飛翼布局太陽能無人機低雷諾數(shù)反彎翼型設(shè)計
2022-07-22 03:23:04王科雷周洲郭佳豪徐德
西北工業(yè)大學(xué)學(xué)報 2022年3期
王科雷, 周洲, 郭佳豪, 徐德
(西北工業(yè)大學(xué) 航空學(xué)院, 陜西 西安 710072)
太陽能無人機采用太陽光輻射能作為動力,理論上具有“綠色永久飛行”的能力,在偵察監(jiān)視、通信中繼等方面具有極為廣闊的應(yīng)用前景。近年來,隨著國內(nèi)外應(yīng)用需求不斷增長,輕小型低空太陽能無人機正在由新概念探索、關(guān)鍵技術(shù)攻關(guān),迅速向?qū)嵱没⒐こ袒~進[1-2]。然而,由于飛機尺度小、飛行速度低,其低雷諾數(shù)翼型氣動設(shè)計問題日益嚴(yán)峻。
一般在低雷諾數(shù)狀態(tài)下,翼型附面層內(nèi)易于發(fā)生分離、轉(zhuǎn)捩和再附等復(fù)雜流動現(xiàn)象,進而導(dǎo)致翼型氣動特性急劇惡化[3]。因此,常規(guī)低雷諾數(shù)翼型設(shè)計主要是以增升減阻為目的,如“在翼面上保持附著層流,使不產(chǎn)生分離流”的層流翼型設(shè)計思想[4-5],或“保持翼型前緣流動附著,對翼面流動分離和轉(zhuǎn)捩進行控制和設(shè)計”的高升力翼型設(shè)計思想[6-10]等,這些在常規(guī)布局太陽能無人機設(shè)計應(yīng)用中均已取得較好的效果。然而,面對太陽能無人機對更高氣動效率和更高光伏組件鋪設(shè)率的要求,采用常規(guī)布局已經(jīng)很難再挖掘氣動和能源系統(tǒng)的潛力,開展飛翼、翼身融合等非常規(guī)布局的低雷諾數(shù)翼型設(shè)計研究已經(jīng)成為必要。然而,由于飛翼布局自身氣動力設(shè)計較為獨特,在翼型設(shè)計時即需對俯仰力矩特性進行綜合考慮,但就目前而言,國內(nèi)外對于低雷諾數(shù)翼型俯仰力矩特性的關(guān)注相對較為欠缺,僅甘文彪等[11-12]針對某全翼式布局太陽能無人機低雷諾數(shù)反彎翼型進行了設(shè)計研究和數(shù)值分析。
此外,對于輕小型低空太陽能無人機而言,追求長航時性能是其氣動布局研究的最終目標(biāo),因此該類型無人機往往需要在航時因子較高的高升力系數(shù)狀態(tài)或低需用功率狀態(tài)下飛行,甚至在靠近最大升力系數(shù)附近,以更低的速度、更小的功率飛行,從而獲得最長留空時間[12]。這就意味著,采用飛翼布局形式的輕小型低空太陽能無人機將面臨高升力、失速和緩、俯仰力矩特性等多重約束和要求,其低雷諾數(shù)翼型設(shè)計問題亦將更加復(fù)雜和困難。
圍繞上述問題,本文基于某手拋式小型太陽能無人機的應(yīng)用需求,結(jié)合優(yōu)化方法開展了飛翼布局約束下的低雷諾數(shù)反彎翼型設(shè)計研究,對在低雷諾數(shù)條件下獲取高升力長航時飛行性能的反彎翼型設(shè)計思路和設(shè)計方法進行探索和分析。
1 數(shù)值計算方法
在低雷諾數(shù)條件下,翼型附面層內(nèi)層流分離泡結(jié)構(gòu)(laminar separation bubble,LSB)的產(chǎn)生對壓力分布形態(tài)影響十分顯著,是決定低雷諾數(shù)翼型俯仰力矩特性的關(guān)鍵因素。因此,能夠準(zhǔn)確預(yù)測層流分離泡結(jié)構(gòu)的產(chǎn)生和發(fā)展對于低雷諾數(shù)翼型設(shè)計研究至關(guān)重要。目前直接數(shù)值模擬(direct numerical simulation,DNS)和大渦模擬方法(large eddy simulation,LES)在流動轉(zhuǎn)捩和層流分離泡預(yù)測方面具有明顯優(yōu)勢[13],但受計算時間、計算資源等限制,并不適用于工程設(shè)計。
