基于RSSI的低成本室內(nèi)三維空間定位模型研究
2022-07-21 06:09:48顧祥玉趙千倩
物聯(lián)網(wǎng)技術(shù) 2022年7期
陳 靜,顧祥玉,趙千倩,吳 瑩,余 雨
(南京工程學(xué)院 信息與通信工程學(xué)院,江蘇 南京 210000)
0 引 言
2019年,第五代移動通信(5G)系統(tǒng)開始商業(yè)化。在5G三大應(yīng)用場景中,大規(guī)模機(jī)器通信(mMTC)作為物聯(lián)網(wǎng)和工業(yè)互聯(lián)網(wǎng)潛在而重要的應(yīng)用場景,一直以來深受國內(nèi)外研究者關(guān)注。
伴隨移動通信技術(shù)的不斷更新,無線傳感器網(wǎng)的布設(shè)和應(yīng)用量得到了前所未有的提升。無線傳感器網(wǎng)是由大量微型低成本傳感器構(gòu)成的多跳自組織網(wǎng)絡(luò),在節(jié)點處采用無線的方式進(jìn)行通信,被監(jiān)控對象的信息以協(xié)同的方式被感知、收集、處理和傳輸,具有實現(xiàn)區(qū)域的監(jiān)測、為用戶提供服務(wù)的多項功能,因此被廣泛應(yīng)用于各個領(lǐng)域。
在無線傳感器網(wǎng)中,如果要確定各個傳感器、智能設(shè)備和物聯(lián)節(jié)點的位置,從而開展設(shè)備維護(hù)、信息更新和數(shù)據(jù)采集任務(wù),那么定位功能不可或缺。位置信息的獲取和應(yīng)用成為人們生活中的重要需求,缺失定位的監(jiān)測信息是不完整的。因此,無線傳感器網(wǎng)中的定位問題已經(jīng)成為人們研究的熱點。
在mMTC應(yīng)用場景下大量的傳感節(jié)點被布設(shè)在環(huán)境中,如果單獨引入定位系統(tǒng),將會較大程度地增加通信系統(tǒng)構(gòu)建的成本,采用傳感器、智能設(shè)備和物聯(lián)節(jié)點自帶的信號或者功能進(jìn)行定位是較好的解決方案。實際上,當(dāng)前物聯(lián)網(wǎng)環(huán)境中,大部分節(jié)點采用ZigBee、WiFi或藍(lán)牙進(jìn)行無線通信,未來可能會應(yīng)用毫米波頻段相關(guān)技術(shù)進(jìn)行數(shù)據(jù)傳輸和匯集。這些無線通信技術(shù)有一個共同的特點,即采用RSSI或類似指標(biāo)進(jìn)行信號強(qiáng)度檢測。因此,為了保證物聯(lián)網(wǎng)應(yīng)用的準(zhǔn)確性、完整性和經(jīng)濟(jì)性,如何利用RSSI信號構(gòu)建低成本的室內(nèi)物聯(lián)網(wǎng)環(huán)境下3D定位系統(tǒng)成為了亟需解決的關(guān)鍵問題。
1 相關(guān)研究工作
現(xiàn)有無線傳感網(wǎng)定位方法可以分為3類:鄰近信息法、場景分析法、幾何特征法。其中,幾何特征法是一種基于幾何原理的定位算法,是目前應(yīng)用最廣泛的定位算法,一般情形下需要確定多個點及多條邊作為已知條件。
1.1 基于RSSI的質(zhì)心定位算法
質(zhì)心定位算法是利用連接性進(jìn)行定位的算法,在不確定距離信息的情況下就可以進(jìn)行簡單的定位,容易實現(xiàn)。算法的原理主要是利用錨節(jié)點以一定的時間為周期向四周發(fā)射自身的位置信息和唯一的標(biāo)識符,待定位的盲節(jié)點不斷搜索附近不同的錨節(jié)點信息,當(dāng)收到的信息來自不同的錨節(jié)點并且錨節(jié)點的數(shù)達(dá)到某一閾值后,就通過個錨節(jié)點確定自身的位置。假設(shè)盲節(jié)點的坐標(biāo)為(,),個錨節(jié)點的坐標(biāo)依次為(,),(,),...,(x,y),利用質(zhì)心算法可得未知節(jié)點的坐標(biāo)為:

