基于DSP的多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)設(shè)計(jì)
2022-07-26 13:55:30張佳
自動(dòng)化與儀表 2022年7期
張 佳
(西安航空學(xué)院 電子工程學(xué)院,西安 710077)
飛機(jī)起落架前輪轉(zhuǎn)彎系統(tǒng)是飛機(jī)進(jìn)行地面操縱的關(guān)鍵部件,飛機(jī)地面轉(zhuǎn)彎的方法通常有:前(后)輪偏轉(zhuǎn)、不對(duì)稱剎車、不對(duì)稱推力(多發(fā)飛機(jī))及拖車或人工牽引[1]。在典型前三點(diǎn)式飛機(jī)上,通常使用前輪偏轉(zhuǎn)實(shí)現(xiàn)飛機(jī)地面滑行時(shí)轉(zhuǎn)彎。前輪轉(zhuǎn)彎系統(tǒng)的功能是根據(jù)操縱要求令飛機(jī)起落架前輪發(fā)生角度偏移,從而實(shí)現(xiàn)對(duì)飛機(jī)地面滑行方向的控制。常見的前輪轉(zhuǎn)彎系統(tǒng)結(jié)構(gòu)分為機(jī)械式和液壓式兩類。機(jī)械傳動(dòng)式前輪轉(zhuǎn)彎系統(tǒng)由方向舵腳蹬控制。液壓傳動(dòng)式前輪轉(zhuǎn)彎系統(tǒng)由操縱裝置、傳動(dòng)裝置、反饋裝置和安全限動(dòng)裝置等環(huán)節(jié)構(gòu)成,其中,操縱裝置包含轉(zhuǎn)彎手輪和方向舵腳蹬;反饋裝置功能是檢測(cè)前輪偏轉(zhuǎn)的角度。目前主流中大型飛機(jī)的前輪轉(zhuǎn)彎系統(tǒng)末端傳動(dòng)方式大部分為液壓傳動(dòng)方式。然而,液壓傳動(dòng)式前輪轉(zhuǎn)彎系統(tǒng)存在許多值得研究改進(jìn)的地方,比如,液壓管路長(zhǎng)、重量大增加了飛機(jī)的負(fù)荷,而且管路接頭存在漏油、滲油風(fēng)險(xiǎn)等。隨著飛機(jī)電傳操縱系統(tǒng)的發(fā)展,目前已經(jīng)出現(xiàn)了多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)[2],多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)基于電機(jī)傳動(dòng)方式實(shí)現(xiàn)飛機(jī)前輪的角度偏轉(zhuǎn)[3]。
本文針對(duì)多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)如何實(shí)現(xiàn)可靠穩(wěn)定的轉(zhuǎn)彎為研究?jī)?nèi)容,圍繞設(shè)計(jì)有效的閉環(huán)前輪轉(zhuǎn)彎系統(tǒng)為目標(biāo),討論通過工程手段控制前輪轉(zhuǎn)彎角度,從而為最終完成多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)的原理樣機(jī),為多電飛機(jī)的進(jìn)一步工程化提供參考。
1 系統(tǒng)總體概述
多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)通過對(duì)電機(jī)的控制實(shí)現(xiàn)飛機(jī)前輪的轉(zhuǎn)彎,本質(zhì)上多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)是以角度為控制對(duì)象的伺服系統(tǒng)。自20世紀(jì)80年代以來,無刷直流電機(jī)(brushless DC motor,BLDC)依靠其優(yōu)越的性能得到了迅速的發(fā)展并且廣泛應(yīng)用于諸多工程領(lǐng)域,目前,無刷直流電機(jī)已經(jīng)成為運(yùn)動(dòng)控制領(lǐng)域應(yīng)用最為廣泛的電機(jī)類型。同時(shí),伴隨著半導(dǎo)體技術(shù)的發(fā)展,各類針對(duì)運(yùn)動(dòng)控制領(lǐng)域的控制器推陳出新,功能越來越豐富、運(yùn)算速度越來越快。特別是美國德州儀器公司(TI)推出的C2000系列DSP 經(jīng)過近25年的發(fā)展已經(jīng)成為運(yùn)動(dòng)控制領(lǐng)域的經(jīng)典控制核心元器件。C2000 系列DSP 具有PWM 輸出模塊、eQEP 采集模塊、eCAP 采集模塊、eCAN 通信模塊和SCI 通信模塊等豐富的外設(shè)功能模塊,涵蓋了運(yùn)動(dòng)控制領(lǐng)域所需的大部分功能。