因此,為提高設(shè)計效率,本文基于商業(yè)軟件FLUENT,采用耦合k-kL-ω轉(zhuǎn)捩模型[14-15]準(zhǔn)定常求解雷諾平均N-S(Reyolds-averaged Navier-Stokes,RANS)方程的計算方法來對低雷諾數(shù)翼型轉(zhuǎn)捩流動問題進行高效數(shù)值模擬和優(yōu)化設(shè)計。此外,為準(zhǔn)確反映設(shè)計翼型大迎角狀態(tài)失速特性得到改善的流動機理,采用耦合k-ω剪切應(yīng)力輸運(shear-stress transport,SST)湍流模型[16]的分離渦模擬(detached-eddy simulation,DES)非定常求解方法[17-19]對其大迎角失速分離流動問題進行高精度數(shù)值模擬和分析。數(shù)值計算過程中,采用二階迎風(fēng)MUSCL插值的Roe格式進行空間離散,采用隱式AF方法進行時間離散和推進。
為驗證本文數(shù)值模擬方法對低雷諾數(shù)轉(zhuǎn)捩流動問題和大迎角失速分離流動問題求解的準(zhǔn)確性及可靠性,選取擁有豐富氣動力試驗數(shù)據(jù)及壓強測量數(shù)據(jù)的Eppler 387翼型低雷諾數(shù)繞流算例[20-21]來進行分析研究。參考NASA蘭利研究中心低湍流度風(fēng)洞試驗條件,選取數(shù)值模擬狀態(tài)為:Ma=0.09,迎角α=-2°~16°,Δα=2°,翼型弦長雷諾數(shù)Rec=3.0×105。如圖1所示,分別采用360×150和640×330的O型網(wǎng)格進行劃分,近壁面第一層網(wǎng)格高度分別為y+≈0.5和y+≈0.1,網(wǎng)格高度由壁面向計算遠(yuǎn)場呈指數(shù)型增長,增長率分別設(shè)為1.1和1.04。在計算過程中,為提高DES模型方法計算效率,采用在RANS準(zhǔn)定常數(shù)值模擬方法計算結(jié)果收斂的基礎(chǔ)上繼續(xù)迭代的方式進行非定常計算,時間步長取為0.000 4 s,子迭代步數(shù)設(shè)為20,在10 000個時間步之后對計算結(jié)果進行采樣平均,共采樣500個時間步,最終得到時均化氣動力結(jié)果進行分析研究。

圖1 Eppler 387翼型二維網(wǎng)格示意
圖2所示為不同計算迎角下Eppler 387翼型準(zhǔn)定常/非定常氣動力計算結(jié)果與試驗數(shù)據(jù)的對比。圖3所示為Eppler 387翼型在α=0°~16°,Δα=4°的時均化計算壓力分布與試驗結(jié)果之間的對比。
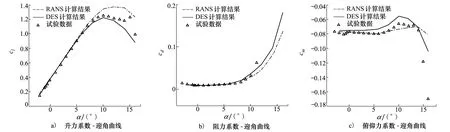
圖2 Eppler 387翼型氣動力特性曲線對比
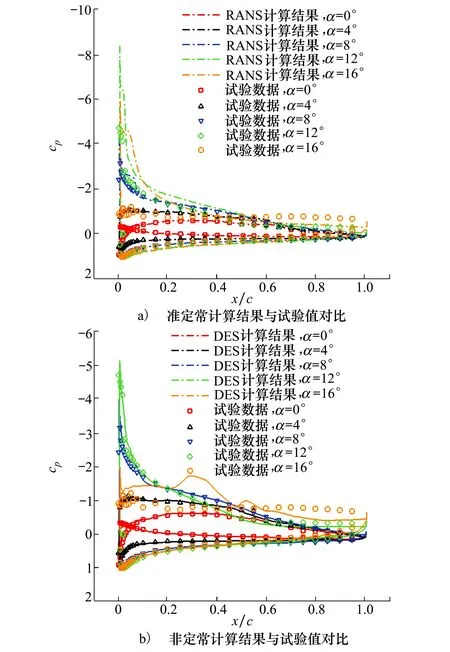
圖3 Eppler 387翼型壓力分布對比
可以看出,在α=-2°~8°的升力線性范圍內(nèi),本文準(zhǔn)定常/非定常數(shù)值模擬方法對Eppler 387翼型的氣動特性及壓強分布的預(yù)測結(jié)果均與試驗值吻合良好,而相比較于DES非定常數(shù)值模擬方法,RANS準(zhǔn)定常數(shù)值模擬方法對翼型俯仰力矩特性的預(yù)測更加準(zhǔn)確,這表明k-kL-ω轉(zhuǎn)捩模型對小迎角狀態(tài)下翼型附面層內(nèi)層流分離泡結(jié)構(gòu)的捕捉以及對流動轉(zhuǎn)捩位置的預(yù)測均較為精準(zhǔn)。
