基于并行交換的增強粒子群優(yōu)化算法在氣動優(yōu)化中的應用
2022-07-21 14:47:14王培君夏露周文碩欒偉達
西北工業(yè)大學學報 2022年3期
關鍵詞:優(yōu)化
王培君, 夏露, 周文碩, 欒偉達
(西北工業(yè)大學 航空學院, 陜西 西安 710072)
隨著計算流體力學(CFD)技術的不斷發(fā)展,氣動設計中CFD的占比逐漸提升,數(shù)值優(yōu)化方法已成為飛行器氣動外形設計中的一個重要組成部分。在各類優(yōu)化方法中,啟發(fā)式算法表現(xiàn)出了十分強大的尋優(yōu)能力。目前較常用的有以粒子群優(yōu)化(particle swarm optimization,PSO)算法[1]、蟻群算法(ant clony optimization,ACO)、布谷鳥搜索算法(cuckoo search algorithm,CSA)[2]為代表的群集智能算法,和以差分進化算法(differential evolution,DE)[3]、遺傳算法(genetic algorithms,GA)為代表的進化算法。其中PSO算法簡單方便、收斂速度較快,對許多問題都有較好的優(yōu)化效果,但是其更新公式會導致粒子被吸引在當前全局最優(yōu)解附近,搜索空間被大幅壓縮,分散度下降從而導致算法陷入局部最優(yōu)[4]。CSA算法是一種全局尋優(yōu)能力較強的算法,較強的搜索隨機性極大提升了該算法的全局搜索能力,但是CSA也存在收斂速度慢的問題。DE算法主要通過差分變異操作來生成新的變異個體,再通過交叉和選擇得到新的種群個體,貪婪選擇策略使其有較強的局部搜索能力,但也容易陷入局部最優(yōu)。由此可見,有的算法不擅長全局搜索,容易陷入局部最優(yōu);有的算法不擅長局部搜索,搜索效率低,在單峰問題中表現(xiàn)差。所以如何補足短板,使算法適應更多形式問題,增強算法的魯棒性是一個難題。
為了提高啟發(fā)式算法的魯棒性,已經(jīng)有了很多改進措施,比如借鑒其他算法優(yōu)秀思想對算法更新公式進行改進或在一個種群內(nèi)通過一定策略使用多種更新公式;對種群拓撲結構進行改進[5],改善種群多樣性;還有通過多個種群并行,再利用某種信息交換機制來提高全局搜索能力。其中對算法更新公式進行改進和單一種群內(nèi)使用多個更新公式的方法改善了原算法搜索模式,但是其搜索模式仍有很大相似度,原算法的短板無法得到有效提升。種群拓撲方法提高了算法全局性能,但是由于算法更新公式并未改變,所以魯棒性提高不顯著。而多種群并行中的分層交換[6]的方法將2種不同算法有機結合起來,共享最優(yōu)信息,互相引導,取長補短,可以較好改進全局搜索能力。李丁等[6]通過分層交換操作將PSO和DE這2種容易陷入局部最優(yōu)的算法結合起來得到了RADPSO算法,新算法魯棒性得到了較大提升,體現(xiàn)了分層交換操作的有效性。但是限于其使用的PSO和DE算法在很多情況下無法得到較優(yōu)解,所以該算法在有些多峰問題中仍會陷入局部最優(yōu),其魯棒性仍有較大提升空間。
