基于AUTOSAR的電子換擋控制器設計與實現*
2022-07-26 11:04:08朱江華周文華蘇晨曦郭修其高維
汽車技術 2022年7期
朱江華 周文華 蘇晨曦 郭修其 高維
(1.浙江大學,杭州 310027;2.寧波高發汽車控制系統股份有限公司,寧波 315100)
主題詞:電子換擋器 AUTOSAR 自學習算法 電機位置控制
1 前言
電子換擋器的主要技術特點是基于線控技術完成擋位信號采集、換擋邏輯判斷以及電驅動換擋輸出等。由電子換擋系統的工作原理可知,其關鍵技術包括:確保換擋響應時間及控制精度滿足系統要求;確保系統批量制造、裝配過程中產品性能的一致性和可靠性;控制系統在實現控制功能的同時還必須確保其軟、硬件滿足嚴格的功能安全要求。圍繞電子換擋器的相關關鍵技術,國內外高校與企業相繼開展了大量的研發工作和試驗研究。
國際標準化組織(International Organization for Standardization,ISO)于2011 年提出了適用于道路車輛的功能安全標準ISO 26262:2011,并在實踐中不斷對其進行更新完善。日益嚴苛的車輛安全要求無疑彰顯了ISO 26262 的重要性,而汽車開放系統架構(AUTomotive Open System ARchitecture,AUTOSAR)的提出,不僅可以極大限度地保證汽車電子控制系統的功能安全,還可以提高汽車電子軟件系統代碼的可移植性和可擴展性,并實現對現有應用層軟件的復用。國內外均對AUTOSAR 在電子控制單元(Electronic Control Unit,ECU)上的應用有較為深入的研究,并成功將其應用于各類汽車電控系統。
本文以AUTOSAR 層次化、模塊化的設計思想為基礎,基于電子換擋控制器的功能安全需求建立控制器軟件架構,利用功能安全認證軟件工具鏈完成底層基礎軟件和核心控制算法的開發,并在指定變速器上展開試驗驗證,通過內置通用校準協議(Universal Calibration Protocol,XCP)和第三方標定工具完成整機標定和性能監測。