前輪轉(zhuǎn)彎控制系統(tǒng)的控制對(duì)象為飛機(jī)前起落架,其中轉(zhuǎn)彎電機(jī)、減速器、離合器、角度傳感器等用于實(shí)現(xiàn)前輪轉(zhuǎn)彎的機(jī)電環(huán)節(jié),安裝于飛機(jī)前起落架本體上。控制系統(tǒng)獨(dú)立于前輪起落架,通過供電電纜和通訊電纜經(jīng)航空連接器與前起落架相連。多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)總體交聯(lián)結(jié)構(gòu)如圖1所示。
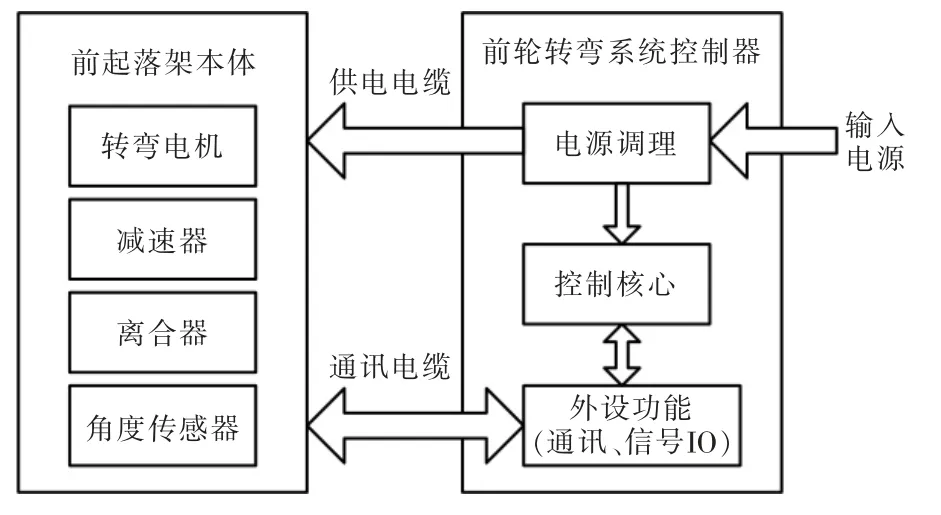
圖1 多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)總體交聯(lián)結(jié)構(gòu)圖Fig.1 Cross-linking diagram of more electric aircraft nose wheel turning system
多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)中,以控制系統(tǒng)作為核心,電機(jī)及其附屬機(jī)械結(jié)構(gòu)作為執(zhí)行機(jī)構(gòu),角度傳感器作為反饋元器件,以上三部分為主體構(gòu)成閉環(huán)控制的多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)。從本質(zhì)上講,閉環(huán)控制的多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)是一個(gè)以偏轉(zhuǎn)角度為被控對(duì)象的伺服系統(tǒng)。多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)的結(jié)構(gòu)示意圖如圖2所示。
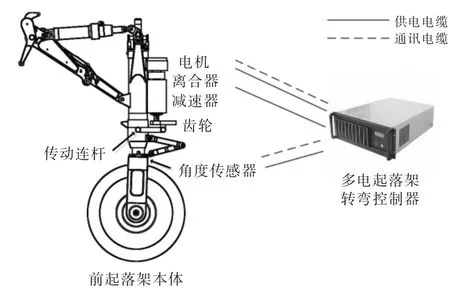
圖2 多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)的結(jié)構(gòu)示意圖Fig.2 Structural diagram of nose wheel turning system of more electric aircraft
2 硬件設(shè)計(jì)
多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)的硬件設(shè)計(jì)主要依據(jù)為安裝于起落架本體上的各個(gè)被控對(duì)象,控制系統(tǒng)通過正向輸出控制指令到電機(jī),通過反饋回路采集角度傳感器的數(shù)據(jù)構(gòu)成一個(gè)閉環(huán)系統(tǒng),并通過控制系統(tǒng)內(nèi)部運(yùn)行閉環(huán)算法實(shí)現(xiàn)以角度為控制對(duì)象的伺服控制。從控制系統(tǒng)原理來看,在開展控制系統(tǒng)硬件設(shè)計(jì)前首先應(yīng)該明確安裝于起落架本體上的被控對(duì)象的接口。在多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)中,與控制系統(tǒng)存在交聯(lián)的被控對(duì)象主要有轉(zhuǎn)彎電機(jī)、離合器和角度傳感器。各被控對(duì)象的接口分析如下。