為了提高PSO算法魯棒性,本文選擇將PSO種群與其他算法種群進行并行,然后進行分層交互操作,其中選擇什么算法種群進行并行至關重要。科研人員通常借鑒全局性較好的算法對粒子群優(yōu)化算法進行改進。石季英等[7]構建了PSO-CS混合算法,其核心是將PSO算法每輪迭代后個體歷史最優(yōu)位置進行CSA算法位置更新,新算法全局搜索能力雖提升有限,但是說明了通過CSA算法來提升PSO算法全局尋優(yōu)能力是可行的。鑒于此,如果通過使用分層交換操作來引入CSA算法,那就可以通過改善算法全局尋優(yōu)能力來達到高魯棒性。故本文提出了基于并行交換的增強粒子群優(yōu)化算法(enhanced particle swarm optimization based on parallel excha-nge,EPSOBPE)。該算法首先借鑒差分進化的變異行為對粒子群優(yōu)化算法進行增強,在不減少全局收斂性的基礎上加強快速收斂能力。然后通過讓增強后的粒子群與布谷鳥種群進行并行運行,每次迭代后進行分層交換,使二者種群可以有機結合起來,共享最優(yōu)信息的同時增加種群多樣性,以達到增強算法魯棒性的目的。
1 優(yōu)化算法
1.1 粒子群優(yōu)化算法
粒子群優(yōu)化算法[1]是通過群體中的個體互相協(xié)助和群體最優(yōu)信息共享來探索最優(yōu)解的。粒子群中每個粒子都有一個初始速度和適應度值,個體在迭代過程中根據(jù)自身經(jīng)歷過的最佳位置以及種群得到的最優(yōu)解的位置來生成速度,再根據(jù)目前位置和生成的速度來得到新的在空間中的位置[1]。粒子群優(yōu)化算法的數(shù)學描述如(1)式所示
式中,下標i和j分別代表的是第i個粒子與維度的第j維,上標t代表迭代代數(shù)。ω為慣性權重因子;c1,c2為學習因子;r1和r2是介于[0,1]之間的隨機數(shù)。
粒子群算法綜合能力較強,但因為更新公式導致粒子被限制在當前全局最優(yōu)解附近,在很多情況下搜索空間會被壓縮,使得搜索過早停滯,最終導致算法在大部分情況下無法獲得較好的結果。而布谷鳥算法憑借萊維飛行這種長短步相間的操作使其不會出現(xiàn)搜索空間被壓縮的情況,有較強的全局搜索能力。
1.2 布谷鳥搜索算法
布谷鳥搜索算法(CSA)[2]中有2種更新位置的方式,一種是布谷鳥尋找鳥窩下蛋的尋找路徑采用了萊維飛行。萊維飛行的主要特點是長短步相間,采用萊維飛行更新位置的公式如下
Xt+1=Xt+α?Levy(β)
(3)
式中:α是步長縮放因子;Levy(β)是萊維隨機路徑;?是點乘運算。其中生成服從萊維隨機步長的公式使用Mantegna方法,公式如(4)式所示
(4)
式中,u~N(0,σ2),v~N(0,1),其中σ如下所示
(5)
式中:β∈[1,3],本文β取1.5;α是步長縮放因子,在布谷鳥算法中針對α有不同的變種,本文中α取值如(6)式所示
(6)
式中:Xi與Xj是任意不同鳥窩的位置;D為問題自變量維數(shù)。
另一種位置更新方式是宿主鳥以一定概率Pa發(fā)現(xiàn)外來鳥后重新建窩的位置路徑,這個路徑可以采用萊維飛行或偏好隨機游動方式,本文使用偏好隨機游動方式,更新位置公式如(7)式所示
Xt+1=Xt+r?Heaviside(Pa-ò)?(Xi-Xj)
(7)
式中:r,ò是服從均勻分布的隨機數(shù);Heaviside是跳躍函數(shù)(x>0,y=1;x<0,y=0)。
布谷鳥搜索算法通過萊維飛行可以較大程度上保證樣本的多樣性,但是也導致其局部搜索能力相對于PSO和DE較差,收斂速度慢,魯棒性也較差。
1.3 基于并行交換的增強粒子群優(yōu)化算法
PSO算法前期收斂速度快,后期種群多樣性的消失使其容易陷入局部最優(yōu),而CSA算法的萊維飛行使其全局搜索能力較強,但收斂速度慢,缺少活力。二者魯棒性均較差,但是各有優(yōu)點,為了獲得一個魯棒性較強并兼具二者優(yōu)點的算法,提出了基于并行交換的增強粒子群優(yōu)化算法(EPSOBPE)。
