基于節點增強的功能點陣設計方法
2022-07-25 12:02:10徐贛君
中國機械工程 2022年13期
徐贛君 戴 寧
南京航空航天大學機電學院,南京,210016
0 引言
增材制造能針對設計對象的特點為其提供專屬設計方案,它不但能在宏觀層面上實現結構的拓撲設計,還可以利用空間梯度上的變化提高結構的力學性能。目前,面向增材制造的設計方法主要有蒙皮點陣結構設計[1]、薄壁加筋結構設計[2]、一體化結構設計[3]、異形拓撲優化結構設計[4]。點陣是結構功能一體化的優良載體,對點陣結構的胞元進行參數化設計可實現輕質化、承載和減振等各項功能的有機融合[5],并已成功應用于生物醫學[6]、汽車[7]和航空航天[8]等領域。早期的點陣結構研究主要通過數值模擬方法來預測其形狀或性能的改變。王飛等[9]借助數值分析方法提出了點陣結構的細觀力學模型,并將其用于預測不同相對密度的點陣結構在單向壓縮過程中的變形、失穩和破壞。施月奇等[10]根據經典梁模型理論分析了點陣結構在復雜載荷作用的變形規律,研究表明,改變點陣結構的桿結構半徑和傾角可以明顯影響點陣結構的力學性能。
將功能點陣的理論研究應用到實際工程中的難點集中在探究材料最優分布和充分發揮力學性能。前者參照有限元分析結果,將均質點陣設計為梯度點陣,從而實現點陣結構力學性能的調控;后者通過改變點陣結構胞元的構型和幾何尺寸,發揮點陣結構輕質高強度的優點。探究材料最優分布方面,趙芳壘等[11]對三點彎曲模型進行拓撲優化分析,并依據三點彎模型的相對密度對點陣結構進行重建,實驗表明該方法能有效提高點陣的承載性能。DAYNESA等[12]參照主應力分析結果來改變均質點陣結構的胞元大小和構型,并將點陣結構沿應力等值線重新布局,從而生成承載性能更好的梯度點陣。DU PLESSIS等[13]依據均質點陣的有限元分析結果來增大高應力區域點陣的桿徑,提高整體結構的承載性能。上述設計方法均參照有限元仿真結果對點陣進行優化設計,體現了有限元仿真分析對點陣建模的重要參考價值。