2 電子換擋控制器硬件平臺及AUTOSAR軟件架構設計
2.1 電子換擋控制器硬件平臺設計
電子換擋控制器硬件系統采用雙芯片(主控芯片+監控芯片)硬件架構,如圖1 所示。其中,主控芯片選用英飛凌AURIX 微處理器TC234。該微處理器內置具有鎖步功能的校驗核,搭配硬件安全模塊(Hardware Security Module,HSM)、輸入/輸出監控(I/O Monitor,IOM)、錯誤檢查和糾正(Error Checking and Correcting,ECC)校驗等措施保證程序安全可靠地執行。監控芯片選用英飛凌公司的TLF35584,該芯片不僅能為主控芯片、傳感器提供穩定的工作電壓,還具有獨立的時間看門狗和窗口看門狗,為主控芯片提供較高的診斷覆蓋率。選用英飛凌公司的TLE92104 作為換擋電機的預驅芯片。所用芯片均達到汽車安全完整性等級(Automotive Safety Integrity Level,ASIL)C的要求。
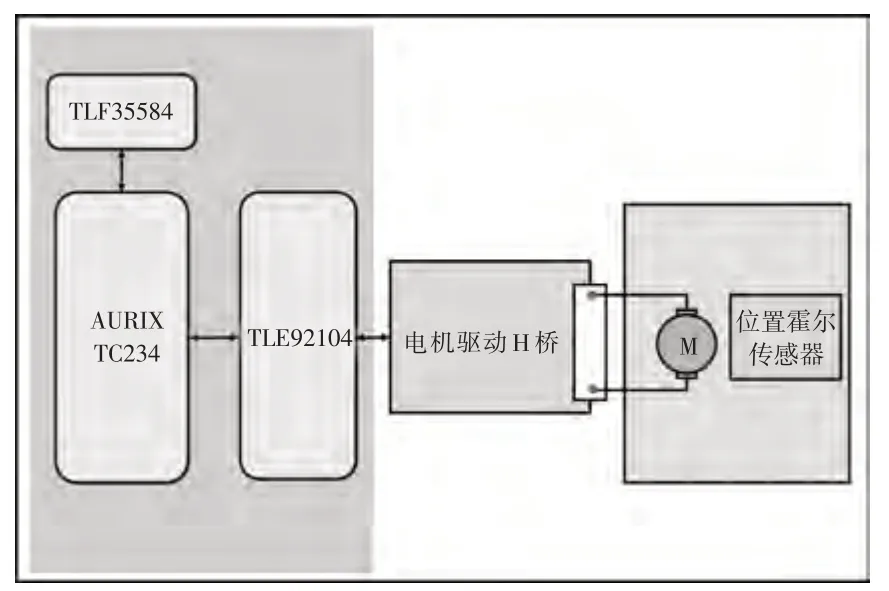
圖1 電子換擋控制器硬件架構示意
2.2 基于AUTOSAR的電子換擋控制器軟件架構設計
根據ISO 26262:2018,汽車電控系統的軟件架構設計準則包括:
a.軟件組件合理分層;
b.限制軟件組件的大小與復雜性;
c.限制接口的規模;
d.每個軟件組件內的高內聚;
e.限制軟件組件之間的耦合;
f.適當的調度特性;
g.限制中斷的使用;
h.適當的空間隔絕;
i.分享資源的合適管理。
AUTOSAR軟件架構將整個軟件系統合理劃分成應用層、運行時環境(Run-Time Environment,RTE)和基礎軟件(Basic Software,BSW)層,并且通過標準接口實現各模塊之間的獨立性,很好地滿足了上述準則的要求。根據電子換擋控制器的功能需求,其軟件架構設計如圖2所示。
