基于搖擺式三鏡頭傾斜攝影裝置的傾斜攝影測量技術在實景三維建模中的應用
2022-07-20 05:58:50廣西壯族自治區地理信息測繪院蔣小海
數字技術與應用 2022年6期
關鍵詞:模型
廣西壯族自治區地理信息測繪院 蔣小海
隨著實景三維中國建設的深入推進,基于傾斜攝影技術的實景三維場景也將越來越被廣泛的應用。本文針對傾斜攝影技術和實景三維建模,介紹一種利用無人機搭載搖擺式三鏡頭傾斜攝影裝置,及其在開展傾斜攝影影像獲取并完成實景三維場景生產的應用案例,并驗證了其在實景三維建模中的優勢和可行性。
隨著實景三維中國建設的深入推進,基于傾斜攝影技術的實景三維模型場景也將越來越被廣泛的應用,如何基于傾斜攝影測量技術快速、靈活地獲取傾斜攝影影像并完成實景三維場景也逐步被行業內所重視,然而專業的傾斜航攝系統如徠卡RCD30 傾斜相機、SWDC-4數字航空攝影儀,需要大型有人駕駛飛行平臺進行搭載,大型飛行平臺航飛空域申請較復雜,對飛行平臺起飛及降落場地要求有嚴格要求,且作業成本高,隨著技術的快速的發展,無人機技術愈發成熟,使用無人機搭載航空攝影設備拍攝地表地物的正攝影像和各個側面的傾斜影像,然后基于多角度影像進行三維建模,得到具有可量測性的實景三維模型,更具優勢。本文介紹了一種搖擺式三鏡頭傾斜攝影裝置搭載于旋翼無人機平臺進行的航空傾斜航攝的技術方案,并在實際生產項目中驗證其在實景三維建模中的生產優勢和可行性。
1 傾斜三維攝影測量技術原理
1.1 傾斜三維攝影測量技術原理說明
傾斜攝影測量技術是一種由飛行平臺搭載航空攝影攝影儀多角度傾斜攝影測量技術的新型航空攝影技術,傳統航空攝影只能獲取垂直視角地面物體場景,通過在同飛行平臺上搭載多個傾斜相機或搖擺式航攝裝置,多鏡頭同步對地面地物的投影正面和地物的豎立面等多視角拍攝,所獲得的航空影像航片具有高分辨率、多角度地面特性的特點,且地物側面有清晰的紋理,實現實景三維建模處理時真實場景構建。
1.2 搖擺式三鏡頭傾斜攝影裝置簡述
搖擺式三鏡頭傾斜攝影裝置為我院自主研發的新型傾斜攝影航攝儀,其由3 臺索尼A7R 相機組成,可同時獲取5 個以上方向的航空影像,其中相機傾斜角度為40°,擺動角度為35°,裝置結構如圖1 所示。
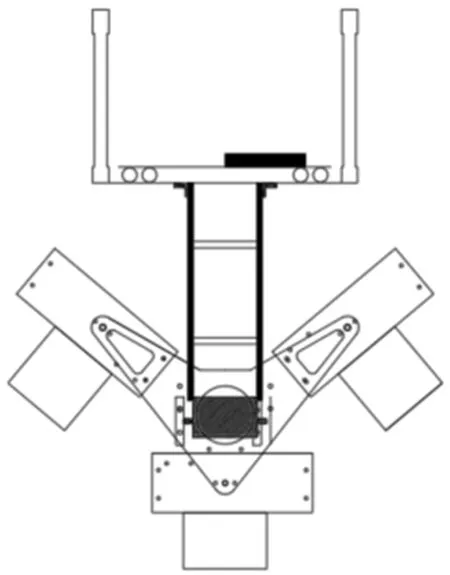
圖1 搖擺式航攝設備結構Fig.1 Structure of swing aerial camera equipment
該搖擺式航攝設備結構均模塊化、工作穩定、拍攝角度綜合優化、拍攝速度可調控、安裝方便、操作簡單、抗電磁干擾能力強、兼容市面所有飛行平臺,克服了現有兩鏡頭搖擺航攝設備在獲取地表地物時,飛行航向左右側方影像數據獲取時有漏洞、正下方影像完全缺失,飛行航向前后地物側方影像數據采集不全等缺陷,靈活獲取地表地物傾斜影像全覆蓋無死角,可實現高精度的三維建模任務。
2 總體技術路線
利用無人機搭載搖擺式三鏡頭傾斜攝影裝置獲取傾斜攝影影像,經過空三加密處理后,生成測區整體三維模型,在此基礎上,通過三維建模軟件對場景模型進行修飾完成三維模型生產,其中,搖擺式三鏡頭航攝儀獲取的多角度影像中,正射視角獲取的垂直影像提供模型頂部紋理信息,通過側面傾斜角度鏡頭獲取地面建筑物側面紋理信息。總體技術路線如圖2 所示。
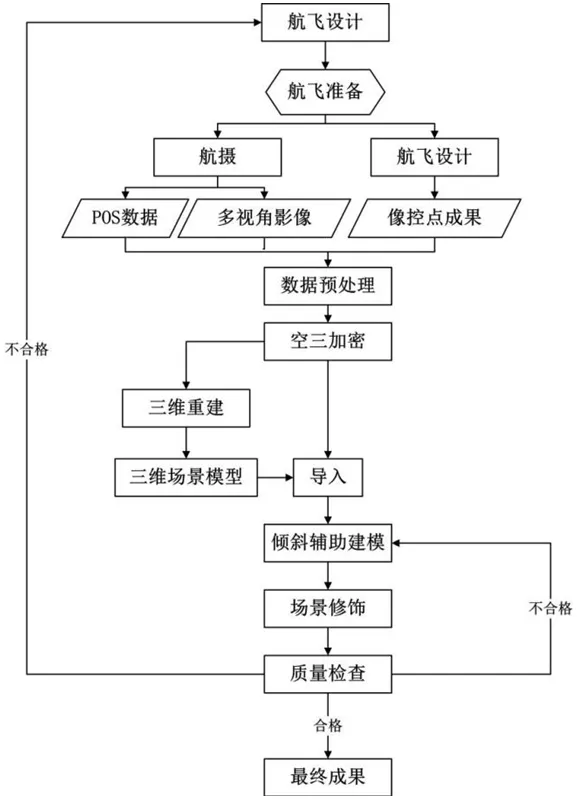
