
采用ELM和優化電壓傳感器布局的光伏陣列故障檢測與區域定位
2022-07-13 07:52:12王濤林培杰周海芳程樹英陳志聰吳麗君
福州大學學報(自然科學版) 2022年4期
王濤, 林培杰, 周海芳, 程樹英, 陳志聰, 吳麗君
(福州大學物理與信息工程學院,微納器件與太陽能電池研究所,福建 福州 350108)
0 引言
近年來,隨著溫室效應等環境問題的日益突出,以及煤炭等不可再生資源的日漸枯竭,作為太陽能開發的主要方式,光伏并網發電受到了人們的普遍重視[1]. 一般來說,光伏組件的理論使用壽命為20~30 a[2]. 這就要求光伏電站在這二三十年的時間里可以穩定、持續、高效的發電. 然而,光伏陣列往往安裝在戶外,工作環境惡劣,容易受到環境因素的影響,從而導致各種故障的發生[3],這些故障往往會對光伏系統的性能和壽命產生不同的影響,尤其是會降低光伏系統的輸出功率,造成能量損失,嚴重的甚至會引發火災[4]. 由此可見,為了讓光伏組件盡可能地逼近其理論壽命,快速、準確地發現和定位光伏故障并及時解決非常重要.為快速、準確地發現并定位光伏故障,各國學者們紛紛提出了不同的解決方法. 基于紅外圖像分析法能夠很好地定位光伏組件故障發生的位置[5],然而,當輻照度相對較低時,溫度變化可能不大,從而降低診斷的精度. 另外,熱像儀昂貴的價格也大大增加了光伏電站的建設成本,限制了該方案的普及. 時域反射分析法通過比較注入的脈沖信號與接收到的反饋信號的形狀變化和延遲時間來判斷故障類型和位置[6-8],但由于這種方法需要信號發生器和一個參照基準來實現,硬件集成、故障位置和外部設備之間的距離都會影響到檢測精度. 伴隨著人工智能的興起,基于人工神經網絡的方法也被廣泛應用于光伏行業. 當光伏系統發生故障時,把故障狀態和故障原因之間的對應關系通過神經網絡的學習后保存在神經網絡結構和權值中,將測量得到的特征值輸入到訓練好的神經網絡,即可實現故障診斷[9-12]. 然而,研究者們多將此方法應用于整個陣列的故障類別的診斷,而不是故障的定位. 在故障定位方面的研究,研究者大多采用基于多傳感器的方法,即為一個或數個光伏組件安裝電壓/電流等傳感器,通過分析采集到的傳感器數據來判斷光伏陣列的故障類型和故障位置. 如果在每個光伏組件都使用無線自供電傳感器來檢測和定位故障,雖然定位效果很好,但對于大規模的光伏發電系統而言,需要安裝數量不小的傳感器,極大增加了光伏發電系統的成本[13-14]. 為此,有研究者嘗試通過優化傳感器的位置配置來降低系統成本. 文獻[15]監測了每個串中第一個和最后一個模塊電壓及其電壓變化模式來識別和定位故障,文獻[16]通過測量每個串的輸入和輸出電流來識別故障. 這些方法在一定程度上減少了傳感器數量,但只能將故障定位到組串級別,而且大多需要從傳感器的數據閾值去判斷,而閾值的大小完全由人工設定,這會在很大程度上影響故障診斷模型的準確性與泛化性.