充分發揮力學性能方面,AREMU等[14]利用共形點陣設計方法提高了整體連通性,并驗證共形點陣在復雜載荷下的力學性能比均質點陣的好。任利民等[15]通過邊界強化模型構造的一種梯度點陣提高了蒙皮與點陣間的邊界強度,保證了載荷的有效傳遞。KANG等[16]按照均質點陣結構拓撲優化后的相對密度設計了一種梯度點陣結構,實驗表明該方法設計的梯度點陣結構的剛度和強度都比均質點陣明顯提高。喻長江等[17]提出一種多級點陣結構的建模方法,并通過實驗證明多級點陣具有更大的彈性模量和更優的斷裂韌性。上述設計方法通過改變點陣胞元的構型,有效提高了點陣整體的承載能力。
本文提出了一種減振承載一體化的點陣設計方法,該方法對共形梁線構造體素化空間距離場并抽取等值面來生成共形點陣,依據梁模型的仿真分析結果對節點進行參數化調控。然后,以齒輪為載體對其輻板填充功能點陣。通過搭建的振動檢測平臺檢測點陣型齒輪結構的振幅,并結合有限元仿真和承載實驗檢測點陣型齒輪結構的承載能力。
1 功能點陣結構設計
1.1 技術路線
功能點陣設計流程如圖1所示。首先,對點陣梁線構造體素化空間距離場并抽取等值面,實現點陣結構建模。然后,根據給定功能設計要求對點陣結構的梁模型進行仿真,并參照仿真分析結果對節點進行參數化調控。
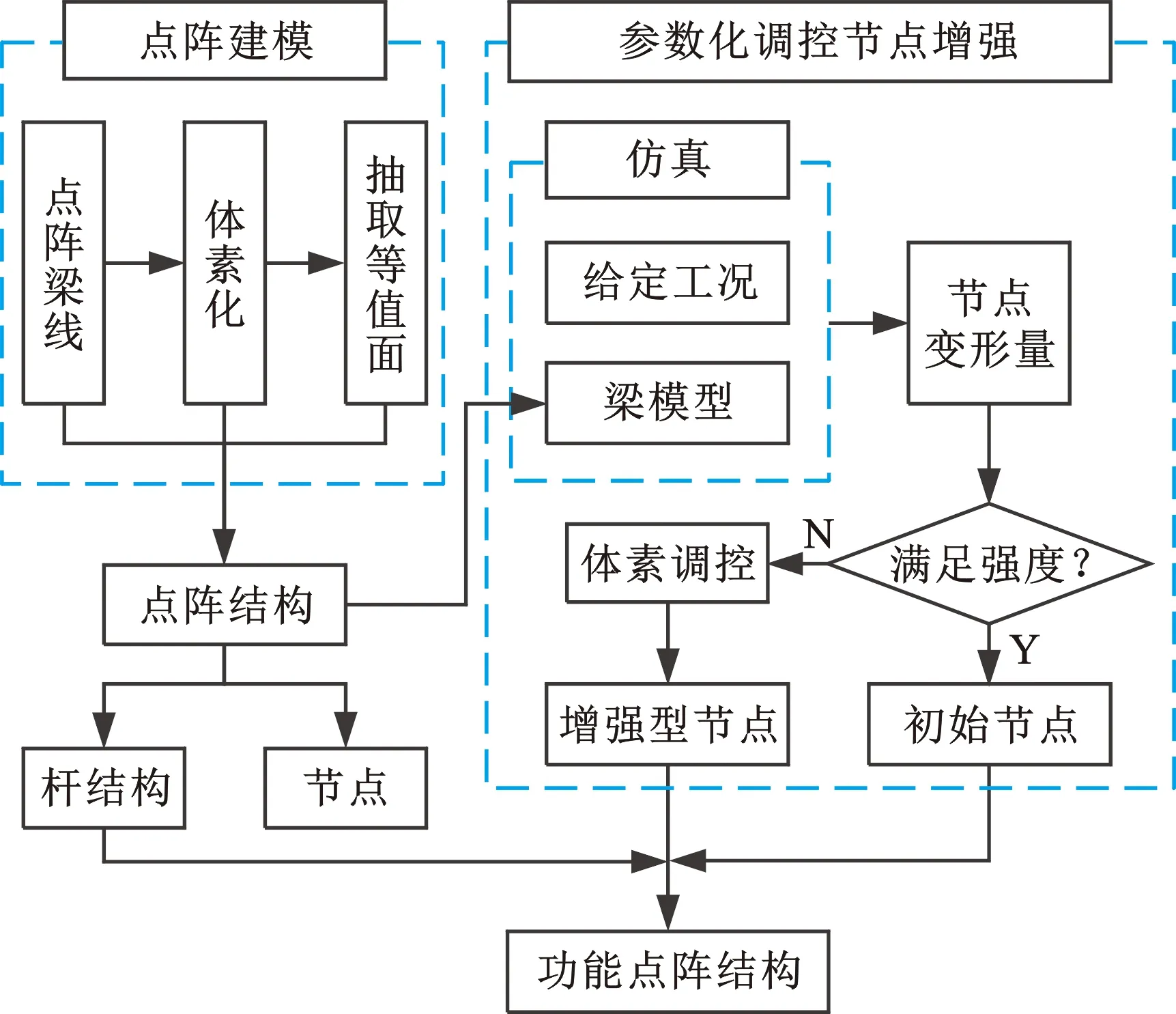
圖1 功能點陣設計流程Fig.1 Functional lattice design workflow
1.2 點陣梁線
如圖2a所示,在環形包圍盒中創建點陣結構需要對點陣結構的梁線進行裁剪和連接,然而該方法會破壞其完整性,進而削弱邊緣強度。因此本文采用適應環形面的共形梁線進行后續點陣設計,如圖2b所示。
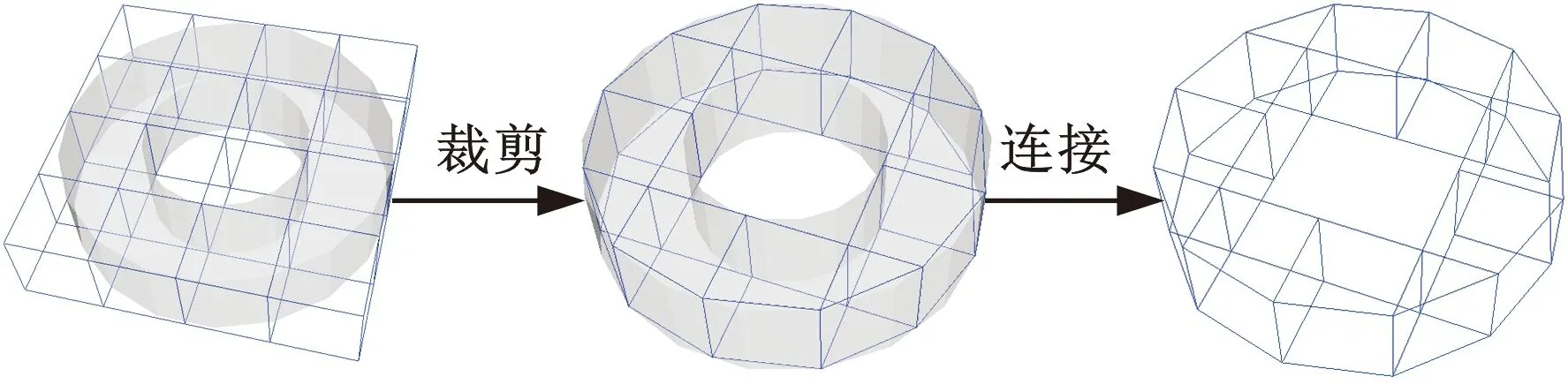
(a)非共形梁線
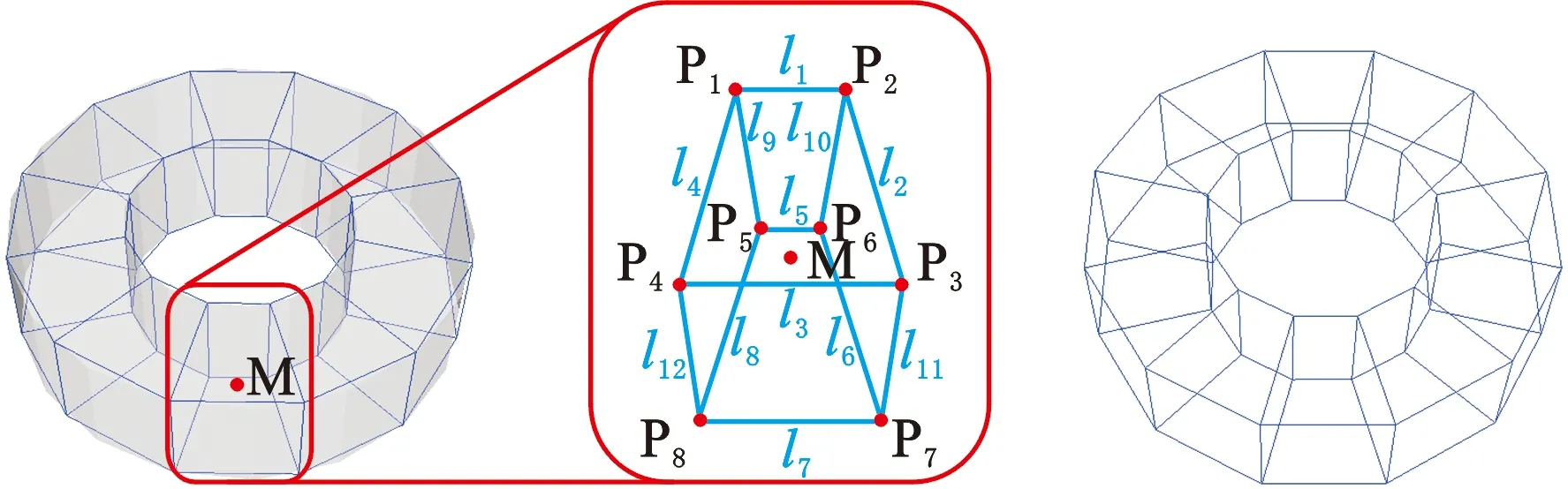
(b)共形梁線圖2 環形包圍盒內的點陣結構梁線Fig.2 Lattice structure beams for ring box
1.3 體素化空間距離場函數模型
構造點陣實體結構的方式有兩種:方法1,對點陣結構梁線賦半徑相同的圓形截面來生成點陣結構,見圖3a;方法2,先對點陣結構梁線構造體素化空間距離場,再對點陣結構梁線抽取等值面來生成點陣結構,見圖3b。相比于方法1,方法2生成的點陣結構的節點更加飽滿,桿與桿之間的過渡更加平滑,因此減少了節點的應力集中,提高了點陣結構的力學性能[20]。