直流微電網并聯儲能系統改進下垂控制策略
2022-07-26 13:55:26王嘯塵陳劍月孫欣宇
自動化與儀表 2022年7期
關鍵詞:分配
張 晨,王嘯塵,陳劍月,孫欣宇
(江蘇大學 電氣信息工程學院,鎮江 212013)
為了推動實現可持續發展和節能減排目標,包含光伏、風電等清潔能源的微電網越來越受到關注[1]。與交流微網相比,直流微網與可再生能源之間的互連更加簡單高效,直流系統中也不存在優化無功分布,抑制諧波等問題,因此更有發展優勢[2]。在獨立直流微網中,可再生能源具有隨機性和波動性,需加入儲能系統為負載提供不間斷的電力[3-4]。為提高高功率水平分布式能源中儲能側變換器的可靠性,通常對變換器采取并聯連接,其輸出功率可按照要求進行擴展,同時并聯變換器之間具有更快的動態響應速度[5]。當DC-DC 變換器并聯運行時,各變換器之間功率是否平均分配,電壓調節是否在規定范圍內顯得尤為重要。下垂控制是最常見的方法[6],其具有即插即用、無需高頻通信等優點[7-8]。然而實際運行過程中,傳統的下垂控制會因為系統線纜阻抗的存在和變換器的參數誤差而出現功率分配不均及循環電流的現象[9],當流經某并行模塊的電流較大時,不僅增大開關的損耗,還會使變換器過載[10]。為此,國內外學者展開了很多研究。
文獻[11]為改善下垂控制參數采用虛擬阻抗方法,但需要在并網時獲取信息得到虛擬阻抗,微電網無法孤島運行。文獻[12]通過注入微小脈沖電壓的方式獲取信息來改變下垂系數,但其誤差會隨著線路阻抗及等效電容的減小而放大。文獻[13]以輸出電流和母線電壓變化率來改進下垂控制,但母線電壓的穩定和儲能系統之間電流的分配精度不能同時兼顧。文獻[14]提出一種自適應下垂控制,通過PI 控制器自適應調節下垂參數,用另一個自適應PI控制器的次級環路調節直流微網總線電壓,但它對通信要求很高。
上述的研究方法雖然能夠改善線纜阻抗及變換器的參數誤差對傳統下垂策略帶來的影響,但改進策略較繁瑣、對通信要求高。為此,本文提出一種改進方法,以調節控制算法修改并聯變換器電壓設定點改善上述問題,該方法通過測量公共耦合點的電壓、電流,就能滿足并聯系統對電壓、電流的分配要求,無需在轉換器之間建立通信。通過仿真和實驗證明改進方法的有效性。