機器學習可以通過對歷史數據的訓練得到診斷模型,這有效避免了人為設定閾值所帶來的上述問題. 傳統的基于梯度的機器學習算法往往存在局部極小、學習速率不當和過擬合等問題,而極限學習機(extreme learning machine,ELM)通過對輸入權值與偏重采取隨機賦值,并通過計算廣義逆矩陣直接得出輸出權重,從而避免了上述問題,學習速度更快[17]. 同時,一定數量的傳感器可以幫助操作人員進一步確定故障發生的位置,為降低傳感器的購買成本,本研究優化了傳感器的布局,只在每個組串的下半部分安裝一個電壓傳感器,這樣類似于二分法的布局結構,不僅可以將故障定位至組串,而且可以分辨出是上下哪部分發生了故障. 因此,本研究將機器學習與傳感器優化這二者的優勢結合到一起,應用于光伏陣列故障診斷與定位中. 首先, 根據所提布局布置電壓傳感器,并基于實驗室屋頂光伏并網發電平臺采集包括正常、開路、串內短路與串間短路這4個大類狀態下細化后的18個子類的樣本數據,將定位問題轉化為多分類問題; 然后, 將樣本數據輸入極限學習機進行分類模型訓練; 最后,將訓練結果與幾種傳統的機器學習模型的結果作了對比.
1 電壓傳感器布局與故障特征分析
1.1 傳感器布局
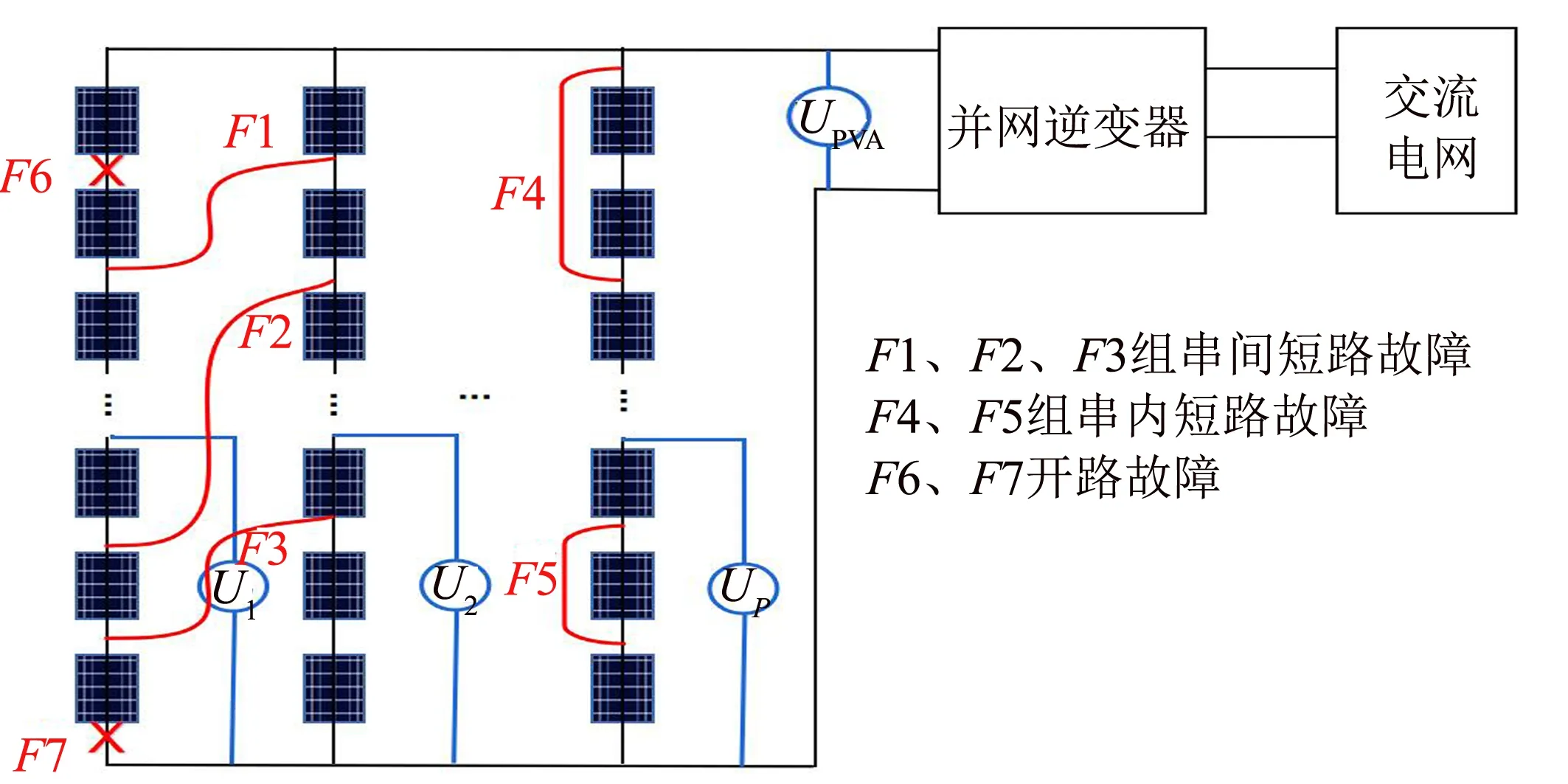
圖1 光伏并網發電系統和傳感器布局與故障設置示意圖Fig.1 Photovoltaic grid-connected system and sensor layout and fault setting diagram
一個典型的光伏并網發電系統主要由光伏陣列、并網逆變器,以及一些傳感電路、保護裝置等構成,其中光伏陣列由P串相同組串并聯而成,每串由S塊光伏組件串聯而成,因此稱此種連接方式為SP串并聯. 圖1給出本研究所提出的傳感器的布局方式,即在每個組串的中間節點與底部節點之間安裝一個電壓傳感器(U1~UP),并用一個電壓傳感器檢測陣列電壓(UPVA), 同時描繪本研究所設置的部分故障(F1~F7).
1.2 基于所設計優化布局的故障特征分析
圖2(a)和圖2(b)分別顯示了光伏陣列在正常、開路及短路情況下的I-U、P-U特性曲線,其中點A和D、點B和E、點C和F分別對應正常、開路與短路下陣列的最大功率點.