本文選擇方法2構造點陣結構,該方法主要分為3個步驟:①構造距離場函數模型;②對梁線體素化并計算每個體素的距離場函數值;③利用Marching Cubes算法對體素化空間抽取等值面,生成點陣結構。如圖3c所示,點陣的曲面模型由許多體素組成,體素(圖3d)是最小組成單元,其中心到每根梁的距離為距離函數值。由于距離函數值相同的體素在同一個曲面上,因此對體素化空間抽取等值面便可獲得點陣結構。
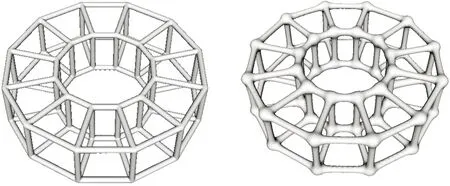
(a)方法1生成的點陣結構 (b)方法2生成的點陣結構
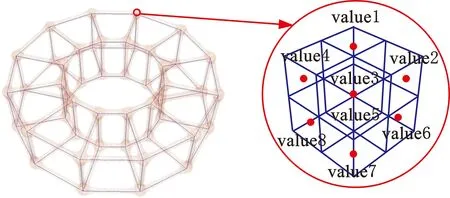
(c)點陣結構的曲面模型 (d)體素圖3 構造點陣結構的方法Fig.3 The method of constructing lattice structure
為獲得體素的距離場函數值,將體素記為點N,其坐標記為(x,y,z),將梁線記為L。點N到L的距離為該體素的距離函數值。L的2個端點記為起點S和終點E。如圖4所示,點N與L有3種空間位置關系,不同的空間位置關系有不同的點到線的距離計算公式。因此,這里通過下式來判斷點N與點L的空間位置:
t=[(xS-xN)(xS-xE)+(yS-yN)(yS-yE)+
(zS-zN)(zS-zE)][(xS-xE)2+(yS-yE)2+
(zS-zE)2]-1
(1)
式中,t為判斷參數,(xS,yS,zS)、(xE,yE,zE)、(xN,yN,zN)分別為點S、E和N的坐標。
t<0時,點N到線L的距離為點N到點S的線段長度(見圖4a);0≤t≤1時,點N到線L的距離為點N到線L的垂線段長度(見圖4b);t>1時,點N到線L的距離就是點N到點E的線段長度(見圖4c)。因此,計算點N到線L的距離公式為
d(N,L)=
(2)
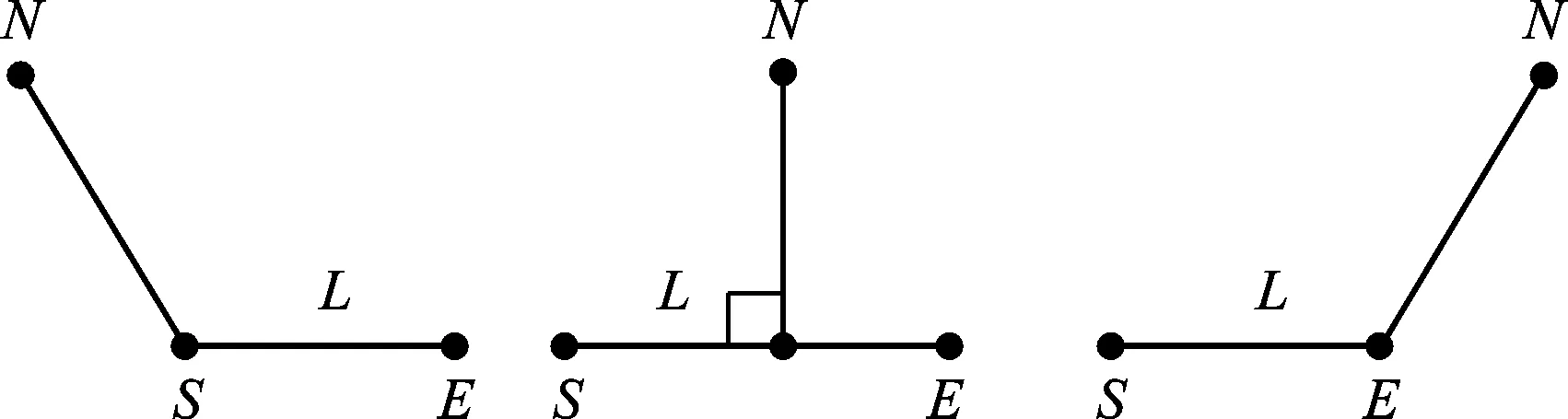
(a)t<0 (b)0≤t≤1 (c)t>1圖4 體素與梁線的空間位置Fig.4 Spatial position of voxels and beams
于是,體素化空間距離場函數模型為
(3)
式中,Nx、Ny、Nz分別為包圍盒沿X軸、Y軸、Z軸劃分所得到體素的數量。
