隨機變化耦合復雜網絡同步與信道衰落估計
2022-07-29 03:35:56劉小斌張金南董宏麗
東北石油大學學報 2022年3期
關鍵詞:信號
劉小斌, 張金南, 侯 男, 董宏麗
( 1. 上海電子信息職業技術學院 中德工程學院,上海 201411; 2. 東北石油大學 人工智能能源研究院,黑龍江 大慶 163318; 3. 東北石油大學 黑龍江省網絡化與智能控制重點實驗室,黑龍江 大慶 163318; 4. 東北石油大學 三亞海洋油氣研究院,海南 三亞 572025 )
0 引言
隨控制理論和信息技術的發展,有關復雜動態系統(如傳感器網絡、多智能體、復雜網絡、神經網絡)的研究增多[1-5]。復雜網絡由一系列相互作用的動態單元組成,包括自然界中的食物網、蜂窩,以及人類生活中的生物網絡、交通網絡、社交網絡等[6-8]。復雜網絡的特征是存在網絡節點耦合,其動力學行為研究涵蓋控制、穩定性、同步與狀態估計等問題[9-12]。復雜網絡同步可理解為,在初始條件不同的情況下,各個網絡節點或子系統通過相互作用使輸出趨于接近。復雜網絡同步現象常見且重要,如掛在同一個橫梁上的兩個鐘擺通過橫梁而相互作用,經過一段時間后自然地出現同步擺動;5G無線通信網絡通過各基站間交互信令,實現時鐘同步(發射與接收數據的時間基準相同),保證基站有序傳輸數據,避免產生強烈干擾而影響正常運轉。
狀態估計作為復雜網絡的另一種動態行為分析,受到人們廣泛關注[13-15]。在網絡實時監控、故障診斷和工業生產等需要掌握網絡行為特征的工程應用中,準確且全面地獲取網絡節點的狀態,是保證設計實現的關鍵。由于復雜網絡規模大、節點耦合強或環境條件惡劣等因素,難以直接獲取全部網絡節點的狀態信息。基于可獲得的網絡節點的傳感器測量信號,在給定性能指標的約束下設計狀態估計器,得到復雜網絡狀態盡可能準確的近似值。如EDWARDS C等提出分布式觀測器結構,估計由正時變耦合強度連接的大型半線性網絡狀態,并應用于互聯柔性連桿機器人系統網絡,估計電機軸與連桿角位置和速度[14]。
