基于表速控制的無人機高度改變的控制律仿真設計
2022-08-01 04:16:30秦樂
測控技術 2022年7期
關鍵詞:飛機
秦 樂
(北京青云航空儀表有限公司 飛控設計部,北京 100086)
自動飛行控制系統是無人機的關鍵飛行系統,包括自動駕駛儀和自動油門[1]。自動飛行控制系統作為無人機的控制中心,負責實時采集飛行狀態和大氣環境參數,結合地面控制信息,解算控制律,使舵機/油門實現對無人機的姿態軌跡、速度等的控制,從而使無人機沿著最優的水平和垂直剖面飛行,完成相應的戰術任務[2]。
自動飛行控制系統有若干種工作模式。根據任務要求,可選擇不同的工作模式,使無人機自動完成預定飛行任務[3]。在自動飛行控制系統研究中,與飛行任務相關的垂直飛行模式設計研究就顯得尤為重要[4]。
在垂直飛行剖面下的爬升/下降,可以通過俯仰角保持、垂直速度保持、航跡傾角保持和高度層改變等多種模態實現。
目前國內一些無人機是通過控制俯仰姿態或垂直速度達到爬升或下降的目的,即通過控制升降舵及油門以保持一定的俯仰角或垂直速度實現飛機高度的改變。其缺點是油耗較大、經濟性較差以及動態過程不夠穩定。張登成等[5]使用縱向控制律中高度差和俯仰角為反饋信號,俯仰角速度作為阻尼信號,升降舵偏角為控制輸出,實現高度層改變,從仿真曲線可以看出達到穩定高度時動態過程不好,有震蕩。王元超等[6]在縱向控制律中采用俯仰角PID(Proportional-Intergral-Derivative Control)經典控制設計,通過升降舵控制,實現高度層改變,工程實現容易,但通過分析可以看出,該研究中,爬升高度速度較慢,油耗較大。
目前,高度層改變模式在國內外主要應用于中大型飛機,在小型飛機及無人機中使用較少。在國內外研制的民用/軍用飛機自動飛行控制系統中均具備高度層改變功能,利用自動油門提供推力、升降舵控制速度并在多型飛機中采用了基于能量角概念的飛行控制算法。其中B737、B777、C919等飛機均具備高度層改變模式,A330等空客飛機具備開放爬升(OPEN CLB)、開放下降(OPEN DES)模式用于實現飛行高度層改變功能,引入能量角控制,將總能量中的70%用于加速或減速、30%用于爬升或下降。本文以高度層改變為例,提出了一種基于總能量控制的無人機改變飛行高度層的自動控制方法,開展控制律設計和仿真研究,能降低油耗,提高經濟性,穩定動態過程[7]。
飛機的發動機是增加飛機總能量的設備,而操縱升降舵帶來的是飛機動能和勢能的相互轉化,所以可以利用發動機控制推力,提供飛機的動能和勢能之和(即總能量),利用升降舵控制動能和勢能的轉換,從而實現飛機以一定的速度爬升/下降。