隨著計算迎角不斷增大,RANS準(zhǔn)定常數(shù)值模擬方法氣動力計算誤差逐漸增大,盡管其對翼型氣動力隨迎角變化趨勢的整體預(yù)測精度尚可,但由圖3a)壓力分布對比可以看出,該準(zhǔn)定常數(shù)值模擬方法對大迎角狀態(tài)下翼型上表面流動分離的預(yù)估不足,對翼型失速特性的反映不夠準(zhǔn)確。而DES非定常數(shù)值模擬方法計算精度則相對較高,尤其對翼型大迎角失速狀態(tài)下的氣動力預(yù)測與試驗值相對吻合更好。然而需要注意的是,由圖3b)壓力分布對比可以看出,在計算迎角α=16°狀態(tài)下,試驗得到翼型表面壓力分布沿弦向變化平緩均勻,但DES非定常時均化結(jié)果則波動較大,且總體上對翼型前半部的分離渦強度預(yù)估過強,而對翼型后半部的分離渦強度預(yù)估稍有不足,這也導(dǎo)致DES非定常數(shù)值模擬計算得到的翼型抬頭力矩相對試驗值較大。
總的來說, 本文基于k-kL-ω轉(zhuǎn)捩模型的RANS準(zhǔn)定常數(shù)值模擬方法和 DES 非定常數(shù)值模擬方法基本能夠滿足飛翼布局約束下的低雷諾數(shù)反彎翼型設(shè)計和大迎角失速特性分析的求解精度需求。
2 優(yōu)化設(shè)計問題及方法
2.1 翼型參數(shù)化方法
本文采用在翼型設(shè)計中應(yīng)用極為廣泛的CST方法[22-23]對低雷諾數(shù)反彎翼型進行參數(shù)化建模。CST參數(shù)化的翼型可以表示為
式中:x,y分別為翼型橫坐標(biāo)和縱坐標(biāo);下標(biāo)u,d分別為上(upper)下(down)的首字母縮寫;下標(biāo)t為翼型后緣(trailing edge,TE)的首字母縮寫。C(x)為類函數(shù),取N1=0.5,N2=1.0。S(x)為型函數(shù),其中Aui,Adi為上下翼面待定系數(shù),即翼型的控制變量。Si(x)為Bernstein多項式,其中N取為6,設(shè)計翼型上下表面共計14個控制變量。
2.2 優(yōu)化設(shè)計問題描述
針對飛翼布局太陽能無人機這一研究對象,考慮其手拋式起飛方式及追求高升力長航時飛行性能的應(yīng)用需求,對低雷諾數(shù)反彎翼型提出了以下設(shè)計要求:一方面,需滿足巡航迎角(αcruise)下的高升阻比、高航時因子要求,另一方面,需滿足大迎角(αlarge)下的高升力、高航時因子需求。同時,在不同計算迎角下,優(yōu)化翼型俯仰力矩系數(shù)(cm-optimal)需始終不小于基準(zhǔn)翼型俯仰力矩系數(shù)(cm-baseline)。此外,結(jié)合實際工程中結(jié)構(gòu)強度需求及載荷空間需求,將翼型最大相對厚度(t/cmax)及后緣厚度(tTE)均約束為保持不變。
至此,本文低雷諾數(shù)反彎翼型優(yōu)化設(shè)計問題可以表達為
(7)
式中:cl與cd為低雷諾數(shù)反彎翼型計算升力系數(shù)和阻力系數(shù);ω1,ω2為巡航迎角下升阻比和航時因子的權(quán)重系數(shù);ω3,ω4為大迎角下升力和航時因子的權(quán)重系數(shù);ω5,ω6為巡航迎角特性和大迎角特性的權(quán)重系數(shù)。
2.3 基于代理模型的優(yōu)化設(shè)計框架