在EPSOBPE中,由于CSA種群分走了一部分粒子數(shù)量,需要對粒子群種群進行增強,在保證全局搜索能力的前提下加速收斂,所以利用差分進化中的突變操作對粒子群全局最優(yōu)解進行學習。

(8)
式中,r1,r2,r3,r4∈[1,N]的整數(shù),N為粒子數(shù)量,且r1≠r2≠r3≠r4,g為粒子群全局最優(yōu)解,F(t)為比例因子。
為了使算法在前期具有一定的全局搜索能力避免快速收斂陷入局部最優(yōu),所以前期選擇開關T值應稍小,F應稍大,使得早期使用增強學習的粒子數(shù)量較少,使用增強學習的粒子得到的擾動更大,后期使用增強學習策略的粒子較多,使用增強學習的粒子得到的擾動較小,加速收斂,得到最優(yōu)解。T與F更新公式如(9)~(10)式所示

(9)

(10)
式中,Gmax為最大迭代輪數(shù)。
采用增強學習策略,既可保證算法收斂,又可防止算法早熟。優(yōu)化前期,粒子之間距離較遠,差分變化較大,引入的擾動更強,粒子不會過早地聚集在g周邊,粒子分散度大,探索能力強,對空間搜索更為充分;優(yōu)化后期,粒子相互靠近,差分變化減小,粒子向g聚集,加速收斂。增強學習策略流程圖如圖1所示。R表示均勻分布在[0,1]區(qū)間的隨機數(shù)。
由于在氣動優(yōu)化問題中,最優(yōu)解一般位于部分維度的邊界上,所以有必要對邊界處理進行改進,故在邊界處理中采用了減幅的處理方法,即當粒子位置超出了邊界后,粒子的位置仍然重置于邊界x上,但x方向的速度以一個隨機大小相反方向返回到邊界內(nèi),如圖2所示,r表示均勻分布在[0,1]區(qū)間的隨機數(shù)。
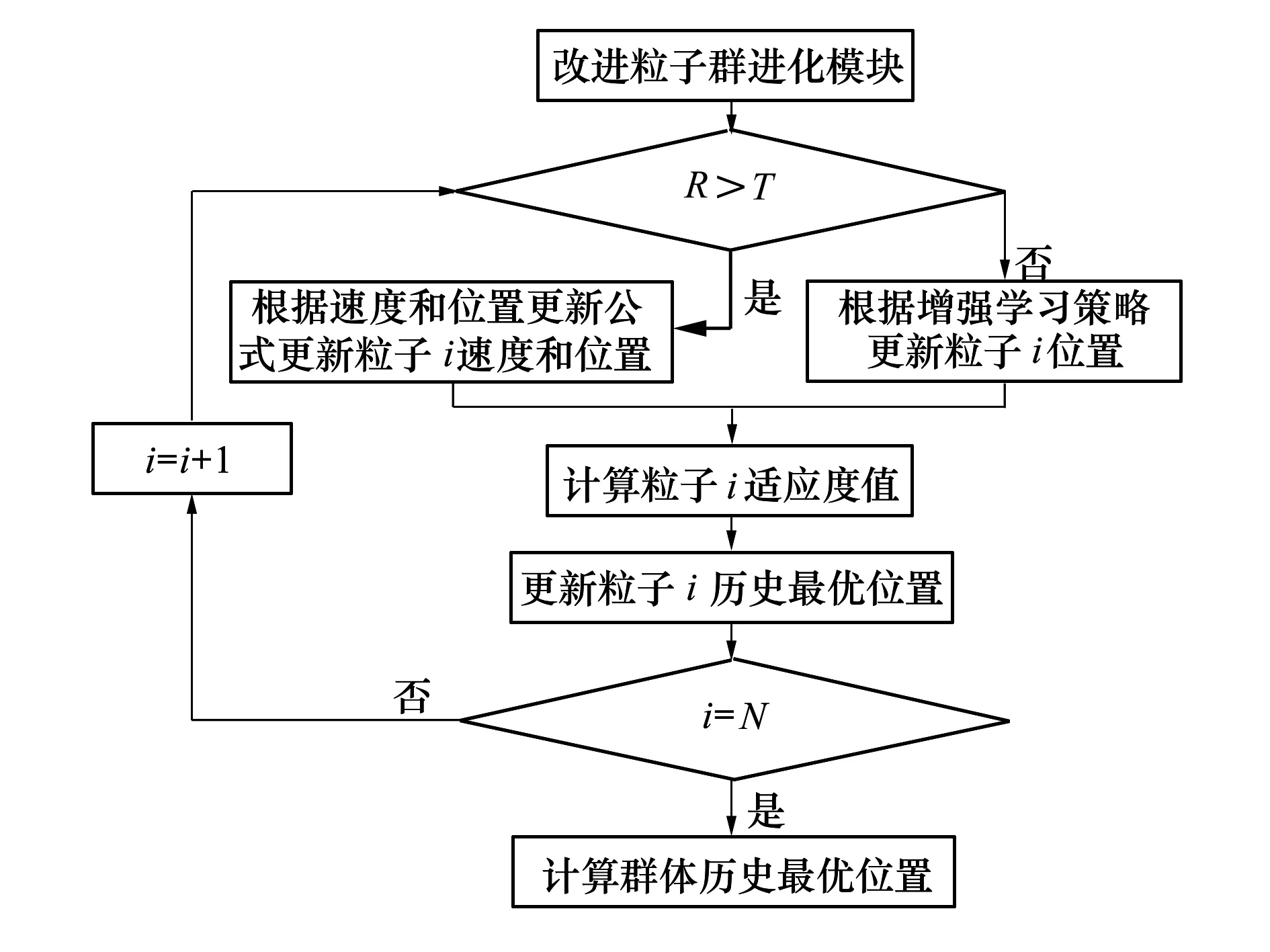
圖1 增強學習策略流程圖
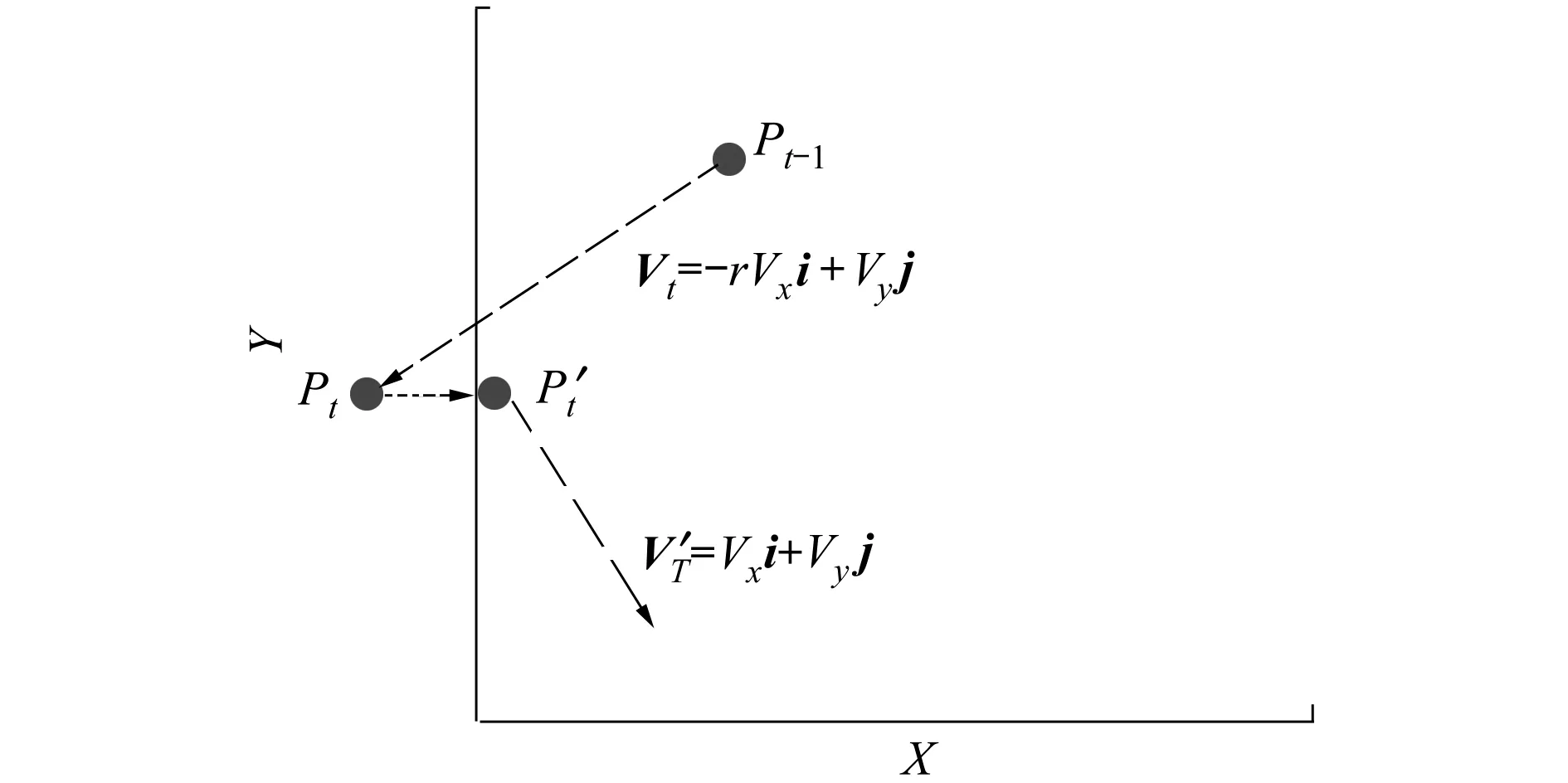
圖2 速度減幅邊界處理
EPSOBPE算法策略是一種種群并行策略,2種算法分別使用改進后的PSO和CSA算法。改進后PSO算法雖然通過增強學習策略增強了局部搜索能力和收斂速度,但是在很多情況下仍不可避免陷入局部最優(yōu)。CSA算法有著較強的全局搜索能力,但是收斂能力較差,所以通過分層交換策略將2種算法取長補短,共享二者優(yōu)勢信息使算法具有較強魯棒性,而且既可以快速收斂,也可以保證其全局搜索能力。新算法沒有通過只改進更新公式或改進種群拓撲結構來增強算法魯棒性,而是使用多種群并行與分層交換機制。這點與其他改進算法有較大差別,有效提高了新算法的魯棒性,使新算法在面對不同類型問題時可以獲得更好的解。
EPSOBPE算法的具體步驟如下:
1) 對算法進行初始化,給定相關參數(shù)。
2) 將整個大種群等分成2個種群,分別運行改進PSO算法和CSA算法。
3) 在一輪后得到2個種群的函數(shù)最優(yōu)值后進行比較,選出最優(yōu)者。
4) 更新種群的最優(yōu)值并進行替換,用最優(yōu)者替換改進PSO種群中的最優(yōu)者,或CSA種群中任意一個個體。
5) 對改進PSO種群進行一次分層,即求出改進PSO群體中所有個體的平均適應度值FPSO 1;對CSA種群進行一次分層,即求出CSA群體中所有個體的平均適應度值FCSA 1。
6) 對改進PSO種群進行二次分層,即求出改進PSO群體中適應度值優(yōu)于FPSO 1的所有個體的平均適應度值FPSO 2;對CSA種群進行二次分層,即求出CSA群體中適應度值優(yōu)于FCSA 1的所有個體的平均適應度值FCSA 2。