(a) I-U

(b) P-U
根據圖1給出的電壓傳感器的布局方式,以傳感器的上端節點為分割點,將組串分為上下兩部分.
Ⅰ) 無故障情況. 各串的電壓傳感器的示數在允許的誤差范圍內應該是相同的,而且其大小應該為陣列電壓的一半.
Ⅱ) 串間短路故障. 如圖1中的故障F1、F2與F3所示,當兩組串之間發生短路時,兩組串故障點以下的部分形成了并聯結構,為保持兩部分電壓值相等,對于故障組件數少的部分,單塊組件的電壓會被拉高,對于故障組件較多的部分,單塊組件的電壓會變小.
Ⅲ) 串內短路故障. 由圖2(b)所示的P-U特性曲線可以看出,當短路故障發生時,最大功率點的電壓會低于正常情況,即點C(點F)處的電壓小于點A(點D)處的電壓,故障組串中的健康組件的電壓值將會高于健康組串中的組件的電壓值. 因此,當串內短路故障發生于光伏串的上半部分時(如圖1中F4),故障串的電壓傳感器的示數為故障組串中的健康組件的電壓值乘以該組串下半部分的所有組件個數; 當串內短路故障發生于光伏組串的下半部分時(如圖1中F5),故障串的電壓傳感器的示數為故障組串中的健康組件的電壓值乘以該組串下半部分中健康組件個數.
Ⅳ) 開路故障. 由圖2(a)所示的I-U特性曲線可以看出,當開路故障發生時,陣列的最大功率點處的電流會低于正常情況,即點B(點E)處的電流小于點A(點D)處的電流. 因此,當開路故障發生于光伏組串的上半部分時(如圖1中F6),故障串的電壓傳感器的示數為組件開路電壓乘以該組串下半部分的所有組件個數; 當開路故障發生于光伏組串的下半部分時(如圖1中F7),故障串的電壓傳感器的示數為陣列電壓減去開路電壓與該組串上半部分的組件個數的積.
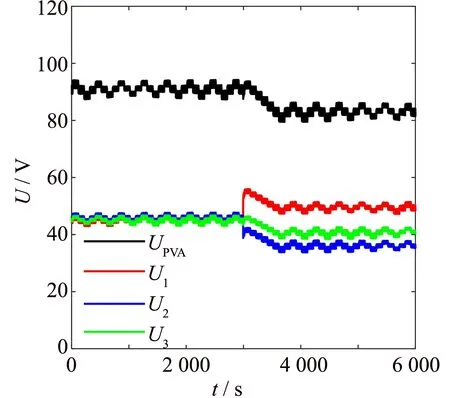
對于上述光伏故障的特征分析,通過實驗平臺所采集數據進行了驗證,實驗平臺將會在本研究第三部分進行介紹. 如圖3所示,當發生不同的故障時,電壓傳感器的變化趨勢是明顯不同的. 從圖3(a)中可以看出,正常情況下,各串電壓傳感器的值是相等的,為陣列電壓的一半; 從圖3(b)中可以看出,串間短路故障發生的時候,發生故障的兩個組串傳感器電壓分別出現明顯的上升與明顯的下降,陣列電壓下降,其他健康組串的傳感器電壓也會下降,且下降程度明顯小于故障組串傳感器電壓的下降程度; 如圖3(c),串內短路故障發生于組串上半部分的時候,故障組串電壓傳感器的示數上升,陣列電壓下降,其他健康組串的傳感器電壓下降,且下降的趨勢一致; 如圖3(d)所示,串內短路故障發生于組串下半部分的時候,故障組串傳感器電壓明顯下降,陣列電壓下降,其他健康組串的傳感器電壓下降,且下降趨勢一致,但是下降程度明顯小于故障組串傳感器電壓的下降程度; 如圖3(e),開路故障發生于組串上半部分的時候,故障組串電壓傳感器的示數會明顯上升到一個固定值(即3個組件的開路電壓)不再隨逆變器的調節所波動,且陣列電壓與其他健康組串的傳感器電壓不會受故障影響; 從圖3(f)可以看出,開路故障發生于組串下半部分的時候,故障組串電壓傳感器的示數會明顯下降(即陣列電壓減去3個開路組件的開路電壓),陣列電壓與其他健康組串的傳感器電壓幾乎不會受故障影響. 因此,本研究采用這4個電壓值作為輸入訓練基于ELM的故障檢測和定位模型.