1)轉(zhuǎn)彎電機(jī)
轉(zhuǎn)彎電機(jī)選用Maxon 公司的EC90 flat 無刷直流電機(jī),該電機(jī)自帶霍爾傳感器和冷卻風(fēng)扇,具有電子換向功能。該系列電機(jī)調(diào)節(jié)性能出色、轉(zhuǎn)矩特性良好、功率高、轉(zhuǎn)速范圍大和使用壽命長(zhǎng)久,可實(shí)現(xiàn)轉(zhuǎn)彎角度的精確定位。EC90 flat 系列盤式電機(jī)是專門進(jìn)行薄型設(shè)計(jì)的無刷DC 電機(jī),特別適用于空間較為狹小的場(chǎng)合(額定功率600 W,厚度僅為52.4 mm),并且?guī)в谢魻杺鞲衅骱蛢?nèi)置電子裝置。電機(jī)具體參數(shù)如下:額定功率600 W;額定電壓48 V;額定電流283 mA;額定轉(zhuǎn)速1960 r/min;額定轉(zhuǎn)矩1490 N·m;重量988 g。EC90 flat 無刷直流電機(jī)外觀如圖3所示。

圖3 EC90 flat 無刷直流電機(jī)外觀示意圖Fig.3 EC90 flat brushless DC motor
EC90 flat 無刷直流電機(jī)采用ESCON 70/10 作為配套驅(qū)動(dòng)器。ESCON 70/10 驅(qū)動(dòng)器是具有緊湊結(jié)構(gòu)的大功率四象限PWM 伺服驅(qū)動(dòng)器,可適配有效控制最大功率700 W 的BLDC。ESCON 70/10 驅(qū)動(dòng)器具備完善的電機(jī)驅(qū)動(dòng)功能以及模擬和數(shù)字輸入、輸出端,通信接口為USB 2.0/USB 3.0(全速)。
2)離合器
前輪轉(zhuǎn)彎系統(tǒng)選用VMTT 公司的VM3 系列單摩擦片電磁離合器,該離合器利用電磁原理,通過直流電源控制動(dòng)力傳動(dòng)的吸合與分離,通電吸合斷電分離(被吸合端為法蘭)。吸合/分離均可在高速旋轉(zhuǎn)中進(jìn)行,方便在任何適合實(shí)施或切斷前輪轉(zhuǎn)彎作動(dòng)功能。此外,該離合器適用于干式無油環(huán)境,符合前輪轉(zhuǎn)彎的實(shí)際需求。VM3 系列單摩擦片電磁離合器具體參數(shù)如下:傳遞扭矩動(dòng)摩擦5 N·m,靜摩擦5.5 N·m;輸入電壓24 VDC;工作電流0.46 A;功率11 W;最高轉(zhuǎn)速3000 r/min;最大直徑67.5 mm;最大高度33 mm;重量0.6 kg。
VM3 系列單摩擦片電磁離合器利用電磁鐵原理,通過24 V 直流電源來控制動(dòng)力傳動(dòng)的分離和吸合,通電狀態(tài)時(shí)吸合,斷電狀態(tài)時(shí)分離。對(duì)于VM3系列離合器而言,其控制信號(hào)為24 V/開信號(hào)。VM3系列單摩擦片電磁離合器外觀如圖4所示。

圖4 VM3 系列單摩擦片電磁離合器外觀示意圖Fig.4 VM3 series single friction plate electromagnetic clutch
3)角度傳感器
前輪轉(zhuǎn)彎系統(tǒng)角度傳感器選用BM29-R 系列多圈絕對(duì)值角度傳感器。BM29-R 系列角度傳感器,采用變壓器原理進(jìn)行無觸點(diǎn)測(cè)角,角度分辨率為14位。
BM29-R 系列角度傳感器為多圈絕對(duì)角度輸出。電子記憶記圈方式,適用于斷電后旋轉(zhuǎn)不超過半圈的場(chǎng)所,其具體參數(shù)如下:位數(shù)14 bit;單圈角度分辨率16384(1.3′);精確度±2.6′;允許最大轉(zhuǎn)速6750 r/min;測(cè)角范圍最大±32767 圈;數(shù)據(jù)刷新速率>10 kHz;輸出接口串行口RS-485;通訊協(xié)議Fable協(xié)議;附加功能有清零功能和改變方向功能;傳感器供電電壓9~30 V;功耗<2 W;工作溫度-10~+70 ℃;防護(hù)等級(jí)IP65。BM29-R 系列角度傳感器外觀如圖5所示。