在研究中,高度層改變模態以保持一定的表速的方式,爬升或下降至提前設定的修正氣壓高度。該方式下用升降舵控制表速,自動油門接通自動推力控制[8-11]。在升降舵實現動能和勢能的轉換過程中,引入能量角,創新性地將基于總能量控制的理念應用在本算法中,提高控制精度的同時提高經濟性、降低油耗。
1 高度層改變的控制律設計
能量角表示飛機在當前速度和推力下所能達到的最大的航跡傾角,是一個能夠代表飛機能量變化的物理量。
若不計轉動運動的能量,則運動飛機相對地面的總能量E為
(1)
式中:Ekin為動能;Epot為勢能;m為飛機質量;VK為飛機航跡速度;g為重力加速度常數;H為飛機相對地面的高度。
若除以重量,則能很直觀地得到能量高度HE:
(2)

(3)

(4)
能量角γE為相對飛機重力的能量裕度,等于在某推力下所能達到的最大航跡傾角,在飛機推力恒定時,飛機保持能量角不變就可以實現速度不變。
因此在算法中,由目標表速和現時表速的差值作為主控信號,創新性地引入能量角,基于總能量的概念,依據速度差值和能量角補償,計算出俯仰角偏差值,根據俯仰角保持的算法來計算舵面指令,控制無人機實現以目標表速進行高度層改變的控制功能[12-13]。
對設定的目標表速進行了速度限制,通過對無人機的性能分析,確定無人機的最大速度限制和最小速度限制,保證目標表速限制在安全范圍內,避免由于設置目標表速不合理導致的超速或者失速。
在快速改變目標表速時,增加了速率限幅模塊,避免目標表速瞬時改變太快造成控制指令比較大的跳變,同時對控制指令淡化處理,避免瞬態的發生,提高系統的控制平穩性。
通過對自動油門的仿真,最終確定了不同高度差值時爬升過程中的爬升推力,以及下降過程中最小推力的值。經過計算和仿真分析,調整參數,同時根據當前高度和目標高度的差值,以及當前的垂直速度的值設計算法,判斷相應的邏輯,縱向模態轉為高度保持,從而實現無人機平穩無超調地達到目標高度,自動油門由推力控制轉為速度控制[14-15]。
本控制律算法的創新點為縱向通過速度控制升降舵實現飛機的爬升/下降,而自動油門通過推力控制提供能量,二者協同工作,最終保證飛機垂直剖面的軌跡控制。其中在速度控制中根據目標表速和現實表速的差值計算給定俯仰角時,為了避免爬升時加速,飛機低頭以及下降時減速飛機抬頭等不必要的動作,對俯仰角、目標表速等信號做了安全限制,保證飛機爬升/下降中飛行趨勢不發生改變。