7) 判斷FPSO 2是否優(yōu)于FCSA 2,若滿足,用PSO群體中適應度值優(yōu)于FPSO 2的個體替換CSA群體中適應度值較差的那些個體;若不滿足,用CSA群體中適應度值優(yōu)于FCSA 2的個體替換PSO群體中適應度值較差的那些個體。
8) 判斷是否滿足停止準則,若滿足,則結束,若不滿足,則轉至步驟2)。
本文在PSO算法的基礎上首先進行了增強行為,增強了PSO算法的局部搜索能力;同時修改了邊界處理方法。然后通過分層交換策略引入CSA算法,來增強PSO算法的全局尋優(yōu)能力,最終獲得了具有強魯棒性的EPSOBPE算法。
2 函數(shù)測試
為了測試EPSOBPE算法性能,本文對PSO算法,DE算法,CSA算法,EPSOBPE算法和RADPSO算法[6]進行比較,測試函數(shù)[8]如表1所示,函數(shù)具體設置可參考文獻[8]。
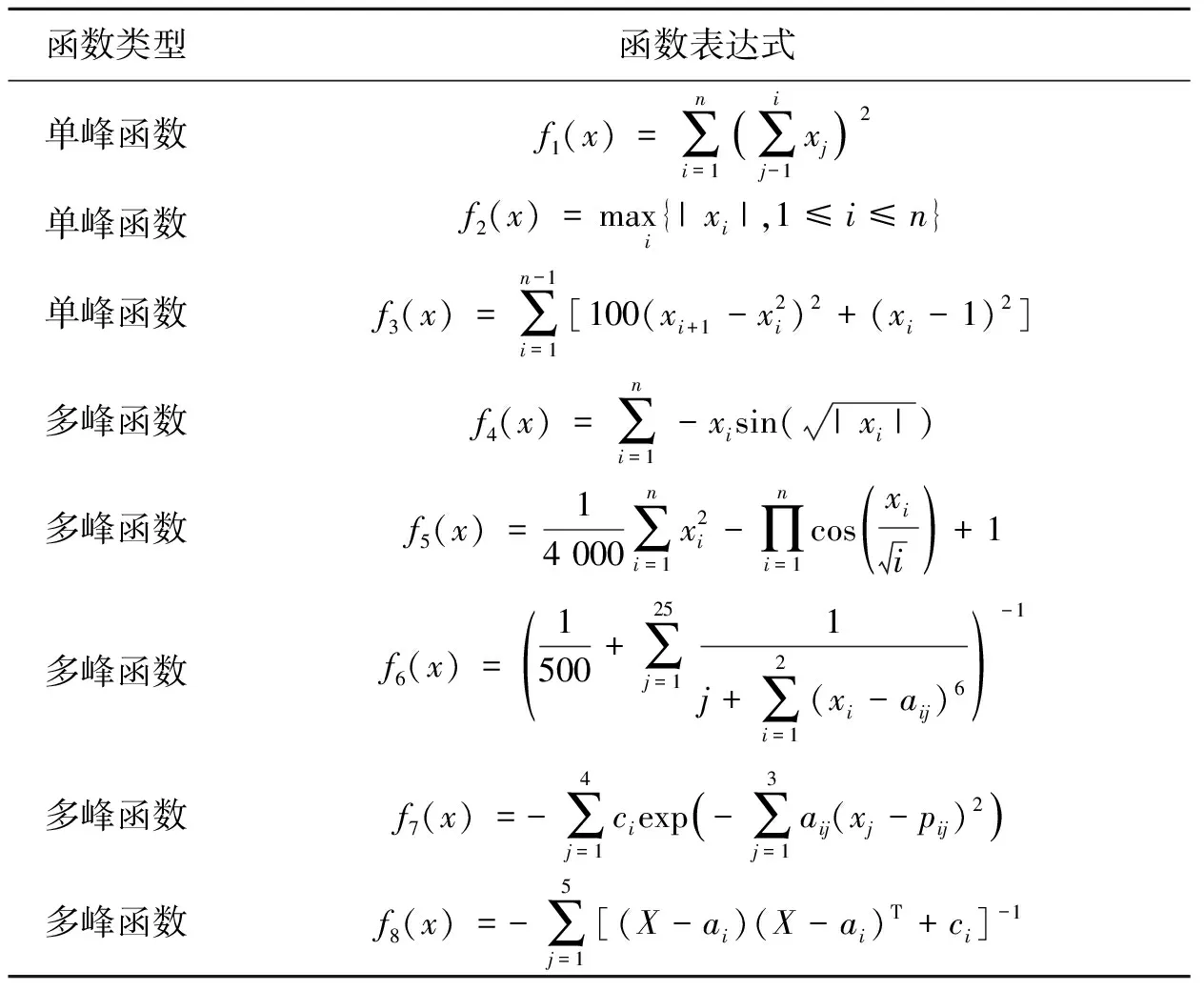
表1 測試函數(shù)
由于測試函數(shù)維度不同,故不同維度算法種群個數(shù)也不同,具體設置如表2所示。
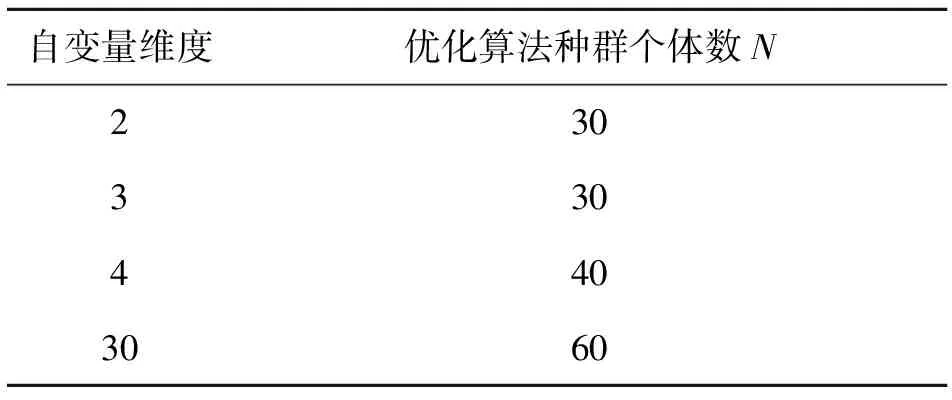
表2 算法設置
在函數(shù)測試中,每個算法計算30次,結果取30次平均值。PSO算法中C1=C2=2,慣性權重因子ω隨進化代數(shù)由0.9線性遞減到0.4[9]。DE算法交叉因子CR=0.7,縮放因子F=0.5。RADPSO算法參數(shù)取上述PSO算法和DE算法的參數(shù)。CSA算法中Pa=0.25。EPSOBPE算法的設置同上述PSO算法和CSA算法具有相同設置,縮放因子F從0.7線性遞減至0.3,T從0.3線性遞增至0.7。每次尋優(yōu)中算法收斂條件為調(diào)用函數(shù)次數(shù)達到100×D×N。表3展示了不同算法30次運行結果的均值和標準差。
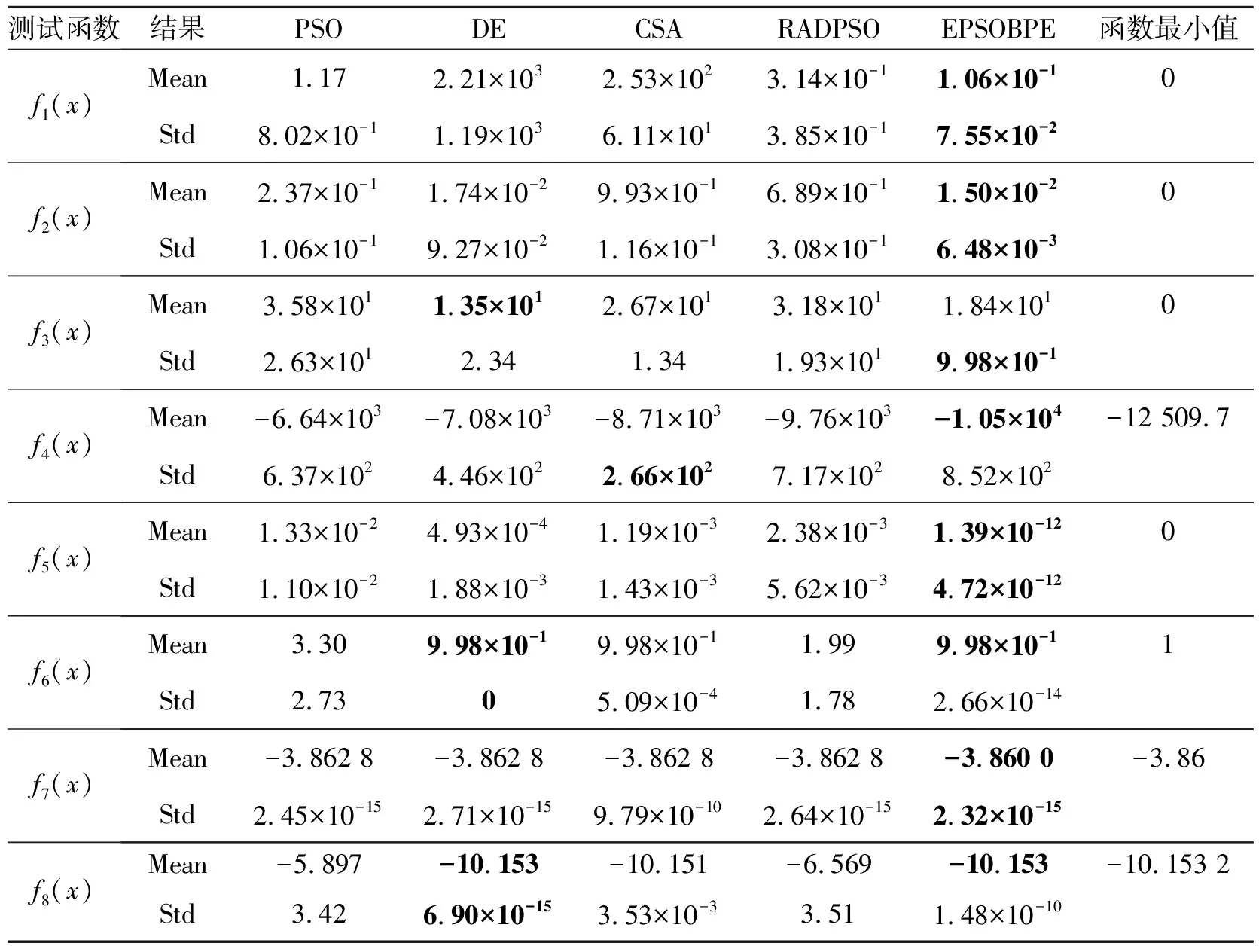
表3 函數(shù)測試的算法性能
由表3可見,EPSOBPE算法在3個單峰函數(shù)中的尋優(yōu)效果并沒有因為執(zhí)行粒子群優(yōu)化算法的個體數(shù)減少而變差,在單峰函數(shù)中得到的結果都較好,體現(xiàn)了對PSO進行增強是十分有效的。但是對于測試函數(shù)f3(x),EPSOBPE算法并沒有獲得最好的尋優(yōu)結果,這是主要是因為測試函數(shù)f3(x)具有一定的峽谷特征,如圖3所示優(yōu)化算法很容易在峽谷中陷入停滯。
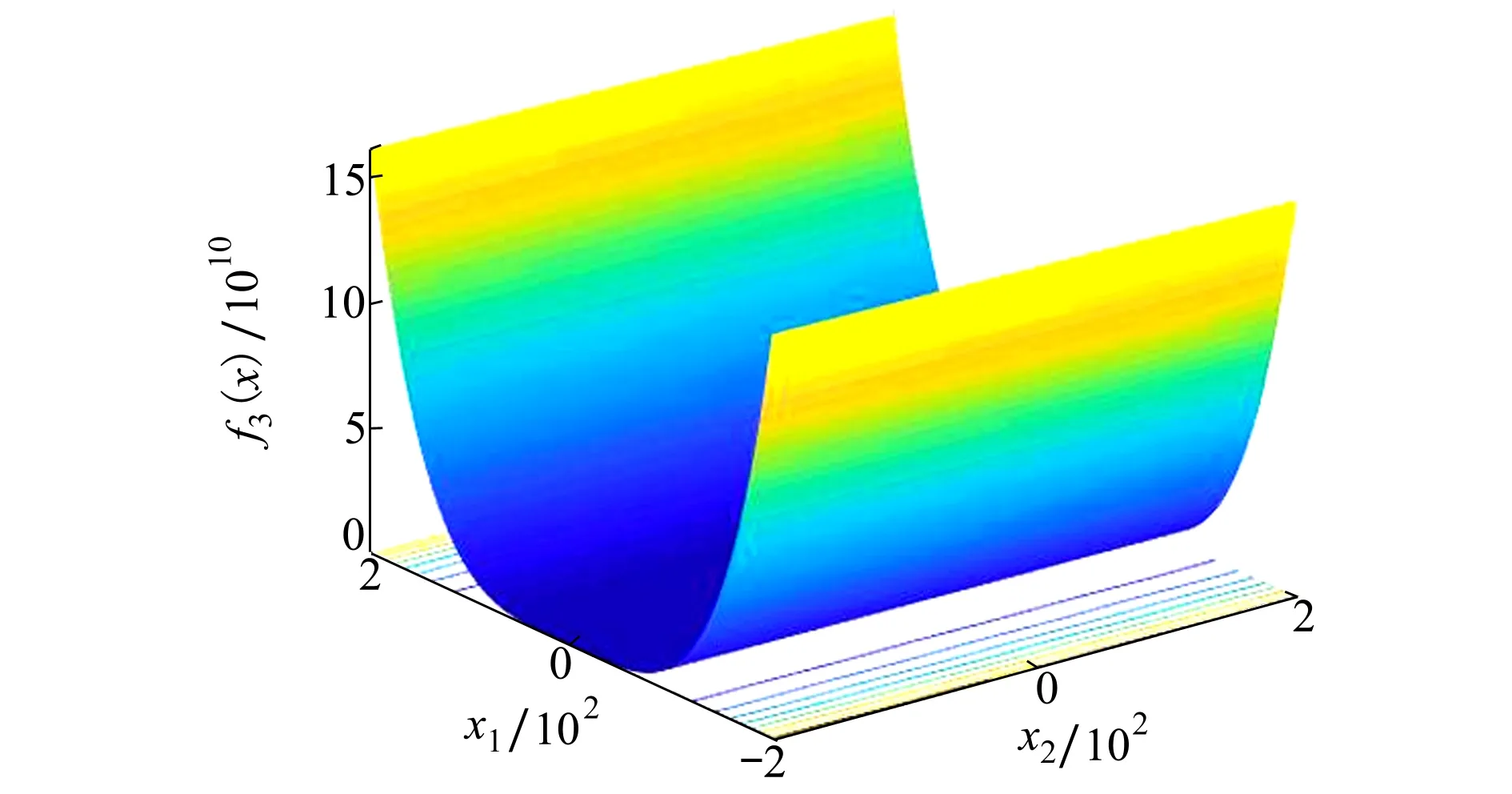
圖3 2-Df3(x)函數(shù)示意圖
同時該函數(shù)的峽谷特征正好與坐標軸相匹配,此時DE算法的變異操作可以更好地進行搜索,EPSOBPE算法由于加入了增強學習策略,在一定程度上增強了此類函數(shù)的尋優(yōu)能力, 但是由于并不是所有粒子都會使用增強學習策略,所以EPSOBPE算法在此測試函數(shù)的表現(xiàn)上僅次于DE算法。
