改進最小二乘法在永磁同步電機參數辨識中的應用
2022-07-21 06:10:12李祥功朱立軍
物聯網技術 2022年7期
李祥功,朱立軍,2,陳 猛
(1.沈陽化工大學 計算機科學與技術學院,遼寧 沈陽 110142;2.沈陽化工大學 遼寧省化工過程工業智能化技術重點實驗室,遼寧 沈陽 110142;3.中國科學院大學,北京 100049;4.中國科學院大學沈陽計算技術研究所,遼寧 沈陽 110142)
0 引 言
永磁同步電機(PMSM)因其結構簡單、功率密度大、效率高等優點,近年來一直被廣泛應用于工業領域,特別是一些需要精密控制的場合,比如數控機床、航空航天、電動汽車等。永磁同步電機通常采用基于矢量控制的閉環控制方法,在這種控制方法中準確了解電機的參數對電機的高性能所起的作用至關重要。然而永磁同步電機在運行過程中,其參數可能會隨著溫度、機器老化和環境條件而變化,從而導致機器性能下降甚至系統失穩。因此,精確地辨識永磁同步電機的參數成為了一項亟需解決的問題。
目前,國內外已有許多學者對永磁同步電機參數辨識問題展開了廣泛而深入的研究。參數辨識的方法主要分為兩種:離線辨識和在線辨識。離線辨識主要有DC電流延遲、AC靜態方法和矢量控制方法等,但是這類辨識方法需要在電機保持穩定狀態時進行,不適用于電機實際運行的場合,因此離線辨識電機參數的意義不大。在線辨識主要有最小二乘法及其拓展算法、模型參考自適應方法、遺傳算法以及群體智能優化算法、基于人工神經網絡的參數辨識方法、擴展卡爾曼濾波法等。文獻[4]提出了一種基于模型參考自適應控制理論的多參數識別方法,采用逐步參數辨識的方法以解決電壓方程秩缺陷問題。文獻[5]利用遺傳算法設計了一種電機多參數估計方法,然而該算法計算量大且需要較多的時間資源。文獻[6]將混沌人工魚群算法與BP神經網絡相結合,克服了BP神經網絡收斂過早的問題,具有一定的指導意義。
隨著數據的增長,遞推最小二乘法會出現“數據飽和”現象,使得新采集的數據對參數的估計值更新作用不大,當參數發生變化時,遞推最小二乘法就會無法跟蹤這種變化,從而導致在線辨識參數失敗。加入遺忘因子后的遞推最小二乘法實現了對數據的時變加權操作,削弱了過去觀測數據的作用,增強了新采集數據對參數辨識的更新作用,從而使算法的跟蹤能力進一步增強。然而,目前的研究大多采用固定遺忘因子的方式進行參數辨識,當遺忘因子設置過大時算法的跟蹤能力下降,趨近于1時退化為普通的遞推最小二乘法,當遺忘因子設置過小時算法的跟蹤能力得到提高,但是參數辨識結果又會出現較大的波動。
針對傳統辨識方法的不足,本文提出了一種可變遺忘因子的遞推最小二乘法的永磁同步電機參數辨識方法,該辨識方法在遞推最小二乘法的基礎上,加入可以動態變化的遺忘因子,提高了算法的跟蹤能力和穩態性,從而達到精確快速辨識的目的。
1 永磁同步電機模型
PMSM通常采用矢量控制的閉環控制方法,該方法通過坐標變換,將三相定子電流解耦為勵磁的直軸電流和產生轉矩的交軸電流,從而直接控制勵磁和轉矩。在-同步坐標系下,電壓方程可以表示為:

式中:u、u分別為、軸電壓;為定子電阻;i和i分別為、軸電流;L、L分別為、軸電感;ω為電機電角速度;ψ為永磁體磁鏈。
對于表貼式永磁同步電機,軸電感和軸電感相同,即L=L=L,所以可以將式(1)改寫為:

以、軸電流為狀態變量,式(2)可寫為:
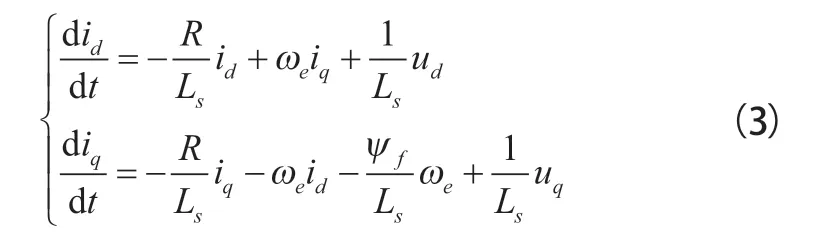
假設系統的采樣周期足夠小,可以將式(3)進行離散化處理,則有:

式中:表示系統運行時的第個時刻;為系統的采樣周期。為了同時辨識電機的、L、Ψ,選用式(5)進行算法的設計和計算,將式(5)簡化為最小二乘形式,則有:


由上式可知,通過采用帶遺忘因子的遞推最小二乘法,對待辨識矩陣實時在線辨識,即可求出永磁同步電機的定子電阻、電感、永磁體磁鏈。
2 最小二乘法理論
最小二乘法自1975年由高斯在形體運動軌道預報研究工作中提出,因其簡單易于理解的優點,得到了許多專家學者的支持和研究,被廣泛應用于系統參數估計中。隨著理論知識的不斷更新,又涌現出很多基于最小二乘法的擴展算法,例如遞推最小二乘法、遺忘因子遞推最小二乘法、遞推增廣法、偏差補償法等,這些方法都可以應用于線性定常系統以及包含時變參數的線性系統中。
2.1 遺忘因子遞推最小二乘法
當被辨識的參數發生突變時,傳統的遞推最小二乘法可以通過周期性地重置協方差矩陣來進行參數跟蹤。然而如果被辨識的參數變化緩慢,遞推最小二乘法就有其局限性,隨著數據量的增加,協方差矩陣和增益矩陣就會變得越來越小,對參數估計矩陣的修正能力下降,從而導致新采集的數據對參數估計的作用很小,最終導致實時參數辨識失敗。為了防止數據飽和帶來的參數遲滯問題,通常采用帶遺忘因子的遞推最小二乘法。取目標函數為:

式中:為參數估計的總次數;為參數估計的次數;為遺忘因子,一般取0.9~1。結合遞推最小二乘法的推導過程,其算法的迭代公式如下:

式中:(0)、 (0)一般需要提前確定。通常直接定義(0)=,為單位矩陣,為一個充分大的正實數,取值范圍在10~10之間; (0)=,取充分小的正實向量或零向量。
2.2 可變遺忘因子遞推最小二乘法
在固定遺忘因子的遞推最小二乘法中,遺忘因子常常被設置為固定不變的值,也就意味著對數據進行了時變加權,最新采集的數據用1加權,以前個采樣周期的數據用λ加權,不斷削弱過去采集數據的作用,增強當前新采集數據的作用。但是無論如何選擇遺忘因子的初值,算法的跟蹤能力和穩態性都無法保證是最優的,總是會犧牲一部分算法的能力。為了解決此問題,將遺忘因子動態函數化,則有:
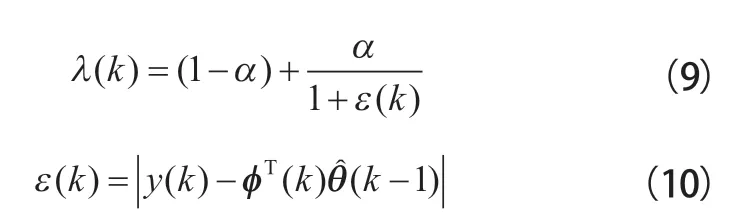
式中:為可調參數,其取值范圍為0.9≤<1;()為當前時刻實際模型和理論模型的差值,其大小與可變遺忘因子()直接相關,代表了參數辨識的性能好壞。當()=0時,()=1,算法退化為普通的遞推最小二乘法;當()較大時,()的值變小,參數辨識的跟蹤能力增強,使算法快速收斂,達到快速跟蹤參數變化的目的;當()的取值較小時,()的值增大甚至趨近于1,算法的跟蹤能力下降,同時穩定性得到提高。結合固定遺忘因子的遞推最小二乘法的遞推公式,該算法的迭代公式可以表示為:

3 仿真驗證
3.1 定參數仿真
對于永磁同步電機而言,經常采用矢量控制的方式建立閉環系統,加上參數辨識模塊就構成了如圖1所示的系統參數辨識框圖。其中位置和速度測量模塊用來獲取電機的轉速ω和轉子電角速度θ,轉速ω用于轉速環的反饋,轉子電角速度θ用于坐標變換。
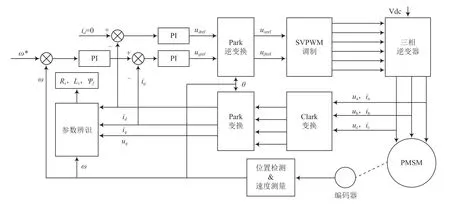
圖1 永磁同步電機參數辨識總體框架
為了測試永磁同步電機在恒定電機參數條件下參數辨識的效果,建立如圖1所示的仿真模型,其中PMSM模塊為Simulink集成的模塊,只能通過仿真運行前的靜態框進行離線設置,一旦仿真運行時,參數不可改變。PMSM的轉動慣量為0.003 kg?m,極對數為4,定子電阻為0.958 Ω,交直軸電感L和L均為8.5 mH,轉子磁鏈ψ為0.1 827 Wb,仿真時間為0.5 s,仿真步長為0.005 s。通過對算法和系統的仿真調試選取=0.96。首先電機以額定轉速啟動,0.2 s時突然施加2 N的負載,觀察變遺忘因子最小二乘法的辨識效果,如圖2所示。
由圖2可知,采用變遺忘因子遞推最小二乘法對PMSM的電阻、電感、磁鏈進行在線辨識,最終都能夠得到比較準確的結果。由于電感的估計值較小,在參數辨識的前期會出現較大的波動,在50步的時候收斂到穩定值。電阻和永磁體磁鏈辨識的結果幾乎接近預先設置的固定值,能滿足參數辨識的要求。
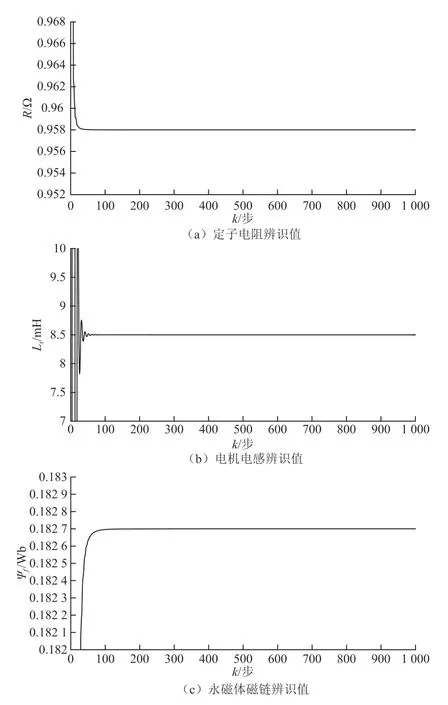
圖2 電機固定參數辨識結果
3.2 變參數辨識
根據文獻[10]提出的PMSM改進模型,采用自定義模型的方法建立電機的仿真模型,由電機的電壓方程和電磁轉矩方程,將PMSM模型用S-Function函數的方式來實現,采用i=0的矢量控制方法建立的仿真模型如圖3所示。