圖5 BM29-R 系列角度傳感器外觀示意圖Fig.5 BM29-R series angle sensor
根據(jù)被控對(duì)象的接口及功能技術(shù)特點(diǎn)分析可知,前輪轉(zhuǎn)彎控制系統(tǒng)需要提供以下接口:為轉(zhuǎn)彎電機(jī)提供48 V 供電接口和USB 通訊接口,為電磁離合器提供24 V/開控制接口,為角度傳感器提供9~30 V 供電接口和RS-485 通訊接口。此外,為實(shí)現(xiàn)上位機(jī)與控制系統(tǒng)的數(shù)據(jù)交換,控制系統(tǒng)還要為上位機(jī)提供RS-422 通訊接口。
多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)以TI 公司的C2000系列TMS320F28335 型DSP 作為控制核心,其提供了強(qiáng)大的運(yùn)算控制性能和豐富的外設(shè),完全能夠滿足前輪轉(zhuǎn)彎控制系統(tǒng)所要求的各接口和控制功能。根據(jù)被控對(duì)象及外設(shè)功能需求,前輪轉(zhuǎn)彎系統(tǒng)硬件設(shè)計(jì)分為以下幾個(gè)部分。
2.1 電源設(shè)計(jì)
在前輪轉(zhuǎn)彎控制系統(tǒng)工作現(xiàn)場(chǎng),外部電源可以提供48 V 直流供電。而控制系統(tǒng)需要向各被控對(duì)象提供直流48 V、24 V 及9~30 V 供電接口。其中直流48 V 供電接口可由外部電源提供,控制系統(tǒng)僅負(fù)責(zé)其通斷。直流24 V 及9~30 V 可以統(tǒng)一為24 V 供電,通過DC-DC 電源模塊將外部電源提供的48 V調(diào)理為24 V 電源為被控對(duì)象供電。
2.2 USB 通訊接口設(shè)計(jì)
為實(shí)現(xiàn)與電機(jī)驅(qū)動(dòng)器的通訊和控制,需要設(shè)計(jì)USB 通訊接口。DSP 提供了SCI 異步通訊接口,其無法直接與外部USB 設(shè)備相連,因此需要USB 協(xié)議接口芯片作為橋梁,實(shí)現(xiàn)DSP 與外部USB 設(shè)備之間的通訊。
為此選用USB 接口芯片CH375 實(shí)現(xiàn)USBHOST 功能,CH375 芯片擁有寬度為8 位的數(shù)據(jù)總線和輸入、輸出、使能控制線以及中斷響應(yīng)引腳[4],能夠和DSP 的系統(tǒng)總線對(duì)接通訊。
2.3 24 V/開控制接口設(shè)計(jì)
為實(shí)現(xiàn)對(duì)電磁離合器的控制,需要設(shè)計(jì)24 V/開控制接口。DSP 提供豐富的GPIO 接口,能夠提供高/低電平信號(hào)輸出,但GPIO 接口的驅(qū)動(dòng)能力有限,只能提供3.3 V 電壓和最大4 mA 的驅(qū)動(dòng)電流,無法用DSP 直接驅(qū)動(dòng)電磁繼電器,因此需要設(shè)計(jì)功率放大電路將GPIO 引腳的高/低電平信號(hào)調(diào)理為24 V/開控制信號(hào)。
考慮到電源系統(tǒng)中已經(jīng)設(shè)計(jì)了直流24 V 電源體制,可以將直流24 V 電壓作為電磁離合器的控制電壓,DSP 的GPIO 接口實(shí)現(xiàn)對(duì)直流24 V 輸出的通斷功能。為此,經(jīng)過兩級(jí)電路完成上述功能,第一級(jí)GPIO 接口輸出的3.3 V 高/低電平經(jīng)達(dá)林頓管放大后調(diào)理為5 V 高/低電平信號(hào);第二級(jí),直流24 V電壓接至繼電器的公共觸點(diǎn),5 V 高/低電平信號(hào)控制繼電器的常開觸點(diǎn)通斷實(shí)現(xiàn)24 V/開控制信號(hào)的輸出。
2.4 RS-485 通訊接口設(shè)計(jì)