在之后5個多峰函數(shù)中EPSOBPE算法由于使用了增強PSO與CSA并行并進行分層交換,體現(xiàn)出了極強的全局尋優(yōu)能力,同時,得到的標準差也較低,具有很強的穩(wěn)定性。由于EPSOBPE算法在更新公式上與PSO和CSA算法較為相似,分層交換操作并不復雜,所以在計算時間方面與其余算法相似。EPSOBPE算法在不同維度不同種類的函數(shù)測試均表現(xiàn)良好,這體現(xiàn)出了EPSOBPE算法相較于其他算法的魯棒性更強,能夠適應不同種類的函數(shù),同時具有更好的尋優(yōu)能力。
3 翼型氣動優(yōu)化設計
3.1 翼型CFD算例驗證
本文CFD二維算例驗證采用經(jīng)典算例RAE 2822跨音速流場數(shù)值模擬,該算例被廣泛應用于二維CFD計算校核。該算例選取設計狀態(tài)為自由來流馬赫數(shù)Ma=0.73,雷諾數(shù)Re=6.5×106,迎角α=2.85°,設計升力系數(shù)CL=0.8。在CFD計算后與試驗數(shù)據(jù)[10]結果進行對比。二維算例的網(wǎng)格量為3萬,遠場距離翼型表面40倍弦長。本文二維翼型計算時湍流模型選用k-ωSST湍流模型。
圖4展示了數(shù)值模擬結果與試驗值的壓力分布對比。從圖4可以看出,數(shù)值模擬所得壓力分布與試驗結果基本吻合,能夠較為準確地捕捉激波的位置和強度。這說明本文采用的CFD數(shù)值計算方法在求解二維翼型的氣動特性中具有較高的數(shù)值模擬精度。
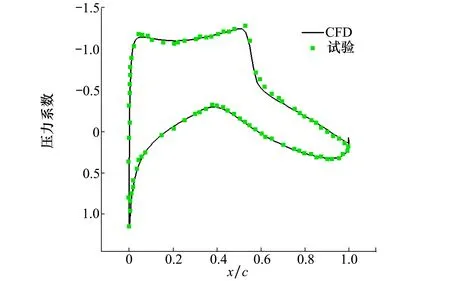
圖4 翼型壓力分布對比
3.2 翼型優(yōu)化模型
考慮到在工程中,翼型均有后緣厚度,故翼型氣動優(yōu)化設計的初始翼型為修改成鈍后緣的RAE2822翼型,設計狀態(tài)為M∞=0.73,Re=6.5×106。 巡航狀態(tài)下翼型應有優(yōu)秀的低阻力系數(shù)CD、小低頭力矩系數(shù)CM特性,且升力系數(shù)CL應基本保持不變,同時還應考慮結構布置和機翼油箱容積等問題。故而優(yōu)化目標及約束如下
(11)
式中:A為翼型圍成的面積;tmax為翼型最大厚度;角標0為初始翼型相關參數(shù)。
翼型參數(shù)化使用擾動CST方法[11-12],設計變量為12個,翼型上下表面各6個。分別采用CSA算法、DE算法、EPSOBPE算法、PSO算法和RADPSO算法進行翼型優(yōu)化設計,各算法種群個體數(shù)均為24,其余參數(shù)與函數(shù)測試中參數(shù)設置相同。
CFD設置與算例驗證相同,采用k-ωSST湍流模型,網(wǎng)格數(shù)量為3萬。二維翼型優(yōu)化用計算機CPU為Intel(R) Core(TM) i7-10700F CPU,內(nèi)存為32 GB。由于算法調(diào)用CFD求解器次數(shù)過多所以使用基于Kriging代理模型[13]的優(yōu)化方法。
本文使用的基于Kriging代理模型的優(yōu)化方法是首先使用拉丁超立方抽樣方法(Latin hypercube sampling,LHS)生成少量的樣本點構建初始代理模型,然后通過使用優(yōu)化算法來求解加點帶來的優(yōu)化子問題得到新的樣本坐標,將新樣本加入樣本庫后再次構建代理模型,進行代理模型的更新,直到滿足收斂條件。二維翼型優(yōu)化問題中初始樣本點數(shù)為240,使用混合加點方式[14]加點200個,共440次CFD計算。
混合加點方式是先使用最大改善期望(expected improvement,EI)加點準則,當E[I(x)]<0.01min(F(x))時使用最小預測值(minimize prediction,MP)加點準則。
