基于改進人工蜂群算法的多值屬性系統故障診斷策略
2022-08-05 10:31:18張志龍史賢俊
海軍航空大學學報 2022年3期
張志龍,陳 岑,史賢俊,蔣 勇
(1.海軍航空大學,山東 煙臺 264001;2.中國航天科工集團第二研究院706所,北京 100854)
0 引言
隨著航空航天、武器裝備等高新技術行業的發展,各種高端設備與產品的功能和結構越來越復雜,對安全運行的要求也日益嚴苛。測試性可提高系統測試與診斷能力、降低全壽命周期費用,其在裝備質量特性中的重要性逐漸凸顯。診斷策略作為測試性設計的重要組成部分,對于提高裝備故障診斷能力和診斷效率、降低期望測試費用有著重要的意義。
現有的大部分算法研究均是二值系統,即測試結果為“0”和“1”,二值系統的診斷策略問題被證明是NP 完全問題。而實際上,系統的測試結果不只是“通過”和“不通過”,還有可能是多個測試值。有多個測試值的測試被稱為多值測試,對應的系統是多值屬性系統(Multi-valued attribute system,MVAS)。
目前,許多專家學者對MVAS 的故障診斷策略進行了研究。總體上分為2類:一類是擴展二值測試序列尋優算法,基于測試值以及依賴矩陣的變化擴展傳統算法,得到MVAS 的測試序列尋優算法;另一類是將MVAS簡化為二值系統,隨后運用二值測試序列算法尋找最優測試序列,但簡化的MVAS會出現較多的冗余測試與模糊故障,從而遺漏許多測試信息。針對現有的研究,發現這些優化方法存在以下缺陷:
1)現有優化算法的優化目標單一,忽略了漏檢、虛警等不確定信息,使得最終的診斷策略最優性難以保證;
2)傳統的群智能算法與診斷策略尋優過程存在差異,容易簡化一些關鍵性問題,因此,尋優過程與群智能算法實現過程的合理融合是該類算法應用于MVAS診斷策略優化的關鍵。
人工蜂群算法(Artificial Bee Colony Algorithm,簡稱ABC 算法)作為群智能算法的主要代表,已成功解決了許多NP 完全問題,但卻無法直接應用于故障診斷策略。本文提出用ABC 算法向測試序列尋優過程擬合,改進后的ABC算法,記為NABC算法,通過制定狀態轉移規則和方向信息矩陣更新策略,實現NABC 算法與MVAS 診斷策略融合,并用導彈舵系統實例驗證了NABC算法的正確性。
1 診斷策略優化問題數學描述
1.1 構成要素


1.2 診斷策略優化目標
本文從測試成本、故障隔離時間、測試錯誤代價入手,建立多值測試故障診斷模型,開展診斷策略設計。診斷策略的3個優化指標計算公式如下。
1)平均測試成本。診斷策略優化問題最關注的就是測試成本。一般情況下,故障狀態的檢測和隔離是一系列測試設備工作和人為參與的結果,故該指標是開展故障診斷策略優化最主要的評價指標。診斷策略對應的測試費用越低,診斷策略就越優,平均測試成本,如式(1)所示。


2)平均故障隔離時間。系統一旦發生故障,維修測試人員通常希望能夠以最短的時間隔離故障,確定故障源以便于下一步維修。本文用隔離故障過程中所需的平均測試步驟來表示所需的測試時間,故障隔離所需測試時間越少,診斷策略就越優,平均故障隔離時間,如式(2)所示。

3)平均測試錯誤代價。由于測試不可靠因素的存在,測試會發生錯誤,使得本應被檢測出的故障被漏檢,正常的元件反而被“誤診”,由此產生“誤診”和漏檢代價疊加的情況。平均測試錯誤代價,如式(3)所示。