傳統(tǒng)質(zhì)心定位算法的不足之處在于:當(dāng)盲節(jié)點所發(fā)射的信號在各個錨節(jié)點處形成的信號強(qiáng)度值方差相差很大時,就會導(dǎo)致較大的定位誤差。
1.2 三邊定位算法
三邊定位算法通過測量待定位節(jié)點與三個信標(biāo)節(jié)點間的距離,計算得到未知節(jié)點的位置。通過此種定位算法不難得出未知節(jié)點接收信標(biāo)節(jié)點的數(shù)據(jù)信息,待定位未知節(jié)點必須在其通信范圍內(nèi)。基本原理如圖1所示。

圖1 三邊測量法的原理
已知未知節(jié)點接收來自于、、位置信息的數(shù)據(jù)包,、、三點的坐標(biāo)信息為(x,y)、(x,y)、(x,y)、節(jié)點接收數(shù)據(jù)信息的距離為d、d、d,令未知節(jié)點的坐標(biāo)為(,),建立如下方程即可解得點的值:

然而這些研究主要采用的是WSN技術(shù),成本高,且只能進(jìn)行二維定位,缺乏對設(shè)備的高度信息的反饋。因此,本文針對上述問題,提出一個基于RSSI的低成本室內(nèi)三維空間定位模型并通過實驗進(jìn)行驗證。
2 實驗方案設(shè)計
如前所述,現(xiàn)有大部分傳感器、智能設(shè)備或物聯(lián)節(jié)點都采用ZigBee、WiFi或藍(lán)牙無線通信協(xié)議,這些無線通信協(xié)議的RSSI信息較易獲取。為了構(gòu)建低成本的室內(nèi)物聯(lián)網(wǎng)環(huán)境下3D定位系統(tǒng),不失一般性地,本文采用ZigBee技術(shù)對三維室內(nèi)空間的定位進(jìn)行研究,進(jìn)而推廣到WiFi或藍(lán)牙技術(shù)的定位。
ZigBee技術(shù)是無線傳感器網(wǎng)絡(luò)中常用的無線通信技術(shù),具有低功耗、低成本、高擴(kuò)充及自組織等特性,且部署簡單,在軍事、環(huán)境、醫(yī)療、智能家居和工業(yè)控制等諸多領(lǐng)域都已展現(xiàn)出較為廣闊的應(yīng)用前景。使用ZigBee技術(shù)進(jìn)行定位研究,有低成本、易實現(xiàn)及靈活性高等特點,在無線傳感器網(wǎng)絡(luò)中有著難以替代的作用。
CC2530是TI公司推出的用于2.4 GHz IEEE802.15.4和ZigBee應(yīng)用的真正的片上系統(tǒng)(SoC)解決方案,它具有業(yè)界領(lǐng)先的ZigBee協(xié)議棧(Z-Stack)并且能夠提供強(qiáng)大和完備的ZigBee解決方案。因此,研究基于ZigBee的物聯(lián)網(wǎng)環(huán)境中3D定位技術(shù)具有相當(dāng)大的可行性和重要的現(xiàn)實意義。
對點到點的RSSI數(shù)據(jù)和距離數(shù)據(jù)在實驗室環(huán)境中進(jìn)行了測試。測試條件:空曠室內(nèi)環(huán)境,尺寸為6 m×5 m×3 m。三個CC2530定位模塊每隔1 s分別定時發(fā)送數(shù)據(jù)給另一個CC2530待測定位模塊,每個位置點測試10次取平均值,同時將RSSI數(shù)據(jù)通過串口發(fā)送到筆記本電腦。筆記本電腦通過程序?qū)SSI數(shù)據(jù)處理成距離數(shù)據(jù)并矯正。
錨節(jié)點和盲節(jié)點硬件完全一致,差別在于所燒寫的軟件固件程序參考節(jié)點與移動節(jié)點采用了2.4 GHz IEEE802.15.4/RF4CE/ZigBee的片上系統(tǒng)解決方案,節(jié)點模塊可獨立上電使用。
RSSI測距算法公式為:

其中:表示信號射頻參數(shù),單位為dBm,含義是距離信標(biāo)節(jié)點1 m處接收到的信號平均能量的絕對值,即距離信標(biāo)節(jié)點1 m處的無線電信號強(qiáng)度;為信號衰減參數(shù),該參數(shù)值與環(huán)境有關(guān)。
利用RSSI進(jìn)行定位時,為減小環(huán)境和設(shè)備安裝所帶來的距離計算偏差,須采集多組值和RSSI值來確定和的值。
3 基于RSSI的低成本室內(nèi)三維空間定位模型
相對于點的三維定位數(shù)據(jù)如下:

三維定位是二維平面定位的延展,當(dāng)節(jié)點要實現(xiàn)在三維空間的定位時,用于定位的各項變量無論是錨節(jié)點的坐標(biāo)還是節(jié)點之間的距離,亦或者是角度數(shù)據(jù)都必須要擴(kuò)展到三維空間當(dāng)中去。此外,在進(jìn)行三維定位研究時,因考慮到的因素比二維更加復(fù)雜,在實際研究過程中需要采用適當(dāng)?shù)亩ㄎ晃恢糜嬎闼惴ㄒ约岸ㄎ谎芯磕P停拍軐崿F(xiàn)理論上可行的三維空間定位。本研究模型的構(gòu)建基于三維空間中的四個錨節(jié)點位置實現(xiàn)對空間盲節(jié)點的定位。基于ZigBee的物聯(lián)網(wǎng)環(huán)境中3D定位場景如圖2所示。