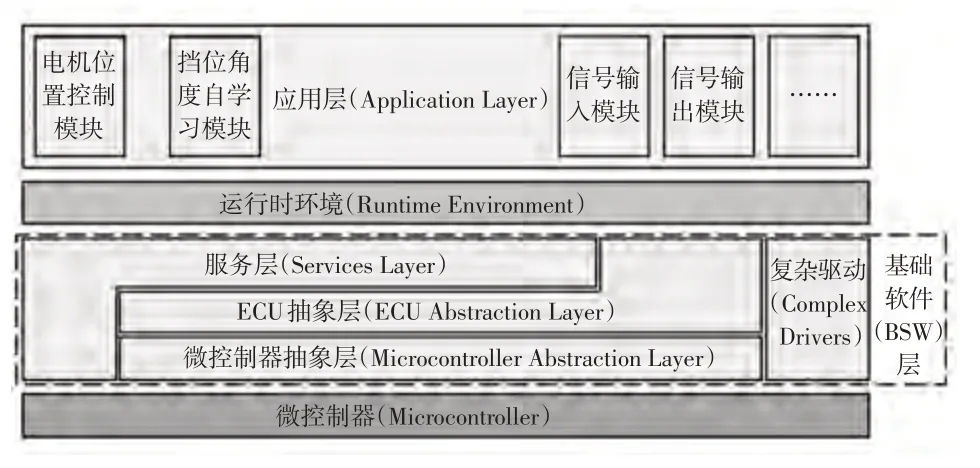
圖2 電子換擋控制器AUTOSAR軟件架構
軟件開發工作主要包括針對特定微處理器的基礎軟件層配置與開發、運行時環境配置和面向控制系統功能需求的應用層軟件開發。前兩者主要通過AUTOSAR工具平臺展開,后者通過MATLAB/Simulink圖形化開發工具及代碼自動生成工具實現。模塊化的應用層軟件組件架構設計由DaVinci Developer 完成,分層化的運行時環境與基礎軟件層的配置由DaVinci Configurator Pro完成,各模塊的描述符和配置均以一種稱為AUTOSAR XML(ARXML)的標準格式表示。特別地,使用EB Tresos Studio 工具配置微控制器抽象層(Microcontroller Abstraction Layer,MCAL)。
3 基礎軟件層及運行時環境設計與實現
3.1 基礎軟件層設計
AUTOSAR基礎軟件層結構如圖3所示,由4個部分組成:
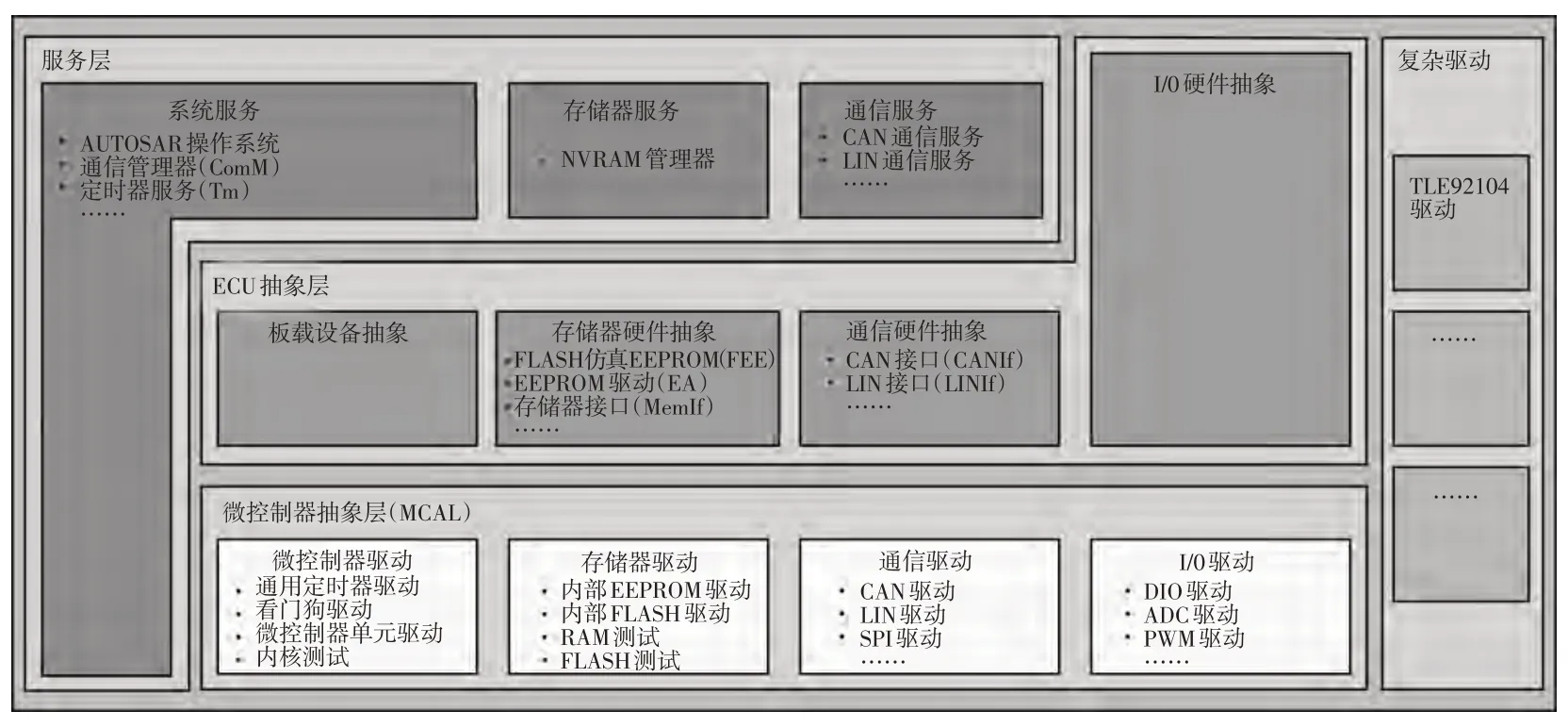
圖3 基礎軟件層結構
a.MCAL,該層位于基礎軟件層的最底部,包含了與主控芯片相關的驅動程序。本文利用EB Tresos Studio 對MCAL 進行配置,并基于ARXML 在DaVinci Configurator Pro 中對配置參數進行同步。
b.ECU 抽象層,該層對整個ECU 進行抽象與封裝,并提供統一的接口實現對存儲、通信與I/O 的訪問。圖4給出了I/O硬件抽象的配置與實現方案。應用層軟件組件不能直接調用MCAL 的接口讀取所需的輸入信號,只能通過I/O 硬件抽象的接口對MCAL 進行訪問。在DaVinci Developer 中完成對I/O硬件抽象模塊的架構設計和接口定義后,在生成的C 文件中手動添加代碼調用MCAL 對上層開放的應用程序接口(Application Programming Interface,API)函 數Dio_WriteChannel、Dio_ReadChannel等。