RS-485 通訊接口總線由DSP 的SCI-B 模塊引出,通過收發(fā)模塊TD301M485 實(shí)現(xiàn)與上位機(jī)的通信。TD301M485 模塊用于將DSP 的SCI 模塊的邏輯電平與RS-485 協(xié)議的差分電平進(jìn)行轉(zhuǎn)換,并且提供信號(hào)隔離功能。TD301M485 具有自動(dòng)切換收發(fā)功能,減少了運(yùn)動(dòng)控制板設(shè)計(jì)的復(fù)雜性。
2.5 RS-422 通訊接口設(shè)計(jì)
RS-422 通訊接口總線由DSP 的SCI-C 模塊引出,通過收發(fā)器MAX3490,實(shí)現(xiàn)與上位機(jī)的通信。MAX3490是MAXIM 公司的全雙工的RS-422 收發(fā)器,其使用單個(gè)3.3 V 電源供電,兼容+5 V 邏輯電平,最大邊沿時(shí)間僅8 ns,無錯(cuò)誤數(shù)據(jù)傳輸?shù)霓D(zhuǎn)換速率限制,低電流關(guān)機(jī)模式下電流僅2 nA,支持-7 V~+12 V 共模輸入電壓范圍,總線上最多允許32 個(gè)收發(fā)器。該通訊芯片主要用于驅(qū)動(dòng)器過載保護(hù)的限流和熱關(guān)機(jī)、工業(yè)控制局域網(wǎng)、集成服務(wù)數(shù)字網(wǎng)絡(luò)、分組交換技術(shù)、電信、用于電磁干擾敏感應(yīng)用的收發(fā)器。多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)的硬件結(jié)構(gòu)如圖6所示。
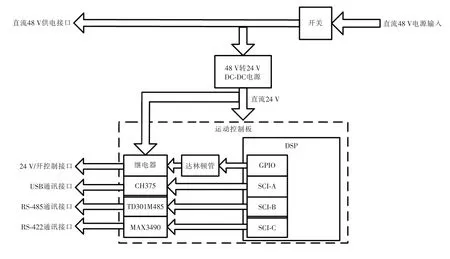
圖6 多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)的硬件結(jié)構(gòu)圖Fig.6 Hardware structure diagram of nose wheel turning control system of more electric aircraft
3 軟件設(shè)計(jì)
多電飛機(jī)前輪轉(zhuǎn)彎控制系統(tǒng)的控制核心是TMS320F28335 型DSP 處理器,DSP 的嵌入式軟件開發(fā)基于CCS 開發(fā)環(huán)境。控制系統(tǒng)軟件實(shí)現(xiàn)的主要功能有:轉(zhuǎn)彎角度閉環(huán)伺服控制、離合器通斷控制、上位機(jī)請(qǐng)求響應(yīng)。各軟件功能模塊的設(shè)計(jì)思路介紹如下。
3.1 轉(zhuǎn)彎角度閉環(huán)伺服控制
轉(zhuǎn)彎角度閉環(huán)伺服控制是控制系統(tǒng)的核心功能,該功能模塊的主要作用是使前輪轉(zhuǎn)彎角度能夠跟隨上位機(jī)下發(fā)的指令,并且前輪轉(zhuǎn)彎角度在閉環(huán)伺服控制算法的作用下能夠抵御外部的擾動(dòng),比如地面轉(zhuǎn)彎靜態(tài)摩擦力矩、側(cè)向加速度動(dòng)態(tài)轉(zhuǎn)彎操縱力矩等。轉(zhuǎn)彎角度閉環(huán)伺服控制算法采用PID 算法,由于對(duì)電機(jī)進(jìn)行角度控制以及角度傳感器反饋均為數(shù)字量,需要對(duì)PID 控制規(guī)律進(jìn)行離散化處理,采用PID 算法中的增量式PID 算法。通過啟用DSP 中的定時(shí)器Timer0,能夠?qū)崿F(xiàn)周期性循環(huán)的PID 運(yùn)算控制、通過SCI-A 模塊向電機(jī)下發(fā)控制指令以及通過SCI-B 模塊采集角度傳感器的數(shù)據(jù)。
在前輪轉(zhuǎn)彎系統(tǒng)中,為增大轉(zhuǎn)彎力矩在電機(jī)輸出軸端增加了減速器,其減速比為36∶1。此外角度傳感器通過齒輪與前輪轉(zhuǎn)彎?rùn)C(jī)構(gòu)連接,減速比為6∶1。為保持統(tǒng)一,將角度傳感器的反饋值和電機(jī)的控制值換算為以前輪轉(zhuǎn)彎的真實(shí)角度為基準(zhǔn),即角度傳感器的反饋值除以6 作為前輪的真實(shí)轉(zhuǎn)彎角度,對(duì)電機(jī)下發(fā)的期望轉(zhuǎn)彎角度乘以36 作為電機(jī)的角度控制值。伺服控制算法中,以角度傳感器的反饋量除以6 所得前輪的真實(shí)轉(zhuǎn)彎角度作為被控對(duì)象。轉(zhuǎn)彎角度閉環(huán)伺服控制算法原理圖如圖7所示。