圖2 總體技術工藝流程Fig.2 Overall technical process flow
3 應用案例
為驗證該技術方案在實景三維建模應用中的可行性,特別是在城市級三維建模上的優勢,結合實際項目生產,在柳州市建成區范圍內選取了約31km的區域開展測試驗證。
3.1 航飛設計
本項目初設計以下航飛計劃方案如表1 所示,作業時根據天氣、時間安排等實際情況進行航飛。

表1 無人機航飛設計方案Tab.1 UAV flight design scheme
3.2 航飛數據采集
使用無人機平臺搭載搖擺式三鏡頭傾斜攝影裝置對測區內進行航空數據采集,獲取多角度影像原始數據、差分數據解算整理即得影像所對應的POS 數據、通過獲取的優質航空影像原片和高精度POS 數據。
3.3 數據預處理
3.3.1 影像數據預處理
航攝攝影外業飛行航飛獲取的優質航空影像原片和高精度POS 數據成果,經過航片數據核查、項目范圍、航攝儀參數、POS 數據定位和IMU 姿態數據整理、空中三角測量計算合格的成果導入等數據進行前期處置,剔除有問題的原始成果,來保障各級數據生產質量。
航空傾斜攝影測量,航片數據預處理主要對后期的模型生產效率及模型色彩有影響。為了生產出高質量模型,處理步驟如下:
(1)使用軟件對航空攝影所獲取的航片原片進行調整,去除原始航片中陰影、水面過曝、不同架次不同天氣飛行的航片數據進行調色,以保證模型色彩一致,提升模型美觀及精度。
(2)可以采用聯網模式加快數據處理,保障項目工期。
3.3.2 POS 數據預處理
POS 數據通過所配置差分所得數據通過地面架設的GPS 作為基準進行解算,基準精度根據當地CORS 或者千尋信號精度,按照GPS 定位技術對每張航空影像進行精密計算絕對位置,通過軟件再將影像位置結果飛行控制的慣導(IMU)數據融合處理計算,根據項目所需的數學精度(投影和坐標系統)進行成果轉換,通過參數轉換解算出每張航空影像的各外方位元素。
3.4 空中三角測量
作業范圍內原始影像數據較多,航片較多情況應進行分區域進行空三運行,結果合格后再進行分區合格空三成果整合,對數據兩大分區的空三運行范圍大小應根據航線及所布設的航控點進行劃分,所分區域應有足夠相互重疊的航片,對所分區域進行空三運算時先設置參數自動匹配,必要時進行人工干預計算,直至空三平差結果滿足項目設計要求,然后進行區塊的合并。
子區域網平差達到要求后,將所有子網空三成果進行區域網合并,處理得到測區的整體空三成果。
3.5 傾斜三維模型構建
在獲取滿足質量要求的航攝影像和控制點成果后,利用傾斜影像,控制點轉刺后進行空三加密;使用質量合格的航測控制點成果與傾斜攝影所獲取的航片,進行實景三維模型生產與模型紋理貼片。
(1)根據三維模型瀏覽器的參數要求與作業區域實際情況,確定模型的坐標系統和分塊大小,為了方便接邊工作,要求分塊大小為50m 的整數倍。在成果生產前需對空三成果進行檢查,利用滿足精度要求的空三成果及傾斜影像生成三維模型成果。
(2)對于存在大面積水面的作業區域,為減少在生成的三維模型中進行大量后期修改,可添加水面約束后更新三維模型。
3.6 三維模型紋理映射