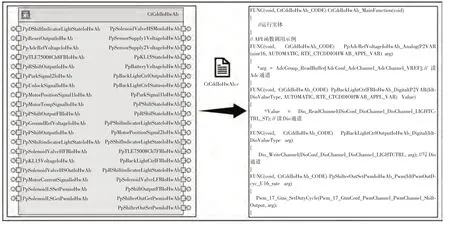
圖4 I/O硬件抽象配置與實現
c.服務層,該層位于基礎軟件層的最高層,為應用層和其他基礎軟件模塊提供基礎服務。服務層可以按照服務對象的不同分為系統服務、存儲器服務和通信服務。
除AUTOSAR 操作系統外,屬于服務層的模塊均與硬件無關。AUTOSAR操作系統作為系統服務中極為重要的一部分,通過任務管理、中斷處理、事件機制、資源管理等措施對整個電子換擋器的控制系統進行實時管理。
d.復雜驅動,該模塊橫跨MCAL、ECU 抽象層和服務層。復雜驅動雖然在AUTOSAR 中無法被標準化,但是具有執行AUTOSAR 接口的強大邊界能力,因此可以實現處理復雜傳感器和執行器的特定功能。如圖5所示,以換擋電機的預驅芯片TLE92104 的驅動程序為例,在DaVinci Developer 中完成對該模塊的運行實體(Runnable)設計與接口定義后,在生成的C文件中根據芯片應用原理對驅動程序進行配置。
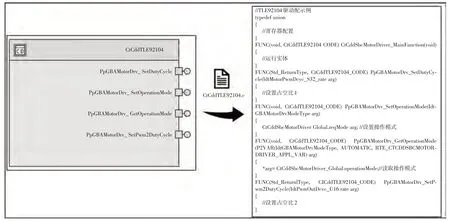
圖5 TLE92104驅動配置與實現
3.2 運行時環境設計
RTE 位于應用層與基礎軟件層之間,是AUTOSAR虛擬功能總線(Virtual Function Bus,VFB)的具體實現。如圖6所示,RTE提供標準化的通信接口保證應用層軟件組件之間、應用層軟件組件與基礎軟件層之間的通信。其中,通過S/R接口實現數據的傳輸,通過C/S接口完成服務的調用。
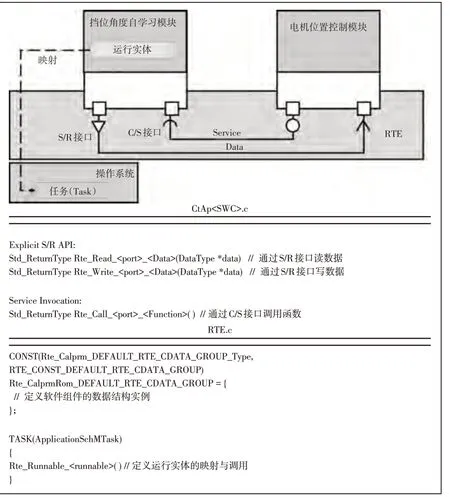
圖6 RTE配置與實現