如圖4所示,采用多島遺傳算法(multi-island genetic algorithm,MIGA)[24]為搜索器進行單目標(biāo)尋優(yōu),其中子群規(guī)模設(shè)定為12,島嶼數(shù)為12,遺傳代數(shù)設(shè)定為20,交叉率設(shè)定為0.7,變異率設(shè)定為0.3,島間遷移率設(shè)定為0.5,遷移間隔代數(shù)設(shè)定為4。為了進一步提高設(shè)計效率,在優(yōu)化過程中,采用均勻試驗設(shè)計方法[25]與最小化代理模型預(yù)測(minimize surrogate prediction,MSP)法則[26]相配合來構(gòu)建和更新Kriging代理模型[27-28]的方式,實現(xiàn)對實際數(shù)值計算過程的逼近和代替。

圖4 低雷諾數(shù)反彎翼型優(yōu)化設(shè)計流程
具體設(shè)計步驟可以概括為:①根據(jù)試驗設(shè)計方法進行初始種群抽樣,將初始樣本點數(shù)目設(shè)定為120,采用RANS準(zhǔn)定常數(shù)值模擬方法并行計算出各樣本點響應(yīng)值;②基于樣本點數(shù)據(jù)建立代理模型,并進行子優(yōu)化求解;③根據(jù)加點法則獲取有效的新樣本點,并將新的樣本點加入構(gòu)建代理模型的樣本點,完成代理模型更新;④判斷優(yōu)化是否結(jié)束,未結(jié)束則跳轉(zhuǎn)至步驟②,結(jié)束則輸出優(yōu)化結(jié)果,進入優(yōu)化翼型分析驗證。
3 設(shè)計結(jié)果及分析
結(jié)合某手拋式小型飛翼布局太陽能無人機實際工作狀態(tài),將本文低雷諾數(shù)反彎翼型設(shè)計狀態(tài)確定為:飛行高度H=6 000 m,來流速度V∞=15 m/s,弦長c=0.4 m,弦長雷諾數(shù)Rec=2.5×105,巡航迎角αcruise=8°,計算大迎角αlarge=14°。選取NACA 8-H-12反彎翼型作為基準(zhǔn),在兼顧巡航狀態(tài)翼型升阻特性的基礎(chǔ)上重點關(guān)注大迎角失速狀態(tài)分離流動特性,取ω1=0.4,ω2=0.6,ω3=0.4,ω4=0.6,ω5=0.3,ω6=0.7的權(quán)重系數(shù)組合作為算例進行優(yōu)化設(shè)計研究。
圖5為優(yōu)化前后翼型輪廓曲線對比,可以看出,優(yōu)化后翼型前緣半徑相對有所增大,翼型頭部彎度亦有所增大,而翼型中部正彎度及后緣反彎趨勢則相對有所減弱,最大厚度位置亦稍有前移。

圖5 優(yōu)化設(shè)計前后翼型輪廓曲線對比
分別采用準(zhǔn)定常/非定常數(shù)值模擬方法對設(shè)計狀態(tài)下基準(zhǔn)翼型和優(yōu)化翼型的低雷諾數(shù)繞流問題進行計算和分析,其中翼型計算網(wǎng)格劃分方式及數(shù)值計算設(shè)置等均與前文低雷諾數(shù)翼型算例保持一致,計算迎角范圍取為α=-4°~20°,但準(zhǔn)定常計算迎角間隔取為Δα=2°,非定常計算迎角間隔則取為Δα=4°。首先,針對采用2種數(shù)值模擬方法計算得到的優(yōu)化前后翼型氣動力特性進行對比分析,其次,以RANS準(zhǔn)定常數(shù)值模擬方法結(jié)果為主,對優(yōu)化前后翼型時均化繞流流場特性變化趨勢進行分析,最后,以DES非定常數(shù)值模擬方法結(jié)果為主,對大迎角失速狀態(tài)下優(yōu)化前后翼型非定常流動發(fā)展進行研究。
3.1 氣動力特性分析
圖6為優(yōu)化前后翼型氣動力特性曲線對比。由圖可以看出,準(zhǔn)定常/非定常2種數(shù)值模擬方法在α=-4°~8°迎角范圍內(nèi)計算得到的優(yōu)化前后翼型氣動特性變化趨勢一致,而在α=8°~20°迎角范圍內(nèi)計算結(jié)果差異較大,但整體上均表明優(yōu)化翼型在巡航狀態(tài)及大迎角失速狀態(tài)下的升阻特性和俯仰力矩特性均相比基準(zhǔn)翼型得到明顯改善。