EI加點準則選取改善期望最大的設計點作為加點位置。設計點x處的改善值表示為I(x)=ymin-y(x),改善期望為
(12)
式中,φ為標準正態(tài)分布的概率密度函數(shù)。對(12)式使用分部積分可得
E[I(x)]=σ(x)[uΦ(u)+φ(u)]
(13)

MP方法直接使用代理模型預測值作為目標值進行尋優(yōu),把尋優(yōu)得到的具有最小預測值的設計點作為加點位置。
3.3 優(yōu)化結果及其分析
圖5和圖6給出了優(yōu)化迭代記錄及優(yōu)化前后幾何形狀與壓力系數(shù)分布。
表4給出了優(yōu)化后翼型的性能參數(shù)比較。

圖5 翼型優(yōu)化迭代記錄圖6 翼型幾何形狀與壓力系數(shù)比較
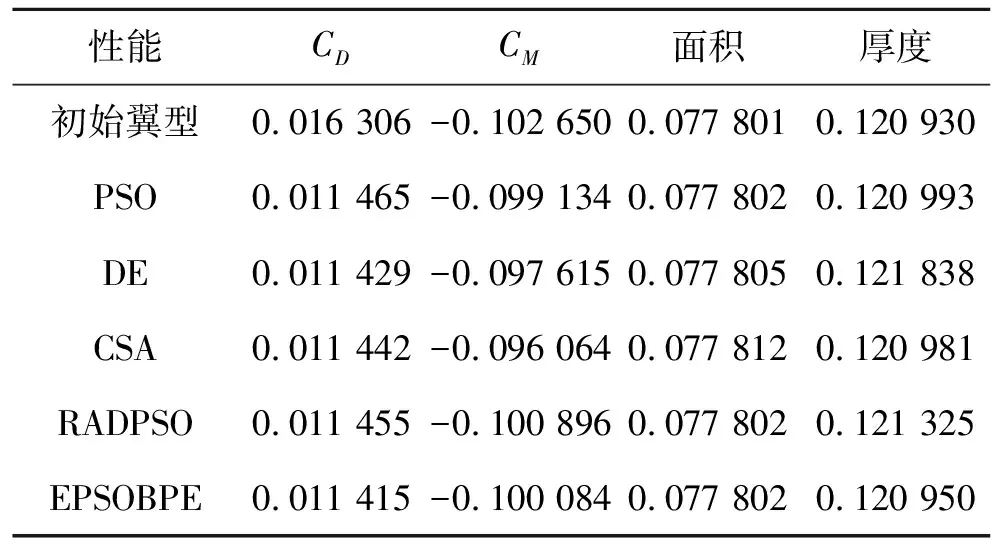
表4 翼型優(yōu)化結果比較
由圖5可知,幾種優(yōu)化算法的收斂速度類似,但是接近收斂時,EPSOBPE算法的結果更好,體現(xiàn)了EPSOBPE算法有著更好的魯棒性,所以可以更好地找到每次代理模型中獲得最大改善的點或阻力系數(shù)最小的點。由圖6可見,優(yōu)化后的翼型上表面頂點后移,最高點有所下移,下表面頂點后移,最低點下移量與上表面最高點下移量相似。壓力系數(shù)方面,優(yōu)化后的前緣吸力峰峰值有所增大,為了保持升力,翼型上表面前部和后部的壓力系數(shù)有所減少,中部消除了激波,壓力系數(shù)過渡更為平滑,但也導致壓力系數(shù)絕對值減少。翼型下表面壓力系數(shù)與初始值相似。在優(yōu)化后的翼型中,經(jīng)過PSO優(yōu)化的翼型與其他算法優(yōu)化的翼型相差較大,其阻力系數(shù)也在優(yōu)化后的翼型中最大,說明其陷入了局部最優(yōu),體現(xiàn)了PSO算法較差的魯棒性。在其余算法中EPSOBPE算法得到的結果在厚度和面積上更接近初始翼型的值,且結果的阻力系數(shù)是最小的,說明EPSOBPE優(yōu)化后得到的結果更接近最優(yōu)解。EPSOBPE算法正如上文分析的一樣,具有極強的魯棒性,面對不斷變換的代理模型所帶來的子優(yōu)化問題,可以獲得更好的解。
4 機翼氣動優(yōu)化
4.1 機翼CFD算例驗證
本文三維算例采用的是經(jīng)典三維驗證算例,ONERA M6機翼[15]流場的數(shù)值模擬算例。該算例被廣泛應用于三維CFD計算校核。該算例的氣動設計狀態(tài)為Ma=0.839 5,迎角α=3.06°,雷諾數(shù)Re=1.172×107。該算例的計算網(wǎng)格量為108萬。本文三維機翼計算時湍流模型選用k-ωSST湍流模型。
圖7展示了0.44倍和0.9倍展向位置處截面下的數(shù)值模擬結果與試驗值的壓力分布對比,其中,y表示截面處位置距離機翼根部的長度,b表示機翼展長。結果表明數(shù)值模擬所得壓力分布與試驗結果基本吻合,并能夠較為準確地捕捉激波的位置和強度。這說明本文采用的 CFD 數(shù)值計算方法在求解三維機翼的氣動特性中具有較高的數(shù)值模擬精度。

圖7 y/b=0.44與y/b=0.9截面處的壓力分布
4.2 機翼優(yōu)化模型