2 基于NABC算法的診斷策略優化方法
ABC算法無法直接應用于故障診斷策略,原因在于大部分算法都是將測試序列尋優過程向蜂群算法轉化,導致其搜索過程僅能確定1個測試,而不能為每個子集尋找最優測試,致使診斷結果差、運行時間長。
下面介紹ABC 算法向測試序列尋優過程擬合過程。
2.1 蜂群搜索過程
為將ABC算法與MVAS測試序列尋優過程融合,本文重新定義蜂群算法搜索過程。設定1 個蜂群(故障集)由個不同批次蜜蜂組成,蜂群被隨機放置某一位置(測試點)上,然后放任不同批次的蜜蜂尋找各自的最優食物源,尋優過程中每個食物源的位置代表1 個測試候選解,而所擁有的蜜量代表相應方向上的選擇概率的大小。
蜂群中的個體根據某種規則選擇尋找最優食物源的方向(測試),按照方向上設置的分流點(測試值)蜂群被分割為多個子蜂群,子蜂群重復上述選擇方向、分割種群的操作,直至所有批次的蜜蜂均已找到最優食物源。
設定子蜂群規模小于等于1,即找到最優食物源位置,此時認為最后選擇的測試即為最優食物源的位置所在,而蜜蜂尋找食物源時依次選擇的測試構成了診斷隔離故障的測試序列。
上述蜜蜂尋優的過程如圖1 所示,圖中的、…、a表示測試值,即分流點。

圖1 蜜蜂尋找最優食物源的搜索過程Fig.1 Process of bees searching for the optimal food source
為直觀介紹重新定義的人工蜂群,對比五元組在MVAS診斷策略和NABC算法中的含義,如表1所示。
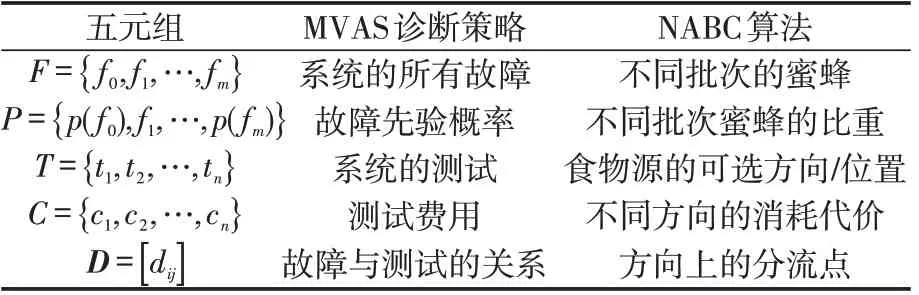
表1 MVAS診斷策略和NABC算法的五元組對比Tab.1 Comparison of five-tuple for MVAS diagnostic strategy and NABC algorithm
由表1 可知,重新定義的蜂群使得MVAS 的五元組有了新的含義,在此基礎上,還應設置狀態轉移規則、確定方向信息初始化及更新方式,才能實現所提算法在MVAS中的應用。
2.2 狀態轉移規則
傳統的ABC 算法通常以觀察蜂得到的食物源選擇概率來選擇最優食物源,而本文所提算法中定義的蜜蜂批次不同,為避免不同批次蜜蜂尋優過程混亂,故為不同批次蜜蜂設置不同的方向選擇概率,以表示測試間的關系,引入概率信息矩陣,如表2所示。

