智能分類垃圾桶
2022-07-23 06:36:24上海工程技術大學陳芃均侯麗萍
電子世界 2022年1期
上海工程技術大學 李 斐 陳芃均 侯麗萍
1 研究背景
早在2004年中國就已經超越美國成為世界第一垃圾制造大國,而且中國目前全國生活垃圾年產量為4億噸左右,并以大約每年8%的速度遞增。面對垃圾污染,人們也采取了衛生填埋、焚燒、堆肥等無害化處理,但其中部分方法仍會造成環境污染(例如:焚燒、填埋)。近年來,垃圾提倡分類投放,分類處理,垃圾分類有一下幾點優點:第一、去掉可回收的、不易降解的物質,減少垃圾數量60%以上,減少占土。第二、分出有害垃圾,減少污染。第三、可回收垃圾可變廢為寶。第四、減少廢塑料被動物誤食的風險。
處理垃圾污染迫在眉睫,如今我國多數城市已經開始實施垃圾分類政策,而由于相關知識的普及難免不夠全面,垃圾桶內總有垃圾錯誤投放的事情發生,所以為提高垃圾投放的正確率,本項目將設計一款智能分類垃圾桶。
智能分類垃圾桶的種類有很多,目前比較常見的智能分類垃圾桶有以下幾種:
(1)智能垃圾分類亭(見圖1)
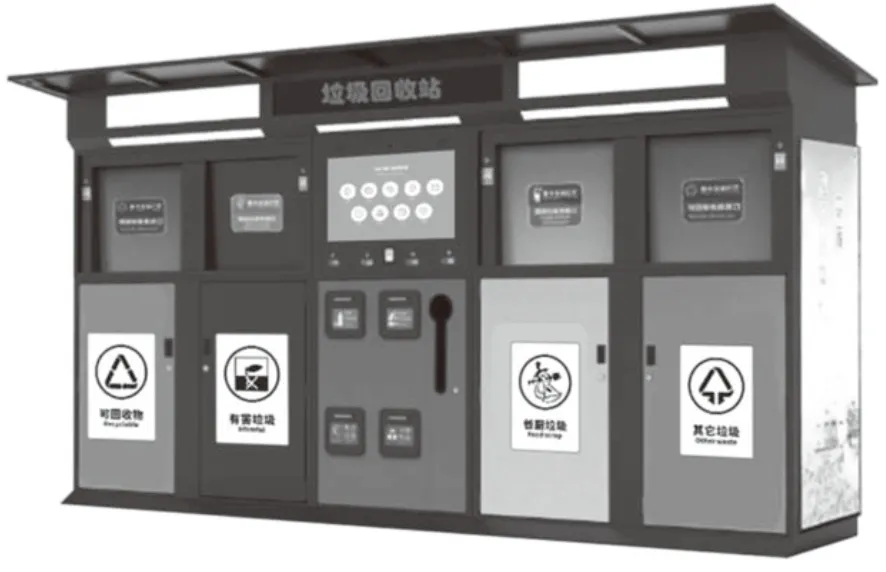
圖1 智能垃圾分類亭
這種分類亭一般放在社區,有專門的人員進行監督管理。它通過投放人員輸入所帶垃圾的名稱打開相應的垃圾桶來進行垃圾分類。
(2)基于云端的分類垃圾桶(見圖2)

圖2 基于云端的分類垃圾桶
目前這種垃圾桶形式比較多,但考慮到其基于云端,所以后面的普及工作將不會很順利。
為響應垃圾分類政策,智能分類垃圾桶的開發在近年來熱度比較高,但目前所見的智能分類垃圾桶大致為上面兩種,但這兩種在實際應用中仍然存在一些問題。例如,智能化程度不夠高,這主要針對第一類垃圾桶,它的智能分類能力主要體現在,可以根據投放者所說的垃圾打開相應的垃圾桶。但如無人監督,投放者可以將各種不同垃圾投放到同一個垃圾桶中,這并不能達到分類的目的,況且,這種垃圾桶由于體積的問題,將其安放在街邊是不現實的;第二類垃圾桶符合當今萬物互聯的理念,并且借助互聯網可以較第一類垃圾桶更為智能地實現垃圾分類。而這類垃圾桶由于互聯網而方便,同時也受到互聯網的牽制,從而導致其在普及方面存在困難。
2 設計方案
2.1 總體設計方案(見圖3)