實景三維建模模型紋理映射包括三維模型與紋理圖像的匹配和紋理貼片。無人機航空攝影傾斜測量平臺獲取的方式為多視角航空影像,影像上同一地面地物涉及多張航片,選取質量清晰的航片數據是保障三維模型紋理貼合的保障,此項目采用建模三維模型的三角網與所獲影像之間的三角函數關系來進行匹配,角度越小證明改三角網的面與影像越匹配,模型紋理清晰度越高,采用這種方式,所對應的地面地物匹配到已構建的三維模型中的三角網面上,通過軟件運算三維模型與每個三角網與所配對的影像的幾何關系,最終確定三維模型中三角網所需要配對的航空影像數據區域,從而使生產的三維模型與航片紋理貼合,實現模型紋理貼圖。
3.7 模型重建
(1)根據三維模型瀏覽器的要求及三維重建平臺本身的限制,確定模型的分塊大小和重疊度,根據建設方提供的測區大小確定生成三維成果的范圍;
(2)對于存在水面的區域需要在生成的三維模型中進行后期修改,并重新添加水面約束后更新三維模型;
(3)在成果輸出前,需要對空三結果進行檢查,確定其精度滿足要求。
3.8 模型修飾
三維實景建模重建生產出新的三維實景模型可能存在一些問題。例如不能在航飛時采集到的視場死角、建筑物側面的反光、河流、水庫大型的水面、運動中的物體等,則需要修改已建好的實景模型,做為三維實景重建的模型修整,更改所用軟件的自動生成模式。
模型修飾分兩個級別:
(1)幾何結構。僅對參考三維模型的幾何結構進行修改,修飾模型的紋理將被忽略。在再次進行三維重建時,保留修改后的幾何結構,并重新進行貼紋理。
(2)紋理和幾何結構。對參考三維模型的紋理和幾何結構進行修改。在再次進行三維重建時,紋理和幾何結構都會保留修飾原樣。
3.9 模型重建結果檢查
模型重建結果檢查指三維模型還未經過后處理,通過軟件自動化完成的重建結果需要檢查的內容。主要涉及元數據、坐標系、現勢性檢查及模型完整性等,此過程作為一個基本檢查,檢查合格后方可進入后處理環節。數據最終的詳細檢查應通過后文的兩級檢查完成。
3.10 三維成果輸出
使用基于計算機視覺和攝影測量的影像軟件,輸出的格式為通用格式(OSGB)模型成果,文件夾是為Tile 分級文件內的Data 文件夾構成,每一個Tile 文件夾里面是由不瓦片名稱的Data 文件名OSGB 模型組成。在建模軟件中通過建立索引文件將多個OSGB 格式瓦片數據拼接起來成為一個整體模型,以方便用多種軟件進行模型瀏覽。
在三維模型瀏覽工具中對成果三維模型進行多視角檢查,對項目范圍邊緣模型有明顯的變形、粘合、模型產生紋理漏洞和懸浮物等進行標記,將對應需要修改的瓦片數據在模型中進行編輯處理,進而得到紋理清晰的優質三維模型。
4 結語
隨著無人機傾斜攝影技術的不斷進步,傾斜攝影系統設備將向著模塊化、智能化、高精度的方向發展,傾斜航攝儀作為傾斜攝影系統設備的重要組成部分,將會是下一步研究的重要內容。加大新型傾斜航攝儀裝備的研發,改善傾斜影像獲取的工藝流程,將能有效實現高精度、高分辨的實景三維建模任務,為“實景三維中國”建設提供有力技術參考,具有深遠而重大的意義。
引用
[1] 徐金財,李朝奎,陳建輝.一種基于3ds Max與Smart 3D的三維模型構建方法[J].測繪通報,2020(11):61-65.
[2] 林萬榮.傾斜攝影實景三維建模技術及其應用現狀分析[J].測繪與空間地理信息,2022,45(1):209-211.
[3] 蔡振鋒,彭斌,季霞,等.地市級實景三維城市建設及應用:以實景三維臨沂建設為例[J].測繪通報,2021(11):115-119+144.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19