RMU中BOOL子系統特殊聯鎖功能研究
2022-07-25 13:35:02蔣爽
鐵路通信信號工程技術 2022年7期
蔣 爽
(卡斯柯信號有限公司,北京 100070)
1 概述
基于動態間隔的運能可配置列車運行控制系統,以下簡稱新型列控系統,利用北斗和GPS 雙模衛星及多傳感器信息融合實現列車組合精確定位,車載設備自身具備列車占用檢查和完整性檢查功能,列車可不依賴信號機、軌道電路等軌旁設備即可實現控車。該系統已經在哈爾蓋? 木里鐵路(簡稱哈木線)的一段進行跑車實驗,并通過專家驗收評審。
新型列控系統主要由車載設備(OBS)、對象控制器設備(OC)和運營控制中心設備組成。其中運營控制中心設備由資源管理系統(RMU)、動態運能決策系統(DCD)、列控維護支持系統(IOM)和地基增強系統(TAAN)組成。RMU 為新型列控系統中的地面信號安全設備,負責資源管理功能。由于軌旁設備的弱化,車站可以不設置信號機和軌道電路,但是BOOL 子系統的設計仍沿用了既有聯鎖的設計方式,站場按著虛擬信號機和軌道電路來設計。由于新型列控的系統需求,對于原來站內聯鎖功能,如進路辦理、進路解鎖等提出新的要求,為此設計了具有特殊聯鎖功能的BOOL 子系統,以配合RMU 完成列車的資源管理功能。
2 BOOL子系統的接口信息
BOOL 子系統通過系統應用軟件(ASW)間接與DCD 和OBS 實現信息傳遞,完成進路資源的建立和釋放功能,與OC 接口,實現道岔的控制和表示信息的采集。BOOL 子系統接收OBS 或者DCD的進路辦理命令,判斷進路的相關條件滿足后,即為資源申請成功,向列車提供相應授權。列車通過進路后,OBS 向BOOL 發送進路釋放申請,BOOL子系統通過檢查列車占用及出清狀態,解鎖列車進路,資源得到釋放。
BOOL 子系統接收ASW 子系統相關信息如下。
1)區段占用、空閑狀態;
2)區段LOI 封鎖狀態,LOI 封鎖狀態可能由于列車失去完整性、列車定位不準確和車地通信中斷導致,BOOL 子系統收到LOI 封鎖狀態等同于區段占用狀態來處理;
3)列車請求進路,用于通知選排、鎖閉進路或重開信號;
4)進路接近鎖閉條件(JLJJSB),用于通知列車是否接近;
5)接近列車為通信車,用于通知可按自動閉塞來開放信號;
6)進路使用完畢(JLSYWB),用于通知可以解鎖進路;
7)分段解鎖信息(JSJ),用于分段解鎖。
BOOL 向ASW 子系統發送的相關信息如下。
1)進路狀態,用于列車授權;
2)區間運行方向。
3 相關功能的設計與實現
3.1 進路辦理
BOOL 子系統的進路排列,可以接收來自車載OBS 的進路觸發,也可以接收DCD 的人工辦理命令。目前的聯鎖車站,進路的辦理采用雙按鈕或者多按鈕(變更進路)的方式,需要按壓進路的始、終端,才能選出進路。BOOL 子系統,接收的進路排列命令均為單一的進路控制消息,進路的辦理及鎖閉方式,需要按新的需求進行重新設計。
進路辦理前,需要檢查本條進路上的道岔、區段、信號機等資源是否已經被征用,如果道岔已經處于進路鎖閉或者被鎖閉到相反的位置,區段處于占用或者LOI 封鎖,信號機處于延時解鎖狀態或者與本進路的沖突進路或敵對照查進路已經辦理且鎖閉,即認為本進路的資源已經被征用,進路不能辦理。只有當進路上的資源未被占用,才允許排列本進路。由于BOOL 子系統能同時接收OBS和DCD 的進路辦理命令,為防止同時收到兩個系統的相互沖突的進路辦理命令(這里說的沖突進路包含了敵對進路和抵觸進路),BOOL 子系統在進路辦理時,檢查了與本進路沖突的進路命令是否已經下發,如果沖突命令已經存在,本進路將不能辦理。如果同時收到兩條沖突進路的辦理命令,BOOL 子系統將不會執行任一進路辦理命令。進路辦理的流程如圖1 所示。