表2 方向概率信息矩陣Tab.2 Direction probability information matrix

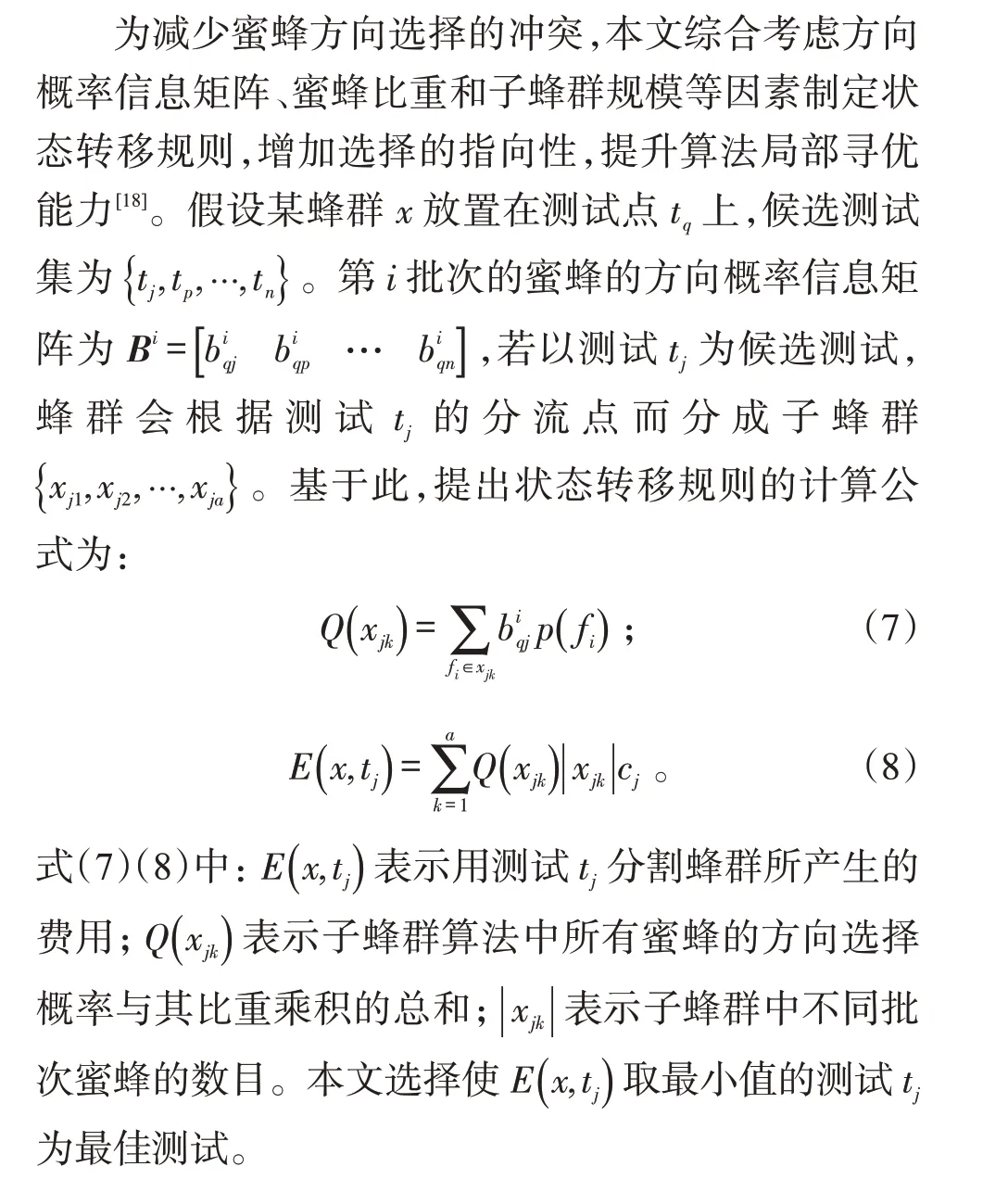
2.3 方向選擇概率更新


2.4 算法的實現流程
基于上述分析,NABC算法流程圖,如圖2所示。

圖2 NABC算法流程圖Fig.2 Flow chart of NABC
NABC算法具體流程步驟,如下所示。
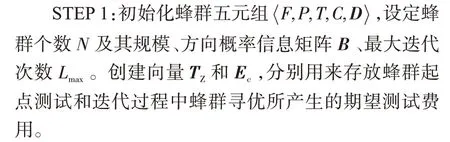
STEP 2:生成1 組1 維的向量,將測試集的個測試隨機賦予。
STEP 3:隨機將蜂群放置到的測試上,運用該測試將蜂群分割為個子蜂群。
STEP 4:利用式(7)和(8)從測試集中為個子蜂群選擇測試,并在每次選擇時留下一定量的觀察蜂,記錄該測試的方向選取概率,直到所有的子蜂群規模均小于等于1,存儲每個蜜蜂的測試序列。

3 實例應用與算法分析
3.1 導彈舵系統實例應用
以某型導彈舵系統及其放大器模塊為例,分別開展多值測試診斷策略優化設計工作,由于本文研究的系統為多值屬性系統,測試對不同的故障程度有不同的響應,故給出舵系統及其放大器模塊對應的多值相關性矩陣,見圖3和圖4。

圖3 舵系統的多值相關性矩陣Fig.3 Multi-valued correlation matrix of the rudder system

圖4 舵放大器電路的多值相關性矩陣Fig.4 Multi-valued correlation matrix of the rudder amplifier circuit


表3 故障模式及相關信息Tab.3 Failure mode and correlation information

表4 測試及測試信息Tab.4 Test and test information
舵系統及其放大器兩層次的測試成本、故障“誤診”和漏檢代價,見表5。其中,測試成本與測試錯誤代價并無量綱,是1個以某測試成本或某故障“誤診”、漏檢費用為基準的相對值。