1 傳統下垂控制策略
如圖1所示,直流微網并聯儲能系統包含了儲能單元、并聯連接的變換器、線纜電阻、負載單元[15]。圖1中:upcc為直流母線電壓;Ii為變換器輸出電流;usi為儲能單元電壓;Rci為線路阻抗;R 為負載;Iload為負載電流。并聯變換器間采用下垂控制,通過給定的下垂參數可以控制儲能系統之間的電流分配[16],傳統下垂控制表達式為
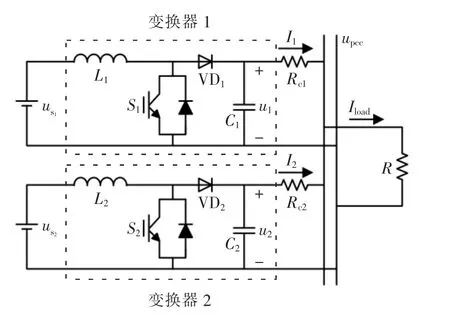
圖1 并聯儲能系統結構簡化圖Fig.1 Simplified structure of parallel energy storage system

式中:ui為第i 臺變換器端口實際電壓;urefi為設定電壓,Ii為下垂控制電流;Rdi為給定的下垂系數。
在小規模系統中,線路阻抗可忽略不計,由下垂參數進行功率分配[17],然而當直流微網規模很大時,電流分配的精度會因線路阻抗的存在而降低。考慮線路阻抗時,由圖1可得:

聯立式(1)和式(2),可求得電流分配的比例關系:

由式(3)可知,電流分配因為線路阻抗的不同而不同;且變換器的電感、電容等參數在實際運行中也會存在誤差,加劇電流分配誤差,使得變換器無法按照給定下垂參數進行功率分配。
2 改進下垂控制策略
2.1 阻抗誤差消除控制算法
由上述分析可知,傳統下垂控制方法中的均流效果由并聯變換器的下垂系數決定,但線纜阻抗的存在會降低并聯系統的電流分配精度和電壓穩定性[18]。為消除線路阻抗所帶來的影響,本文通過變換器耦合點的電流和負載電壓信息,求得電壓修正量,修正變換器的電壓設定點,以此消除線路阻抗對傳統下垂參數所造成的影響,提高了系統穩定性。求取電壓修正量過程如下所示:
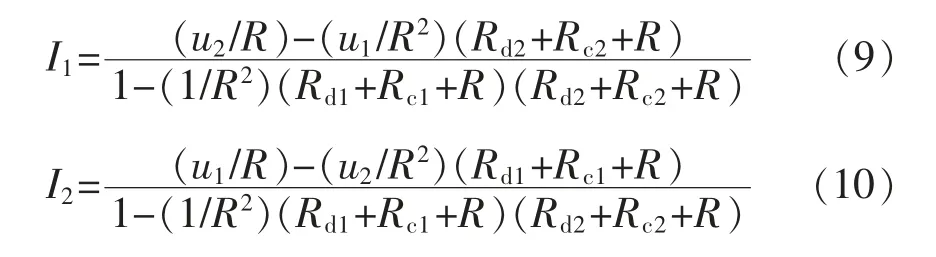
考慮線路阻抗時,電纜電阻會在公共耦合點改變下垂特性,負載電壓可以用變換器1 或變換器2的輸出電流表示如下:
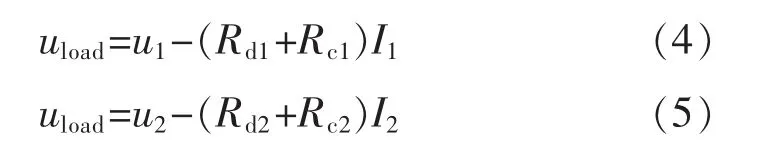