通過控制油門推力及升降舵協同工作,實現飛機從當前高度爬升或下降至目標高度的功能,并保證飛機在爬升或下降過程中實現保持目標表速的航跡最優化。此方法的優點是在爬升或下降過程中,飛機由發動機推力改變引起的能量變換以最大效能轉化為高度的改變,同時最大限度地改變油門,保證了在表速不變情況下以最短時間爬升或下降至指定高度的航跡最優化。在爬升或下降過程中,對俯仰角以及目標表速等信號進行一定的限幅等處理,實現速度保護功能,避免失速超速等危險情況發生,保證飛機的飛行安全性。高度層改變的控制示意圖如圖1所示。
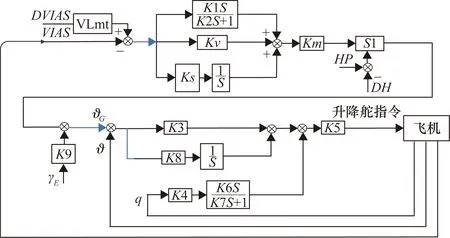
圖1 高度層改變的控制示意簡圖
圖1中K3、K4、K5、K8、Kv、Ks和Km為算法中根據高度、表速進行二維插值、調參的增益系數,根據高度速度來改變其取值,可以提高不同高度、不同速度下算法的控制精度和性能,也可以保證飛機在受到干擾時達到相應的飛行品質,從而提高系統的魯棒性。圖1中的符號說明如表1所示。

表1 符號說明
2 仿真驗證
本算法在某型無人機數學模型上進行了數學仿真驗證。該無人機的垂直剖面軌跡控制主要在無人機爬升/下降過程中使用,下面在巡航構型下,在不同初始高度、速度條件下,列舉3種情況。
以現時高度HP=5000 m,現時表速VIAS=352 km/h,目標表速DVIAS=352 km/h,目標高度DH=7000 m為例進行仿真,高空速度不變、高度爬升的仿真結果如圖2所示。其中NZ為法向過載,CMDPIT為給定法向過載。
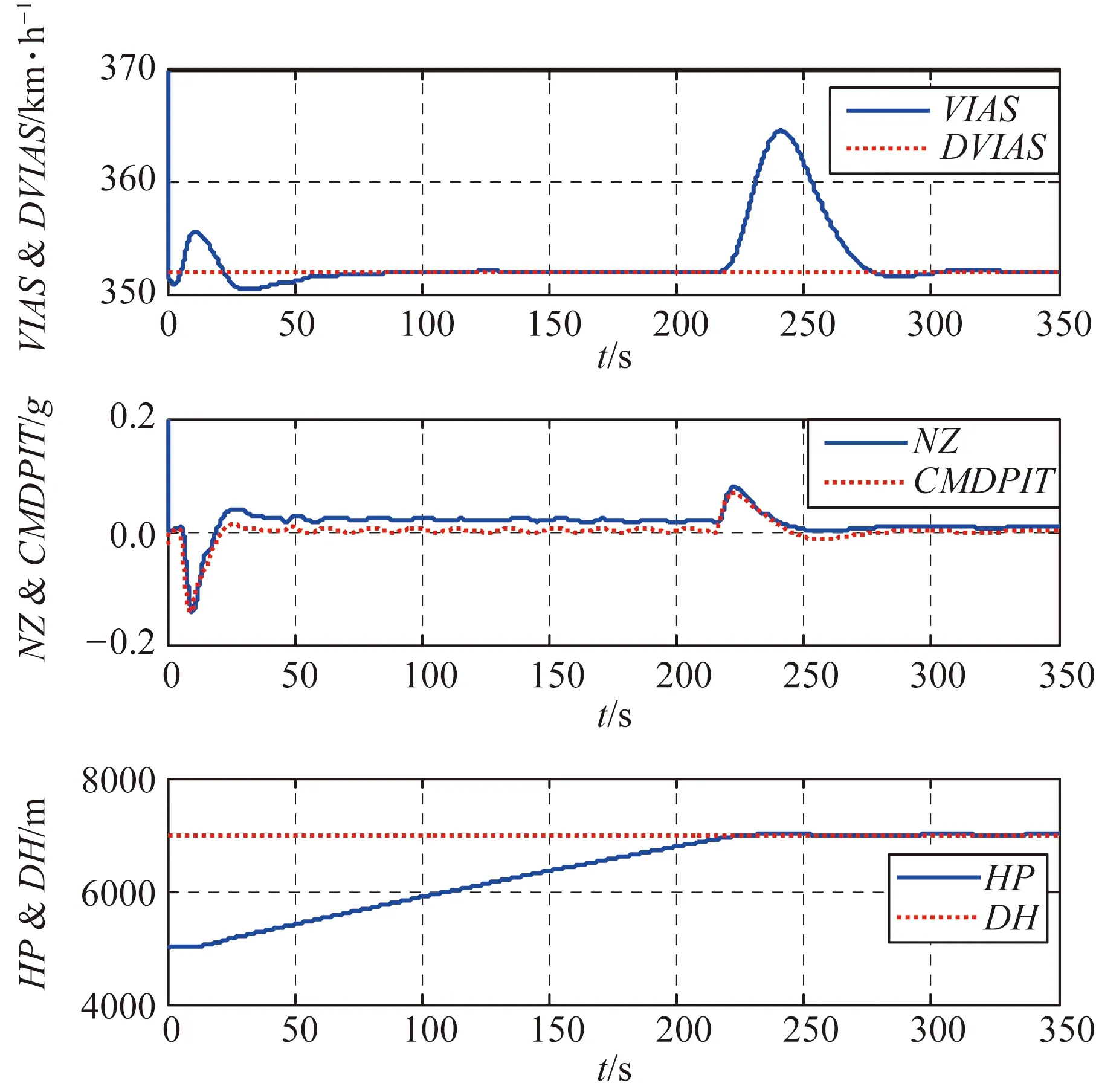
圖2 高空速度不變高度爬升仿真結果
從圖2仿真結果可以看出目標表速和現時表速曲線在爬升和高度保持兩段時間里重合,說明表速控制功能正確,法向過載跟隨給定法向過載曲線符合控制功能,爬升時,自動油門平滑地設置控制推力來完成爬升;自動飛行控制系統通過升降舵控制表速;210 s接通高度保持的控制律,保持目標高度。
以現時高度HP=500 m,現時表速VISA=370 km/h,目標表速DVIAS=370 km/h,目標高度DH=2500 m為例進行仿真,低空速度不變高度爬升的仿真結果如圖3所示。
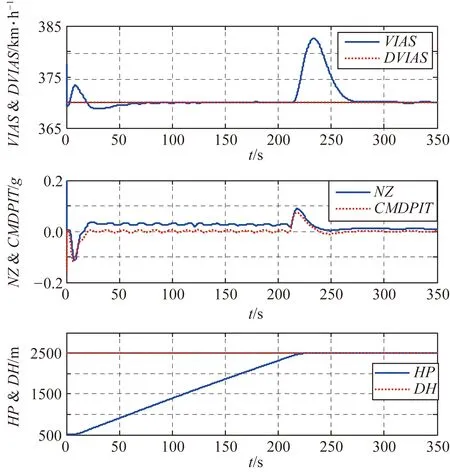
圖3 低空速度不變高度爬升仿真結果
從圖3仿真結果可以看出,目標表速和現時表速曲線在爬升和高度保持兩段時間里重合,說明表速控制功能正確,法向過載跟隨給定法向過載曲線符合控制功能,爬升時,自動油門平滑地設置控制推力來完成爬升;自動飛行控制系統通過升降舵控制表速;220 s接通高度保持的控制律,無超調保持目標高度。自動油門轉為速度控制。