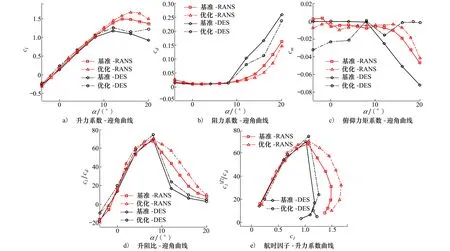
圖6 優(yōu)化設(shè)計前后翼型氣動力特性曲線對比
準(zhǔn)定常數(shù)值計算結(jié)果表明:優(yōu)化翼型在滿足俯仰力矩約束的前提下,全計算迎角范圍內(nèi)升力系數(shù)與基準(zhǔn)翼型相比較均有所提高,升力線斜率則基本不變,最大升力系數(shù)相對提高近12.6%,且最大升力系數(shù)對應(yīng)迎角則由14°增大到16°,可以有效改善小型飛翼布局太陽能無人機的手拋式起飛性能,此外,優(yōu)化翼型阻力曲線相對基準(zhǔn)翼型整體右移,在正迎角狀態(tài)下阻力特性得到明顯改善,同時在較高升力系數(shù)下,阻力系數(shù)隨升力系數(shù)的增長相對較為緩慢,這使得優(yōu)化翼型在設(shè)計迎角狀態(tài)下的升阻比及航時因子均有所提高,其中,在巡航迎角α=8°狀態(tài)下優(yōu)化翼型計算升阻比相對提高約3.26%,航時因子相對提高約3.23%,而在計算大迎角α=14°狀態(tài)下優(yōu)化翼型計算升阻比相對提高約44.06%,航時因子相對提高約42.70%。
非定常數(shù)值計算結(jié)果表明:在全計算迎角范圍內(nèi),優(yōu)化翼型相比基準(zhǔn)翼型的升阻特性始終更優(yōu),在巡航迎角α=8°狀態(tài)下,優(yōu)化翼型計算升阻比相對提高約6.79%,航時因子相對提高約4.19%。盡管優(yōu)化前后翼型均在α=12°迎角狀態(tài)下開始失速,但優(yōu)化翼型失速特性相對和緩,升力隨迎角維持較好,且阻力隨迎角增加相對緩慢,如在α=12°,α=16°,α=20°迎角失速狀態(tài)下,優(yōu)化翼型計算升阻比相對分別提高約39.77%,55.57%,55.62%,航時因子相對分別提高約44.45%,58.70%,78.21%,這有利于手拋式小型飛翼布局太陽能無人機的高升力長航時飛行。
3.2 時均化繞流流場特性分析
圖7給出采用準(zhǔn)定常數(shù)值模擬方法計算得到的α=8°,12°,16°迎角下優(yōu)化前后翼型壓力分布對比。

圖7 優(yōu)化設(shè)計前后翼型壓力分布對比
由圖可知,在計算迎角α=8°狀態(tài)下,基準(zhǔn)翼型前緣呈陡峭型壓力分布,且在計算迎角增大為α=12°時,基準(zhǔn)翼型上表面代表層流分離泡結(jié)構(gòu)的低壓平臺區(qū)域迅速前移,且低壓平臺長度顯著減小,基準(zhǔn)翼型附面層內(nèi)流動特征分布發(fā)生顯著改變,之后隨著計算迎角進一步增大,基準(zhǔn)翼型頭部壓力分布特征基本保持不變;相應(yīng)地,在計算迎角α=8°狀態(tài)下,優(yōu)化翼型前緣為圓頂型壓力分布,氣流加速區(qū)內(nèi)壓力變化和緩,且前緣吸力峰值相對基準(zhǔn)翼型較低,同時其上表面低壓平臺相對靠前,低壓平臺長度相對較小,這在一定程度上抵消了由后緣反彎減弱帶來的低頭力矩增加,之后隨著迎角不斷增大,優(yōu)化翼型上表面低壓平臺逐漸前移,但前移幅度始終相對較小,壓力分布特征變化相對更加緩和,未出現(xiàn)如基準(zhǔn)翼型一般的突躍式改變,同時優(yōu)化翼型前緣壓力分布形態(tài)逐漸由圓頂型轉(zhuǎn)變?yōu)槎盖托汀?/p>