以M6機翼為初始機翼,分別采用CSA算法、DE算法、EPSOBPE算法、PSO算法和RADPSO算法進行機翼優(yōu)化設計,各算法種群個體數(shù)均為58,其余參數(shù)與函數(shù)測試中參數(shù)設置相同。CFD計算參數(shù)設置與算例驗證相同,網(wǎng)格與算例驗證時相同均為108萬。三維機翼優(yōu)化用計算機CPU為2個Intel(R) Xeon(R) Gold 6248R,內(nèi)存為256 GB。由于三維流場計算時間較長所以使用基于Kriging代理模型的優(yōu)化方法。優(yōu)化方法流程與二維翼型優(yōu)化流程相同。三維機翼優(yōu)化初始樣本點數(shù)量為300,采用混合加點方式,加點數(shù)量為300。參數(shù)化方法使用自由變形方法(free-form deformation,FFD)[16],本文通過改變翼根與翼梢2個控制截面處的控制框點在Z方向上的位置實現(xiàn)對外形的改變,每個控制截面翼型上下表面各7個控制點,再對翼尖在XOY平面方向內(nèi)設置1個扭轉角的控制變量,綜上,該算例模型共使用29個設計變量。
機翼優(yōu)化設計狀態(tài)為M∞=0.839 5,Re=11.72×106。優(yōu)化目標為阻力系數(shù)CD最小化,約束為保持升力系數(shù)CL不變以及翼根厚度tr與翼尖厚度tt不減小。可得公式如下
(14)
4.3 優(yōu)化結果及其分析
圖8展示了優(yōu)化過程中樣本中最小阻力系數(shù)的收斂過程,表5給出了M6機翼最終的優(yōu)化結果。
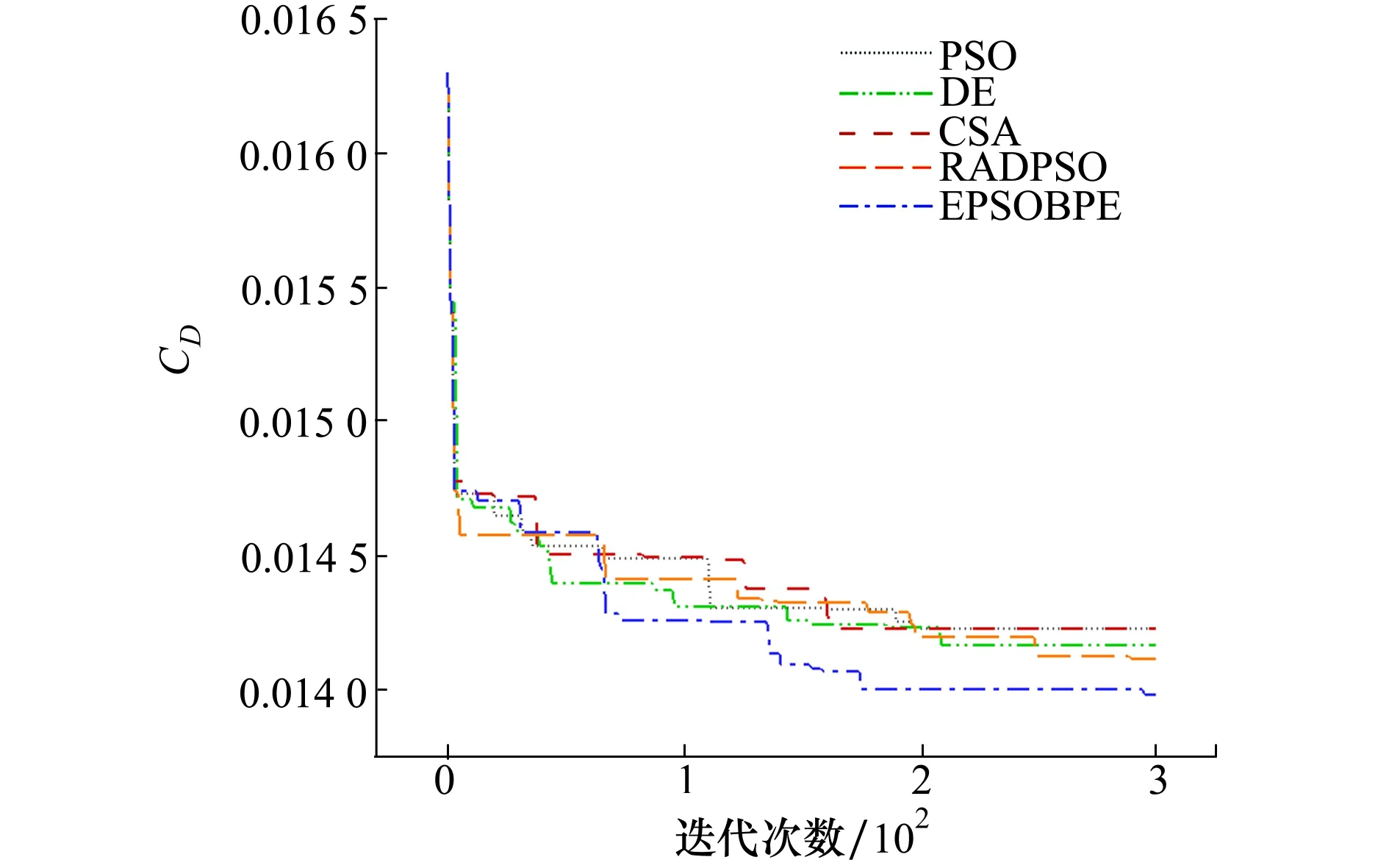
圖8 機翼優(yōu)化迭代記錄
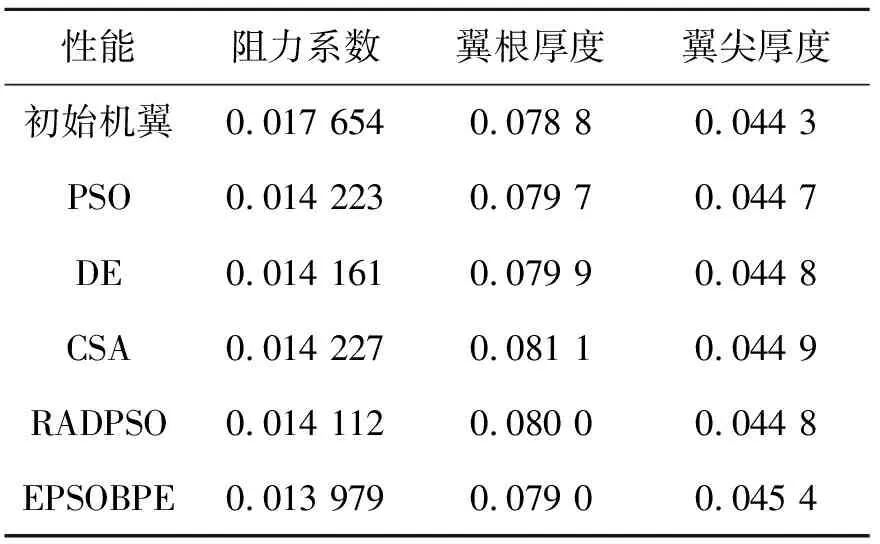
表5 機翼優(yōu)化結果對比
由圖8可知, EPSOBPE算法在較高維度的優(yōu)化中可以適應不斷變化的子優(yōu)化問題,提高了優(yōu)化收斂速度,體現(xiàn)了EPSOBPE算法的魯棒性較強,最終可以得到與其他算法相比更好的優(yōu)化結果。由表5可知,相同計算量下通過使用EPSOBPE算法,阻力系數(shù)從0.017 654降低到0.013 979,結果比其他算法中最小值仍少1.35個框。EPSOBPE優(yōu)化后翼根厚度為0.079 0,與初始機翼翼根厚度較為相近,說明EPSOBPE算法得到的結果更接近全局最優(yōu)解。
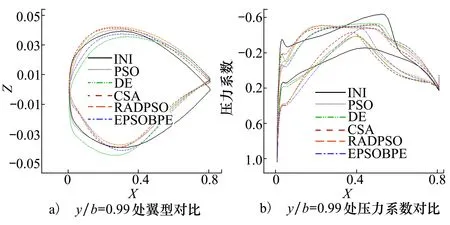
圖9 y/b=0.99處翼型與壓力系數(shù)對比圖
通過圖9可以看出EPSOBPE得到的翼根處翼型的頭部前緣半徑更小,翼型靠近后緣部分變薄并有向下彎曲的趨勢。上表面相較于初始機翼的翼型更加平坦,為了補償上表面厚度的減少,下表面厚度有所增加。通過圖9展示的壓力系數(shù)對比圖可以看出各算法的優(yōu)化結果均減弱了前緣的吸力峰,同時減弱了上表面的激波,其中EPSOBPE優(yōu)化后的上表面壓力系數(shù)過渡更為平緩,阻力更小。下表面靠近前緣處PSO算法和DE算法得到的壓力系數(shù)與初始翼型壓力系數(shù)相近,其余3種算法結果不同程度提高了壓力系數(shù)。在下表面中部所有算法都有較初始翼型更低的壓力系數(shù),其中EPSOBPE算法壓力系數(shù)更小,十分接近上表面同位置的壓力系數(shù)。
從圖10中可以看出不同優(yōu)化算法得到的翼尖翼型都有不同程度的低頭扭轉,新的截面形狀與原截面形狀區(qū)別較大。在所有算法中DE算法扭轉最大,RADPSO算法扭轉最小,優(yōu)化結果最好的EPSOBPE算法扭轉程度位于中間位置。
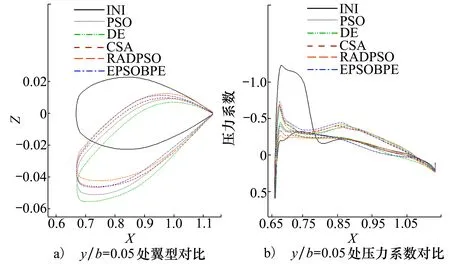