(a) 正常情況
(b) 串間短路故障

(c) 串內短路故障發生于組串上半部分
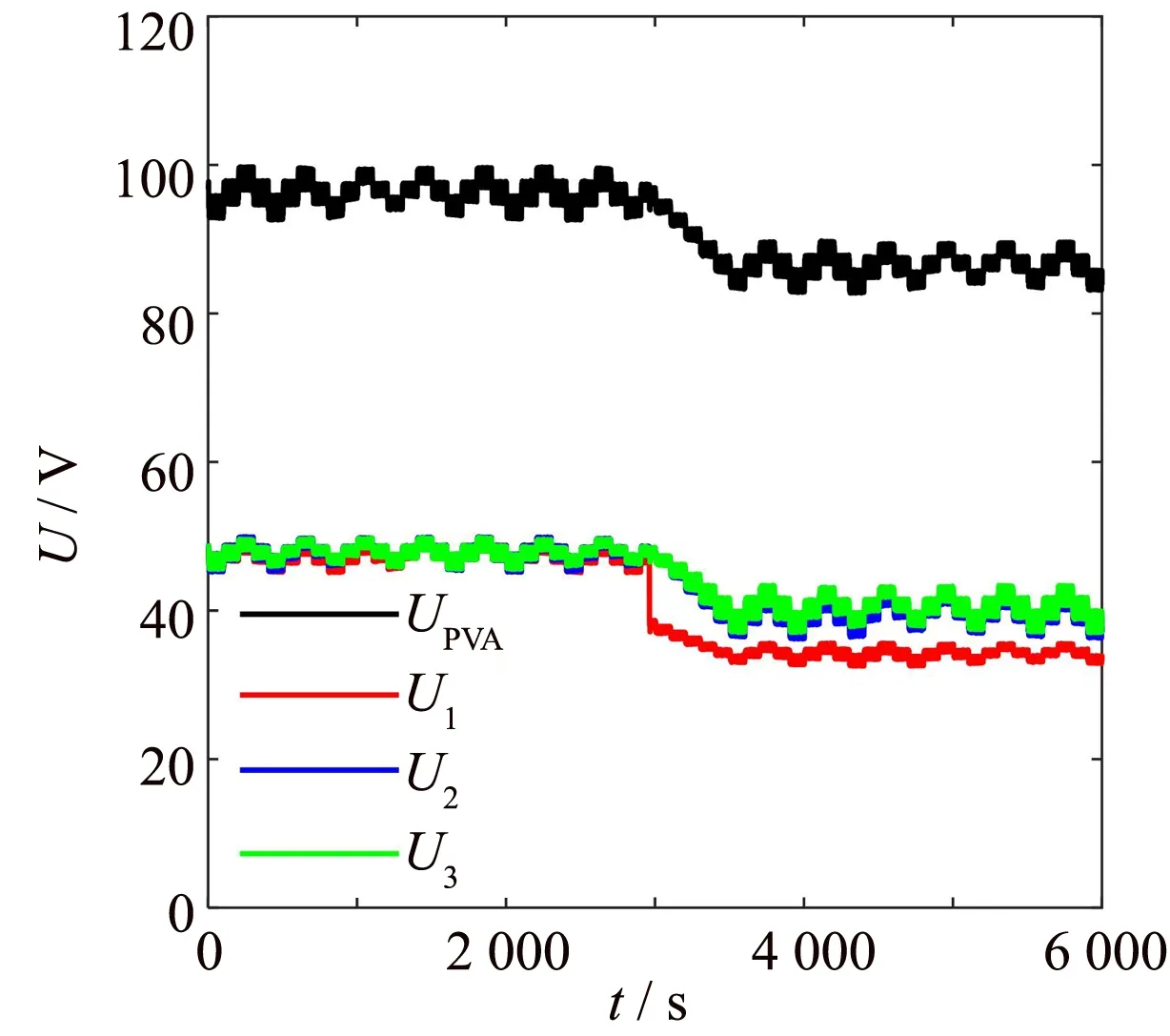
(d) 串內短路故障發生于組串下半部分

(e) 開路故障發生于組串上半部分

(f) 開路故障發生于組串下半部分
2 極限學習機
2.1 極限學習機原理

圖4 極限學習機網絡結構Fig.4 Network structure of extreme learning machine
極限學習機(ELM)由南洋理工大學的黃廣斌教授等[17]于2004年提出. 其主要結構如圖4所示,由輸入層、隱藏層與輸出層構成. 由輸入層到隱藏層可以看作一個全連接層,其連接權重和偏差都由計算機隨機選取; 從隱藏層到輸出層的連接權重,通過最小化輸出矩陣與樣本實際標簽的平方差得到. 相比于傳統的單隱層前饋神經網絡,有效避免了大量的迭代計算,極大地加快了訓練速度.
2.2 故障識別流程
結合ELM,故障識別的流程有如下5點具體步驟.
1) 樣本數據采集. 在光伏陣列設置各種故障狀態,采集并保存各電壓傳感器的數據作為原始數據集.