表5 兩層次測試成本及錯誤診斷代價Tab.5 Two-level test cost and error diagnosis cost
首先,建立兩層次數學模型,均采用式(6);其次,運用本文所提的算法,參數設置分別為蜂群規模為60,迭代次數為20,初始方向選擇概率均為1,3種代價權重系數均設置為1/3;最后,分別針對舵系統層次和放大器電路層次開展診斷策略優化設計工作。
表6給出3種算法得出的舵系統層次診斷策略方案對應的評價指標,由于本文算法的平均測試成本和平均故障隔離時間明顯減少,故選擇NABC算法進行診斷策略優化。

表6 不同算法診斷策略指標對比Tab.6 Comparison of diagnosis strategy indicators of different algorithms
現給出本文算法對應的診斷樹,如圖5 所示。可以看出,舵系統診斷策略中存在故障模糊組、和,即電動機模塊故障模式難以通過現有可用測試進行隔離,需要額外添加測試項進一步進行隔離診斷分析。

圖5 舵系統診斷樹Fig.5 Diagnostic tree of the rudder system


同理,將蜂群起點測試依次選為~,得到對應的測試代價,比較得出的測試代價最小,故放在上的蜂群獲得最優方向。然后,根據式(9)和(10)更新該方向上的觀察蜂數目,即方向概率信息矩陣,繼續循環直至達到最大迭代次數。在此給出舵系統放大器模塊的診斷樹,如圖6所示。

圖6 舵系統放大器模塊診斷樹Fig.6 Diagnostic tree of rudder system amplifier module
經過診斷策略對比可知,NABC 算法相比于其他算法,較好地兼顧了測試成本和故障隔離時間。通過圖5 和圖6 的故障診斷樹可以看出,利用NABC 算法進行診斷策略構建,不僅滿足了實際工程中多值系統的測試診斷需求,而且在測試診斷過程中很好地兼顧了測試成本、故障隔離時間和錯誤診斷代價。
3.2 算法分析
下面進行診斷策略優化算法分析,用MATLAB編程仿真,并將NABC算法與傳統故障診斷算法——多值Rollout 算法、多值IG 算法和ABC 算法,進行比較分析。
用以上4種算法在20、40、60維方陣中分別運行,且方陣元素在{0,1,2,3}中隨機取值,測試費用在1~2之間隨機取值,算法的種群數量設置為方陣階數,最大迭代次數為20,算法運行次數設為10次。本文主要分析期望測試費用與運行時間2 項指標,圖7 是維數為60的10次計算結果。

圖7 基于4種算法的多值D60×60 矩陣計算結果Fig.7 Calculation results of multi-valued matrix D60×60 based on four algorithms
由圖7 可知,NABC 算法的平均期望測試費用和平均運行時間均小于ABC算法,原因在于本文將蜂群算法實現過程簡化并重新定義,以實現與MVAS診斷策略尋優過程的融合,同時引入方向概率信息矩陣,為算法的狀態轉移增加指向性,改善了診斷策略的結果和算法的尋優速度。而ABC算法則對參數要求高,循環次數較多,造成診斷結果差、運行時間長的問題。
NABC 算法的平均期望測試費用小于多值Rollout算法,而平均運行時間大于多值Rollout算法,這是因為NABC 算法的迭代優化了蜂群尋找最優食物源的過程,獲得了更好的測試序列,同時也因為迭代次數的增多使得運行時間增加。
與多值IG算法相比,NABC算法的平均期望測試費用較小,這是因為多值IG 算法是1 種貪婪算法,只能實現一步向前尋優,而NABC算法可實現多步向前尋優,從而可獲得近似最優結果,而平均運行時間的增加也是由于迭代次數的增多造成的。
4 結束語
診斷策略優化問題是典型的組合優化問題,目前提出的啟發式搜索方法大多僅考慮測試成本,難以滿足裝備測試實際需求,不能實現快速有效尋優。同時,多值測試的診斷策略優化設計問題是1 個計算爆炸問題,全局最優算法不適用于復雜多值屬性系統測試診斷策略優化。本文在傳統ABC算法的基礎上,研究了工程上應用更多的多值屬性系統故障診斷策略問題,提出將蜂群算法實現過程簡化并重新定義,以實現與MVAS診斷策略尋優過程的融合,同時以觀察蜂概率選擇食物源為啟發,引入方向概率信息矩陣,為算法的狀態轉移增加指向性。經導彈舵系統實例驗證,證明了本文提出的算法能獲得較優的診斷策略,是1種有效的方法,具有一定的應用價值。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
