基于機載LiDAR的建筑物輪廓線提取
2022-08-01 06:58:14吳智平
北京測繪 2022年5期
吳智平
[拓遠(福建)勘測規劃有限公司 福建 福州 350002]
0 引言
機載激光雷達(light detection and ranging,LiDAR)經過幾十年的發展,已由單一測距發展到眾多領域,其中利用LiDAR點云實現建筑物建模是研究熱點之一[1-3]。建筑物輪廓線是建筑物建模的基礎數據,針對建筑物輪廓線的提取有眾多學者展開了研究,提出的方法主要有Alpha Shapes算法、snake算法、凸包算法等[4-5]。由于點云分布不規則、屋頂邊緣存在缺失等,提取到的輪廓線表現為不規則的折線,無法反映真實屋頂邊緣,需要對輪廓線做進一步精簡處理,如沈蔚對Alpha Shapes算法得到的初始輪廓線強制正交處理[6],Ma通過高斯—馬爾可夫模型進行加權調整,將輪廓線分為平行或垂直的兩組[7]。
目前,建筑物屋頂愈發復雜,其邊緣已不再僅表現為垂直或平行兩種形態,針對建筑物輪廓線的精確提取需進一步展開研究,本文以原始點云數據為基礎,探究建筑物輪廓線提取的整體流程,主要步驟分為:建筑物腳點識別、建筑物輪廓線提取。其中,建筑物腳點識別采用漸進三角網濾波及基于隨機森林的點云分類,建筑物輪廓線提取采用基于方向約束的隨機抽樣一致算法(random sample consensus,RANSAC)。
1 建筑物腳點識別
1.1 漸進三角網濾波算法
從原始點云數據中提取建筑物輪廓線,首先需要識別出建筑物腳點,即從點云數據中提取出建筑物點云,為避免地面點對后續分類的影響,本文首先采用三角網漸進加密濾波算法剔除地面點。該濾波算法是公認的較為優異的濾波算法,通過地面種子點粗糙表達地面模型,借助反復距離與反復角判斷其余點的歸屬[8]。其原理如圖1所示。
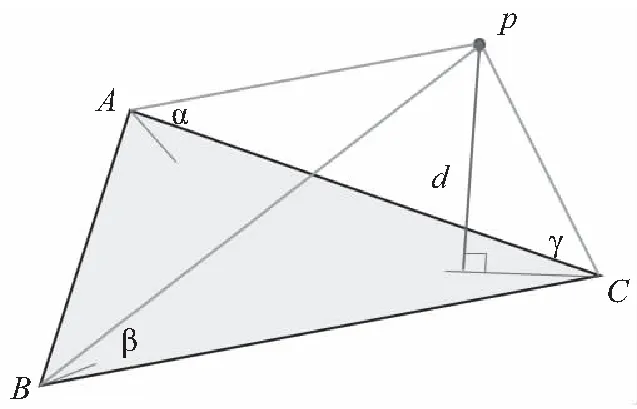
圖1 TIN模型判斷示意圖
圖1中,α、β、γ為反復角,d為反復距離,若其均小于設定閾值,則認為點P為由A、B、C點確定的地面模型中一地面點,將判斷得到地面點加入地面模型重新構網,通過以上迭代操作,使得地面模型逐步精化,逼近真實地面。
1.2 基于隨機森林的點云分類
地物點中進一步提取建筑物點,需要借助分類算法。隨機森林為集成算法,通過將多棵決策樹集成投票,得到輸入數據的類別[9]。該分類器被廣泛使用,在文獻[10]中,發現該分類器的分類效果要好于SWM分類器,故本文借助隨機森林實現面片的分類。
點云特征的有效提取是點云高精度分類的前提,本文選取了22個分類特征,包括5種類型:基于高程的特征、基于記錄信息的特征、基于特征值的特征、基于投影面積的特征及其他特征,具體如表1所示。

表1 分類特征匯總表
為減少篇幅,僅選取其中4個分類特征詳細介紹。
平均高程Hmean是面片對象中所有點云的平均高程,其計算公式如下:
(1)
其中,N為面片對象中點云總數;Hi為第i個點的點云高程值。
多回波比例BMecho代表面片對象中多回波的點云數量占點云總數量的比重,公式如下:
(2)
其中,NMecho表示某一面片中多回波腳點的數量。
線度λl代表面片對象點云構成的協方差矩陣的特征值參數,其求解過程可參見1.2節,該參數的計算公式如下:
(3)
擬合誤差的平均值Rmean代表面片對象中各點到擬合平面的殘差平均值,公式如下:
(4)
2 基于方向約束的建筑物輪廓線提取
本文采用Alpha Shapes算法實現建筑物初始輪廓線的提取。Alpha Shapes算法將半徑為Alpha圓滾動的痕跡視作點集的輪廓點。沈蔚將Alpha設置為平均點云半徑的2倍左右,取得了較好的效果。圖2為Alpha Shapes算法示意圖,用半徑為Alpha的圓對點集進行滾動得到外圍輪廓點,依次相連得到該點集的輪廓線,如圖中黃色折線。

