電單車的平衡運動控制研究
2022-08-02 10:10:46蔣鑫源李以卓朱磬鼎沈世斌
電子制作 2022年13期
蔣鑫源,李以卓,朱磬鼎,沈世斌
(南京師范大學(xué) 電氣與自動化工程學(xué)院,江蘇南京,210046)
0 引言
電動自行車作為一種交通工具,有著價格便宜,體積小巧,節(jié)能環(huán)保等特點,因此被廣泛的運用于城市短距離交通[1]。合理的電單車平衡方案不僅能提高使用人在駕駛電單車時的安全性,還能夠為電單車自主巡航提供可能,在人工智能和5G物聯(lián)網(wǎng)引領(lǐng)的時代有廣泛的運用前景。結(jié)合共享單車可以提供電單車自動尋找用戶,自動定點還車,人車跟隨等功能。與此同時,類似于電單車這種前后兩輪控制的輪式機(jī)器人是機(jī)器人研究中的一個重要分支,它環(huán)境適應(yīng)性強(qiáng),能量利用率高,具有很高的實用價值。
國內(nèi)許多學(xué)者開展了平衡電單車的研究和設(shè)計工作。現(xiàn)有的自平衡方案主要分為兩類:(1)以慣量輪為平衡元件,利用角動量守恒原理實現(xiàn)電單車自平衡[2];(2)根據(jù)電單車自身的結(jié)構(gòu)特性,基于PID控制電單車實現(xiàn)平衡[3]。方案基于PID控制實現(xiàn)電單車自平衡。設(shè)計以STC8為主控芯片,主要由車體,電磁傳感器,車體姿態(tài)傳感器,平衡運動控制,能源動力五個部分組成。較之已有的電單車自平衡方案有兩個突出優(yōu)點。一是結(jié)構(gòu)小巧簡單,省去了慣量輪這樣的機(jī)械裝置;二是價格便宜,采用STC8作為主控芯片,ICM20602為車體姿態(tài)傳感器,S3010舵機(jī)實現(xiàn)平衡的同時控制轉(zhuǎn)向,整體平衡方案造價便宜。方案在以上兩個優(yōu)點的基礎(chǔ)上,成功實現(xiàn)了電單車的自平衡與循跡,運行精準(zhǔn),響應(yīng)快速。
1 電單車平衡原理
電單車是一種欠驅(qū)動系統(tǒng),輸入的獨立控制變量個數(shù)少于系統(tǒng)本身的自由度個數(shù),因此有節(jié)約能量,造價低,系統(tǒng)靈活度高的特點[4]。一個靜止的電單車相當(dāng)于一維的倒立擺,其自身是一個不穩(wěn)定系統(tǒng),只要偏離平衡位置,就會產(chǎn)生重力分力使其更加偏離平衡位置,這樣偏差就會越來越大。因此為了使電單車平衡,需要有另一個力來平衡重力分力。
如圖1所示,當(dāng)電單車向左傾倒時,使電單車作向左轉(zhuǎn)的圓周運動,車身需要重力分力提供向心力,當(dāng)所需向心力大于車身的重力分力時,產(chǎn)生的離心力就會使車身作離心運動,使車身向預(yù)定位置回正。
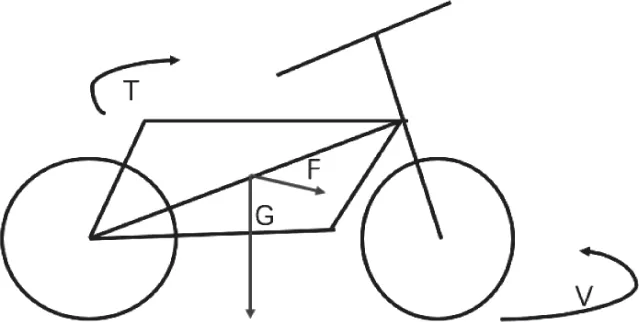
圖1 電單車左轉(zhuǎn)時受力示意圖
G為電單車重力;F為電單車作圓周運動產(chǎn)生的離心力;V為電單車運動方向;T為電單車產(chǎn)生的力矩。
由此可見,當(dāng)電單車偏離平衡位置時,例如倒向左邊,則只要使小車向左轉(zhuǎn)向,即舵機(jī)控制車把向左打方向,就可以利用產(chǎn)生的離心力將電單車?yán)仄胶馕恢谩?/p>
2 自平衡系統(tǒng)總體方案設(shè)計
自平衡控制系統(tǒng)由主控制器,姿態(tài)檢測模塊,直流電機(jī)驅(qū)動及帶編碼器的直流電機(jī),舵機(jī),電磁傳感等模塊組成。其系統(tǒng)總體結(jié)構(gòu)框圖如圖2所示。