復雜網絡的外耦合描述不同節點之間的連接強度或拓撲結構,內耦合反映一個節點內部各狀態分量的連接情況[16],復雜網絡的外耦合或內耦合是固定的。當發生鏈路故障、重建連接、通道阻塞、網絡攻擊或其他突發現象時,復雜網絡的外耦合發生改變;當受到工作條件或環境擾動等影響時,復雜網絡的內耦合發生改變,可能對復雜網絡的性能產生作用[17]。在復雜網絡的性能分析過程中,考慮耦合變化可以有效保證研究的現實性及有效性。有關復雜網絡的不固定外耦合和內耦合的研究包括切換拓撲[18-19]、時變拓撲[20-21]、馬爾可夫切換拓撲[22]、不確定內耦合[23]、時變內耦合[24]及隨機內耦合[25]等,其中馬爾可夫鏈通過轉移概率反映模態切換,是典型的隨機切換模型,用來描述復雜網絡的隨機變化耦合強度現象。
隨網絡通信的產生,在信號傳輸網絡為生產提供便利的同時,通信信道帶寬有限等物理條件易引發多種網絡誘導現象[26-28]。特別是當信號通過無線通信信道傳輸時,受地理位置或障礙物影響而引起反射和衍射,導致接收到的信號包含來自不同路徑的信號分量。在接收端,各路徑信號分量的到達時間和相位不盡相同,與原信號相比,它們迭加后導致信號振幅變化和延遲,降低信號的質量和精度,稱為多路徑衰落[29-30]。相較于使用理想測量信號,使用信道衰落信號設計估計器更加反映真實情況。人們在信道衰落研究方面取得進展[31-33],如SHEN Y等引入Rice衰落模型,描述傳感器測量信號經由衰落信道傳輸至濾波器時,隨機發生數據缺失及延遲,為克服測量信號的時滯項給數學推導帶來影響,設計遞歸濾波器。