RTE 實現對運行實體的管理與調度。運行實體作為用戶程序的最小劃分單元,操作系統無法直接對其進行調度。RTE 為運行實體提供必要的觸發事件與資源,并將運行實體映射到操作系統的任務中,通過對任務的調度實現運行實體的執行。如圖6 所示,在生成的RTE 實現文件(RTE.c)中,定義了運行實體的映射與調用。
4 應用層軟件組件設計
應用層包括擋位輸入及換擋邏輯判斷模塊、擋位角度自學習模塊、換擋電機位置控制模塊以及其他輔助模塊,相應軟件組件在DaVinci Developer 中完成設計與配置并導出對應的ARXML文件。在MATLAB/Simulink中導入ARXML 文件并完成各模塊的圖形化開發以及代碼自動生成。這里給出電子換擋控制器的2 個核心功能組件,即擋位角度自學習算法和換擋電機位置控制算法的設計與實現過程。
4.1 擋位角度自學習算法
擋位角度自學習的目的是保證不同換擋機構、不同擋位均能找到目標擋位的精確位置。擋位角度自學習算法的設計需滿足:覆蓋變速器零部件在制造和裝配過程中可能出現的差異性,保證換擋過程的精準控制;自學習方法對不同的換擋機構具有一定的普適性。
圖7所示為某變速器的電子換擋器換擋機構,同類變速器的換擋機構均具有如下類似特征:
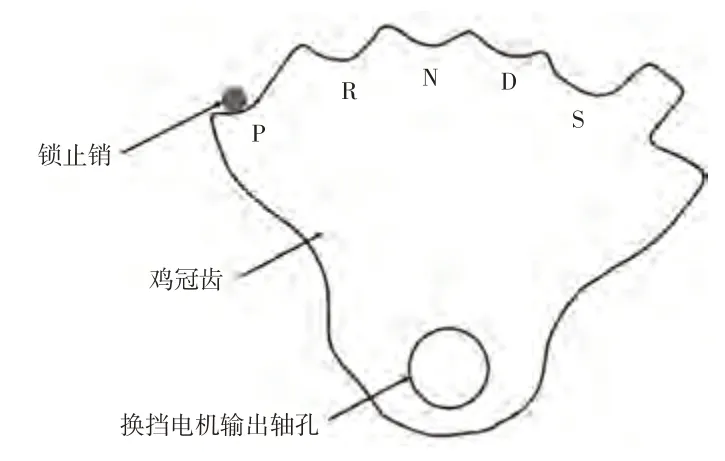
圖7 電子換擋器換擋機構示意
a.精確的擋位定位都處在雞冠齒槽底部中央,而底部中央附近存在較寬的近似對稱的平緩區域,鎖止銷由于阻力的作用可停留在該區域的任意位置,進而影響定位精度;
b.不同換擋機構、不同擋位的雞冠齒槽底部平緩區域的寬窄程度存在差異;
c.鎖止銷離開底部區域時受到的阻力會明顯增大,此時有別于底部區域的特征是微小增加的驅動力矩不會導致鎖止銷與雞冠齒相對位置發生明顯變化。
如圖8所示,換擋電機輸出微小的驅動電流即可保證鎖止銷在雞冠齒底部區域左右擺動,在步進增加電流時擺動范圍不斷增大,當某一時刻增加的驅動電流不能導致擺動范圍擴大時,即可認為鎖止銷已經到達離開底部區域的臨界點。