圖2 系統(tǒng)總體結(jié)構(gòu)框圖
主控制器模塊選用STC8H8K64作為主控芯片,是控制系統(tǒng)的核心,其中包括復(fù)位電路、時鐘電路、串口通訊電路,并且輸出兩路PWM信號來分別控制舵機(jī)轉(zhuǎn)向以及電機(jī)轉(zhuǎn)動。該模塊的主要功能是接受姿態(tài)傳感器,直流電機(jī)編碼器和電磁傳感器的反饋數(shù)據(jù),對數(shù)據(jù)進(jìn)行處理及運算,最后將控制信號輸出給舵機(jī)和直流電機(jī)驅(qū)動模塊。姿態(tài)檢測模塊選用ICM20602六軸加速度計,通過陀螺儀和加速度計的互補(bǔ)濾波監(jiān)測自身狀態(tài),并將其轉(zhuǎn)換為主控制器模塊可以識別的信號傳送給主控。根據(jù)監(jiān)測的車身實時姿態(tài),采用PID控制算法,控制舵機(jī)轉(zhuǎn)向使電單車維持動態(tài)平衡。直流電機(jī)驅(qū)動模塊負(fù)責(zé)將主控制器輸出的PWM 信號轉(zhuǎn)換為控制信號,驅(qū)動直流電機(jī)的轉(zhuǎn)速。通過旋轉(zhuǎn)編碼器讀取速度傳送回主控芯片,形成速度閉環(huán)。
3 硬件方案設(shè)計
控制系統(tǒng)硬件電路結(jié)構(gòu)主要由主控制器模塊、電源模塊、姿態(tài)檢測模塊、直流電機(jī)及其驅(qū)動模塊、轉(zhuǎn)向和平衡控制模塊、方向引導(dǎo)模塊六個部分組成。
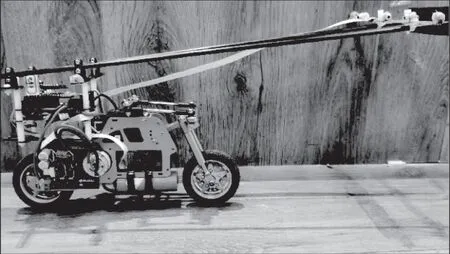
圖3 電單車車身圖
3.1 主控制器模塊
單片機(jī)最小系統(tǒng)采用STC8H8K64為主控芯片,集成復(fù)位電路,時鐘電路和串口通訊電路。方案直接使用逐飛科技提供的STC8H8K64核心板。具有64
個引腳,支持硬件SPI和IIC。
3.2 電源模塊
方案采用7.4V車模鋰電池供電。由于各外設(shè)的電源需要,采用DC-DC的降壓方案。總供給四種不同的電壓:
(1)電機(jī)驅(qū)動由電池電源直接供電。
圖4 逐飛STC8H8K64核心板實物圖
(2)對于單片機(jī)以及實現(xiàn)自平衡和調(diào)試需要的各外設(shè),包括陀螺儀,OLED屏幕,無線串口等的供電。選用TI公司生產(chǎn)的高性能穩(wěn)壓芯片TPS7350和TPS7333進(jìn)行穩(wěn)壓,提供5V和3V3的電壓。電路原理圖如圖5所示。
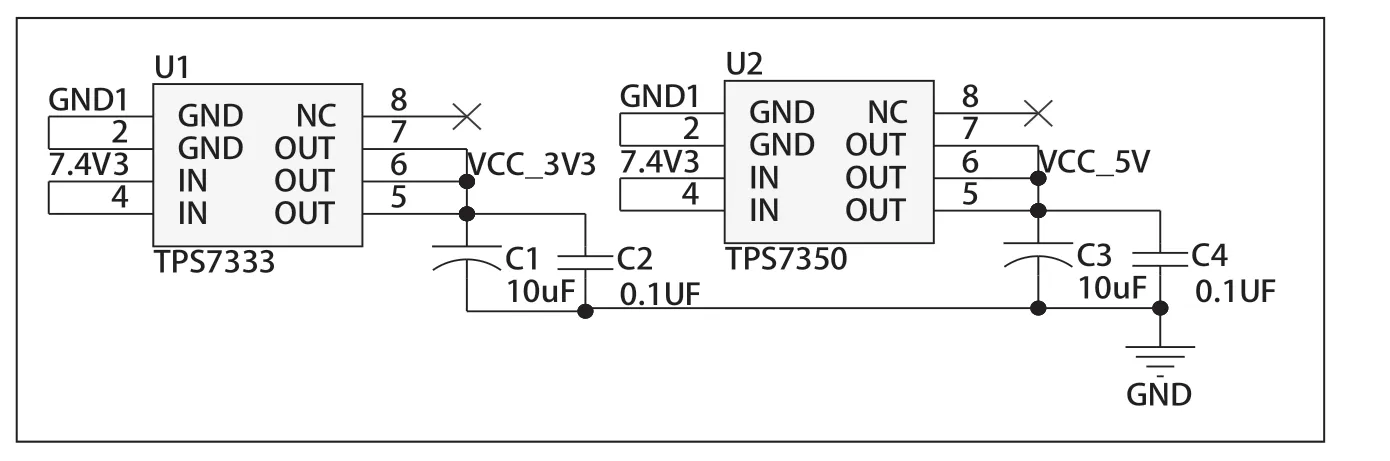
圖5 TPS7350和TPS7333穩(wěn)壓電路原理圖
(3)舵機(jī)的工作電壓要求為6V,同時至少通過300mA的電流,選用降壓開關(guān)電源芯片AS1015作為穩(wěn)壓芯片,電路原理圖如圖6所示。