圖1 進路建立流程Fig.1 Flowchart of route setting
本實驗項目中BOOL 子系統在接收到進路辦理請求后,檢查未收到沖突進路辦理命令且進路上的資源未被占用,則執行進路辦理,如果在45 s 時間內進路仍未辦理成功,則清除本次進路辦理命令。由于在進路辦理前,已經檢查相關沖突進路命令沒有下發,能確保本進路命令下發后,進路能夠持續辦理。同時因為本進路的辦理命令存在,也使得沖突進路的辦理條件不能成立,確保沖突進路不會同時辦理。在收到進路辦理命令后,驅動道岔轉換到規定位置,從而實現進路鎖閉。如果進路辦理命令已經下發,此時收到進路上道岔位置的相反單操命令,會繼續保持原有的進路辦理命令,繼續排列進路。
3.2 進路解鎖
3.2.1 取消及延時解鎖
取消及人工解鎖進路條件跟既有聯鎖類似,采用列車未接近時可以取消進路,接近后需要采用人工延時解鎖的方式解鎖進路。但由于系統需求差異,BOOL 子系統取消進路的解鎖還需做相應的特殊處理。BOOL 子系統,不僅可以接收DCD 的人工取消或人解命令來解鎖進路,還可以接收OBS 的進路取消命令。在車列尚未駛入接近區段,OBS 可通過發送進路解鎖(JLSYWB)信息給BOOL 子系統,來關閉信號和解鎖進路,以便于計劃改變及時更改進路。如果列車已駛入接近區段,OBS 向BOOL 子系統發送列車接近鎖閉信息JLJJSB,告知列車已經接近。如果仍需要解鎖進路, OBS 向BOOL 子系統發送JLSYWB,經過延時后,解鎖進路。
在列車未駛入進路且進路完整時,都可以通過DCD 和OBS 的取消命令進行解鎖進路。由于新型列控系統采用無線定位方式,在通信不穩定的情況下,可能出現沒有接收到接近區段占用的信息,而直接收到進路內第二個區段占用的信息,造成列車非正常壓入的情況。在進路上區段空閑后,所有區段都沒解鎖。此時如果要解鎖進路,需要人為確認列車已經全部出清進路,只能通過DCD 下發總人解命令,經過延時后,解鎖進路,此種情況不能通過OBS 的進路解鎖命令來解鎖進路。
另外,對于由DCD 系統下發進路辦理命令,人工辦理的進路,一般都是給非通信車辦理的進路。因為無法得知列車具體位置,無論列車是否接近,都認為接近鎖閉條件已經構成,需要采用延時的方式來解鎖進路。進路取消解鎖的流程如圖2 所示。

圖2 取消進路解鎖流程Fig.2 Flowchart of the cancellation of route release
3.2.2 正常解鎖
進路的正常解鎖提供兩種解鎖方式:一種是可以隨著列車的順序占用、出清而分段解鎖;一種是列車正常壓入進路,等到列車完全出清進路后,采用一次性解鎖。如果列車沒有按著正常的分段解鎖,待列車完全出清進路后,還可以采用一次性解鎖方式來解鎖進路。正常解鎖流程如圖3 所示。
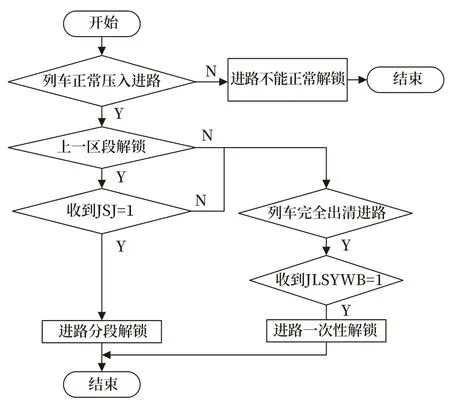
圖3 正常解鎖流程Fig.3 Flowchart of normal route release
分段解鎖的解鎖條件是由ASW 子系統通過列車報告的位置信息變化,判斷出當前列車是否在對應進路的軌道區段上。如果區段由占用變為空閑,認為列車出清本區段,具備解鎖的條件,將區段的分段解鎖信息(JSJ=1)發送給BOOL 子系統,BOOL 子系統進行相關的邏輯判斷,在列車正常進入進路,信號關閉,且本區段的上一區段已經正常解鎖的情況下,判定本區段具備解鎖的條件,可以解鎖。本區段解鎖檢查了上一區段已經解鎖,實現進路上區段隨著車列順序出清后依次解鎖。