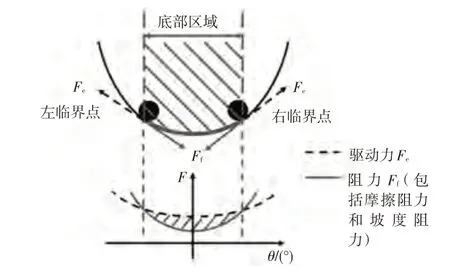
圖8 鎖止銷受力分析示意
自學習算法的要點是:
a.驅動電流須確保鎖止銷在雞冠齒槽底部區域明顯擺動,防止因摩擦阻滯而產生對臨界點的誤判;
b.臨界點的判斷須在雞冠齒大范圍運動時,避免因靜摩擦而產生不確定性;
c.對底部特征差異比較大的驅動機構建立不同的邊界判斷條件。
根據上述特征在Stateflow 中設計擋位角度自學習算法,如圖9 所示。自學習開始之后,首先閉環控制換擋電機輸出至初始目標擋位位置,然后開環輸出振蕩微小脈沖使換擋電機左右擺動以尋找左右臨界點,并記錄換擋電機角度(規定向右為換擋電機角度增大方向)。根據記錄的左右擺動結束后的換擋電機角度驗證是否滿足邊界判斷條件。若滿足,表明該擋位角度自學習結束;若不滿足,步進增加換擋電機驅動電流后繼續進行邊界判斷條件的驗證。
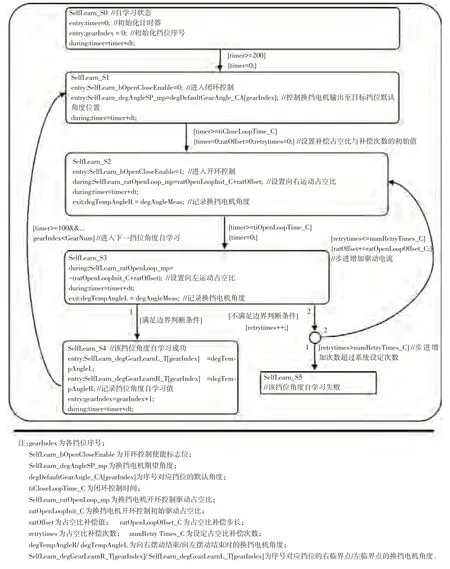
圖9 擋位角度自學習算法Stateflow模型
4.2 換擋電機位置控制算法
在換擋電機驅動過程中,電子換擋執行機構的顯著特點是負載變化激烈,激烈變化的負載特性對快速、精確的換擋電機位置控制提出了很高的要求。基于上述特性,本文采用雙閉環PID 來控制換擋電機位置,即換擋電機角度閉環控制和速度閉環控制。其中,主控制環為角度閉環,用于確保換擋電機角度的穩態精度以及動態跟蹤性能,副控制環為速度閉環,用于抑制換擋電機在負載突變時的轉速波動。
在Simulink中搭建該控制算法的圖形化模型,如圖10所示。其中,換擋電機角度PID模塊和速度PID模塊被封裝成子系統,內置抗積分飽和模塊。PID控制參數分別與換擋電機角度和換擋電機轉速相關。考慮到換擋電機驅動電流對整個控制過程可能產生的影響,在雙閉環的輸出環節增加換擋電機實際電流對最終占空比輸出的限值模塊。
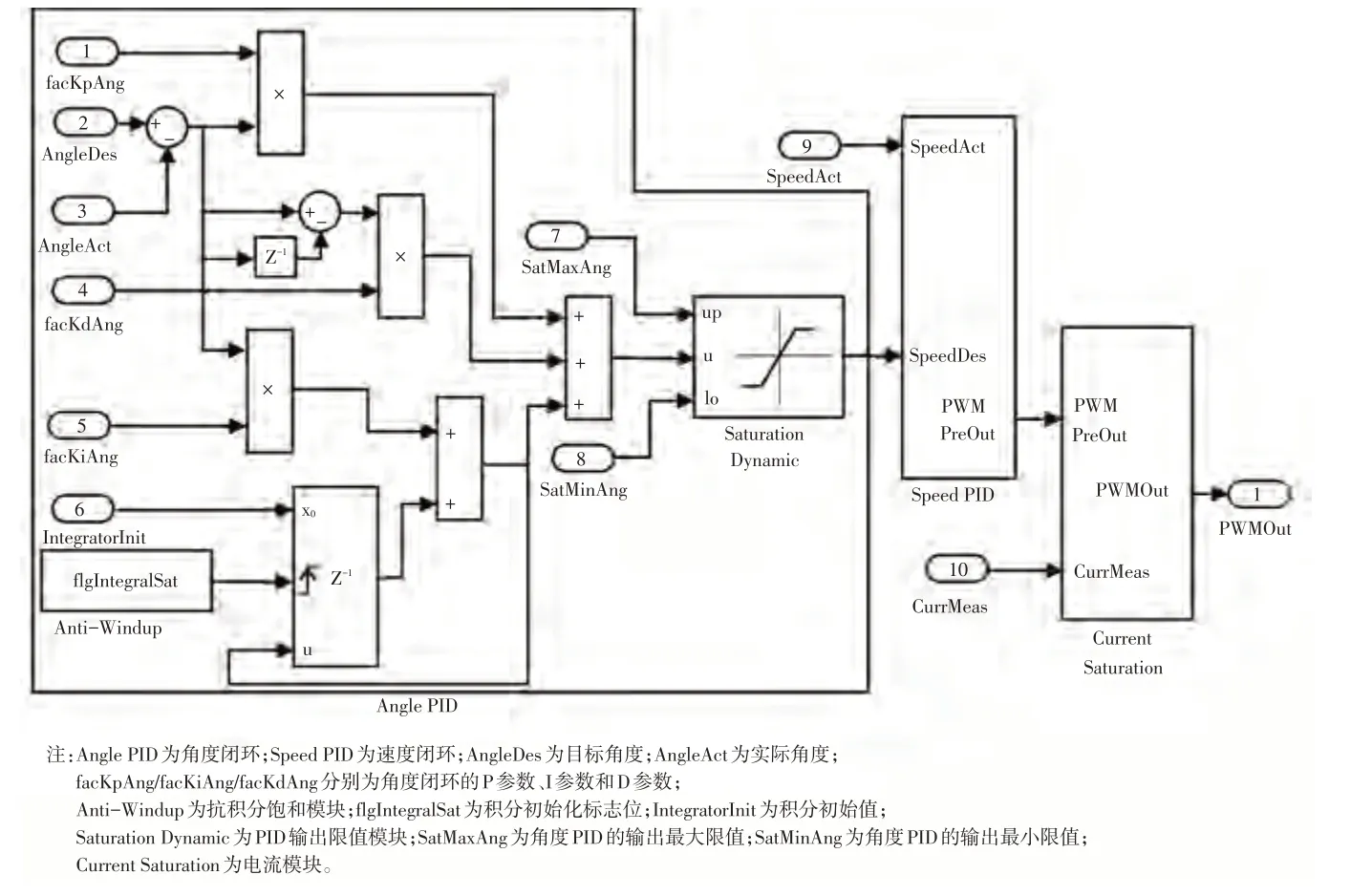