如表1所示,改變距離場函數值可以改變點陣胞元的節點半徑和桿徑。
1.4 節點參數化調控
桿結構的連接處存在應力集中,因此節點往往被視為點陣最薄弱處。由點陣結構的細觀力學模型[11]可知,增大節點半徑可提高點陣強度。本節提出的參數化調控方法根據給定工況對點陣的梁模型進行有限元分析,并依據其分析結果增大強度不足的節點半徑,從而實現點陣整體強度的提高。節點半徑由參與調控的節點體素的距離場函數值及參與調控的節點體素的數量決定。點陣
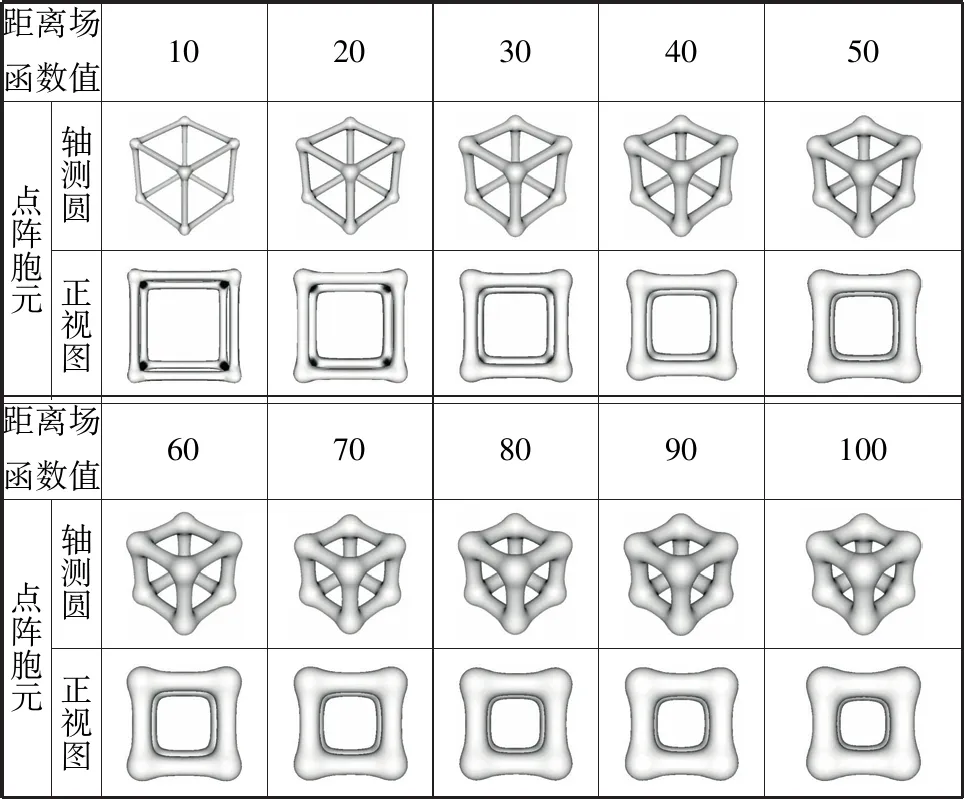
表1 距離場函數值對點陣胞元的影響
模型的體素化信息可表示為(I,x,y,z,V),其中,I為體素號,(x,y,z)為體素坐標,V為距離場函數值。梁模型仿真結果中,節點分析的結果表示為(I,x,y,z,F),其中,F為梁節點的變形量。實現梁模型仿真結果對點陣體素的調控的具體算法如下。
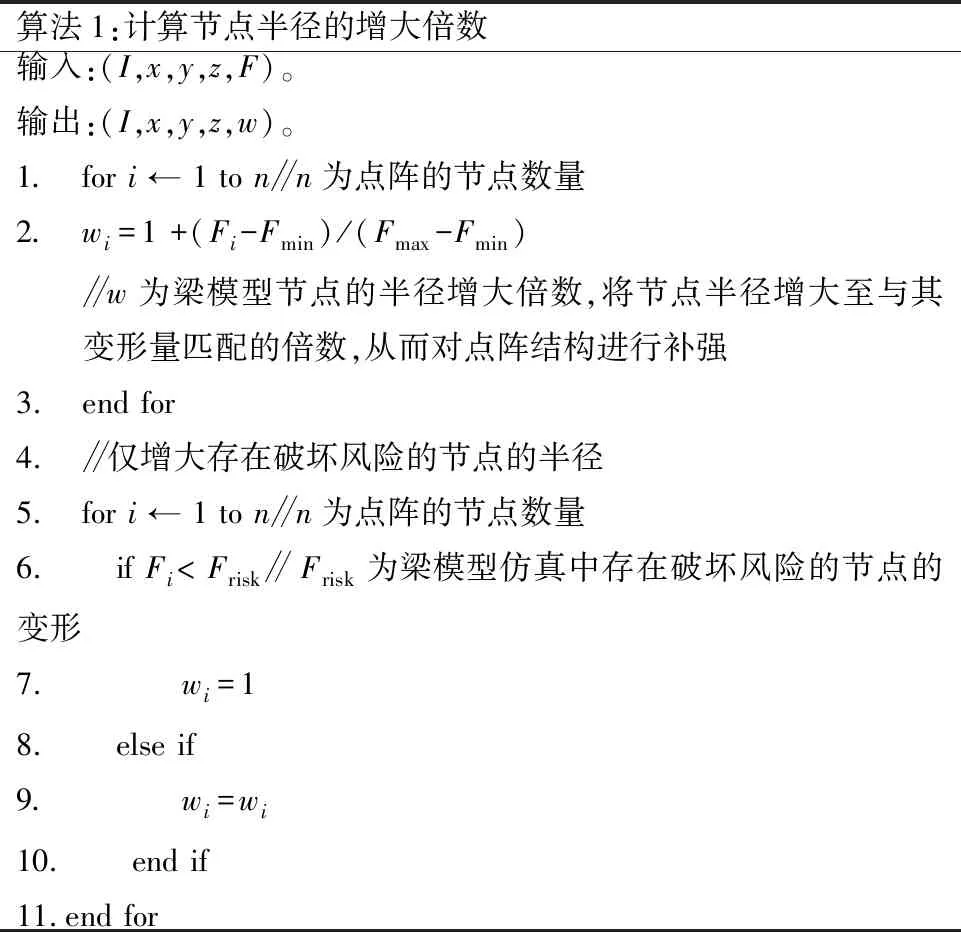
算法1:計算節點半徑的增大倍數輸入:(I,x,y,z,F)。輸出:(I,x,y,z,w)。1. for i ← 1 to n∥n為點陣的節點數量2. wi=1 +(Fi-Fmin)/(Fmax-Fmin)∥w為梁模型節點的半徑增大倍數,將節點半徑增大至與其變形量匹配的倍數,從而對點陣結構進行補強3. end for4. ∥僅增大存在破壞風險的節點的半徑5. for i ← 1 to n∥n為點陣的節點數量6. if Fi < Frisk∥ Frisk為梁模型仿真中存在破壞風險的節點的變形7. wi=18. else if9. wi=wi10. end if11.end for
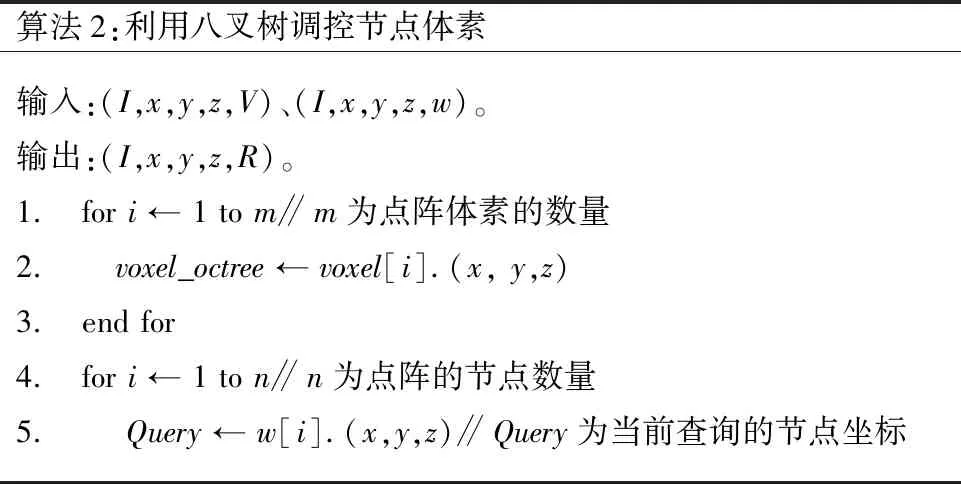
算法2:利用八叉樹調控節點體素輸入:(I,x,y,z,V)、(I,x,y,z,w)。輸出:(I,x,y,z,R)。1. for i ← 1 to m∥ m為點陣體素的數量2. voxel_octree ← voxel[i].(x, y,z)3. end for4. for i ← 1 to n∥ n為點陣的節點數量5. Query ← w[i].(x,y,z)∥ Query為當前查詢的節點坐標