圖8~9分別給出采用準(zhǔn)定常數(shù)值模擬方法計算得到的優(yōu)化前后翼型在α=6°~16°迎角范圍內(nèi)的時均化繞流流場特性分布對比,主要包括湍流強度分布和流線分布, 同時也給出翼型上表面層流分離泡結(jié)構(gòu)和二次湍流分離等流場細(xì)節(jié)的局部放大圖,其中標(biāo)記“S”、“T”、“R”、“ST”分別表示層流分離、流動轉(zhuǎn)捩、湍流再附著、湍流分離。表1~2分別給出各計算迎角下優(yōu)化前后翼型上表面附面層內(nèi)流動特性參數(shù),包括圖8~9所示層流分離、流動轉(zhuǎn)捩、湍流再附著、湍流分離的弦向相對位置,以及所形成的層流分離泡長度,其中翼型附面層內(nèi)流動分離及再附著位置主要依靠Vx矢量方向進行判斷,流動轉(zhuǎn)捩位置則通過湍流強度It≥0.1判斷。可以看出,隨著計算迎角變化,翼型附面層內(nèi)流動呈現(xiàn)2種典型結(jié)構(gòu):一種是低雷諾數(shù)典型層流分離泡結(jié)構(gòu);另一種是在翼型前緣形成層流分離泡的同時在翼型后部發(fā)生湍流分離。

圖8 基準(zhǔn)翼型繞流流場結(jié)構(gòu)示意

圖9 優(yōu)化翼型時均化繞流流場結(jié)構(gòu)示意
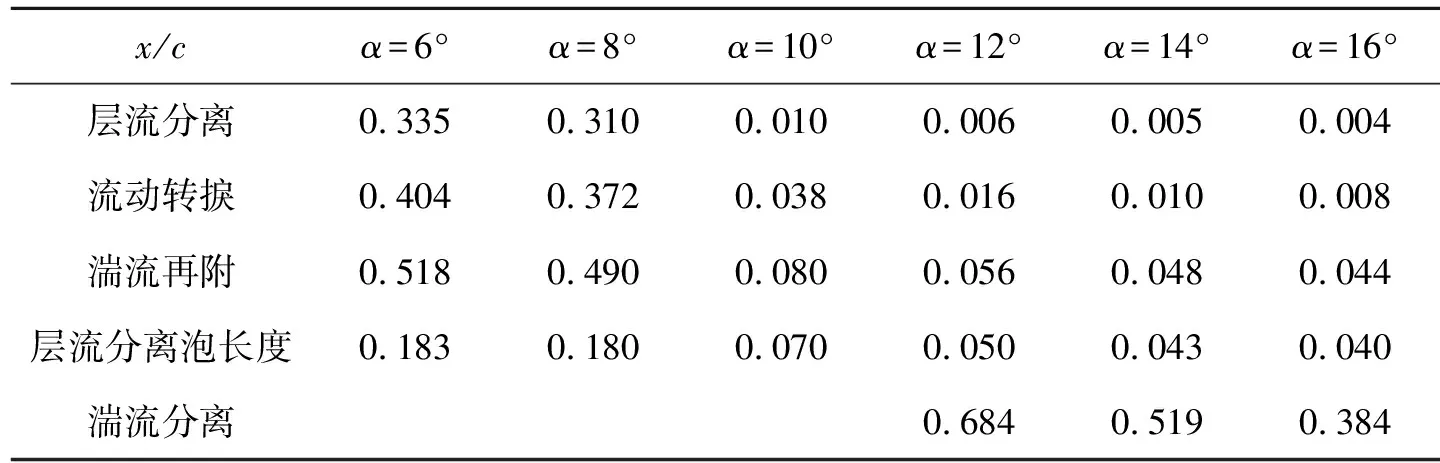
表1 基準(zhǔn)翼型附面層內(nèi)流動特征位置分布
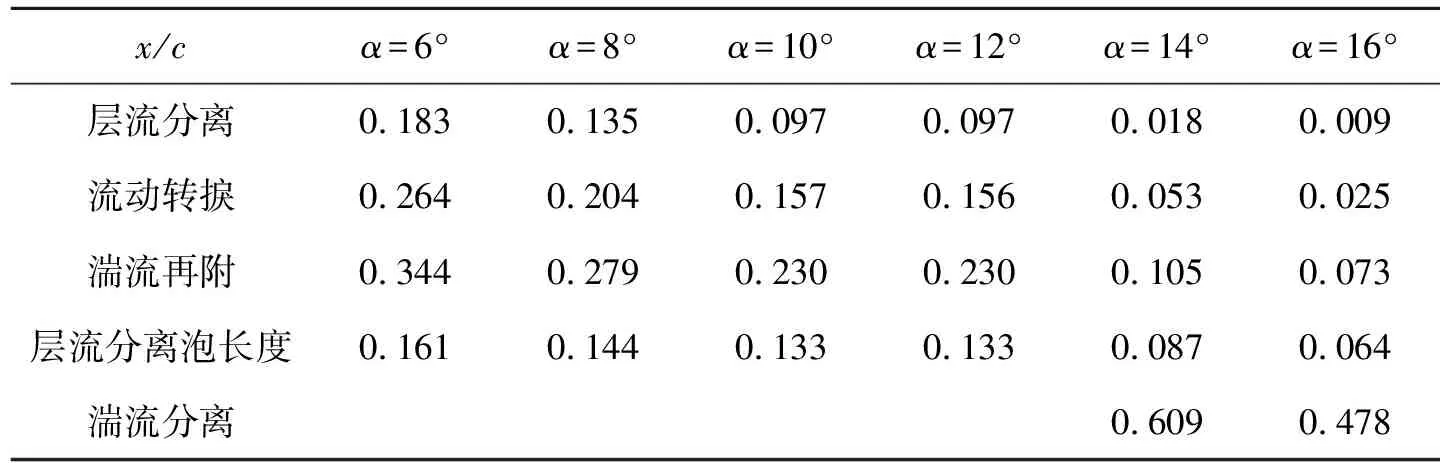
表2 優(yōu)化翼型附面層內(nèi)流動特征位置分布
不同的是,對于基準(zhǔn)翼型而言,在計算迎角α由8°增大為10°時,翼型附面層內(nèi)層流分離泡結(jié)構(gòu)顯著前移,且層流分離泡長度明顯減小,翼型繞流流場結(jié)構(gòu)特征已然發(fā)生改變;當(dāng)計算迎角α由10°增大為12°時,翼型前部層流分離泡位置及長度改變較小,但翼型中后部在后緣反彎輪廓特征的作用下,出現(xiàn)后緣湍流分離現(xiàn)象,翼型繞流流場結(jié)構(gòu)特征又一次發(fā)生改變;之后隨著計算迎角進一步增大,翼型前部附近層流分離泡位置及長度基本保持不變,翼型中部湍流分離點則逐漸前移,后緣湍流分離區(qū)域亦不斷增加。
而對于優(yōu)化翼型而言,其后緣反彎輪廓特征相對較弱,因此在計算迎角α由8°增大為12°的過程中,翼型附面層內(nèi)流動特征位置基本沒有顯著改變,流場結(jié)構(gòu)特征始終較為一致;之后隨著計算迎角進一步增大,翼型中后部出現(xiàn)湍流分離現(xiàn)象,翼型繞流流場結(jié)構(gòu)特征發(fā)生本質(zhì)改變,但相比于基準(zhǔn)翼型,優(yōu)化翼型附面層內(nèi)湍流分離位置始終靠后,后緣分離強度亦相對較弱,因此優(yōu)化翼型在大迎角狀態(tài)下升阻特性相對更優(yōu)。
總的來說,在小迎角狀態(tài)下,基準(zhǔn)翼型前緣壓力分布呈陡峭型,而優(yōu)化翼型前緣壓力分布則呈圓頂型,這使得優(yōu)化翼型前部載荷分布變化相對更加緩和,有利于推遲流動分離點的前移,進而拓展升力線性段范圍。此外,在大迎角狀態(tài)下,優(yōu)化翼型后緣反彎減弱則有利于抑制翼型后部湍流分離的發(fā)生,以及降低翼型后部分離流動的強度,是優(yōu)化翼型失速迎角和最大升力系數(shù)均相對基準(zhǔn)翼型有所增大的主要原因。
3.3 大迎角失速狀態(tài)非定常流動特征分析