2) 數據預處理. 對原始數據集中的數據進行歸一化處理,通過除以陣列在標準測試條件下的開路電壓,使對各電壓值歸一化至[0,1]區間,并將處理后的數據集按照7∶ 3分為訓練樣本和測試樣本.
3) 參數初始化. 選擇隱藏層神經元數量L,激活函數g(·),隨機產生輸入權重矩陣ωi和偏置bi.
4) 模型訓練. 將訓練集數據加載至網絡進行模型訓練,計算出隱藏層輸出矩陣H、輸出層權重β.
5) 模型測試. 將測試集數據加載至訓練好的模型進行模型測試.
6) 故障識別. 利用通過測試的模型進行故障的識別.
3 實驗分析
3.1 實驗環境
3.1.1故障類別的設置
基于節1.2對故障特征的分析,對正常工作、串間短路、串內短路和開路等幾大狀態類別進行細化,以驗證所提方法在不同組串和不同失配情況下定位的準確性. 表1與圖5分別給出了細化后的各類故障與對應的故障設置圖. 其中,標簽0代表光伏正常工作; 標簽1~5是串間短路故障,并按照串間短路兩個故障點所在的位置與失配的塊數進行故障細化; 標簽6~13是串內短路故障,同樣按照故障點所在位置與失配的塊數進行故障細化; 標簽14~17是開路故障,按照故障發生的位置進行故障細化.