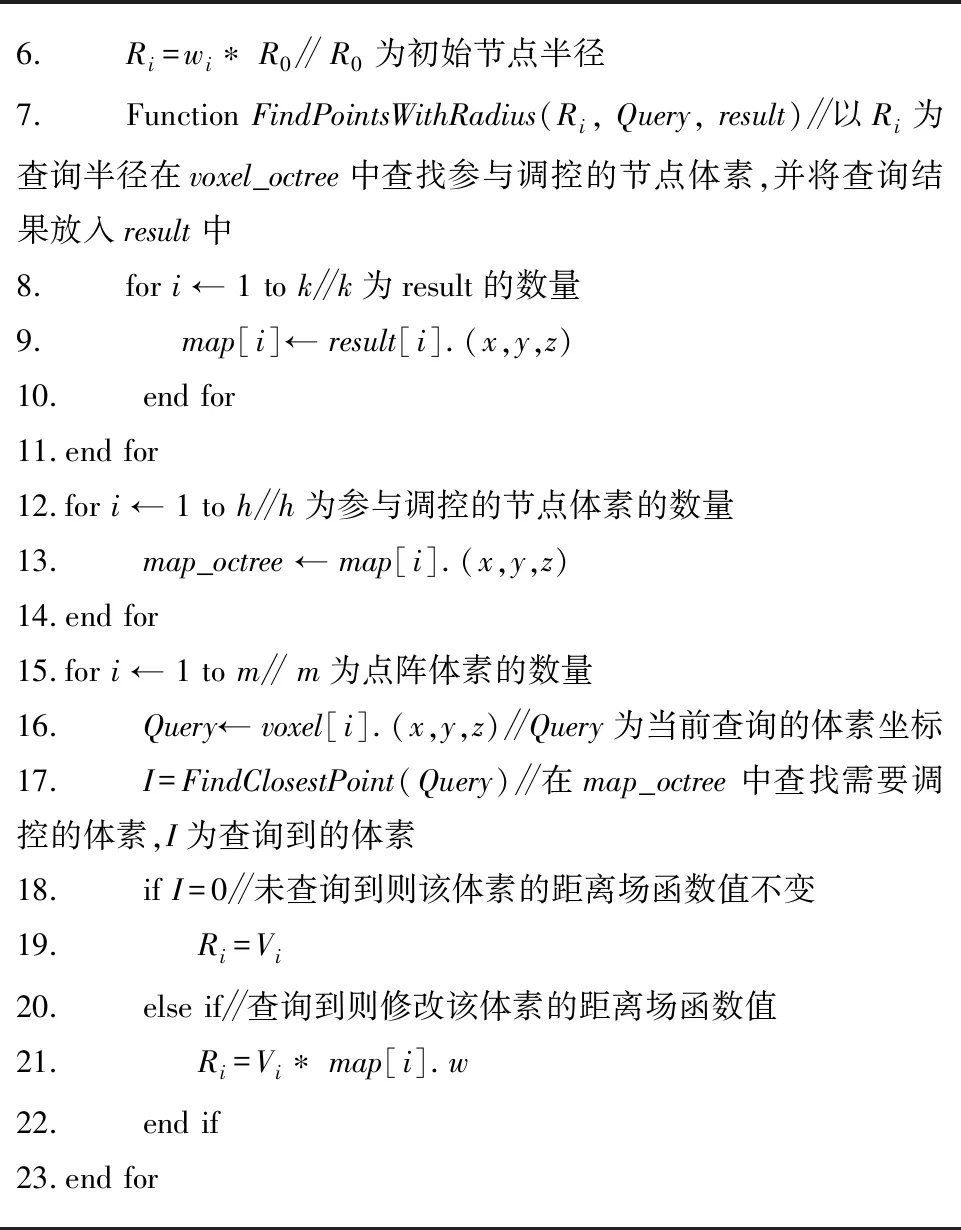
6. Ri=wi ? R0∥ R0為初始節點半徑7. Function FindPointsWithRadius(Ri, Query, result)∥以Ri為查詢半徑在voxel_octree中查找參與調控的節點體素,并將查詢結果放入result中8. for i ← 1 to k∥k為result的數量9. map[i]← result[i].(x,y,z)10. end for11.end for12.for i ← 1 to h∥h為參與調控的節點體素的數量13. map_octree ← map[i].(x,y,z)14.end for15.for i ← 1 to m∥ m為點陣體素的數量16. Query← voxel[i].(x,y,z)∥Query為當前查詢的體素坐標17. I=FindClosestPoint(Query)∥在map_octree 中查找需要調控的體素,I為查詢到的體素18. if I=0∥未查詢到則該體素的距離場函數值不變19. Ri=Vi20. else if∥查詢到則修改該體素的距離場函數值21. Ri=Vi ? map[i].w22. end if23.end for
2 實驗設計
2.1 實驗方法
為驗證所提方法的有效性,本節以齒輪為載體對輻板填充功能點陣結構,并通過振動實驗和承載實驗驗證點陣結構的功能特性和承載能力。實驗齒輪樣件的齒數為24,模數為6,內部填充點陣結構的輻板外圓、內圓的直徑分別為119 mm和54 mm,以光敏樹脂為材料,采用光固化成形工藝制造。如圖5所示,針對輻板的內外圓環面設計出共形點陣梁線,通過有限元模擬齒輪的振動工況,得到梁模型的振動仿真結果(圖5a)。通過對共形梁線構造體素化空間距離場并抽取等值面,得到共形點陣(圖5b)。為降低共形點陣齒輪的振幅,依據梁模型的振動仿真結果對共形點陣中強度不足的節點進行參數化調控,得到功能點陣(圖5c)。相比共形點陣,節點增強后的功能點陣質量有所增加,因此,為客觀評價功能點陣的功能特性,通過等比例增大共形點陣體素的距離場函數值,得到質量與功能點陣基本相同的增強型共形點陣(圖5d)。上述點陣齒輪的質量與轉動慣量如表2所示。