圖10~12分別給出優(yōu)化設(shè)計前后翼型在失速發(fā)生前后α=12°,α=16°,α=20°迎角狀態(tài)下不同時刻(t1=44.20 s,t2=44.28 s,t3=44.36 s,t4=44.44 s,t5=44.52 s,t6=44.60 s)的瞬時壓力分布和時均(time averaged)壓力分布對比。可以看出,在計算迎角α=12°狀態(tài)下,優(yōu)化翼型上表面時均化的低壓區(qū)域范圍(0≤x/c≤0.5)相比基準(zhǔn)翼型(0≤x/c≤0.25)明顯更大,同時優(yōu)化翼型后緣附近的壓力恢復(fù)特征相對基準(zhǔn)翼型更優(yōu),壓差阻力特性相對更佳。此外,基準(zhǔn)翼型上表面瞬時壓力分布隨時間變化規(guī)律性相對較差,除翼型前緣吸力峰之外可觀測存在3~4處較為明顯的低壓峰,而優(yōu)化翼型上表面瞬時壓力分布規(guī)律性相對較強,除翼型前緣吸力峰之外可觀測存在2處明顯低壓峰,同時在翼型后半段0.6≤x/c≤1.0范圍內(nèi),優(yōu)化翼型上表面分布的低壓峰值相對基準(zhǔn)翼型明顯較低,這表明優(yōu)化翼型瞬態(tài)流場內(nèi)的分離渦流動強度相對基準(zhǔn)翼型較弱。
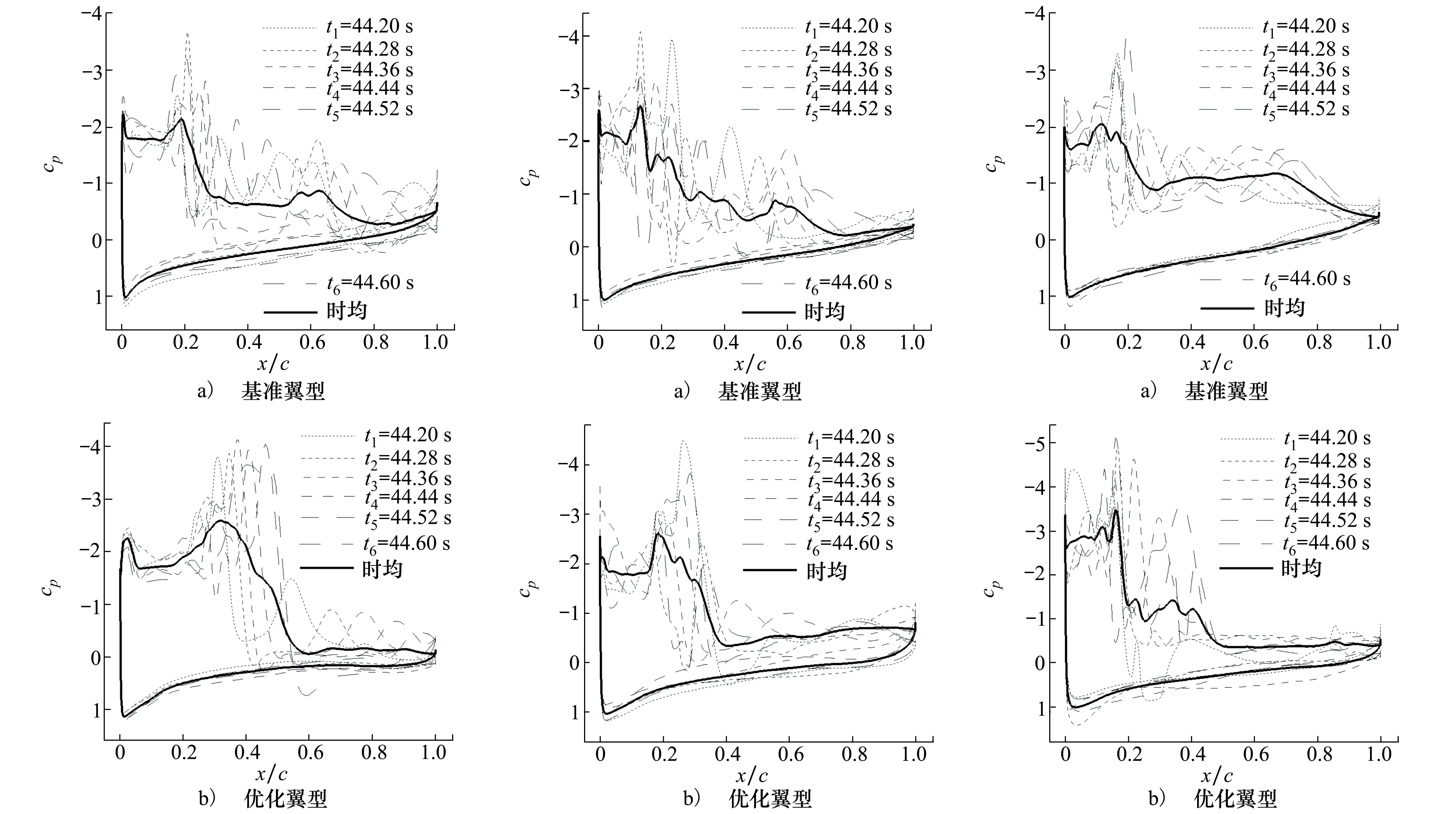
圖10 優(yōu)化設(shè)計前后翼型壓力 圖11 優(yōu)化設(shè)計前后翼型壓力 圖12 優(yōu)化設(shè)計前后翼型壓力分布對比(α=12°) 分布對比(α=16°) 分布對比(α=20°)
當(dāng)計算迎角增大為α=16°時,基準(zhǔn)翼型和優(yōu)化翼型的瞬時壓力分布特征與時均化壓力分布特征在宏觀上均與α=12°狀態(tài)較為一致。隨著迎角增大,2種翼型前緣吸力峰值均有所增大,而上表面時均化低壓區(qū)域范圍均相對減小,但優(yōu)化翼型上表面時均化低壓區(qū)域范圍(0≤x/c≤0.35)相比基準(zhǔn)翼型(0≤x/c≤0.2)始終較大,這與準(zhǔn)定常數(shù)值模擬方法計算得到的優(yōu)化前后翼型壓力分布特征變化趨勢較為一致(見圖7)。
當(dāng)計算迎角進一步增大為α=20°時,基準(zhǔn)翼型和優(yōu)化翼型的壓力分布特征相比α=12°,α=16°狀態(tài)發(fā)生明顯改變。對于基準(zhǔn)翼型而言,隨著迎角增大,其前緣吸力峰值相對降低,同時其上表面時均化壓力分布出現(xiàn)范圍較廣(0.3≤x/c≤0.7)、幅值穩(wěn)定的低壓平臺,也即有大范圍翼面始終處于分離渦流動的影響之中。而對于優(yōu)化翼型而言,隨著迎角增大,其前緣吸力峰值不斷增大,且相比較基準(zhǔn)翼型顯著較大,這也是優(yōu)化翼型在當(dāng)前迎角下的計算升力相比基準(zhǔn)翼型更大(見圖6a))的主要原因。同時優(yōu)化翼型上表面瞬時壓力分布的波峰、波谷基本上僅出現(xiàn)在0≤x/c≤0.5范圍內(nèi),這與基準(zhǔn)翼型的分離流動特征存在顯著差異,表明優(yōu)化翼型的分離渦流動強度相對基準(zhǔn)翼型明顯較弱。
為進一步分析計算迎角α=20°狀態(tài)下翼型繞流流場內(nèi)分離渦結(jié)構(gòu)的發(fā)展,如圖13所示,采用Q準(zhǔn)則[29]對α=20°迎角下各時刻流場內(nèi)的渦核進行判斷。可以看出,基準(zhǔn)翼型在大迎角失速狀態(tài)下的分離流動是以前緣失速渦的產(chǎn)生、向下游發(fā)展和向翼型斜上方脫落為主導(dǎo),其上翼面中段會伴隨產(chǎn)生有一個由剪切層分離形成的分離泡,這與圖12a)中0.3≤x/c≤0.7弦長范圍內(nèi)時均化低壓平臺相對應(yīng)。相比較下,優(yōu)化翼型在大迎角失速狀態(tài)下,其后緣會形成逆時針旋轉(zhuǎn)的尾渦(起動渦),同時其前緣也會形成前緣失速渦,而最顯著的特點是,前緣失速渦在向下游發(fā)展過程中不脫落,始終滯留在翼型近壁面附近,而順時針旋轉(zhuǎn)的失速渦在發(fā)展至翼型后緣處時會與逆時針旋轉(zhuǎn)的尾渦配對,二者相互作用使兩渦心都存在向下的速度,該速度與主流速度疊加后,尾渦向翼型下游泄出,而失速渦則在翼面和新生尾渦的作用下逐漸消弭,顯然,這種特殊而復(fù)雜的分離渦形態(tài)有效抑制了優(yōu)化翼型近壁面區(qū)域內(nèi)大尺度分離渦的形成和發(fā)展。