一次性解鎖,當列車進入進路,并出清進路上的所有區段后,收到OBS 的進路解鎖信息(JLSYWB=1),進路一次性解鎖。考慮到無線定位系統可能出現定位不準等情況,進路的解鎖不檢查列車是否順序占用出清,只要解鎖時進路內所有區段為空閑,即可解鎖。
3.2.3 事故解鎖
在因故無法正常解鎖時,提供事故解鎖的方式,來單獨解鎖區段。為避免出現迎面解鎖區段的情況,事故解鎖也要求在其上一區段已經解鎖且本區段無車的情況下,才能進行本區段的事故解鎖。
3.3 站間改方
由于系統結構的需求,改方電路的功能由BOOL 子系統實現。本系統的改方電路和既有的四線制改方電路不同,相比原來的改方電路,本系統設計的電路更加簡便、易實施,且辦理方式更加靈活。改方的辦理方式整體上分為兩種,正常辦理和故障辦理。
3.3.1 改方的辦理方式
1)正常改方:在區間空閑時,可以通過下面兩種方式實現。
原接車站,可以通過辦理發車進路,來實現兩站的改方。辦理發車進路前,檢查區間空閑,鄰站不是接車狀態,且鄰站沒有辦理到區間的發車進路,在辦理發車進路后,先將鄰站改為接車方向后,本站改為發車方向。
原發車站,可以通過辦理接車進路,來實現兩站的改方。在檢查兩站區間空閑后,且本站不是接車方向,鄰站沒有辦理接車進路后,本站辦理接車進路,在本站改為接車方向后,鄰站改為發車方向。
2)故障改方:用于區間故障時的改方。區間故障時,相鄰兩個車站按下對應方向口的故障改方按鈕后,再通過上述正常辦理改方的手續,來完成改方,改方結束,恢復故障改方按鈕。
3.3.2 改方功能的實現
對于每個方向口設置兩個代表接、發車方向的參數變量,JCFJ=1 表示接車方向,FCFJ=1 表示發車方向。一個發車口的JCFJ 和FCFJ 不能同時成立。把相鄰的兩個進站口作為一對相關聯的方向口來處理,當本站的方向口為接車方向(JCFJ=1)時,同時會將鄰站的發車方向FCFJ 也置為1,從而實現兩站的同時改方,保持兩站的方向統一。BOOL子系統剛上電時,所有的方向口都處于無方向的狀態,即處于安全狀態。根據運營計劃需要,確認整個線路的運行方向,通過辦理進路的方式來實現兩站之間的自動改方。
改方時,初始時甲站為接車站,預改為發車站,相關的方向參數變化如表1 所示。初始時甲站為發車站,預改為接車站,相關的方向參數變化如表2所示。

表1 接車站發起改方的參數狀態Tab.1 Parameters and status for the receiving station to initiate the change in direction

表2 發車站發起改方的參數狀態Tab.2 Parameters and status for the departure station to initiate the change in direction
4 總結
本文針對資源管理系統(RMU)中的BOOL子系統相比于傳統聯鎖功能的差異和新增部分,做了詳細分析和介紹。BOOL 子系統根據系統總體的需求和接口內容,在既有聯鎖基礎上設計了符合本系統要求的進路排列、解鎖和改方等相關功能。BOOL 子系統的相關功能已經在實驗項目中得到驗證,滿足資源管理系統(RMU)的對應需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
中外會展(2014年4期)2014-11-27 07:46:46