對實心齒輪S和共形點陣齒輪G組成的齒輪副S-G、實心齒輪S和增強型共形點陣齒輪Q組成的齒輪副S-Q、實心齒輪S和功能點陣齒輪F組成的齒輪副S-F進行振動性能檢測實驗。為保證3種齒輪副具有相同的測試工況,采用手持型轉速表對電機轉速進行檢測與調控。齒輪轉速的檢測方法如下:①將反光貼紙貼在電機輸出軸上;②齒輪轉動時,啟動手持型轉速表,發射出光束并將其始終對準電機輸出軸;③從手持型轉速表顯示器讀取齒輪轉速。通過分析齒輪副嚙合產生的振動信號,獲得不同齒輪副的加速度頻譜。加速度頻譜中,主頻振幅表征結構振動的最大變形,主頻振幅越大,結構振動越劇烈。因此,以主頻振幅為標準,評估點陣的振動性能。
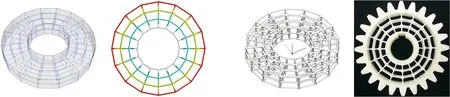
(a)共形梁線及其梁模型的振動仿真結果 (b)共形點陣
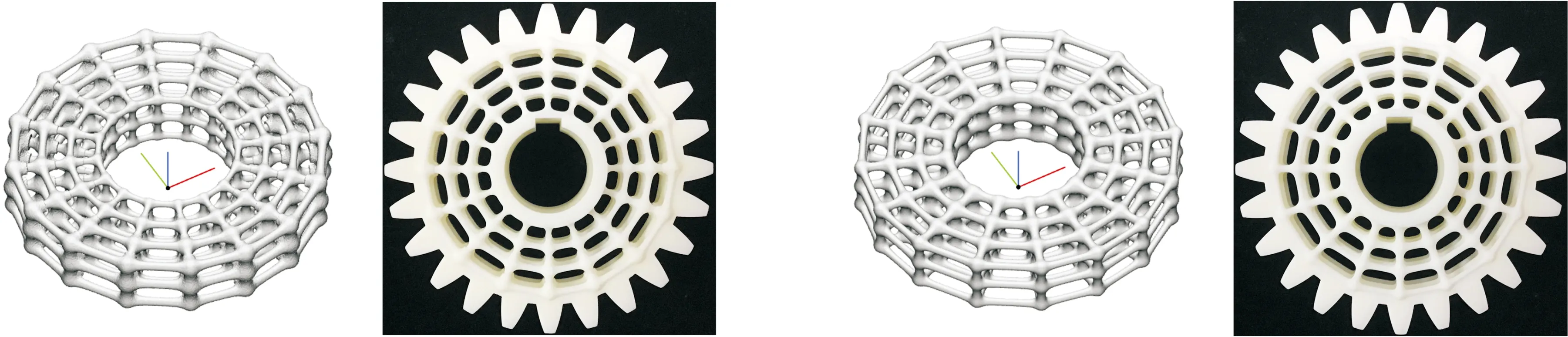
(c)功能點陣 (d)增強型共形點陣圖5 實驗齒輪樣件Fig.5 Experimental gears

表2 不同齒輪的質量與轉動慣量
承載能力檢測實驗中,以恒壓頻比的方式啟動電機,以齒輪斷裂時的電機變頻器示數為標準,評估點陣的承載能力。
2.2 實驗平臺搭建
實驗齒輪樣件的振動性能由搭建的振動檢測平臺檢測(圖6a),該平臺由傳動系統(圖6b)和信號分析系統組成。傳動系統包括1根傳動軸、1對軸承座、1臺調頻電動機、1個傳感器和1對待測齒輪副。1對待測齒輪副的中心距等于單個齒輪的分度圓直徑,以滿足齒輪副的嚙合要求。齒輪副的振動信號在傳動系統中產生。利用PCB加速度傳感器(型號8703450M1)采集待測齒輪副的振動信號,利用Spider-80XI模塊處理信號,最后由Crystal軟件將振動信號轉換為加速度頻譜。
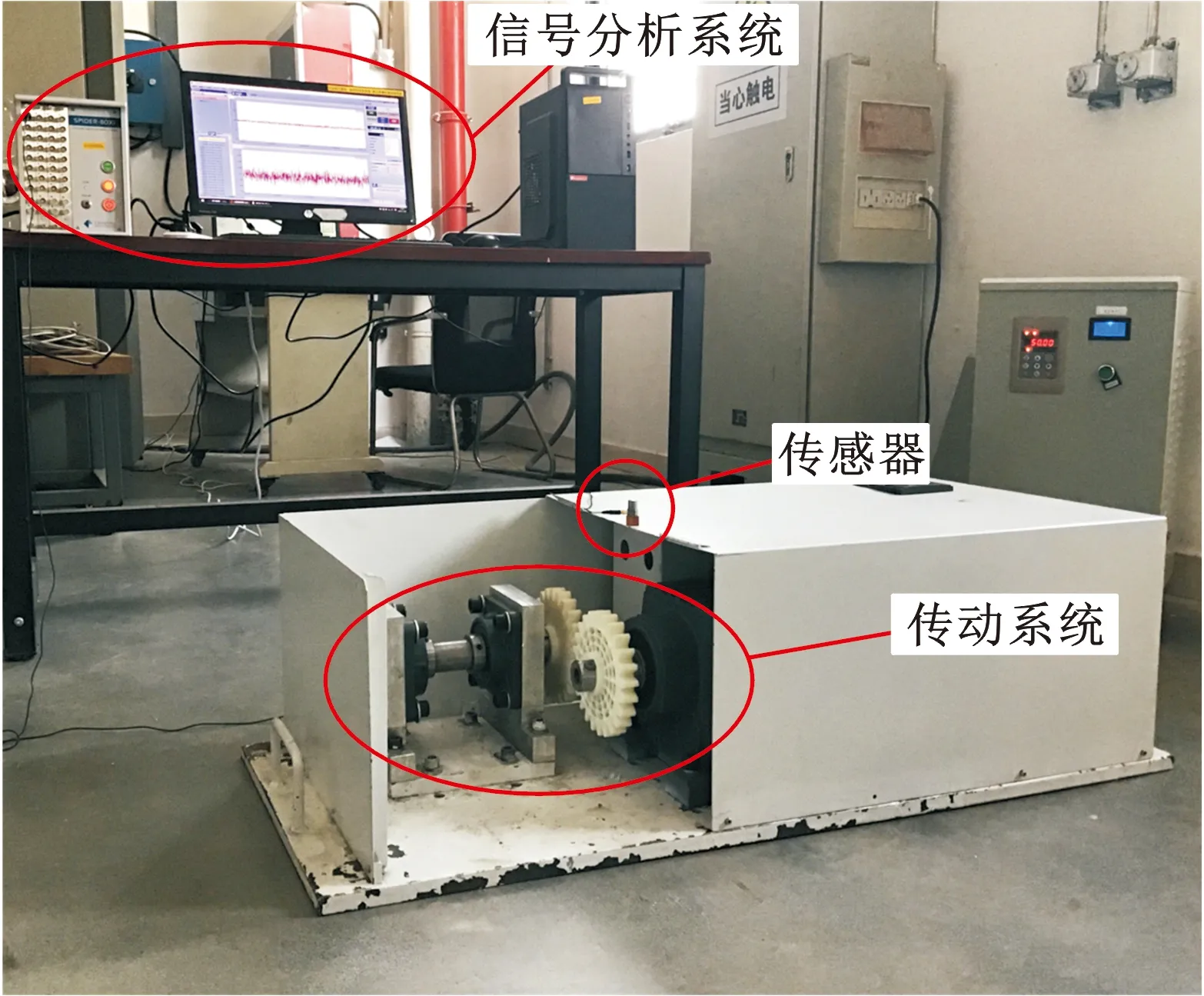
(a)振動檢測平臺
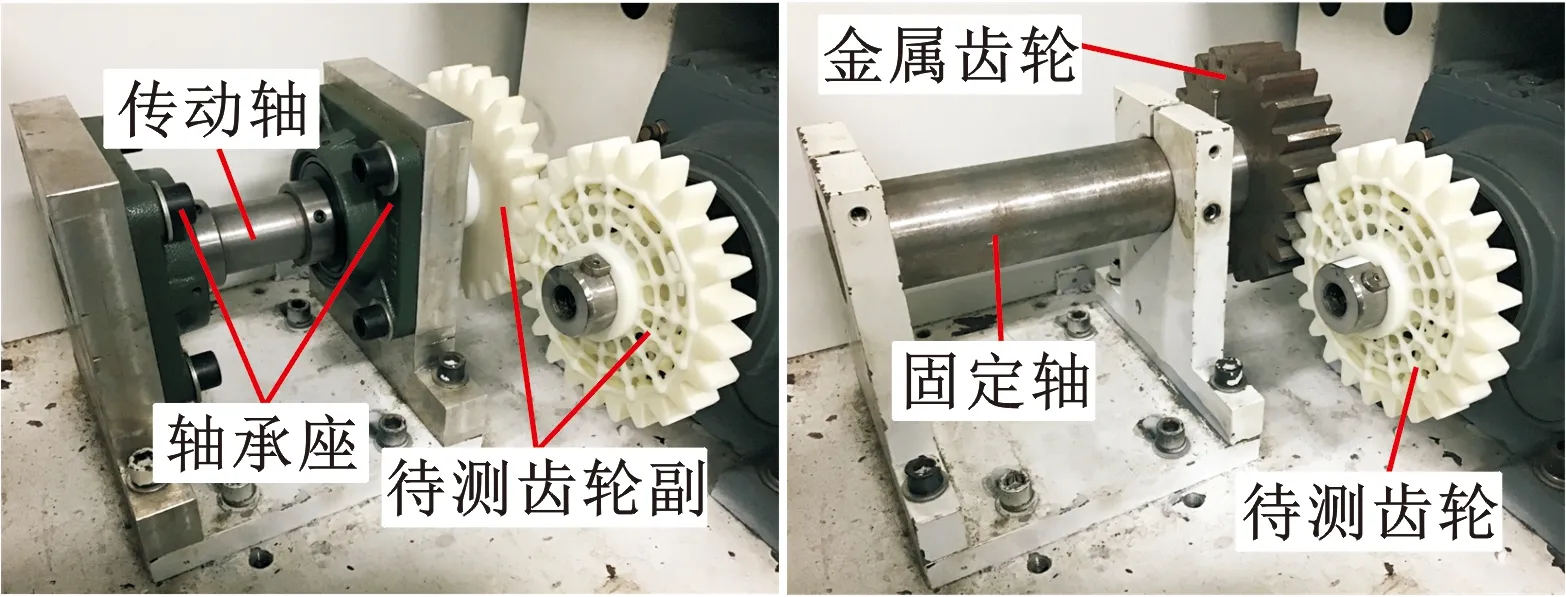
(b)傳動系統 (c)承載能力檢測平臺圖6 實驗系統搭建Fig.6 Experimental system construction