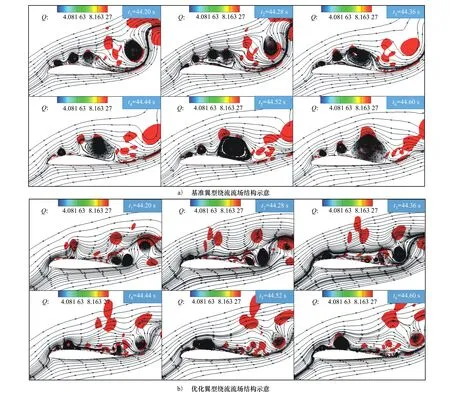
圖13 優(yōu)化設(shè)計前后翼型繞流流場內(nèi)分離渦結(jié)構(gòu)隨時間發(fā)展(α=20°)
4 結(jié) 論
1) 本文所發(fā)展的基于k-kL-ω轉(zhuǎn)捩模型的RANS準(zhǔn)定常數(shù)值模擬方法和耦合k-ωSST湍流模型的DES非定常數(shù)值模擬方法對于低雷諾數(shù)轉(zhuǎn)捩流動問題和翼型大迎角失速分離流動問題具有較高的求解精度,其中RANS準(zhǔn)定常數(shù)值模擬方法對于翼型附面層內(nèi)流動分離及轉(zhuǎn)捩位置預(yù)測較為精準(zhǔn),而DES非定常數(shù)值模擬方法則可以較好地捕捉大迎角狀態(tài)下翼型繞流流場內(nèi)分離渦的產(chǎn)生和發(fā)展,可以滿足低雷諾數(shù)反彎翼型設(shè)計和失速特性研究需求。
2) 本文基于手拋式飛翼布局太陽能無人機的應(yīng)用需求所發(fā)展的低雷諾數(shù)反彎翼型優(yōu)化設(shè)計方法切實可行。優(yōu)化翼型最大升力系數(shù)以及大迎角失速狀態(tài)下的升阻比、航時因子均相對顯著提高,同時優(yōu)化翼型繞流流場內(nèi)相對基準(zhǔn)翼型較多較弱的分離渦結(jié)構(gòu)有效抑制了距離翼型較近區(qū)域內(nèi)的大尺度分離渦的形成和發(fā)展,避免了失速狀態(tài)升力損失,達到了失速和緩的設(shè)計目標(biāo),有利于小型飛翼布局太陽能無人機的手拋式起飛和高升力長航時飛行。
3) RANS準(zhǔn)定常數(shù)值模擬結(jié)果表明:在巡航狀態(tài)下,翼型前緣圓頂型壓力分布形態(tài)使得其前部載荷分布變化更加緩和,有利于推遲流動分離點的前移,進而拓展升力線性段范圍;而在大迎角狀態(tài)下,翼型后緣反彎減弱有利于抑制翼型后部湍流分離的發(fā)生,以及降低翼型后部分離流動的強度,可以有效改善翼型大迎角失速特性,提高失速迎角和最大升力系數(shù)。
4) DES非定常數(shù)值模擬結(jié)果表明:在計算迎角α=12°~16°范圍內(nèi),優(yōu)化翼型上表面時均化的低壓區(qū)域范圍相比基準(zhǔn)翼型更大,同時優(yōu)化翼型后緣區(qū)域壓力恢復(fù)形態(tài)相對更優(yōu);而在計算迎角α增大為20°時,基準(zhǔn)翼型前緣吸力峰值顯著降低,且上表面存在大范圍低壓平臺,而優(yōu)化翼型前緣吸力峰值有所增大,且翼型上表面瞬時壓力分布的波峰、波谷出現(xiàn)的區(qū)域保持穩(wěn)定。這是因為基準(zhǔn)翼型在大迎角失速狀態(tài)下的分離流動是以前緣失速渦的產(chǎn)生、向下游發(fā)展和向翼型斜上方脫落為主導(dǎo),而優(yōu)化翼型在大迎角失速狀態(tài)下的繞流流場結(jié)構(gòu)則較為特殊,通過失速渦和后緣尾渦的相互作用,有效避免了近壁面區(qū)域內(nèi)大尺度分離渦的形成和發(fā)展。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16