在復雜網絡系統的實際使用過程中,發生元件老化和工作條件差異等現象,使系統的模型參數具有時變特性[34-35]。引入時變參數可以較準確地描述系統的動態演變,提高研究的可靠性和應用有效性。復雜網絡系統也受到環境的隨機突變、部件故障或子系統互聯等擾動,直接影響系統的狀態和動態性能。為避免建模理想化,在狀態中考慮乘性噪聲和加性噪聲以反映存在的擾動[36-37]。實際系統一般還具有非線性特性,在復雜網絡系統分析與綜合研究過程中,不可缺少對非線性的處理[38-39]。因此,非線性時變復雜網絡的同步及信道衰落估計,是符合工程需要和亟待解決的基礎研究課題。
首先,介紹一類貼合實際的具有乘性噪聲和加性噪聲的時變離散復雜網絡系統模型,復雜網絡系統的拓撲連接和內耦合連接強度隨機變化,隨機性由馬爾可夫鏈刻畫,模態按照轉移概率隨機切換。其次,分析系統的同步性能和設計復雜網絡H∞同步方法。再其次,基于更為一般化的復雜網絡模型,考慮實際測量傳輸時產生數據隨機缺失和延遲等,采用信道衰落的數學模型反映信息不完全現象,設計基于信道衰落的H∞狀態估計器;借助于計算遞歸矩陣不等式確定H∞估計器增益。最后,通過兩個仿真實例說明設計方法是可行的。
1 問題描述
在有限域[0,N0]上,考慮節點個數為Λ的復雜網絡系統。節點i(i=1,2,…,Λ)動態:
(1)
式中:xi(k)和zi(k)分別為節點i的狀態向量和輸出向量;?j(k)符合標準正態分布,即?j(k)~N(0,1);若γjq(k)≠0,則Γq(k)diag{γ1q(k),γ2q(k),…,γrxq(k)}≥0為連接第j(j=1,2,…,rx)個狀態變量的內耦合矩陣;v(k)表示干擾;A0(k)、B0j(k)(j=1,2,…,a)、Gi(k)和E0(k)為已知且維數恰當的參數矩陣;非線性向量函數h(·)(h(0)=0)遵循約束條件:
[h(x)-h(y)-H1(x-y)]T[h(x)-h(y)-H2(x-y)]≤0,?x,y∈Rrx,
(2)
式中:H1和H2為給定矩陣。馬爾可夫鏈q(k)(k≥0)在一個有限狀態空間{1,2,…,U}中取值。給定轉移概率矩陣Δ[πmn]U×U中的各個元素:
Prob{q(k+1)=n|q(k)=m}=πmn,?m,n∈{1,2,…,U},

注1受環境干擾或元件老化等影響,復雜網絡內部動態可能出現隨機特性。采用馬爾可夫鏈刻畫復雜網絡的隨機變化耦合[19,22],并考慮乘性噪聲開展分析。

(3)
成立,那么離散時變復雜網絡系統為全局同步。
2 同步分析

(4)
定理1在引理1情形下,如果存在常數c>0和矩陣Qm(k)>0,在初始條件
(5)
下,可保證遞歸矩陣不等式
(6)
成立,那么離散時變復雜網絡系統(1)為全局漸近同步,其中,
證明根據式(1),可得xi(k)(i=1,2,…,Λ)的緊湊表達形式:

h(x(k))+(Wm?Γm)x(k)+G(k)v(k)。
(7)
為簡便處理時變復雜網絡(7)的同步問題,選擇函數:
(8)
式中:
(9)
(10)
定義符號xir(k)xi(k)-xr(k)和hir(k)h(xi(k))-h(xr(k))。
由約束條件(2)可得
(11)
借助于引理1并根據式(10)和(11),可得
(12)

考慮式(6),可得
(13)
對式(13)兩邊關于k由0至N0求和,可得
進而可得
根據式(5),式(3)成立。
注2受環境噪聲影響,在存在本質非線性等工程的實際情況下,建立具有時變參數、隨機變化耦合、非線性、乘性噪聲和加性噪聲的復雜網絡系統(1)。在定理1中,給出使時變復雜網絡(1)實現同步的充分條件。計算遞歸矩陣不等式(6)的解集,使復雜網絡各個節點的輸出之差符合H∞性能指標要求,即在任何干擾存在的情況下,不同節點的輸出之差仍低于給定的擾動衰減水平。
