖
激光步進對準采用激光照明方式,光線在襯底和光刻膠之間多次反射產(chǎn)生標記附近的相干條紋,易錯誤反應標記的位置,得到虛假的對準信號。尤其是在金屬濺射層上,表面較粗糙且標記易產(chǎn)生不對稱變化,對準效果較差。場像對準采用了寬頻非相干的鹵素燈作為光源,明場成像[2],能夠減少金屬層上因為對準標記的非對稱性引起的對位錯誤,但是作為一種圖像處理方法,其缺點是不能很好地檢測到對比度較低下的對準標記[3]。因此,在實際曝光生產(chǎn)中,要根據(jù)圓片當前曝光層表面狀況,選取合適的圓片對準方式。
3 典型故障修復
本文主要針對NIKON NSR i11/i12 步進重復光刻機,對掩模版對準和圓片對準故障和異常進行了統(tǒng)計歸納,并列舉了可能的原因以及相應的處理方法,如表1 所示。

表1 對準常見故障及處理方法
4 結(jié)束語
NIKON NSR 步進重復光刻機對準系統(tǒng)結(jié)構(gòu)復雜,包括機械系統(tǒng)、控制系統(tǒng)、光學系統(tǒng)以及光電信號處理系統(tǒng)。本文通過對對準系統(tǒng)工作原理的簡要論述,結(jié)合實際工作,提出了易出現(xiàn)的對準方面的設(shè)備故障,并列舉了可能的產(chǎn)生原因以及解決方法。為相關(guān)設(shè)備出現(xiàn)類似故障時的快速修復提供了一定的技術(shù)指導。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48