圖2 Alpha Shapes算法示意圖
初始輪廓線僅為建筑物粗略邊界的表達,為不規則的折線,與真實的屋頂邊界線存在較大的差別,需要進一步規則化處理。鑒于現實中建筑物大多較為規則,其邊緣為幾組不同方向的折線,可通過尋找穩健方向作為約束條件提取輪廓線,本文選取長度最大輪廓線方向作為穩健方向。其余輪廓線與穩健方向存在一定關系,即部分輪廓線與穩健方向平行或垂直,基于這種關系采用方向約束的RANSAC算法提取此部分輪廓線,具體步驟如下:
(1)選取最長輪廓線,取穩健方向水平向量,記作Al,并求得其垂直向量,記作Bl;
(2)依次選取L={Al,Bl}作為某一輪廓線的直線檢測方向向量,并遍歷初始輪廓點,取其中某一點(x0,y0)作為直線上某點,此時這一直線記作l。下式為l的點向式方程:
(5)
(3)計算輪廓點到直線l的距離,若小于閾值,則認為該點為直線內點,統計該直線的內點數量,記錄該條直線及其內點;
(4)遍歷初始輪廓點,選取下一點作為直線一點,重新求解檢測直線方程,重復步驟(3),直至全部輪廓點均得到遍歷;
(5)比較每次檢測出的內點數量,記內點數量最大值為nummax,若nummax大于閾值,則認為檢測到某一輪廓線,該輪廓線即為內點數量最多的檢測直線,將該直線對應的內點標記為flag;
(6)刪除標記為flag的內點,重復步驟(1)~步驟(5),直至檢測不到滿足內點數量的直線;
通過以上過程提取出與穩健方向垂直或平行的輪廓線,對于與穩健方向無特定關系的輪廓線,采用無約束的RANSAC輪廓線檢測方法,即不對檢測直線的方向加以約束。

(a)初始輪廓線
3 實驗結果與分析
為驗證本文建筑物輪廓線提取流程的可行性,選取Vaihingen城區機載LiDAR數據集進行實驗,Vaihingen城區數據是由國際攝影測量與遙感學會(International Society for Photogrammetry and Remote Sensing,ISPRS)第二工作組提供的建筑物提取及建模研究標準數據集,在該數據集中,建筑物較為密集,建筑物結構復雜多樣。
首先,利用漸進三角網濾波實現地面點與非地面點的過濾,如圖4(a)所示,灰色為地面點,紅色為非地面點。借助22個分類特征訓練隨機森林分類器,進一步將非地面點分為建筑物、樹木以及車輛、籬笆等其他地物類型,圖4(b)中,藍色表示建筑物、綠色表示樹木、紅色表示其他地物類型。圖4(c) 、圖4(d)為局部區域立體顯示效果圖,可以看到濾波及分類處理良好,其中建筑物分類效果較好,可滿足建筑物輪廓線提取需求。圖4(e)為疊加點云的正射影像圖,藍色折線為提取出的輪廓線,輪廓線與建筑物屋頂邊緣貼合程度較好,屋頂點云基本位于輪廓線內側或附近,說明提取出的輪廓線平面位置較為精確。
為對提取出的輪廓線精度定量評價,每個建筑物選取6條輪廓線,分別統計這些特征線相距正射影像屋頂邊緣的距離,并用像素代表距離值,結果如表2所示,輪廓線最大偏差在3個像素以下,可以較好地反映真實建筑物外部邊緣平面位置。

(a)濾波結果圖

表2 建筑物屋頂線輪廓線平面精度 單位:像素
4 結束語
建筑物輪廓線是建筑物建模的基礎數據,本文探究了一套原始點云數據中建筑物輪廓線提取流程,其中提出了基于方向約束的建筑物輪廓線規則化方法,實現了建筑物輪廓線較高精度的提取。實驗表明,本文算法建筑物輪廓線與實際套合較好,偏差穩定在較低水平,但本文算法的約束方向需要手動選線確定,自動化程度較低,對穩健方向的自動化確定是后續研究的重點。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