負載總電壓uload和變換器電流Ii,線路阻抗R 關系如下:

將式(6)代入式(4)和式(5)可獲得每個變換器的空載電壓,將式(4)和式(5)改寫如下:
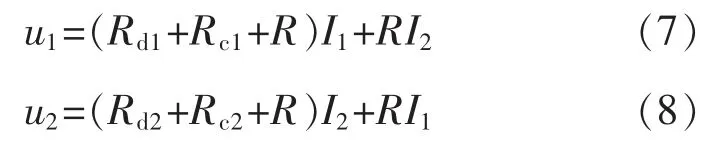
通過求解式(7)和式(8),就可獲得2 個并聯變換器的輸出電流估算值:
基于估算的變換器輸出電流和負載電壓值,可得到第i 個變換器的輸出電壓uoutput-i:

利用直流母線測得的額定電壓值與第i 個變換器的估計輸出電壓值做差,求得電壓修正量ΔV。因此,可通過ΔV 重新設定變換器的控制電壓,使負載電流能夠被每個變換器所共享,補償電壓下跌。圖2為改進控制方法控制策略框圖。
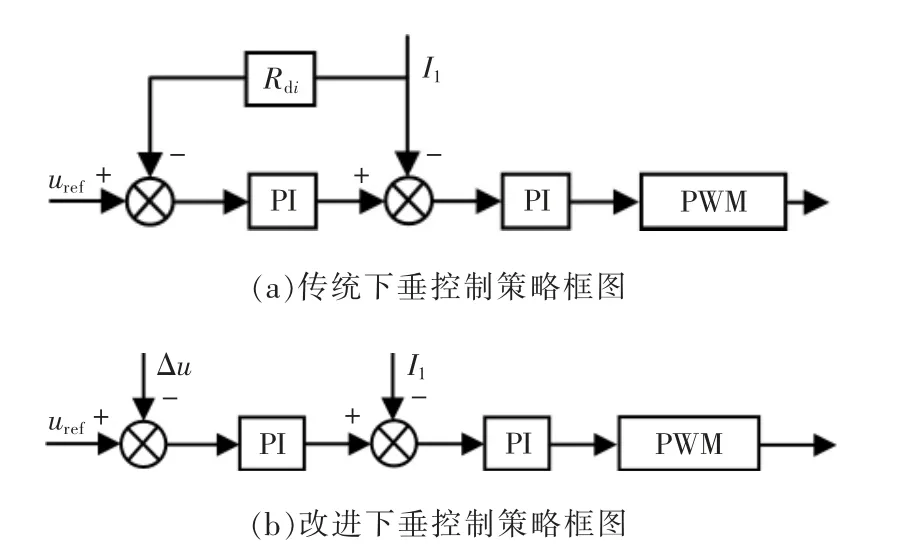
圖2 控制策略對比框圖Fig.2 Control strategy comparison block diagram
2.2 參數誤差補償控制算法
由2.1 節分析可知,線路阻抗造成的電流、電壓誤差可利用改變變換器在下垂控制中的電壓設定點來消除。但實際運行過程中,變換器自身電感、電流等參數誤差也會產生環流現象[19],為進一步精準分配電流,減小環流影響,對電流控制提出一種新的算法,通過將變換器和負載的電流值進行比較,將另一電壓修正量加入控制環節,從而更好地提升電流分配的精度。
控制算法流程如圖3所示,其作用是減小參數誤差對變換器帶來的影響,通過測量總負載和變換器的輸出電流值,計算出第i 個變換器電流共享百分比PCS:

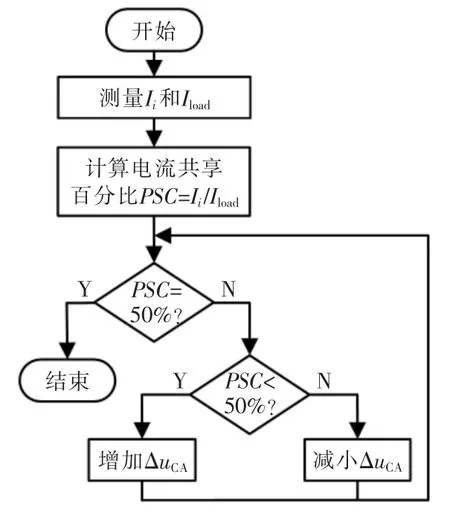
圖3 控制算法流程Fig.3 Control algorithm flow chart
由于2 個并聯變換器均分總負載的電流,所以并聯時,第i 個變換器輸出的電流值的大小應為總負載電流值的一半。因此,當第i 個變換器在輸出電流占比高于一半時,需減小電壓補償量ΔuCA以降低電壓設定值;相反,在輸出電流占比低于一半時,變換器的電壓設定值應增加ΔuCA的電壓補償量。通過上述算法可實現并聯變換器之間電流的精確分配。