圖6 舵機(jī)穩(wěn)壓電路原理圖
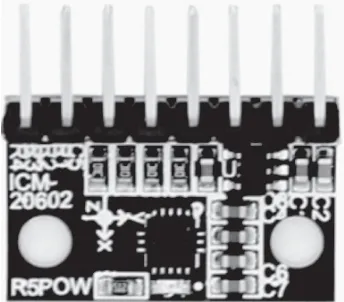
圖7 六軸加速度陀螺儀ICM20602實物圖
3.3 姿態(tài)監(jiān)測模塊
選用TDK推出的數(shù)字陀螺儀ICM20602,它是一個6軸運動跟蹤裝置,集成了一個3軸陀螺儀和一個3軸加速度計。測量精度高,噪聲小。
3.4 直流電機(jī)及其驅(qū)動模塊
直流電機(jī)選用540電機(jī),額定電壓為7.2V。配套使用編碼器讀取速度,形成速度閉環(huán)。
電機(jī)驅(qū)動電路設(shè)計時使用了N溝道MOSFET IR7843和專用柵極驅(qū)動芯片IR2104組成的驅(qū)動電路,原理圖如圖8所示。
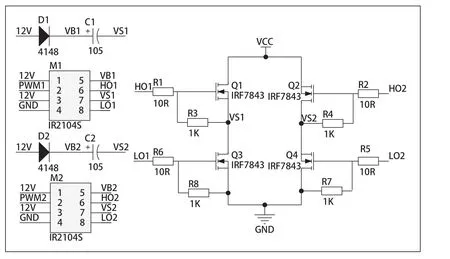
圖8 電機(jī)驅(qū)動電路原理圖
3.5 轉(zhuǎn)向和平衡控制模塊
自平衡方案轉(zhuǎn)向和平衡控制都依靠舵機(jī)完成。選用S3010舵機(jī),其壽命長,扭力大,具有很好的穩(wěn)定性和對車模平衡的控制能力。

圖9 S3010舵機(jī)實物圖
3.6 方向引導(dǎo)模塊
方案采用電磁方式循跡,選擇6.8nF電容和10mH電感配對采集電磁導(dǎo)引信號,經(jīng)過TI公司雙路低噪聲軌到軌運算放大器TLC2272放大后,進(jìn)行倍壓整流,得到波動較小的直流電壓信號。運放原理圖如圖10所示。

圖10 TLC2272運放電路原理圖
本平衡方案的方向引導(dǎo)模塊也可以依照實際情況轉(zhuǎn)而使用圖像引導(dǎo)。
4 軟件方案設(shè)計
對電單車采用平衡環(huán)、速度環(huán)、方向環(huán)三環(huán)控制。自平衡系統(tǒng)軟件流程圖如圖11所示。