圖2 基于ZigBee的物聯(lián)網(wǎng)環(huán)境中3D定位場景
因研究中采集到的信號在實際傳輸過程中會受到各種干擾,如人的走動、環(huán)境信號噪聲等,因此需要對采集到的信號數(shù)據(jù)進(jìn)行處理,對算法進(jìn)行誤差校正。整個過程中的誤差主要由時間誤差和定位誤差兩部分組成,關(guān)系到未知節(jié)點的定位精度與RSSI的參數(shù)和基站節(jié)點測量位置的精度。在測量RSSI值參數(shù)時會受到多路徑、通信信道以及空間中的各種噪聲,甚至包含一些電磁場的干擾;另外,在計算定位過程中估計的誤差是不確定的。
4 實驗測試與仿真
表1給出了定位模型試驗數(shù)據(jù)對比結(jié)果,其中、、為理論坐標(biāo)值,、、為實際坐標(biāo)值。由表1數(shù)據(jù)可知,RSSI值與距離的擬合關(guān)系中存在著較強(qiáng)的線性關(guān)系。在實際的6 m×5 m×3 m空曠實驗環(huán)境中,考慮到ZigBee天線本身、多路徑及空間中的各種噪音,在各個發(fā)射和接收模塊的天線角度不變的情況下,對射頻參數(shù)即距離信標(biāo)節(jié)點1 m處的無線電信號強(qiáng)度進(jìn)行多次測量,并計算其平均值,以此減小誤差,在本次實驗中的取值為39 dBm;為信號衰減參數(shù),該參數(shù)值與環(huán)境有關(guān),在本次實驗中經(jīng)過多次測量和計算取值為3.15。
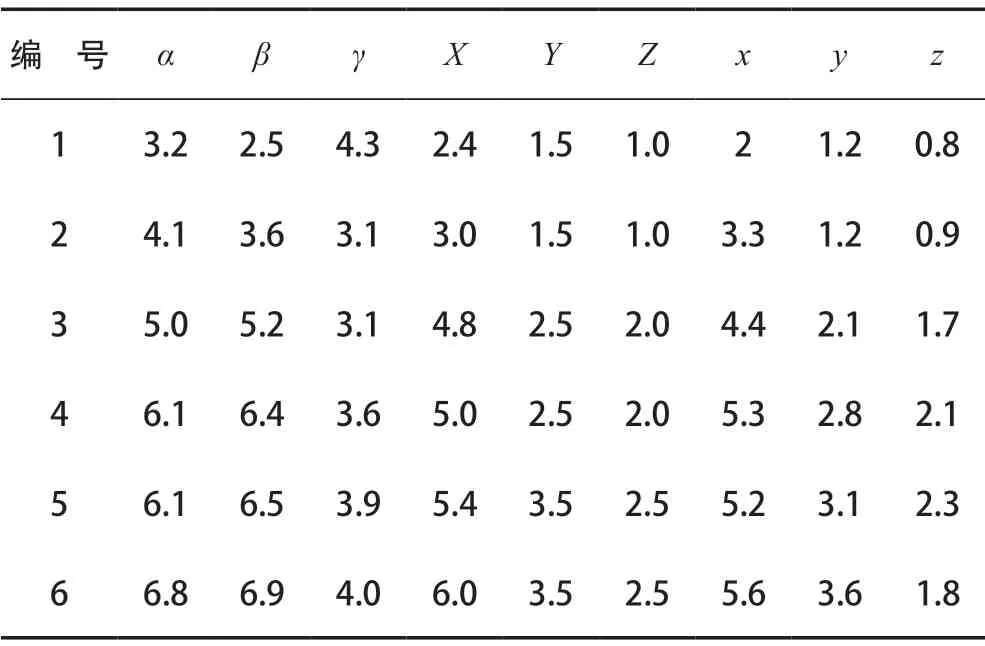
表1 定位模型試驗數(shù)據(jù)對比表
在無線傳感器網(wǎng)絡(luò)的錨節(jié)點部署完成后,設(shè)定錨節(jié)點發(fā)射通信信號,盲節(jié)點會得到該錨節(jié)點的個RSSI數(shù)據(jù)值。由于ZigBee定位的精度不高,所以在數(shù)據(jù)分析的過程中對數(shù)據(jù)的處理顯得尤為重要。先對改組數(shù)據(jù)序列進(jìn)行預(yù)處理:在信號序列中,對信號強(qiáng)度數(shù)據(jù)進(jìn)行大小排序,提出兩端可能含有粗差的數(shù)據(jù),找出信號強(qiáng)度數(shù)據(jù)的中位數(shù),選取一個以中位數(shù)為中點的區(qū)間,實心信號區(qū)間內(nèi)粗差數(shù)據(jù)減少;最后將選取的信號區(qū)域內(nèi)信號值求平均,并將結(jié)果作為最終輸出,用于最終坐標(biāo)位置定位估算。
如圖3所示,在文中的測試場景下RSSI值與三維坐標(biāo)值之間存在一定的關(guān)系,并且實驗中得到的實際數(shù)據(jù)和理論數(shù)據(jù)之間存在誤差,但是在ZigBee模塊的允許誤差范圍內(nèi)。在復(fù)雜的應(yīng)用場中,RSSI值轉(zhuǎn)化的理論三維坐標(biāo)與實際三維坐標(biāo)之間的誤差會增大,但是通過多組數(shù)據(jù)之間的擬合計算,可以實現(xiàn)簡易、粗略的測距和定位功能。

圖3 節(jié)點分布
5 結(jié) 語
本文從理論上提出了基于RSSI值的無線ZigBee測距定位技術(shù),構(gòu)建了基于RSSI的低成本三維空間定位模型,在實際操作中運用了CC2530測距定位模塊實現(xiàn)方式。通過實際測試,對RSSI和距離公式的參數(shù)設(shè)置精確化,得到了RSSI值與三維坐標(biāo)之間的關(guān)系;并且對實際數(shù)據(jù)和理論數(shù)據(jù)的誤差分析以及對原始數(shù)據(jù)處理的方法得到進(jìn)一步提升,為進(jìn)行下一步的高精度定位提供了實際基礎(chǔ)。雖然基于RSSI的測距定位在定位的精度和環(huán)境的選取時存在較大的限制和影響,但是由于模塊簡單易得及其本身提供的工具豐富,不需要額外的硬件和軟件,因此在定位測距方面依然具有比較高的價值和選取余地。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環(huán)球時報(2010-02-11)2010-02-11 13:34:15
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32