但是,如圖4所示,在實現電流均等共享的過程中,轉換器的電流預設變化區間會在期望工作點附近產生較小的振蕩現象。因此,必須選擇適當的ΔuCA值以減小電流振蕩對系統穩定性帶來的影響。除此之外,當負載調節特性的下垂參數在轉換器中表現較高時(即K>K′時),可實現所期望的工作點附近的振蕩影響最小。
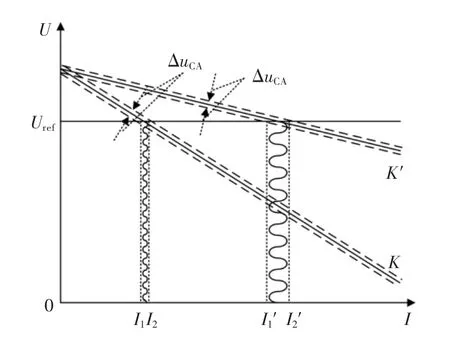
圖4 不同下垂參數下期望點電流振蕩Fig.4 Current oscillation at desired point under different droop parameters
本文中選擇的ΔuCA較小,2 個下垂系數的取值在工作點附近產生的電流波形振蕩也可忽略。所提的2 種控制算法同時使用時,通過對線路阻抗和參數誤差進行分析,引入2 種電壓設定點補償法,有效地解決了電流分配過程中存在的問題,系統總控制框圖如圖5所示。
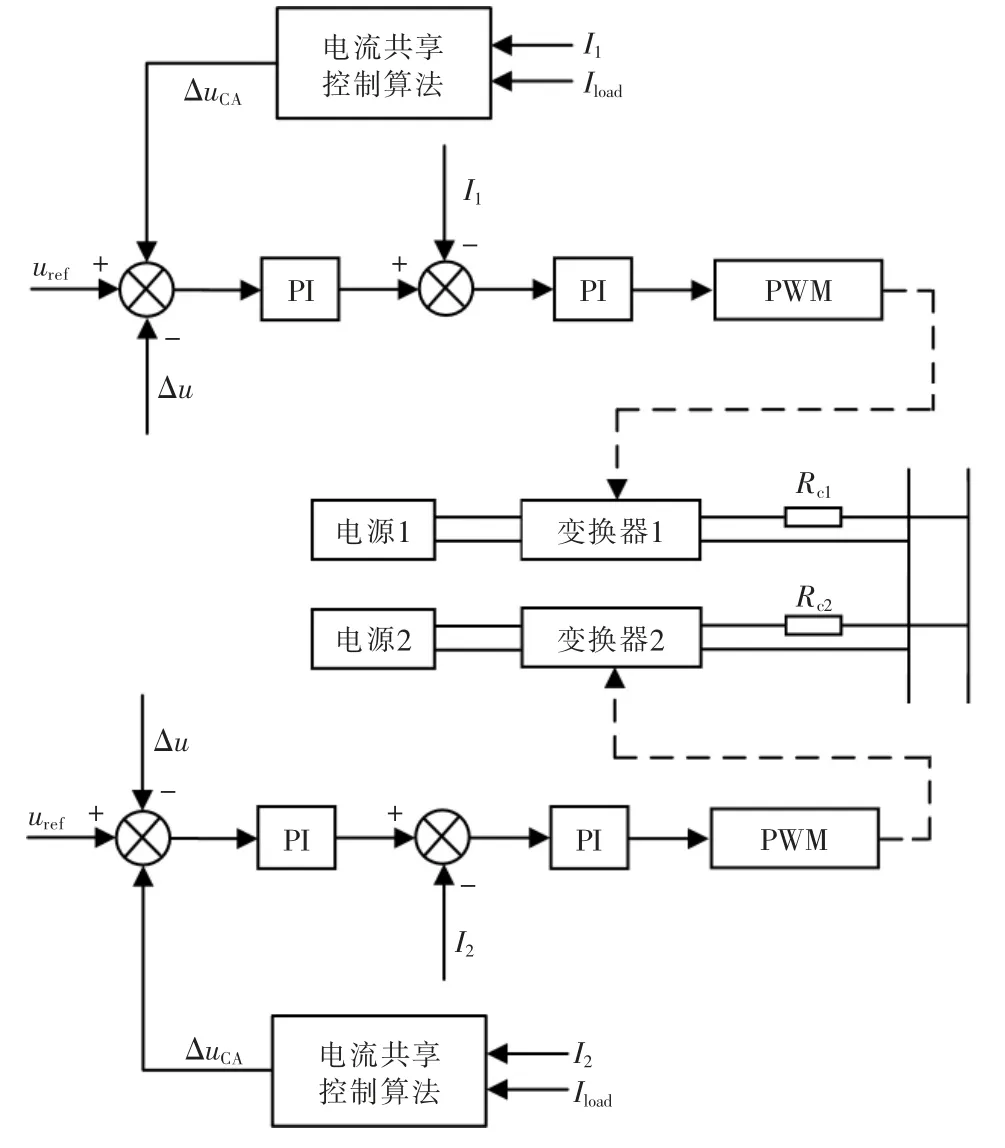
圖5 系統總控制框圖Fig.5 System total control block diagram
3 實驗仿真驗證
為了驗證所提控制算法的有效性,圖6所示在Matlab/Simulink 中搭建了光伏直流微電網并聯儲能系統模型,線路阻抗值采用被動檢測法估計得到[20]。仿真采用的參數如下:光伏陣列工作在MPPT 模式下,固定輸出電流40 A;直流母線額定電壓為400 V;2個儲能變換器采用相同下垂系數Rd=0.2,線路阻抗Rc1=0.2 Ω,線路阻抗Rc2=0.3 Ω;考慮到實際運行條件下相同變換器也會存在參數誤差,設置變換器的參數不同,模擬實際使用時存在的情況,變換器輸出電容C1=470 μF,C2=520 μF;變換器輸入電感L1=0.5 mH,L2=0.6 mH;負載Rload1=50 Ω,負載Rload2=100 Ω,負載Rload3=150 Ω。
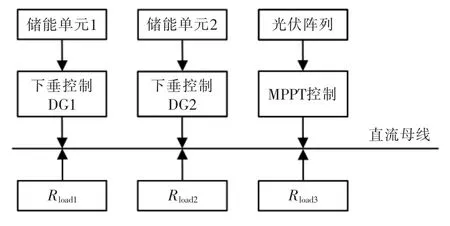
圖6 直流微電網并聯儲能系統仿真模型Fig.6 Simulation model of parallel energy storage system in DC microgrid