3 估計器設計
基于式(1),考慮表達形式更為一般的復雜網絡節點狀態估計:
(14)
在傳感器測量信號經由通信網絡傳輸至接收裝置(估計器)的過程中,發生信道衰落現象,使實際被接收到的信號不再是原測量信號,而是來源于多路徑且有強度差異的各信號分量相迭加。采用數學表達形式描述信道衰落信號:
(15)

注3不充分信息現象一方面來自于傳感器本身的特性(傳感器非線性、量化、飽和、傳感器分辨率引起的不確定性),另一方面來自于測量信號經由網絡傳輸過程中受外部環境和擾動等因素的影響,使原信號發生失真(信道衰落、測量丟失、誤碼、數據包錯序)。在信道衰落信號(15)中,被接收的信號為來自多個不同路徑的子信號的迭加。區間[0,1]上,按照概率密度函數隨機取值的信道系數,反映各個信道中信號幅值的衰減。測量信號時滯描述由不同傳輸路徑的傳輸距離帶來的通信延遲。當ε=0,δis(k)=1且Li(k)=0時,式(15)與理想測量信號相同。
基于信道衰落信號(15),采用時變狀態估計器得到復雜網絡(14)各節點的狀態估計:
(16)
定義OmO(q(k))(O=Γ,ωir,Ki(k))和令和分別描述狀態與輸出的估計誤差。由式(14)和(16)可得:
(17)

為了數學表示簡便,定義變量:
X(k)diag{X1(k),X2(k),…,XΛ(k)}(X=A,C,E),Bj(k)diag{B1j(k),B2j(k),…,BΛj(k)},
根據式(14)和(17),可得xi(k+1)、ei(k+1)和zei(k)的緊湊形式:
(18)
(19)

(20)
設計復雜網絡(14)的時變狀態估計器(16)的增益參數,使增廣估計誤差動態系統(20)滿足H∞性能指標要求:
當k=-ε,-ε+1,…,-2,-1時,η(k)≠0,
(21)