表1 光伏故障類型設置

圖5 光伏陣列故障細化類型設置圖Fig.5 Photovoltaic array detailed fault types setting diagram
3.1.2實驗的獲取
基于實驗室的屋頂光伏并網發電實驗平臺,對節3.1.1所設置的18種狀態進行故障的設置與數據采集,以驗證方法的可行性. 如圖6所示,實驗平臺主要由光伏陣列、匯流箱、傳感電路、并網逆變器、數據采集卡和上位機構成. 其中光伏陣列由3個組串并聯而成,每個組串由6個組件串聯而成,光伏組件的型號為GL-M100太陽能組件,具體參數為:峰值功率100 W,最大功率點電壓17.5 V,最大功率點電流5.71 A,開路電壓21.5 V,短路電流6.03 A. 實驗在晴天的不同時段分別對18種故障進行了數據的連續采集,并取其故障后的穩態數據點樣本作為實驗數據集. 所采用的電腦平臺參數如下:處理器為Inter(R) Core(TM) i5-4200H@2.80 GHz,內存為8.0 GB, 操作系統為Windows 10,軟件平臺為Python 3.8.8.

(a) 戶外光伏陣列

(b) 系統室內組成1
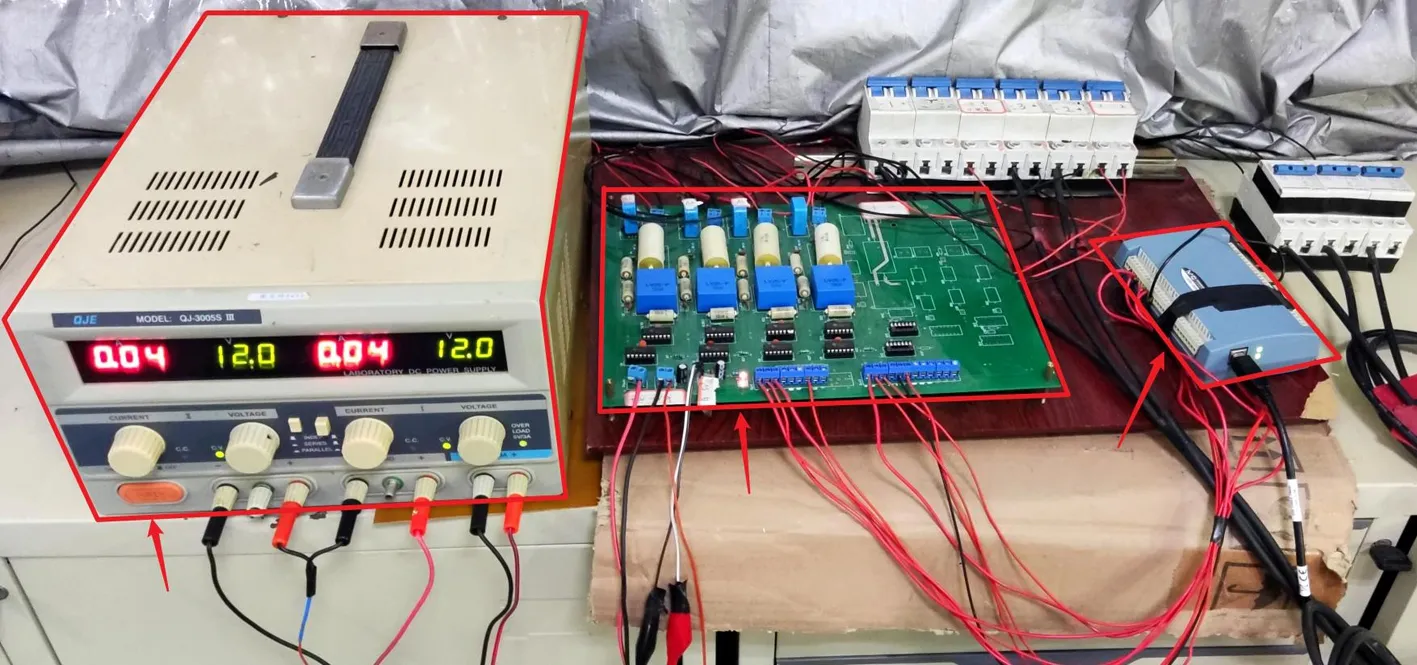
(c)系統室內組成2
3.2 實驗結果與分析
為評估所用模型對于光伏故障的分類效果,將ELM與支持向量機(support vector machine,SVM)[10]、多層感知機(multilayer perceptron,MLP)[11]及隨機森林(random forest,RF)[12]這幾個經典機器學習算法進行效果對比. 其中,ELM的隱藏層神經節點數L取200; SVM選用徑向基核函數,核函數參數γ默認取特征維數的倒數即0.25,懲罰系數C取100; MLP網絡的隱藏層數為2,每層的神經元數為50; RF中樹的數目取50.