圖10 換擋電機位置控制算法Simulink模型
5 試驗驗證
完成應用層軟件組件設計、RTE設計與基礎軟件層設計等工作后,通過DaVinci 工具和Embedded Coder 工具生成相應的源代碼,并利用TASKING將源代碼編譯、鏈接成可執行文件(HEX)。
系統設計完成后在上汽通用五菱汽車股份有限公司CTF25 變速器上展開驗證試驗。該變速器使用2 個直流有刷電機作為執行單元完成P/R/N/D/S 擋位的切換,利用MLX90365霍爾芯片檢測換擋電機位置并輸出電壓模擬信號至換擋控制器。換擋執行器的結構如圖11所示。

圖11 換擋執行器結構
試驗過程基于XCP on CAN 協議在ETAS INCA 上建立監控和標定平臺。通過英特佩斯ValueCan3 建立主機與從機之間的CAN通訊。測試平臺如圖12所示。
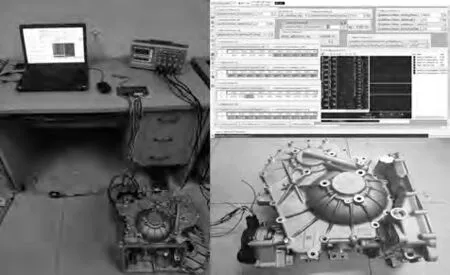
圖12 電子換擋控制器測試平臺
5.1 擋位角度自學習算法驗證
擋位角度自學習算法要求各個擋位多次自學習結果的偏差不超過0.5°。整個自學習過程的換擋電機驅動脈沖寬度調制(Pulse Width Modulation,PWM)占空比變化與換擋電機角度變化如圖13所示。擋位角度自學習過程中,通過每個擋位步進增加驅動電流找到左右臨界點角度,滿足擋位角度自學習成功的條件后進入下一擋位角度的自學習。
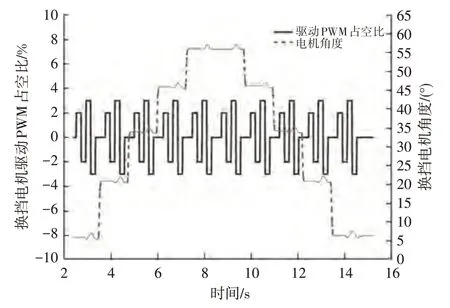
圖13 擋位角度自學習過程的換擋電機驅動PWM占空比和換擋電機角度變化
自學習過程中INCA 自動記錄每個擋位的自學習角度。該自學習算法經過了充分的試驗驗證,圖14 所示為其中隨機選取的50 組擋位角度自學習結果的分布情況,具體的數據分析結果如表1 所示。結合圖14與表1 可以發現,各擋位自學習角度偏差均不超過0.5°,且各次自學習的結果表現出了極高的一致性,表明該自學習算法具有極高的魯棒性,滿足變速器的性能要求。