式中:γ為已知的干擾抑制水平;Zζ(ζ=-ε,-ε+1,…,0)為已知的正定矩陣。
分析增廣估計誤差動態系統(20)的有限域H∞性能,給出時變狀態估計器(16)的存在條件。利用遞歸矩陣不等式方法計算估計器(16)的未知增益。
定理2給定干擾抑制水平γ>0及估計器增益參數Kim(k)(i=1,2,…,Λ)。如果存在正定矩陣Rm(k+1)>0,Pv(k)>0(v=1,2,…,ε)及正常數t,在初始條件
(22)
下,滿足不等式:
(23)
那么增廣估計誤差動態系統(20)滿足H∞性能指標要求,其中,
證明定義函數:
V(k,η(k),q(k))V1(k,η(k),q(k))+V2(k,η(k)),
(24)

為簡化表達,令Rm(k)R(k,q(k)=m),計算V(k,η(k),q(k))的差分的數學期望:
E{ΔV1(k,η(k),q(k))}=E{V1(k+1,η(k+1),q(k+1)=n)|η(k),q(k)=m}-V1(k,η(k),m)=
ηT(k)Rm(k)η(k)。
(25)
式中:
(26)
考慮非線性約束條件(2),可得
(27)
則得

根據式(23)和初始條件(22),可得式(21)成立。
討論時變H∞狀態估計器(16)的增益參數Ki(k,q(k))的求解方法。
定理3給定干擾抑制水平γ>0。若存在正定矩陣Rm(k+1)diag{R1m(k+1),R2m(k+1)}>0(R1m(k+1)diag{R11m(k+1),R12m(k+1),…,R1Λm(k+1)},R2m(k+1)diag{R21m(k+1),R22m(k+1),…,R2Λm(k+1)}),Pv(k)>0(v=1,…,ε),矩陣Φm(k)diag{0,Φ2m(k)}(Φ2m(k)diag{Φ21m(k),Φ22m(k),…,Φ2Λm(k)})和正常數t,在初始條件下,滿足遞歸矩陣不等式:
(28)
則增廣估計誤差動態(20)達到H∞性能指標要求(21),其中,
狀態估計器(16)的增益參數為
證明式(23)與不等式等價:
(29)

根據Schur補引理,可得
(30)

時變狀態估計器(16)的設計算法:



步驟4結束。
注4基于定理2的H∞性能分析結果,在定理3中,對時變復雜網絡(14)提出有限域H∞狀態估計器(16)的設計方法。由遞歸矩陣不等式(28)可知,估計器設計方法形式簡單,易于實現。采用定理3的算法,可以在估計誤差達到H∞性能指標要求(21)下,通過計算遞歸矩陣不等式的解,求出估計器(16)的增益參數,可得復雜網絡(14)的節點狀態的近似值。在有限域H∞性能指標(21)的約束下,即使面對強烈噪聲,估計誤差也被限制在給定的干擾衰減水平下。定理3結果包括復雜網絡系統的時變參數、非線性約束條件中的矩陣、描述隨機變化耦合強度切換的馬爾可夫鏈轉移概率、信道系數的均值和均方差。
4 仿真實例
例1考慮有限域[0,30],選擇復雜網絡(Λ=4)的參數:
給出非線性函數

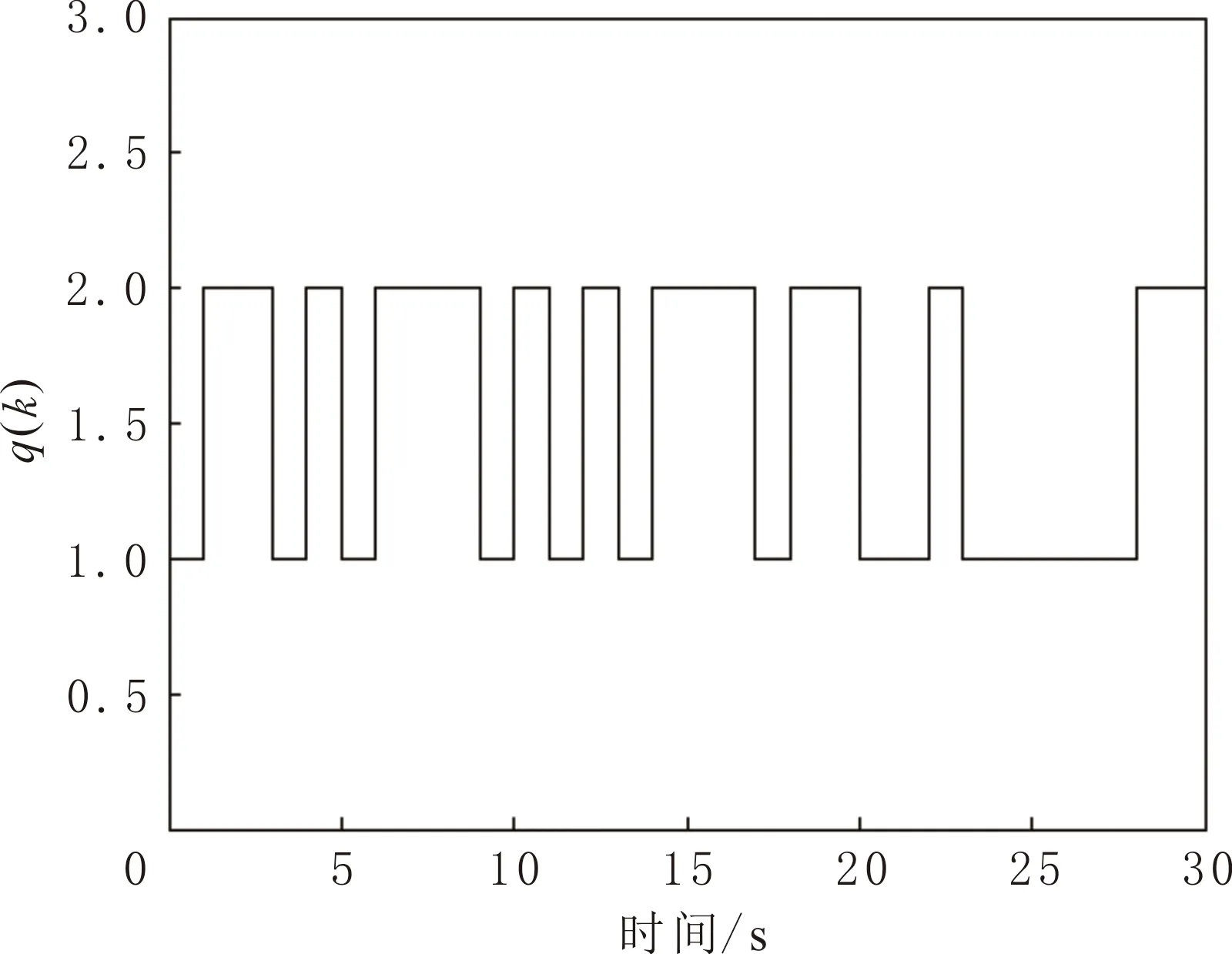
圖1 仿真實例1模態切換Fig.1 Mode switching of simulation example 1
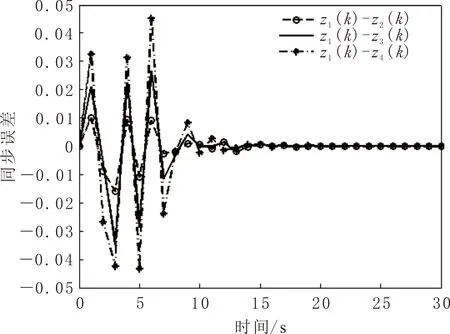
圖2 仿真實例1復雜網絡同步誤差Fig.2 The synchronization error of complex network in simulation example 1