3.1 阻抗誤差消除算法驗證
為了驗證2.1 節所提控制算法的有效性,此實驗將加入電壓補償改進控制算法的實驗仿真和采用傳統下垂控制方法的實驗仿真進行了對比。實驗中直流微電網設定為獨立運行狀態,負載在2 s 和4 s時發生波動,電流波形如圖7和圖8所示。
圖7(a)為采用傳統下垂控制方法的電流波形,在2 s 和4 s 時負荷發生波動,負荷功率由22.4 kW變為25.6 kW。傳統下垂控制中,電流分配如下:開始時兩DG 輸出電流分別4.89 A 和3.06 A; 第一次負荷波動后輸出電流分別為9.4 A 和6.2 A;第二次負荷波動后輸出電流分別為14.3 A 和9.5 A,當負荷功率增大時,電流分配誤差也會加大,進一步加劇環流,影響系統穩定。圖7(b)為改進后的電流分配波形,可見電流誤差顯著減小。
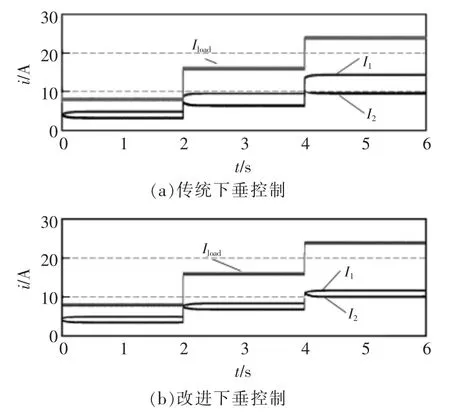
圖7 兩種控制方法電流波形仿真結果Fig.7 Two control methods current waveform simulation results
同時,如圖8(a)所示,傳統情況下母線電壓在負載波動時分別跌落為395 V 和390 V,補償量加入后,電壓能夠始終保持在400 V,保證了電壓質量。
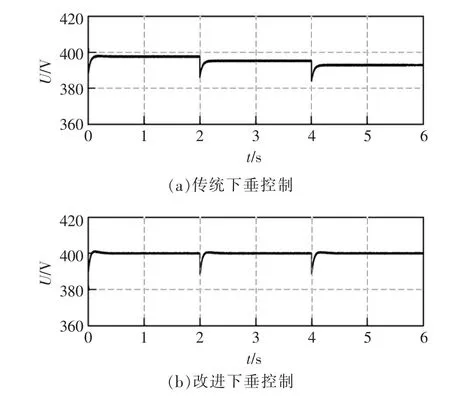
圖8 兩種控制方法電壓波形仿真結果Fig.8 Two control methods voltage waveform simulation results
3.2 參數偏差補償控制算法驗證
上述阻抗誤差控制算法考慮了線路阻抗的影響,仿真結果也表明,新的控制策略能抑制循環電流,電壓降落問題也得到了解決。但圖8(b)中,電流分配偏差沒有能夠完全消除,這是由于未考慮變換器參數偏差對控制造成的影響。為了驗證2.2 節中參數偏差補償方法的有效性,設定了2 個變換器參數誤差,圖9為加入電流算法后的電流波形。