以現時高度HP=5000 m,現時表速VIAS=353 km/h,目標表速DVIAS=353 km/h,目標高度DH=4000 m為例進行加速下降仿真,速度不變高度下降仿真結果如圖4所示。
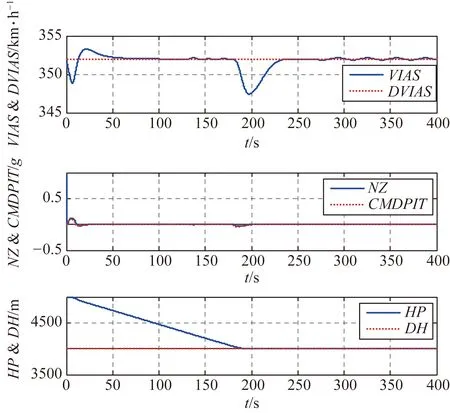
圖4 速度不變高度下降仿真結果
從圖4仿真結果可以看出,目標表速和現時表速曲線在下降和高度保持兩段時間里重合,說明表速控制功能正確,法向過載跟隨給定法向過載曲線符合控制功能,下降時,自動油門平滑地設置控制推力完成了高度的下降,升降舵控制速度,二者協同工作,181 s轉為高度保持,控制功能實現正確。
目前的仿真結果表明,在整個飛行過程中算法能夠實現保持以目標表速爬升或者下降,同時無超調平穩過渡至目標高度[16]。
在不引入能量角的算法中對爬升進行仿真時,容易出現飛機先掉高度增加速度,然后爬升的現象。圖5為未引入能量角時,相對高度(HBC)的仿真結果。
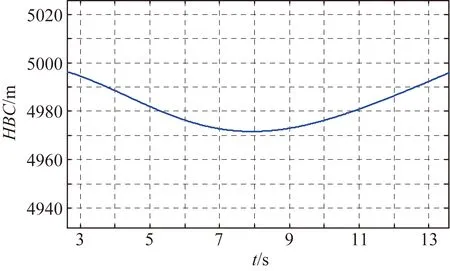
圖5 未引入能量角的仿真結果
以相對高度HBC=5000 m,現時垂直速度VZ=0 m/s,目標垂直速度DVZ=-8 m/s,目標高度DH=7000 m為例進行仿真,相同的自動油門控制的情況下,開展垂直速度和表速控制的對比仿真,垂直速度實現高度爬升的仿真結果如圖6所示。
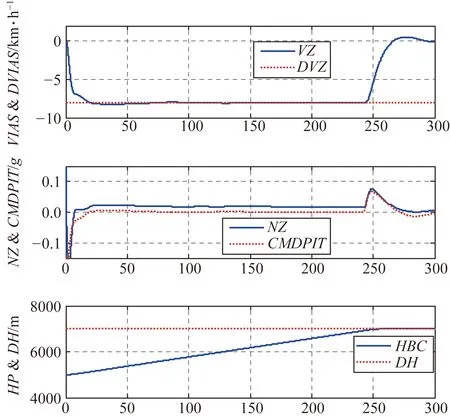
圖6 垂直速度實現高度爬升的仿真結果
從圖6仿真結果可以看出,在同樣的高度和表速的飛行狀態下,相同的自動油門控制的情況,爬升2000 m,垂直速度控制需要242 s才能達到目標高度,而由圖2仿真結果可知210 s就可以達到目標高度,同樣的油門桿位置,垂直速度控制相比表速控制,所用時間更長,油耗更多,表速控制更具有優勢。
3 結束語
通過仿真分析可知,自動飛行控制系統通過引入能量角,基于總能量控制的理念,縱向依據速度差值和能量角補償進行表速控制,并進行速度保護,自動油門推力和速度控制協同控制,使無人機以一定的表速實現縱向高度層改變的飛行[17],保證了因推力變化引起的能量改變,最大限度地轉化為勢能,提高了經濟性和穩定性。
在算法設計中充分考慮了自動飛行控制系統的模式設計并進行了切換機制的研究[18],驗證了高度層改變和高度保持的無超調的控制算法切換邏輯,以及自動油門推力控制和速度保持的切換邏輯,為后續垂直剖面飛行的俯仰模式和自動油門設計滿足控制精度高、控制平穩等要求奠定了基礎。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