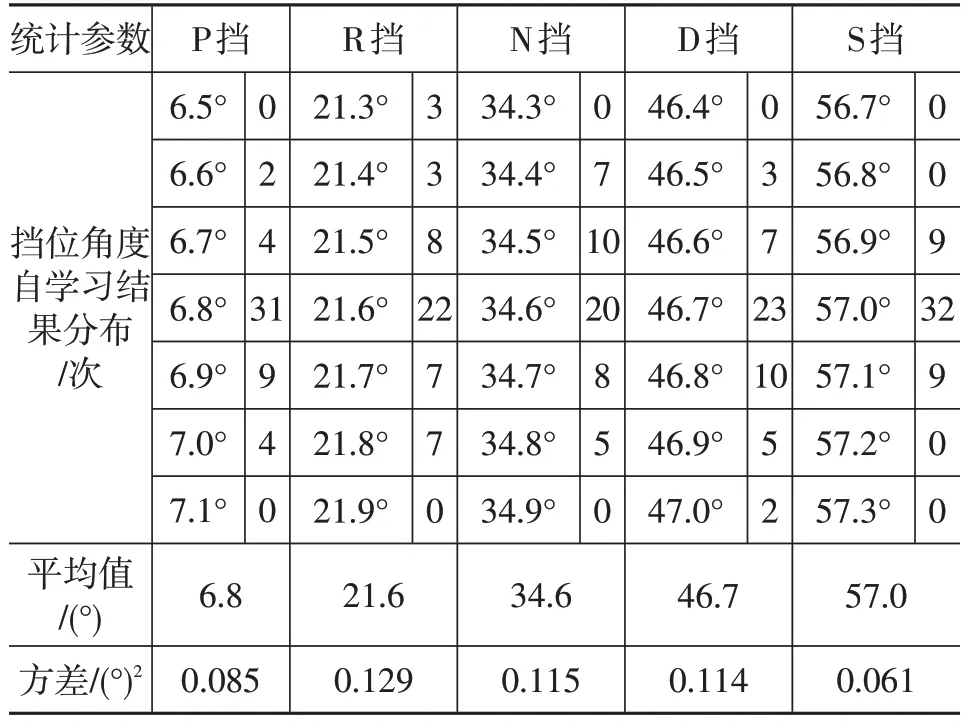
表1 擋位角度自學習結果分析
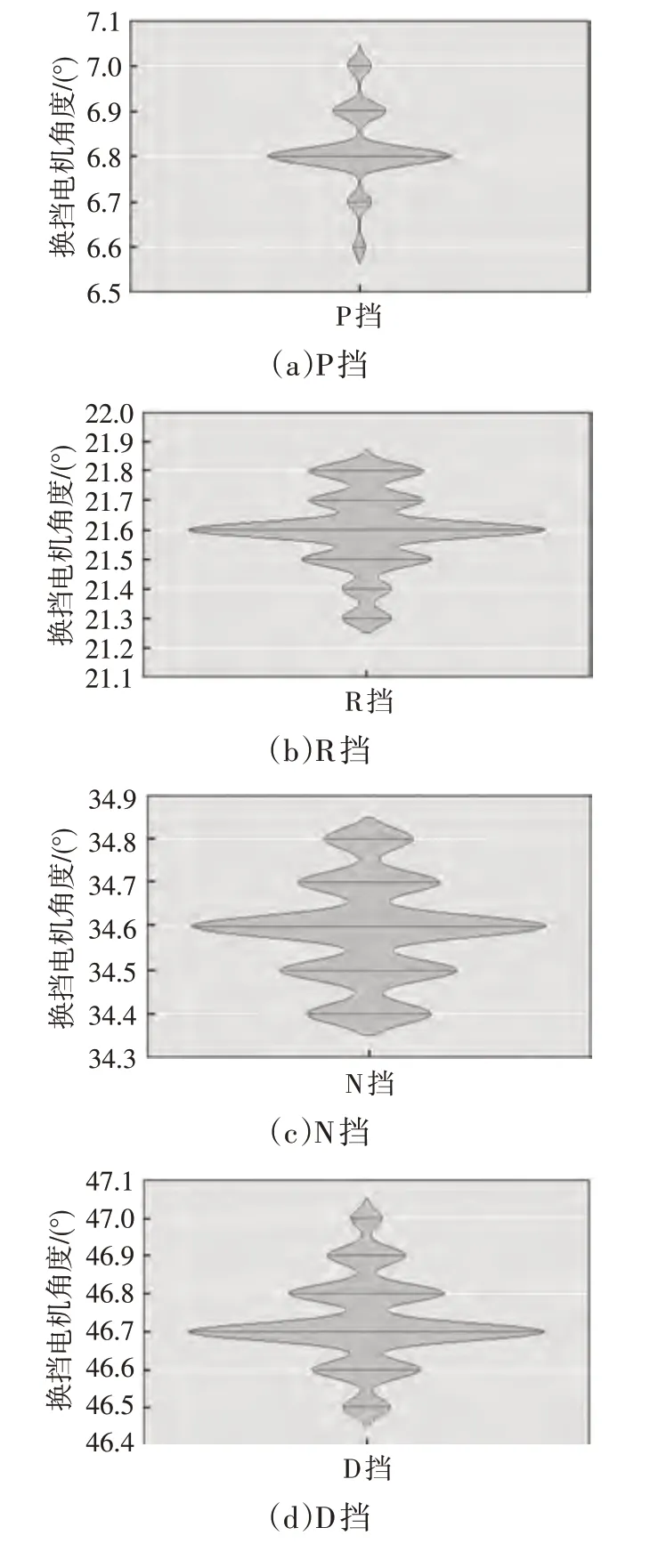
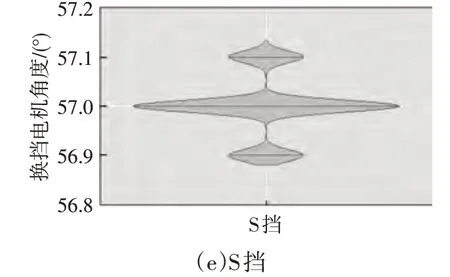
圖14 各擋位的擋位角度自學習結果分布情況
5.2 換擋電機位置控制算法驗證
換擋電機位置控制要求為:相鄰擋位之間的換擋時間不超過150 ms;目標擋位角度靜態偏差不超過0.5°。根據擋位角度自學習算法得到各擋位的準確角度,并按照上述角度進行換擋電機位置控制算法的驗證,結果如圖15所示。
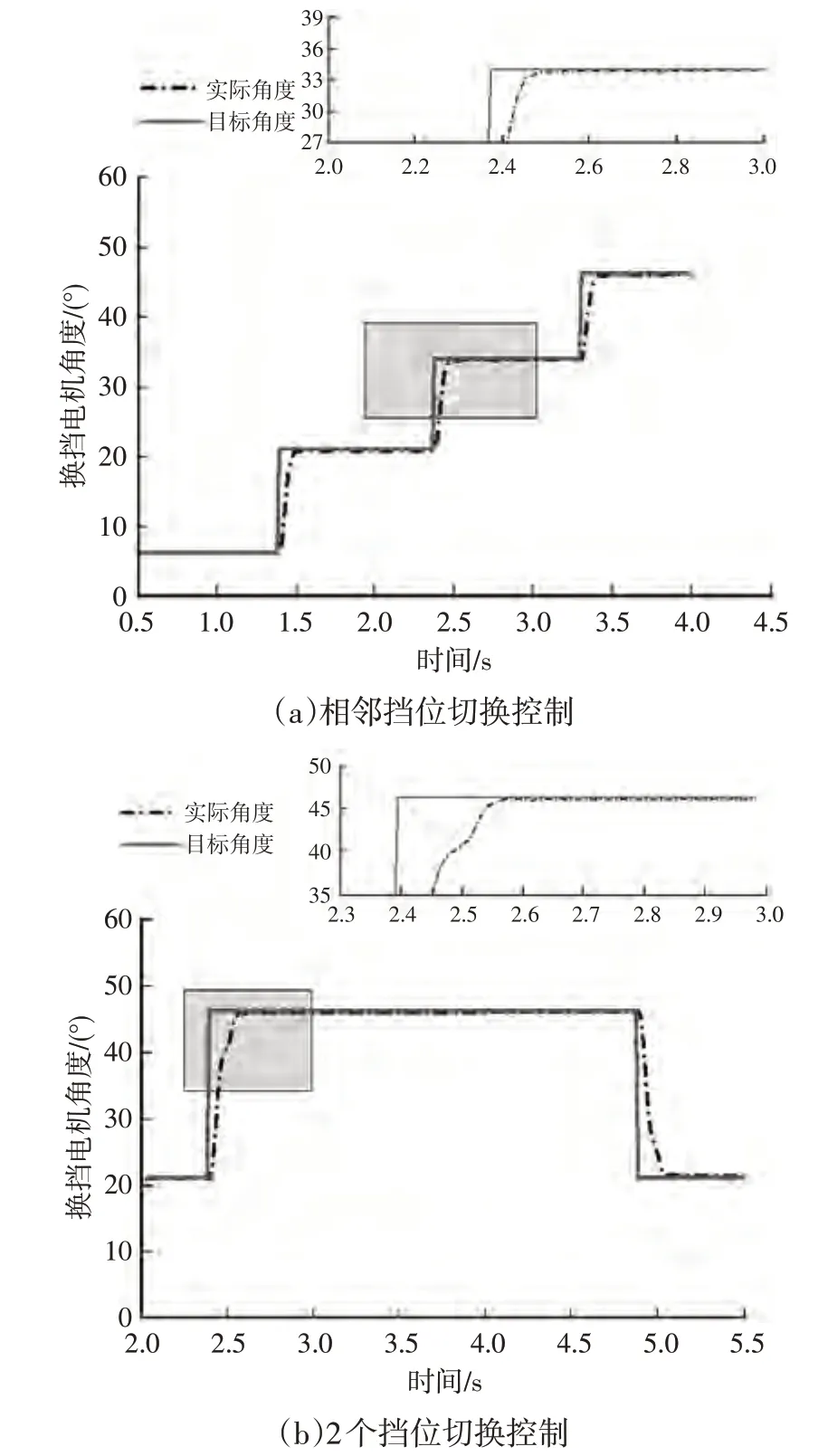
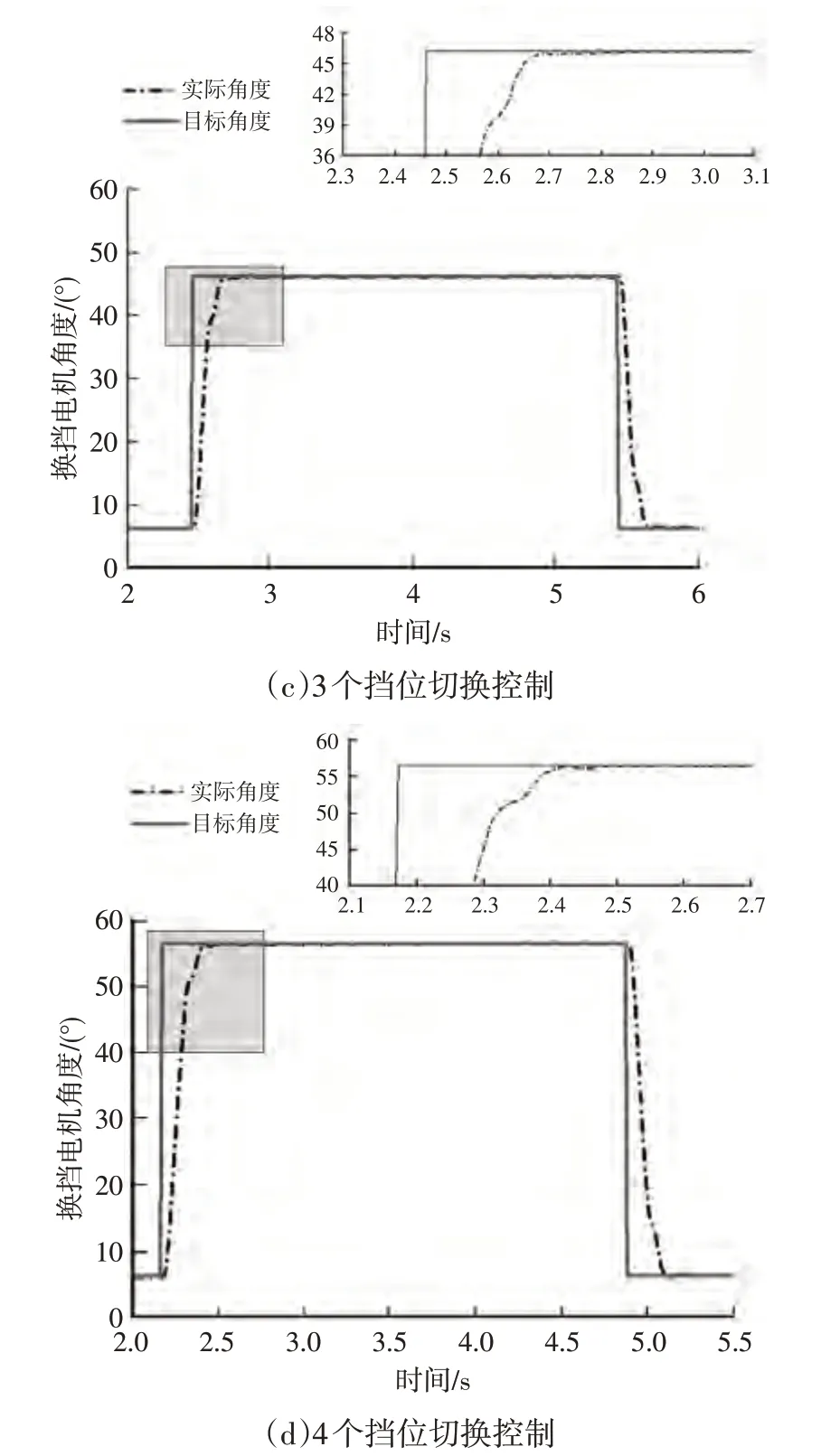
圖15 不同擋位間隔換擋電機位置控制結果
由圖15 可得,在不同擋位間隔的換擋中電機位置控制均取得了比較理想的控制效果。換擋時間和目標角度偏差(見表2)均在性能要求范圍以內。
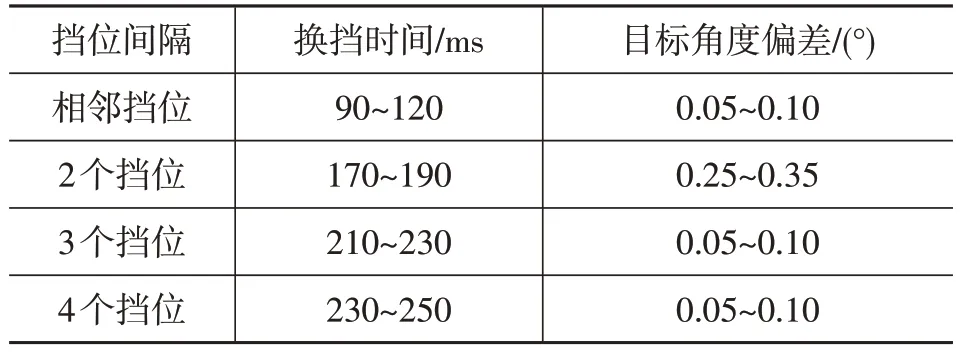
表2 不同換擋間隔的換擋時間與目標角度偏差
6 結論
本文基于AUTOSAR 完成了電子換擋控制器軟件架構設計,通過MATLAB/Simulink 和AUTOSAR 平臺相關工具完成了控制器應用層、基礎軟件層和運行時環境的設計,開發了擋位角度自學習算法和換擋電機位置雙閉環控制算法,以英飛凌TC234 微處理器為硬件平臺,在上汽通用五菱的CTF25 型CVT 變速器上展開了試驗驗證。試驗結果表明:該擋位角度自學習算法具有良好的自學習精度,能夠保證各擋位角度多次自學習的偏差遠小于0.5°,可以確保生產制造過程中的系統一致性;該換擋電機位置控制算法具有良好的響應速度和角度控制精度,能夠滿足整車換擋性能的控制要求。