圖11 自平衡系統(tǒng)軟件流程圖
4.1 平衡環(huán)控制
對于電單車的平衡環(huán)控制,需要實時監(jiān)測電單車的車身姿態(tài)。對ICM20602采集到的原始數(shù)據(jù)使用卡爾曼濾波進(jìn)行角度融合,能夠獲得較為準(zhǔn)確的實時角度。
通過位置式PID控制算法來維持單車平衡。比例項為方向傾角(橫滾角),積分項為比例項的和,微分項為左右方向的陀螺儀讀數(shù)。輸出控制舵機(jī)的PWM占空比從而改變舵機(jī)的轉(zhuǎn)角,最后實現(xiàn)平衡。
計算公式:

kp為PID比例系數(shù);ki 為PID積分系數(shù);kd為PID微分系數(shù);duty_steer為PWM占空比的控制量;angle_balance為方向傾角;angle_sum為比例項和;icm_gyro_x為左右方向的陀螺儀讀數(shù)。
橫滾角是指單車在水平方向上的左右傾角,橫滾角的確定是保證平衡的基礎(chǔ),由于電單車本身的結(jié)構(gòu)因素:車身左右重量不可能完全相等,往往會使小車在豎直靜止?fàn)顟B(tài)下向一個方向偏倒,即存在靜態(tài)誤差,在計算橫滾角時,需要在計算結(jié)果的基礎(chǔ)上加一個常數(shù)來消除這一靜態(tài)誤差[5]。
積分量直接關(guān)系到電單車傾角能否達(dá)到目標(biāo)傾角。目標(biāo)傾角越大則靜態(tài)誤差也會越大,在積分系數(shù)ki不夠大的情況下靜態(tài)誤差過大,很可能會導(dǎo)致電單車倒地。
按照單車的T-S模型[6],電單車后輪電機(jī)速度對單車的平衡環(huán)也會產(chǎn)生影響。單車速度越快會導(dǎo)致向心力更大,則相對應(yīng)的相同的單車姿態(tài)下,維持平衡所需要的舵機(jī)打角也不同。假設(shè)單車以勻速行駛,在過彎時可以用加減速來輔助平衡環(huán),達(dá)到更好的過彎效果。即在過彎時減速,在過彎后加速輔助回正。
電單車的平衡環(huán)控制結(jié)構(gòu)框圖如圖12所示。

圖12 平衡控制結(jié)構(gòu)框圖
4.2 速度環(huán)控制
電單車的速度利用編碼器形成閉環(huán)控制。使用編碼器測取電機(jī)速度信息,與目標(biāo)值進(jìn)行比對獲得控制偏差,對偏差采用增量式PID控制,輸出PWM信號,使該偏差趨于零。該方法在電單車面對包括平地和上下坡的多種路況時擁有良好的魯棒性。
電單車采用勻速行駛,同時配合加減速輔助單車平衡與轉(zhuǎn)向。電單車的速度越大則轉(zhuǎn)向時所需要的向心力越大,與之對應(yīng)產(chǎn)生的離心力就越大。輸入單車的實際傾角與目標(biāo)傾角的差值,若實際傾角小于目標(biāo)傾角則減速,反之則加速,這樣不但可以輔助單車的平衡,而且實際循跡的過程中能夠大大提高轉(zhuǎn)向的穩(wěn)定性和速度,入彎時減速,出彎后加速,達(dá)到過彎壓彎,且過彎后快速回正的效果。
速度控制結(jié)構(gòu)框圖如圖13所示。

圖13 速度控制結(jié)構(gòu)框圖
4.3 方向環(huán)控制
采用電磁方式進(jìn)行循跡,使用左右兩個水平電感的差比和監(jiān)測單車偏離路線程度和方向,經(jīng)過PD運算得到轉(zhuǎn)向期望傾角,將期望傾角疊加到平衡環(huán)的目標(biāo)值,即可實現(xiàn)單車循跡。
5 結(jié)論
基于電單車本身的結(jié)構(gòu)特性,提出了一種行之有效電單車的自平衡方案,控制精準(zhǔn),響應(yīng)快速。方案的突出優(yōu)點是系統(tǒng)造價便宜,且同時效果優(yōu)秀。該方案的設(shè)計為后續(xù)的自平衡電單車的廣泛運用提供了一定的參考。同時該方案中依舊有許多不足,對于不同的車模結(jié)構(gòu)同一套參數(shù)不能夠適用,所以后續(xù)需要為電單車加入機(jī)器學(xué)習(xí)的算法,能夠使電單車自己校正參數(shù)實現(xiàn)自適應(yīng)駕駛。