圖3 矢量控制方法仿真模型
在仿真實驗中,通過外部接入定子電阻、交直軸電感和永磁體磁鏈來設置PMSM的真實參數,實現參數可調化;通過仿真將運行時得到的電壓、電流等數據,保存到MATLAB的工作區間;然后經過編寫的參數辨識函數完成對電機參數的估計。其中遺忘因子動態函數中的取值要根據算法的跟蹤能力和抗噪聲的干擾能力進行考慮,通過對算法和仿真調試,最終選取遺忘因子動態函數中的為0.96。在仿真初始時刻,電機的各種參數設置為:=0.5 Ω,L=8.5 mH,ψ=0.17 Wb。
假設每次仿真過程中只改變一個參數值,在500步時參數值變化為=0.7 Ω,L=8.25 mH,ψ=0.19 Wb。
仿真設置RLS算法的協方差(0)為106,參數(0)為(10)[1, 1, 1],在仿真過程中加入均值為0、方差為0.5的正態分布信號,仿真時間為0.5 s,仿真步長為0.005 s,轉動慣量為0.001 kg?m,極對數為4。觀察RLS各種辨識算法的參數辨識效果,如圖4所示。其中RLS表示普通遞推最小二乘法,FFRLS表示遺忘因子固定不變的遞推最小二乘法,VFFRLS表示遺忘因子可變的遞推最小二乘法。
由圖4可知,當電機的參數在500步的時候發生變化,普通的RLS算法由于受到數據飽和的影響,隨著步數的增大,新采集的數據對參數估計值()的更新作用不大,從而導致RLS算法無法及時地跟蹤參數變化后的值,最終實時估計參數失敗。而VFFRLS算法和FFRLS算法都能快速跟蹤參數的變化,經過800步的遞推,參數的估計值都非常接近真實值,在遞推的過程中可以明顯地觀察到VFFRLS算法的收斂速度比FFRLS算法更快,可見通過對遺忘因子的動態調整能夠有效地提高算法的收斂速度,穩態精度也滿足系統的要求,進一步提高了算法的跟蹤能力和穩定性。
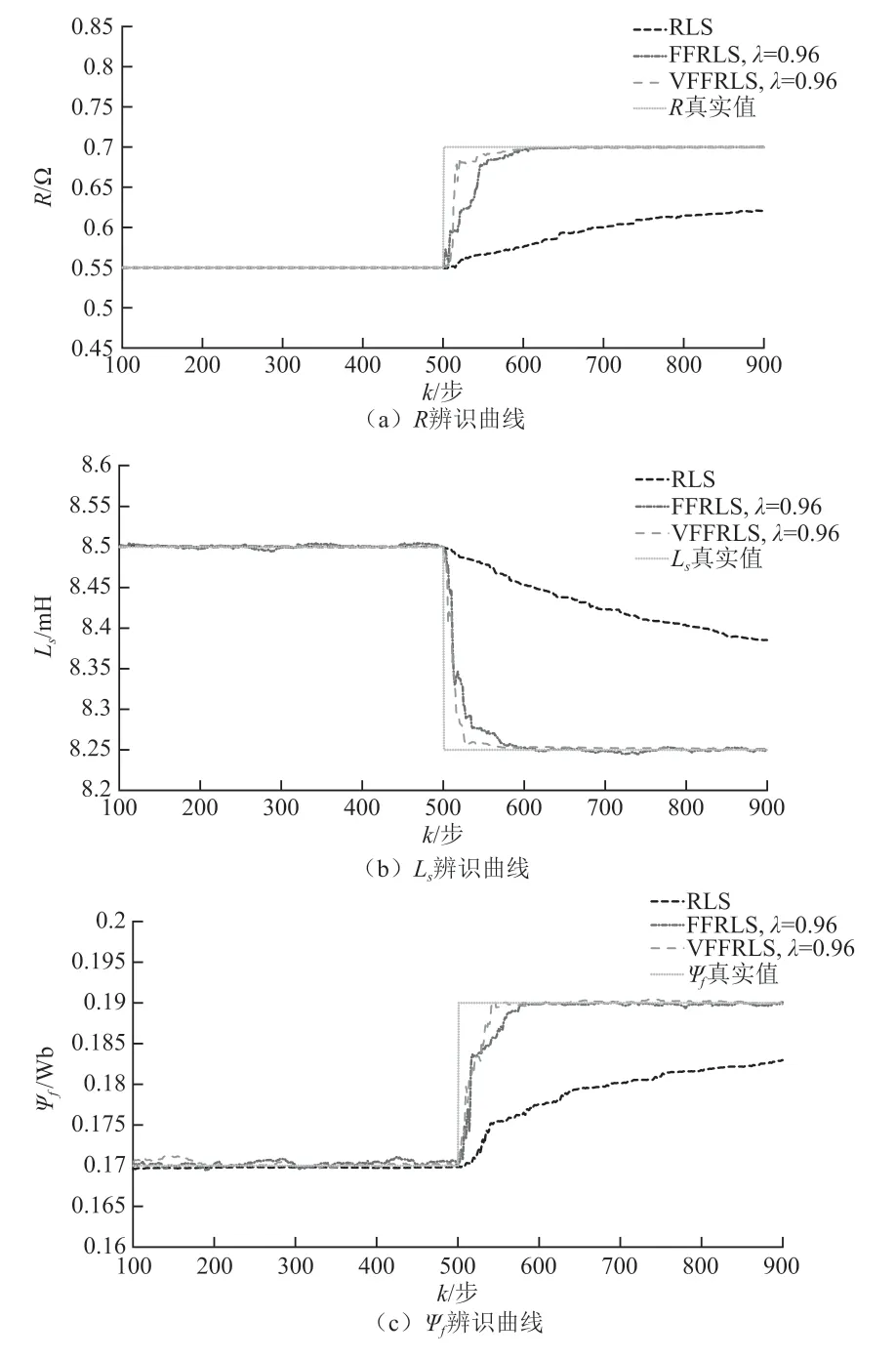
圖4 電機參數可變辨識結果
4 結 語
本文在傳統的遞推最小二乘法的基礎上,提出了可變遺忘因子遞推最小二乘法辨識算法,實現了對永磁同步電機定子電阻、電感和永磁體磁鏈的在線估計。根據實際的模型和理論模型的差值,建立動態變化的函數,實時調整()的取值,有效地解決了傳統RLS算法出現的數據飽和問題。仿真結果表明,改進的RLS算法與傳統的最小二乘法和帶遺忘因子的遞推最小二乘法相比,收斂速度更快,具有較好的動態跟蹤性能,兼顧了算法的收斂速度和辨識精度,進一步提高了算法的綜合性能。
注:本文通訊作者為朱立軍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56