齒輪的承載能力在承載能力檢測平臺上檢測(圖6c)。該平臺由傳動系統改裝而得,即將傳動系統的傳動軸更換為固定軸后,在固定軸上安裝金屬齒輪。電機驅動待測齒輪轉動時,固定金屬齒輪不動,與其嚙合的待測齒輪也無法轉動,此時的電機轉速為0,轉差率為0,待測齒輪承受的是電機的啟動扭矩。變頻器以恒壓頻比的方式啟動電機,增大電機頻率可增大施加在待測齒輪上的扭矩,從而增大輪齒上的法向力。當法向力達到輪齒的極限載荷時,待測齒輪發生破壞。實驗過程中,輪齒上的法向力隨電機頻率的增大而增大,因此,通過對比齒輪破壞時的電機頻率,可對比點陣的極限載荷,進而對比其承載能力。
3 實驗結果
3.1 振動實驗
在電機的不同轉速下對3種齒輪副進行振動測試,測試結果如表3所示。電機轉速為80 r/min時,功能點陣的主頻振幅下降最多,下降了33.60%。
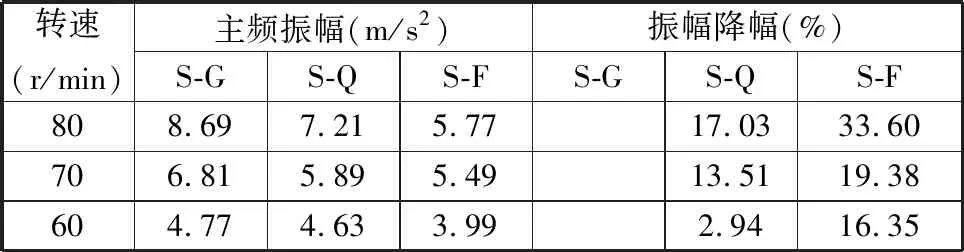
表3 不同電機轉速下的振動實驗結果
電機轉速為80 r/min時,重復3次振動實驗,3次振動實驗中的所有齒輪副的加速度頻譜如圖7所示。實驗結果如表4所示。增強型共形點陣和功能點陣的質量基本相同,但后者減振效果更好(相比前者,后者的主頻振幅下降了20.90%)。
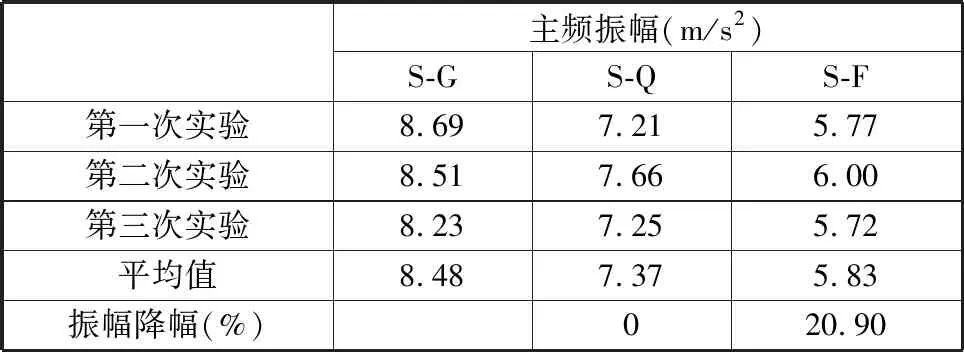
表4 80 r/min下的不同齒輪副的主頻振幅
3.2 承載實驗
采取有限元仿真及齒輪承載實驗來驗證功能點陣的承載能力。有限元仿真模型的網格在3-matic軟件中劃分,網格尺寸為1 mm,網格單元為四面體單元,約束設置為輪轂內表面固定,載荷為垂直于輪齒齒面的100 N法向力,加載位置在齒輪分度圓處,如圖8所示。有限元仿真模型中,材料密度為1.16 g/cm3,彈性模量為2.5 GPa,泊松比為0.41。
不同點陣的應力分布與破壞情況如圖9所示,承載實驗結果如表5所示。由圖9可知,共形點陣的桿結構存在密集的高應力區域,最大應力為14.70 MPa;增強型共形點陣桿結構的應力集中仍然存在,最大應力為6.25 MPa;功能點陣桿結構的應力集中有所減少,最大應力為5.76 MPa。
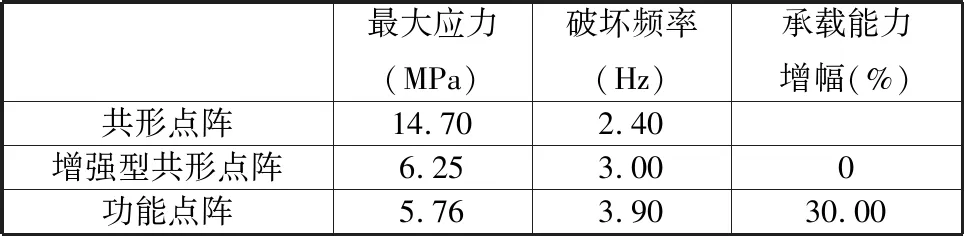
表5 承載實驗結果
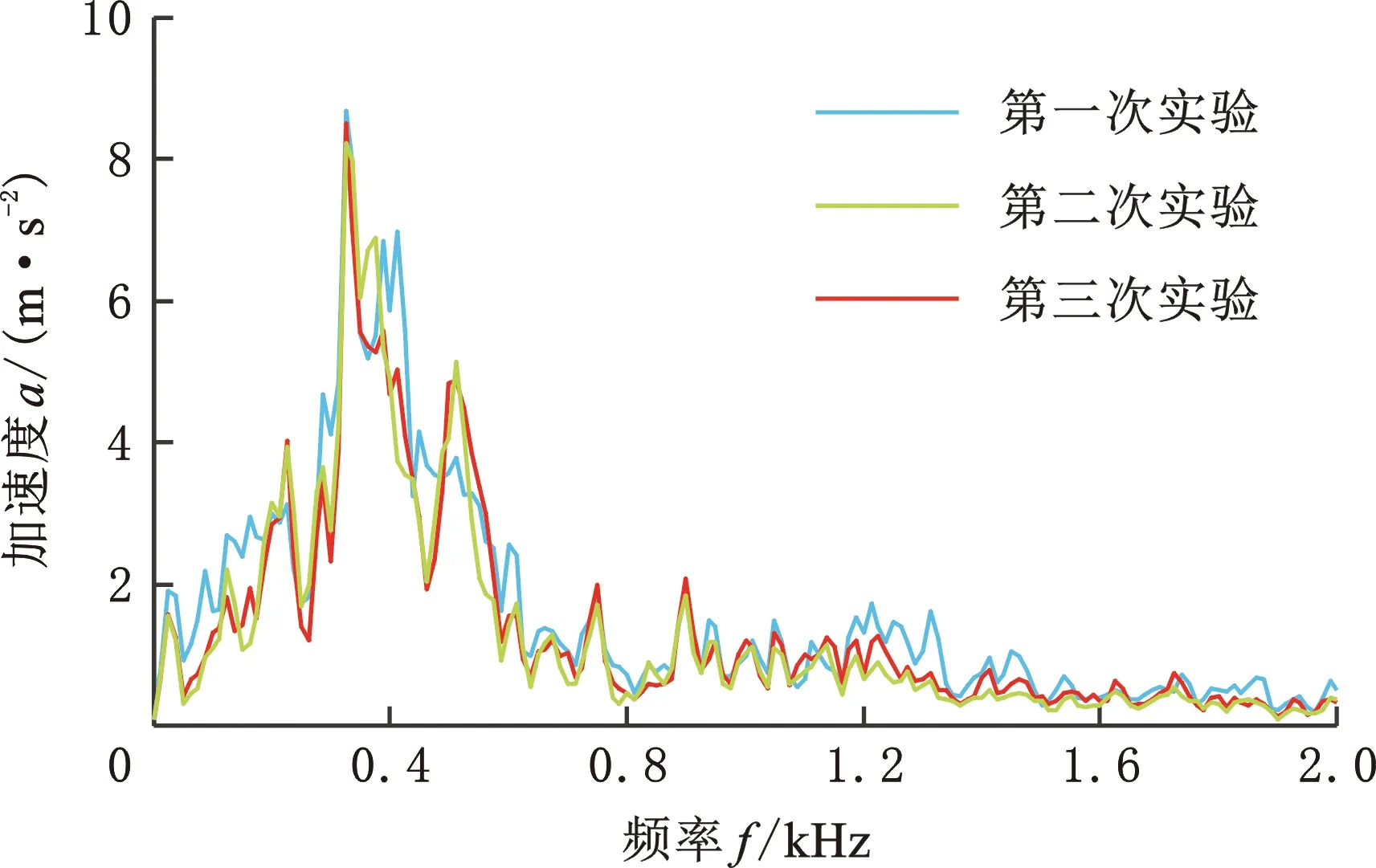
(a)齒輪副S-G