圖7 各模型分類精確率對比圖Fig.7 Comparison of classification precision of each model
將實驗數據集分別在上述各模型下各訓練10次并取結果的平均值對模型進行評估,結果列于圖7. 從圖7給出的分類精度對比可以看出,對于故障類型為0、1、3、4、7、8、9、10、11、12、14、15這幾類故障,4個算法的分類精確率都超過了98%; SVM對于故障類型2與類型17的分類精確率分別為95.74%和95.65%,效果較弱; MLP對于故障類型2的分類精確率僅為92.80%,明顯弱于其他模型; ELM與RF算法的分類效果更加均衡,對于每種故障的分類精確率都在96%以上,本研究ELM算法對于每種故障的分類精確率更是在97%以上,分類效果相比于RF算法更勝一籌.各模型的分類精確率如表2所示,統計得ELM、SVM、MLP、RF算法的平均分類精確率分別為99.52%、99.08%、98.69%和99.13%. 可以看出,4個算法對于實測數據的故障分類都有較高的精確率,表明本研究所采用的電壓傳感器布局方式結合機器學習算法對光伏陣列的故障區域定位具有良好的效果. 由結果可知,本研究所用的ELM分類效果優于其他3個對比算法.

表2 各網絡模型分類效果對比
表3給出了各模型的計算時間的對比. 可以看出,ELM的學習速度最快,訓練時間最短,為0.102 4 s,測試時間位居第2; MLP的平均測試時間僅為0.005 6 s,用時最短,但是其訓練速度最慢.

表3 各模型計算速度對比
綜上分析可知,ELM無論是在對各故障類別的分類精確率,還是在模型的訓練速度方面,都比參與對比的SVM、MLP、RF算法更有優勢.
4 結語
及時檢測并定位光伏陣列中的故障可以保證發電系統安全、穩定運行,并延長組件的工作壽命. 為了在降低成本的同時保證一定的定位精度,將傳統的傳感器布局策略進行優化,只采用少數電壓傳感器,并將故障診斷與區域定位轉化為多分類問題. 為了避免人為確定閾值的不足,選用ELM網絡訓練分類模型. 采集實驗數據對模型進行驗證,實驗表明,與SVM、MLP及RF等機器學習方法相比,本研究具有更高的分類精度,平均分類精確率為99.52%,同時具有更快的模型訓練速度,平均訓練時間0.102 4 s,且無需環境參數數據. 因此,本研究基于所采用的電壓傳感器布局方式,結合機器學習算法所建立的光伏陣列的故障區域定位模型具有較好的可行性. 雖然本研究實現了較高的故障診斷和區域定位精度,但若將定位轉化為分類問題的解決思路應用到大規模光伏陣列,會造成故障類別數大幅增加而使所需的標定樣本數據集變大,因此在后續工作和研究中將結合半監督等機器學習方法對其進一步優化.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