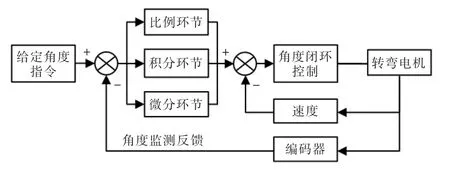
圖7 轉(zhuǎn)彎角度閉環(huán)伺服控制原理圖Fig.7 Schematic diagram of closed loop servo control of turning angle
增量型PID 控制算法中由于DSP 輸出增量,所以誤動(dòng)作影響小[5],必要時(shí)可用邏輯判斷的方法去掉。增量式算法僅受當(dāng)前偏差值的影響,與起落架之前的轉(zhuǎn)彎角度無關(guān),所以增量控制適用于手動(dòng)/自動(dòng)無擾動(dòng)切換。此外增量算法不產(chǎn)生積分失控,所以容易獲得較好的調(diào)節(jié)品質(zhì)。
3.2 離合器通斷控制
離合器主要用于接通或斷開電機(jī)與前輪之間的力矩傳遞。離合器的通斷受24 V/開信號(hào)控制,24 V/開信號(hào)經(jīng)由達(dá)林頓管最終由DSP 的GPIO 引腳控制。TMS320F28335 共包含89 個(gè)GPIO 引腳,選用DSP 中的GPIO35 引腳作為24 V/開信號(hào)控制引腳。對(duì)GPIO35 引腳的初始化分為兩步,首先GPBMUX1中的GPIO35 設(shè)置為0,即GPIO35 引腳的復(fù)用功能選擇為GPIO 功能;第二步將GPBDIR 中的GPIO35設(shè)置為1,即GPIO35 引腳的方向設(shè)置為輸出。完成初始化后,只需要對(duì)GPBDAT 的GPIO35 位設(shè)置1或者0 即可完成24 V/開信號(hào)的切換。
3.3 上位機(jī)請(qǐng)求響應(yīng)
上位機(jī)與控制系統(tǒng)直接通過RS-422 通訊。在嵌入式軟件中,配置DSP 的SCI-C 模塊為RS-422 接口。SCI-C 模塊各通訊參數(shù)設(shè)置:波特率115200 bps,停止位1 位,無校驗(yàn)位,數(shù)據(jù)位8 位。同時(shí)使用SCI-C模塊的FIFO 功能接收上位機(jī)下發(fā)的數(shù)據(jù),啟用FIFO 接收中斷,中斷接收級(jí)別為8。每當(dāng)控制系統(tǒng)接收到上位機(jī)發(fā)來的8 字節(jié)請(qǐng)求指令時(shí),DSP 響應(yīng)一次接收中斷,并對(duì)數(shù)據(jù)進(jìn)行判斷處理。數(shù)據(jù)處理依據(jù)為事先約定的通訊協(xié)議,其格式如表1所示。

表1 通訊協(xié)議格式Tab.1 Format of communication protocol
通訊協(xié)議前2 個(gè)字節(jié)為數(shù)據(jù)幀頭。第3 個(gè)字節(jié)為寄存器地址,用于區(qū)分指令所代表的請(qǐng)求類型。第4~7 個(gè)字節(jié)為寫入寄存器的數(shù)據(jù)。最后一個(gè)字節(jié)為L(zhǎng)RC 校驗(yàn)和。
4 結(jié)語
通過對(duì)多電飛機(jī)前輪轉(zhuǎn)彎系統(tǒng)中被控對(duì)象的分析,并根據(jù)被控對(duì)象的特點(diǎn)和接口設(shè)計(jì)了前輪轉(zhuǎn)彎控制系統(tǒng)。本文所設(shè)計(jì)的前輪轉(zhuǎn)彎控制系統(tǒng)以DSP 為核心,能夠有效的實(shí)現(xiàn)以轉(zhuǎn)彎角度為控制對(duì)象的伺服系統(tǒng)。經(jīng)測(cè)試在該前輪轉(zhuǎn)彎控制系統(tǒng)的控制作用下,多電飛機(jī)前輪轉(zhuǎn)彎角度能夠達(dá)到±30°,能夠滿足技術(shù)指標(biāo)要求。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