圖10 y/b=0.05處翼型與壓力系數(shù)對比圖
圖10展示了翼尖截面的壓力系數(shù)情況,可以發(fā)現(xiàn)各算法結果都不同程度地減小了翼尖的載荷,使得原機翼翼尖的激波得到了有效減弱。翼尖截面優(yōu)化后前緣部分上下截面的壓力差變小,截面中后部的壓力系數(shù)由初始的幾乎無壓力差變?yōu)橛袎毫Σ?提高了氣動效率。
圖11~16展示了優(yōu)化前后機翼上表面壓力系數(shù)云圖,可以發(fā)現(xiàn)經(jīng)過優(yōu)化后各算法都減弱了機翼中部激波,DE和EPSOBPE算法結果前緣吸力的激波較其他算法結果更弱,上表面壓力分布更為均勻,其他算法機翼上表面壓力分布均形成了2個吸力團。DE算法上表面壓力分布雖均勻,但是其機翼中部吸力峰后的壓力過渡較快,故其阻力較大。EPSOBPE的上表面壓力分布均勻,機翼中部吸力峰后的壓力過渡較DE更為平緩,故有更低的阻力。
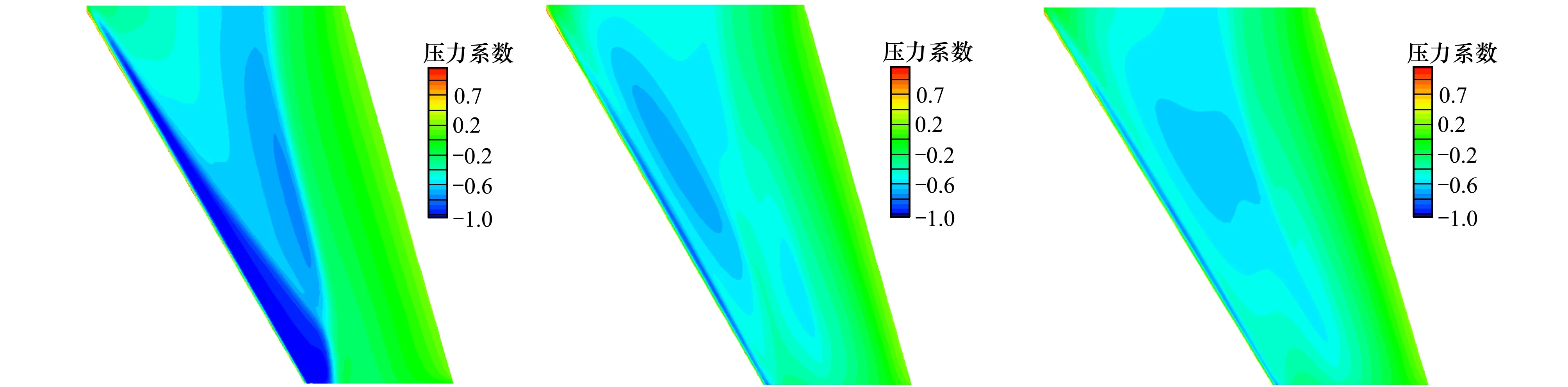
圖11 初始機翼上表面云圖 圖12 PSO優(yōu)化后機翼上表面 圖13 DE優(yōu)化后機翼上表面壓力系數(shù)云圖 壓力系數(shù)云圖
圖14 CSA優(yōu)化后機翼上表面 圖15 RADPSO優(yōu)化后機翼上表面 圖16 EPSOBPE優(yōu)化后機翼上表面壓力系數(shù)云圖 壓力系數(shù)云圖 壓力系數(shù)云圖
5 結 論
本文針對粒子群優(yōu)化算法面對多峰問題容易陷入局部最優(yōu),存在魯棒性較差的問題提出了一種基于并行交換的增強粒子群優(yōu)化算法。新算法首先使用增強學習策略對粒子群算法進行了改進來增強其局部尋優(yōu)能力,同時考慮到氣動優(yōu)化的特點,對邊界處理進行了改進,得到增強后的粒子群優(yōu)化算法;然后使增強后的粒子群優(yōu)化算法和布谷鳥搜索算法并行,每次迭代后通過分層交換操作來交換各種群信息,有機結合了增強后粒子群優(yōu)化算法的局部尋優(yōu)能力和布谷鳥搜索算法的全局尋優(yōu)能力,得到了EPSOBPE算法。新算法同時兼具了強局部尋優(yōu)能力和強全局尋優(yōu)能力,具有了極強的魯棒性。在函數(shù)測試中,EPSOBPE算法與PSO算法等共5種優(yōu)化算法在8種測試函數(shù)上進行試驗對比。結果表明EPSOBPE算法在處理低維和高維、單峰和多峰優(yōu)化測試函數(shù)都有突出表現(xiàn),驗證了新算法的優(yōu)越性和魯棒性。在二維氣動優(yōu)化算例中各算法在優(yōu)化前期表現(xiàn)較為相近,但是在優(yōu)化后期EPSOBPE算法逐漸與其他算法拉開差距,最終優(yōu)化效果更好,展現(xiàn)了對氣動優(yōu)化問題有更強適應能力。在三維氣動優(yōu)化算例中,EPSOBPE算法展現(xiàn)出了更強的尋優(yōu)能力,能夠在不斷變化的子問題中不斷找到全局最優(yōu)點,最終使機翼阻力系數(shù)優(yōu)化效果明顯好于其他算法,進一步驗證了EPSOBPE算法的強魯棒性,可在不同維度和不同種類問題中得到更優(yōu)解。
目前提升算法魯棒性、徹底解決算法搜索模式單一的方法除種群并行外仍缺乏其他方法。繼續(xù)使用種群并行機制,然后發(fā)展其他信息交換機制或提出其他解決方法將是今后重要的研究方向。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45