圖3 總體設計方案
2.2 硬件方案
(1)主體結構
該垃圾桶內有四個分類艙:可回收垃圾、廚余垃圾、有害垃圾、干垃圾。其中由于有害垃圾在日常生活中的產量比較少所以將該智能垃圾桶的電源部分、控制芯片部分放在有害垃圾艙下部的分艙里(如圖4所示)。在垃圾通的上部是用來分類的分類盤。當下位機接收到上位機的分類結果后,分類盤將在下位機的作用下完成分類,設計好的垃圾桶模型如圖5所示。

圖4 有害垃圾艙的布局

圖5 垃圾桶模型
(2)分類盤結構
基于模型的分類盤設計是直徑為200mm的圓形結構,將該圓形的1/4扇形設置為可動底部(下文中稱該可動底部為擋板),擋板可以在舵機的帶動下開合,從而實現將分類盤中的垃圾丟入垃圾桶中的目的(分類盤的3D模型見圖6)。

圖6 分類盤的3D模型
(3)垃圾分類的機械設計
該垃圾桶(模型)分類的主要機械部分由17HS4401步進電機、舵機和連桿構成。步進電機的作用是將分類盤的1/4空缺部分定位到將要投擲當前盤中垃圾的垃圾艙上方。當電機完成定位后,由舵機拉動連桿,再由連桿控制擋板開合使得垃圾掉入對應垃圾艙內,該部分的3D模型見圖7。

圖7 分類機械設計
2.3 軟件方案
(1)識別模塊
本產品的識別部分是由YOLO v4視覺識別網絡實現的,識別功能屬于該產品的上位機功能,所以被部署于Raspberry pi上。YOLO v4屬于深度學習的一種,所以其識別需要基于相應的訓練集才能完成。我們的訓練集是生活中各種常見的生活垃圾,這些垃圾的圖片可以通過python進行網上爬取。得到爬取到的照片后利用LabelImg軟件對圖片打標簽,從而生成算法可以識別的.xml文件。將生成好的.xml文件導入算法進行訓練,當loss值十分低時即可利用對應的模型進行識別。訓練好的模型對主程序提供一個接口,方便后期的維護和部署。
(2)滿檢模塊
為了顯示垃圾桶的滿載情況,該產品利用VL53L1X激光測距模塊實現了垃圾桶的滿檢模塊。該模塊采用IIC通訊,將此模塊部署于垃圾桶的擋板下部。當垃圾完成投放后,由Arduino控制的激光測距模塊對相應的垃圾艙經行測距,利用得到的測距結果與空垃圾艙進行比值計算即可得到當前垃圾艙的滿載量。Arduino將計算出的滿載量上傳到Raspberry pi中,最終將由顯示屏將每個艙的當前滿載量顯示給客戶。
(3)機械控制模塊
主要的機械控制模塊由下位機Arduino控制電機和舵機完成。所控制的電機為步進電機,該步進電機的步進角為1.8°,即一個脈沖對應電機轉過1.8°的角。為了增加電機轉動過程中的穩定性,外部采用電機驅動模塊將步進角進行細分,當細分值為8時,電機的轉動穩定性已經滿足要求。利用Arduino的P13腳來進行產生脈沖,所有產生的脈沖數量由上位機產生的垃圾分類結果決定,具體的決定方式:例如,有害垃圾需要轉的角度為90°(轉角方向由電機驅動模塊DIR腳的高低電平決定,該腳的高低電平由P12腳提供),這可以通過程序中的公式Num=angle*8/1.8來獲得所需要產生的脈沖數。當電機轉到相應位置后,利用Arduino自身的Servo庫產生90°對應的PWM,此時即可以控制擋板的開合實現垃圾的投擲。
結束語:本文設計了一種占用空間小(方便普及,但可以通過需求來調整垃圾桶體積)、無人操作的智能分類垃圾桶設備。該設備通過單片機、樹莓派和深度學習來完成垃圾分類工作。由于基于深度學習的圖像識別技術是事先訓練好的,所以在后面垃圾桶識別過程中不需要用到網絡,這種設計主要是針對上面提到的第二類垃圾桶由于依賴網絡而普及困難的問題提出的。另外由于它的分類不需要人員監督,可以在一定程度上節省實現垃圾分類的人力。這種垃圾桶的實現將具有推動垃圾分類政策普及和提高分類正確率的實際價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06