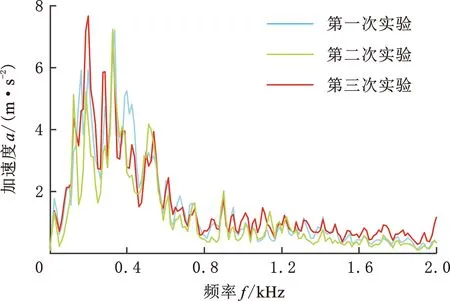
(b)齒輪副S-Q
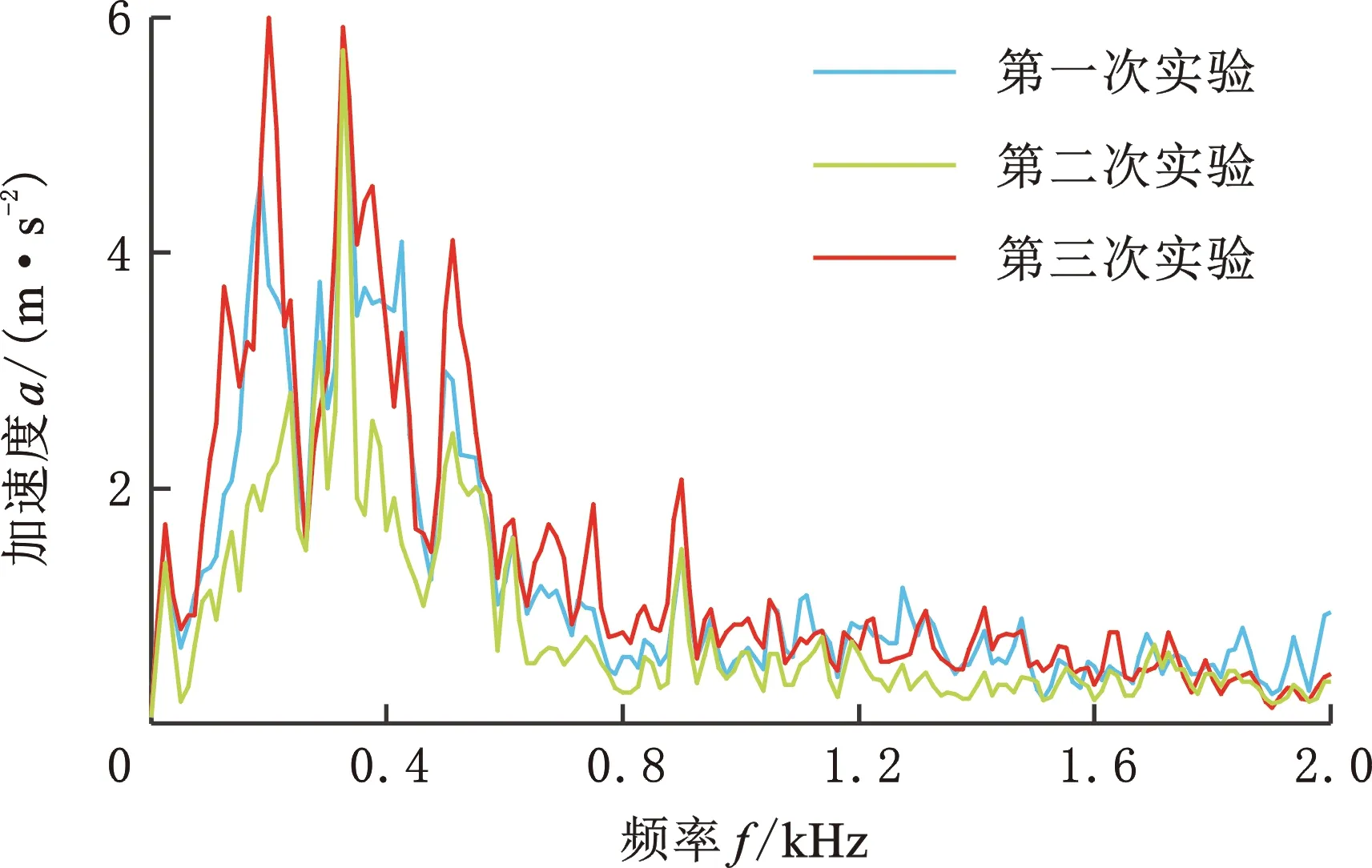
(c)齒輪副S-F圖7 3次振動實驗中的3種齒輪副的加速度頻譜Fig.7 Acceleration spectrum of three kinds of gear pairs in three times vibration experiments
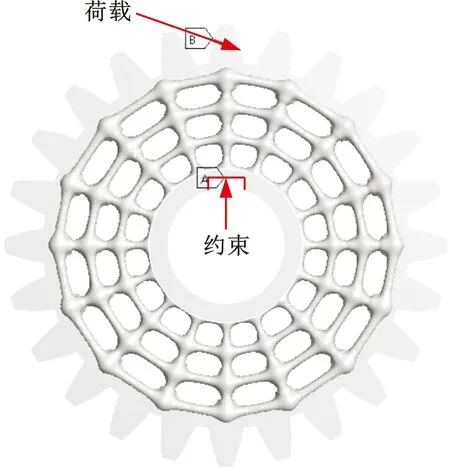
圖8 點陣結構的承載有限元模型Fig.8 Finite element model of lattice in loading experiment

(a)共形點陣
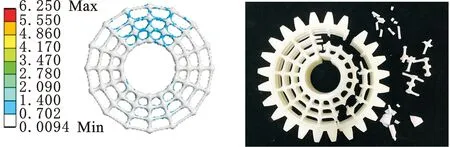
(b)增強型共形點陣
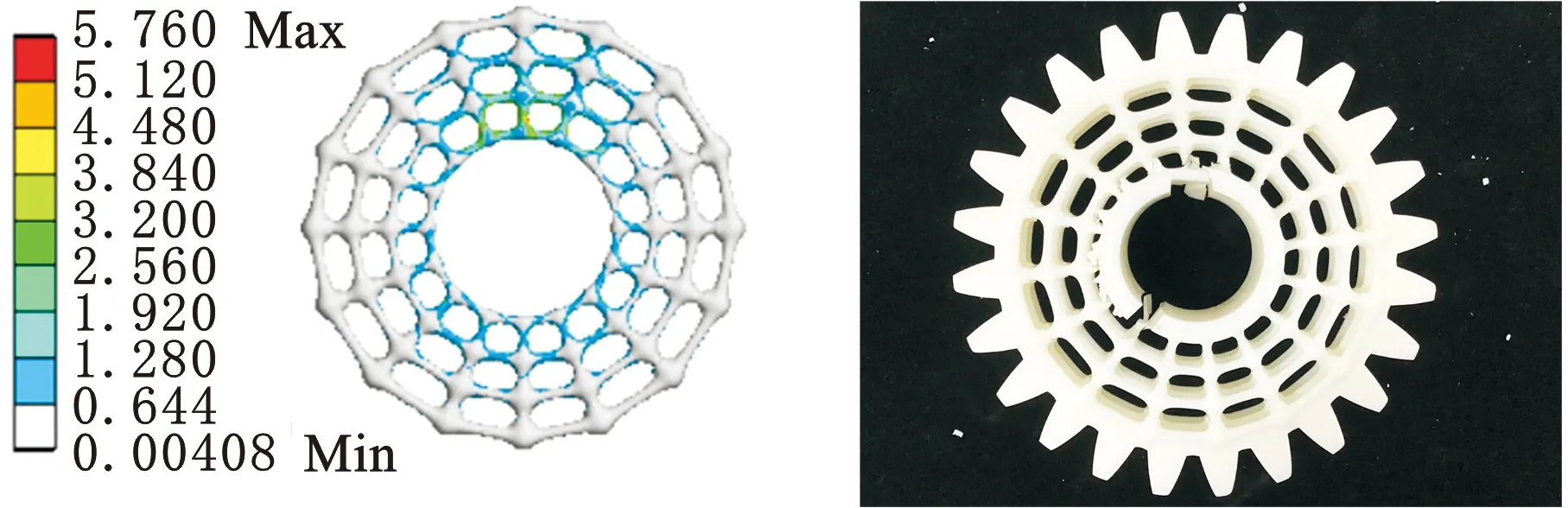
(c)功能點陣圖9 不同點陣的應力分布與破壞情況Fig.9 Stress distribution and fracture of different lattices
由破壞情況和承載實驗結果可知,共形點陣破壞時,其最內圈的所有桿結構斷裂,點陣與輪轂分離,破壞時的電機頻率為2.4 Hz;增強型共形點陣破壞時,部分桿結構隨輪轂和輪齒一起斷裂,其余桿結構保持完整,破壞時的電機頻率為3.0 Hz;功能點陣破壞時,最內圈的少數桿結構隨輪轂一起斷裂,大部分桿結構保持完整,破壞時的電機頻率為3.9 Hz。增強型共形點陣和功能點陣的質量基本相同,而功能點陣的承載能力更好,破壞頻率較增強型共形點陣提高了30.00%。
4 結論
(1)依據梁模型的振動仿真結果對強度不足的節點進行參數化調控,可在保證點陣結構自身輕量化效果的同時降低點陣結構的振幅。
(2)依據梁模型的振動仿真結果對強度不足的節點進行參數化調控,可減少周圍桿結構的應力集中,使點陣的承載能力得到充分發揮,從而能夠抵抗較大載荷。
(3)對比質量相同的點陣結構,功能點陣的主頻振幅降低了20.90%,承載能力提高了30.00%。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55