STM32的四軸飛行器的設計
2022-07-23 06:36:22湛江科技學院楊超瓊韋發清
電子世界 2022年1期
關鍵詞:測量
湛江科技學院 楊超瓊 韋發清
四軸飛行器屬于無人飛行載具中較為常見的一種,是采用十字形布局的電機與螺旋漿直連的結構,通過各電機轉速的調整與配合,飛行器在飛行過程中可以獲取旋轉機身、改變飛行姿態的力,從而實現穩定飛行。隨著微機電技術高速發展,四軸飛行器使用愈加廣泛,例如在交通、航拍、無人機表演、農業及快遞等領域均有投入使用。
1 四軸飛行器總體設計
四軸飛行器由遙控器和飛控兩大部分構成,遙控器可發送各種控制指令至飛控,飛控接收到指令后會快速響應指令進而改變其飛行狀態。其具體組成如圖1所示,遙控器主要由STM32F103控制器、搖桿ADC、OLED顯示屏、NRF24L01無線收發模塊組成,飛控部分由STM32F411主控模塊、MPU9250姿態數據處理模塊、電機驅動模塊、BMP280定高數據處理模塊及NRF51822無線通信模塊組成。

圖1 系統結構框圖
2 四軸飛行器硬件電路設計
2.1 主控模塊
本設計主控芯片為STM32F411CEU6,具有128K字節靜態隨機存儲器、512K字節FLASH閃存、3路USART、3路I2C、11個16位和32位100MHz的定時器等,能夠完全滿足設計需求。主控模塊主要是將從MPU9250和BMP280傳感器中獲取的數據通過算法進行處理后,通過PWM信號控制電機,以達到飛行器穩定飛行的目標。其電路如圖2所示。
2.2 傳感器模塊
本設計選擇MPU9250傳感器電路,MPU9250實際上是內部集成了一個MPU6500六軸傳感器和一個AK8963三軸磁力計,他們共用一個IIC接口,這樣組合成一個九軸傳感器。飛控是通過IIC接口來控制MPU9250的測量配置和讀取MPU9250傳感器寄存器中的六軸測量數據。其電路圖如圖3所示。

圖3 傳感器電路
2.3 無線通信模塊
本設計中四軸飛行器使用的無線通信電路主要由飛控端使用的NRF51822和遙控器端使用的是NRF24L01兩部分組成。飛控端NRF51822通過USART接口與STM32F411CEU6連接,遙控端NRF24L01采用SPI接口與STM32F103C8連接,遙控端通過NRF24L01發送各類指令,飛控端通過NRF51822接收各類遙控端發送的指令并做出及時響應,進而實現飛控與遙控器兩大模塊之間的無線通信。其電路圖分別如圖4、圖5所示。

圖4 NRF51822無線通信電路

圖5 NRF24L01無線通信電路
2.4 搖桿裝置模塊
搖桿裝置模塊是遙控器中重要組成部分,采用的是帶按鍵及360°自動回中類型。遙控器配有兩個搖桿,分別為油門搖桿和方向搖桿,一個搖桿有2個電位器,電位器中心抽頭連接至MCU的ADC引腳。其中油門搖桿2個電位器的電壓AD值轉換為對應THRUST(油門)和YAW(航向角)的控制值;方向搖2個電位器的電壓AD值轉換為對應PITCH(俯仰角)和ROLL(橫滾角)的控制值。所有電位器采集的AD值范圍都在0-4095,然后將AD值轉換為對應控制值。其電路圖如圖6所示。

圖6 搖桿電路
3 四軸飛行器軟件設計
3.1 MPU9250
MPU9250內部集成有3軸陀螺儀(測角速度)、3軸加速度計和3軸磁力計,輸出均為16位的數字量,可以通過集成電路總線(IIC)接口和單片機進行數據交互,傳輸速率可達400kHz/s。3軸陀螺儀動態特性反應迅速,能夠測量的角速度范圍最大為±2000(°/s);3軸加速度計則更為適合靜態測量重力加速度g,其測量范圍可達±16g;3軸磁力計主要可測量磁感應強度范圍為±4800μT之間,其在測量偏航角的過程中起輔助作用。
飛行器機身姿態角度信息θ(俯仰角)、φ(橫滾角)、ψ(航向角)需要由姿態傳感器MPU92503軸分別測量到角速度、加速度、磁感應強度信經解算后獲取。地平面與三角坐標系中X軸形成的角度稱之為俯仰角θ,地平面與三角坐標系中Y軸構成的角度稱之為橫滾角φ,其繞三角坐標系中Z軸旋轉的角度稱之為航向角ψ。本設計將主控芯片STM32F411CEU6和MPU9250姿態傳感器結合,實現了姿態角度檢測的功能;為進一步準確檢測機身本體的姿態角度,對陀螺儀、加速度計、磁力計測算的角度信息采用互補濾波算法進行處理后獲取更加精密的數據。
3.2 PID算法控制
由比例(Proportion)、積分(Integral)和微分(Derivative)三單元構成的PID反饋回路被廣泛應用在工業控制領域。基于反饋理論中測算、比較和執行三要素,對于PID控制器,就需要將實際的測量值和期望值進行比較,幫助系統糾正在運行過程中出現的偏差。
在得到測量值和設定的參數值之后,可以使用PID反饋回路調整系統使之達到或保持在期望值,PID控制框圖如圖7所示。PID系統不具備良好的動態響應特性,適合應用在不隨時間變化的線性系統。由四軸飛行器的機身升力與其螺旋槳轉速呈平方倍關系,且電機轉速與輸出電壓并不是呈線性關系可以看出飛行器是非線性系統,故四軸使用單極PID反饋回路很難取得預期效果。
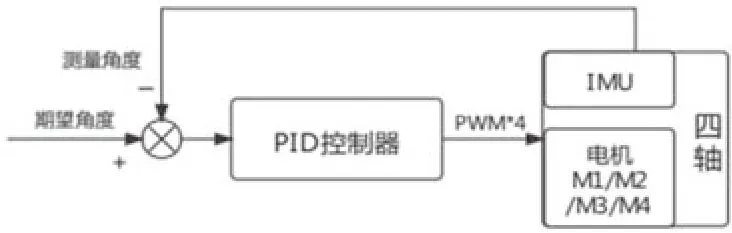
圖7 單極PID
為解決以上問題,提出了串級PID的方法。串級PID是由內環PID控制和外環PI控制嵌套組成。其中內環比例單元P的作用是糾正四軸飛行器的角速度,積分單元I能夠將飛行器角速度控制靜差消除,積分單元D對四軸系統運動起抑制作用;外環比例單元P可以糾正四軸飛行器角度,積分單元I可實現消除飛行器角度控制靜差的功能。
串級PID與單極PID不同,由圖7可知單極PID輸入和反饋的數據分別是期望角度和測量角度,但是如圖8所示串級PID外環與單極PID一致均為角度信息,其內環的輸入信息為期望角速度、反饋信息為測量角速度。通過內外環結合在一起控制飛行的角速度與角度,飛行器即使在外環角度數據出現較大變化時,依然能夠平穩飛行。

圖8 串級PID
結語:基于以上設計,選用的STM32F4系列的主控芯片STM32F411CEU6,9軸狀態傳感器MPU9250釆集飛行器姿態數據信息,氣壓定高傳感器BMP280測量四軸飛行器的飛行高度,NRF81255芯片進行無線通信,在飛行過程中,通過PID控制算法消除誤差,能夠實現對四軸飛行器各姿態的精準控制。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00