圖9 加入誤差補償的改進控制仿真結果Fig.9 Improved control simulation results with error compensation
由于本地通信網絡下,變換器輸出電流與負載電流信息實時傳遞,使得系統不斷調整ΔuCA的值,修正電壓最終達到了理想電壓設定值。仿真波形顯示,在負荷頻繁波動時,阻抗和變換器參數對系統造成的影響完全消除,輸出電流在每次波動后0.2 s左右就能實現精確分配。
3.3 實驗驗證
為了驗證直流微電網并聯儲能系統改進下垂控制有效性,建立了儲能系統半實物仿真平臺。包括了2 組蓄電池來充當儲能單元,dSPACE,2 臺升壓變換器,以及負載等元件。實驗中變換器參數、線路阻抗參數、負載參數與仿真保持不變。實驗時在25 s 切換負載,模擬負載波動情況,圖10為實驗波形。
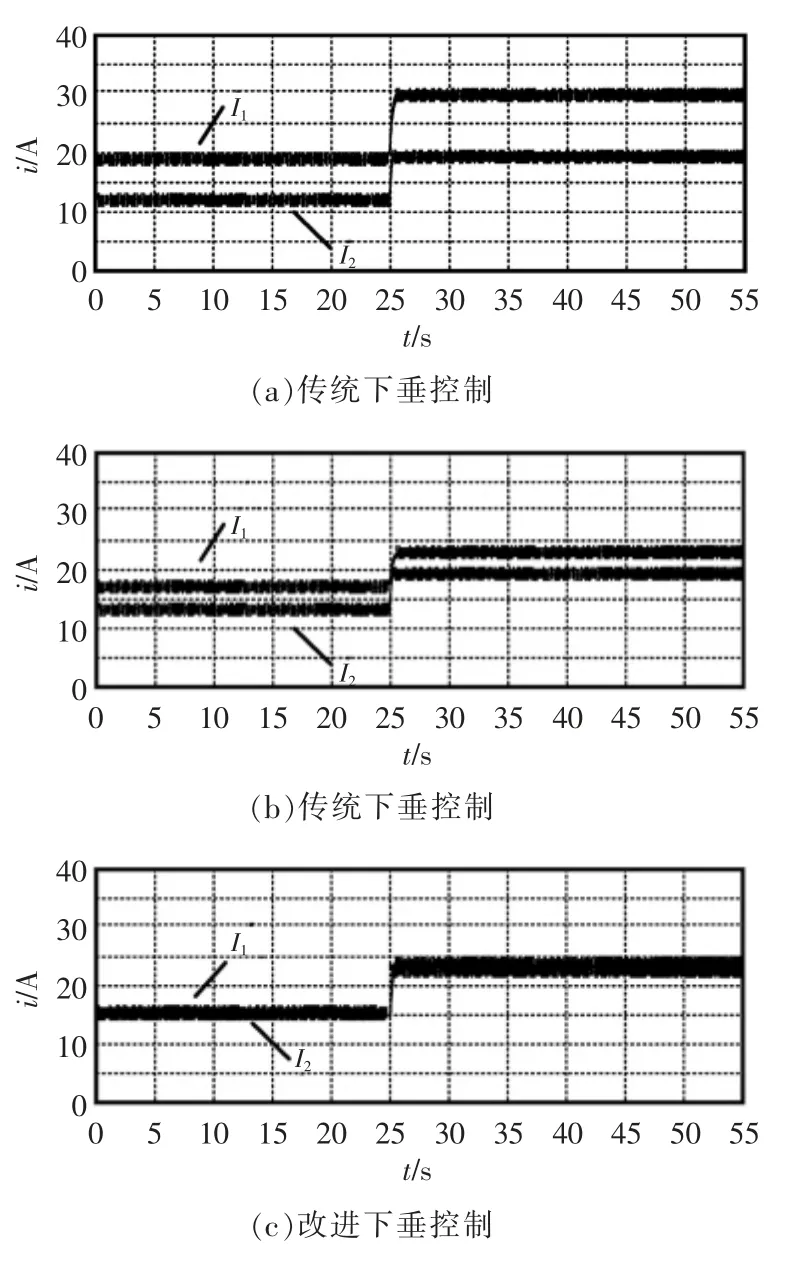
圖10 實驗波形Fig.10 Experimental waveform
從圖10(a)可以看出,傳統控制下,電流分配存在差異,并且隨著負載的波動,變換器間產生的電流誤差會加大,對系統的穩定運行造成影響,容易造成變換器的過載。圖10(b)為考慮阻抗補償的改進控制電流波形,負載波動時循環電流顯著減小,但還沒有完全達到要求。圖10(c)為加入參數誤差補償的電流波形,可以看出利用本文提出的控制策略,達到了系統功率分配要求,證明了方法的有效性。
4 結語
針對直流微電網中并聯儲能系統采用傳統電壓-電流下垂控制方式時,線路阻抗和變換器參數誤差造成的循環電流和母線電壓波動問題。本文提出了一種用于改善并聯變換器負載電流共享的控制方法。消除阻抗影響的算法基于公共耦合點的變換器電流和負載電壓信息,修改了每個變換器的電壓設定點,且無需在并聯儲能單元之間建立通信鏈接;參數偏差消除算法通過PSC 循環控制回路,利用每個變換器的電流與總負載電流的均流百分比與設定值比較,最終確定了電壓設定值,確保了精確的負載電流共享和母線電壓穩定。仿真和實驗結果驗證了所提出的改進控制算法的有效性。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40