圖1為馬爾可夫鏈q(k)在轉移概率矩陣Δ下,隨時間在2個模態q(k)=1和q(k)=2之間的隨機切換情況。圖2為節點1的輸出z1(k)分別與其余3個節點的輸出z2(k)、z3(k)、z4(k)之間的同步誤差曲線。由圖2可知,在第0~13 s之間,節點1和節點2的最大同步誤差是0.010,節點1和節點3的最大同步誤差是0.026,節點1和節點4的最大同步誤差是0.045;從第14 s開始,節點1與其余3個節點之間的輸出同步誤差開始趨于0。
例2在有限域[0,30]上,選擇復雜網絡(Λ=4)的參數:
其他參數和非線性函數的選擇見例1。
關于信道衰落信號(15),給出ε=2,選擇信道系數的概率密度函數:
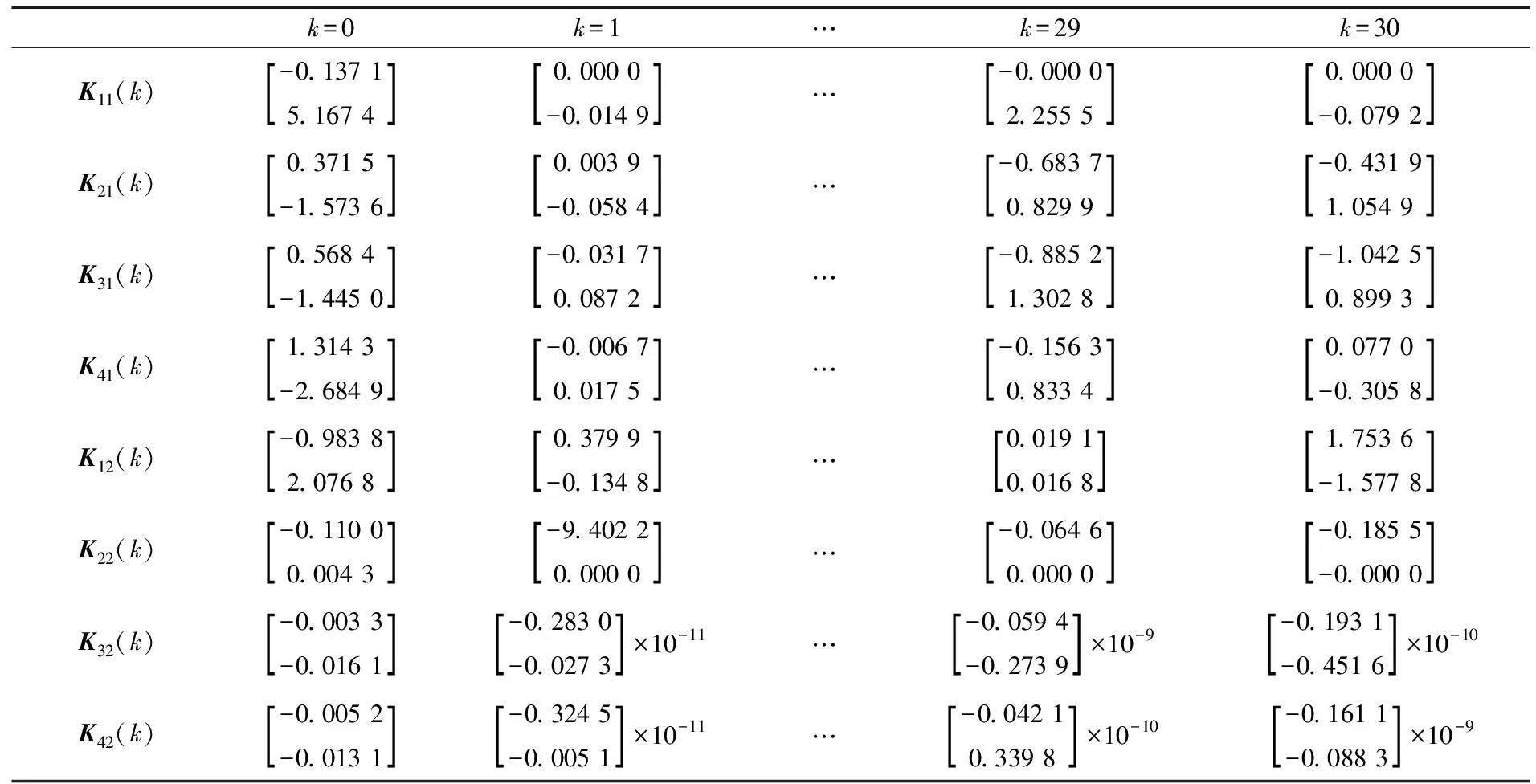
表1 仿真實例2的時變狀態估計器增益參數
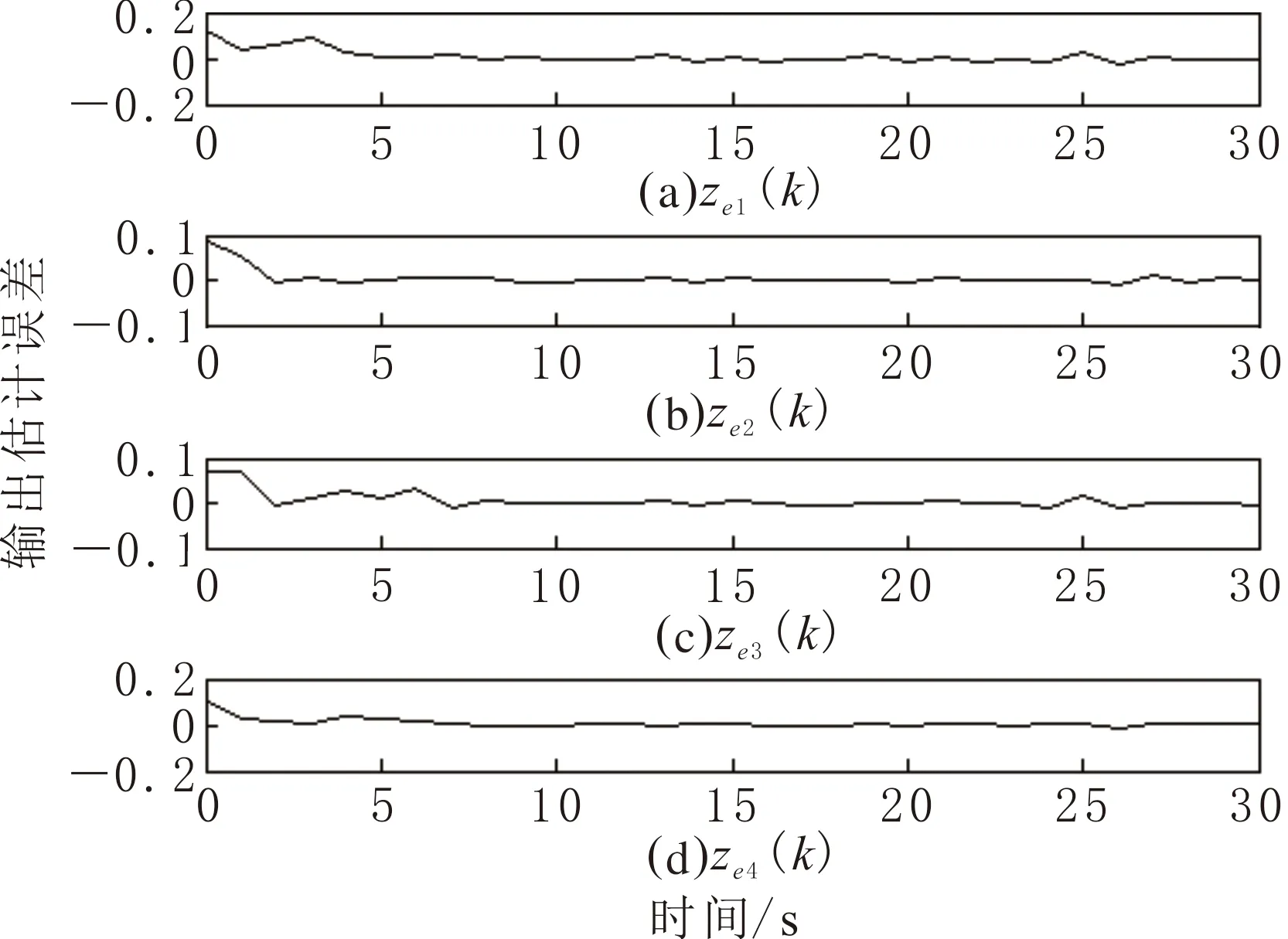
圖3 仿真實例2輸出估計誤差Fig.3 Output estimation error of simulation example 2
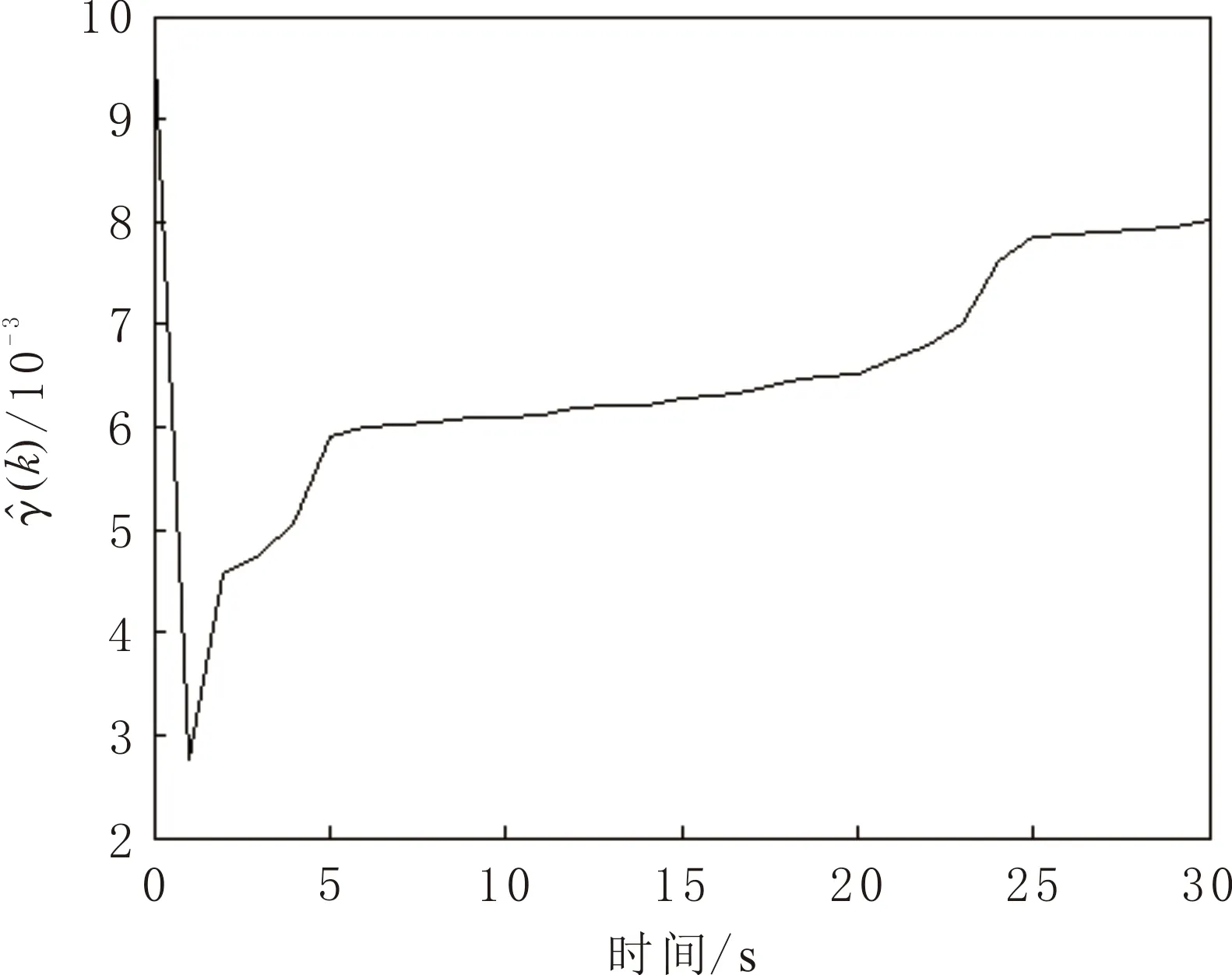
圖4 仿真實例2估計性能Fig.4 The estimation performance of simulation example 2
5 結論
(1)對于考慮時變參數、隨機變化耦合、非線性、乘性噪聲和加性噪聲的復雜網絡系統,設計H∞同步方法與基于信道衰落的H∞狀態估計器。
(2)分別基于復雜網絡的有限域同步與估計性能分析,以遞歸矩陣不等式表示使同步誤差與估計誤差具有H∞性能的充分條件。
(3)仿真實例證明設計方法具有有效性,復雜網絡達到H∞同步,并且設計的狀態估計器使得估計誤差系統滿足H∞性能要求。在后續研究中,將基于部分網絡節點的測量,討論具有網絡誘導現象的復雜網絡非脆弱性狀態估計。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06