施工過程安全數字孿生模型的構建和應用*
2022-08-06 03:30:12趙挺生
中國安全生產科學技術 2022年6期
周 煒,王 亮,趙挺生,陳 磊,李 聰
(1.中建三局第一建設工程有限責任公司,湖北 武漢 430040;2.華中科技大學 土木與水利工程學院,湖北 武漢 430074)
0 引言
建筑工程存在大量高風險、工藝流程復雜、技術難度大的施工過程(如起重機械安拆、土石方開挖等),針對該類施工過程進行重點監控是現場安全管理的重要環節。受施工現場多源風險耦合和動態環境作用,傳統人工巡檢方式因實時性和準確性局限,無法對施工活動的工藝流程、安全技術參數和風險等進行動態控制[1]。
基于物聯傳感技術能夠實時感知施工過程特定參數[2],判斷特定實體(如工作步)是否滿足安全閾值[3-4],但施工過程包含大量流程邏輯規則和技術參數關聯關系,難以被數字化表達,現有技術無法感知和判斷時空維度下施工過程系統的整體行為和屬性(如工序進程、動態風險等),難以實現對施工過程整體的安全控制,制約對施工過程安全的智慧監控。
隨著數字化技術不斷發展,數字孿生成為各個領域的研究熱點。在NASA技術報告中,數字孿生(Digital Twin,DT)被正式提出并被定義為“集成了多物理量、多尺度、多概率的系統或飛行器仿真過程”[5]。數字孿生以數字化方式建立多維、多時空尺度、多物理量的虛擬實體,能夠實時仿真和刻畫物理實體在真實環境中的屬性、行為、規則等[6-7]。王佳奇等[8]基于數字孿生構建瓦斯事故孿生模型,實現瓦斯事故的事前預防和快速響應;Boje等[9]指出數字孿生提供物理活動與虛擬世界同步手段,結合仿真和預測方法可為實現施工過程安全的動態監控提供技術支持。
本文基于本體建立施工過程安全的語義本體,明確施工過程安全關鍵知識要素,構建施工過程安全數字孿生多維模型,基于物聯網和有限狀態機闡述模型實現施工過程安全控制的方法,并以某塔吊頂升活動安全監控為例進行實際運用。研究結果可為實現施工過程全要素數字化、減少安全事故提供指導。
1 施工過程安全知識分析
為實現施工過程安全在虛擬世界中的數字化表達,系統分析施工過程安全管理知識,獲取施工過程關鍵知識要素,建立各類知識要素數據元。
在施工安全領域,本體憑借知識表達、共享、推理和機器可讀能力引起學者關注,大量安全本體被用以整合和結構化表達各類型安全知識[10-11]。通過系統分析施工過程相關工藝流程和安全管理要求,建立施工過程安全語義本體,如圖1所示,可用于可視化表達施工過程安全知識中各類概念及概念間相互關系。
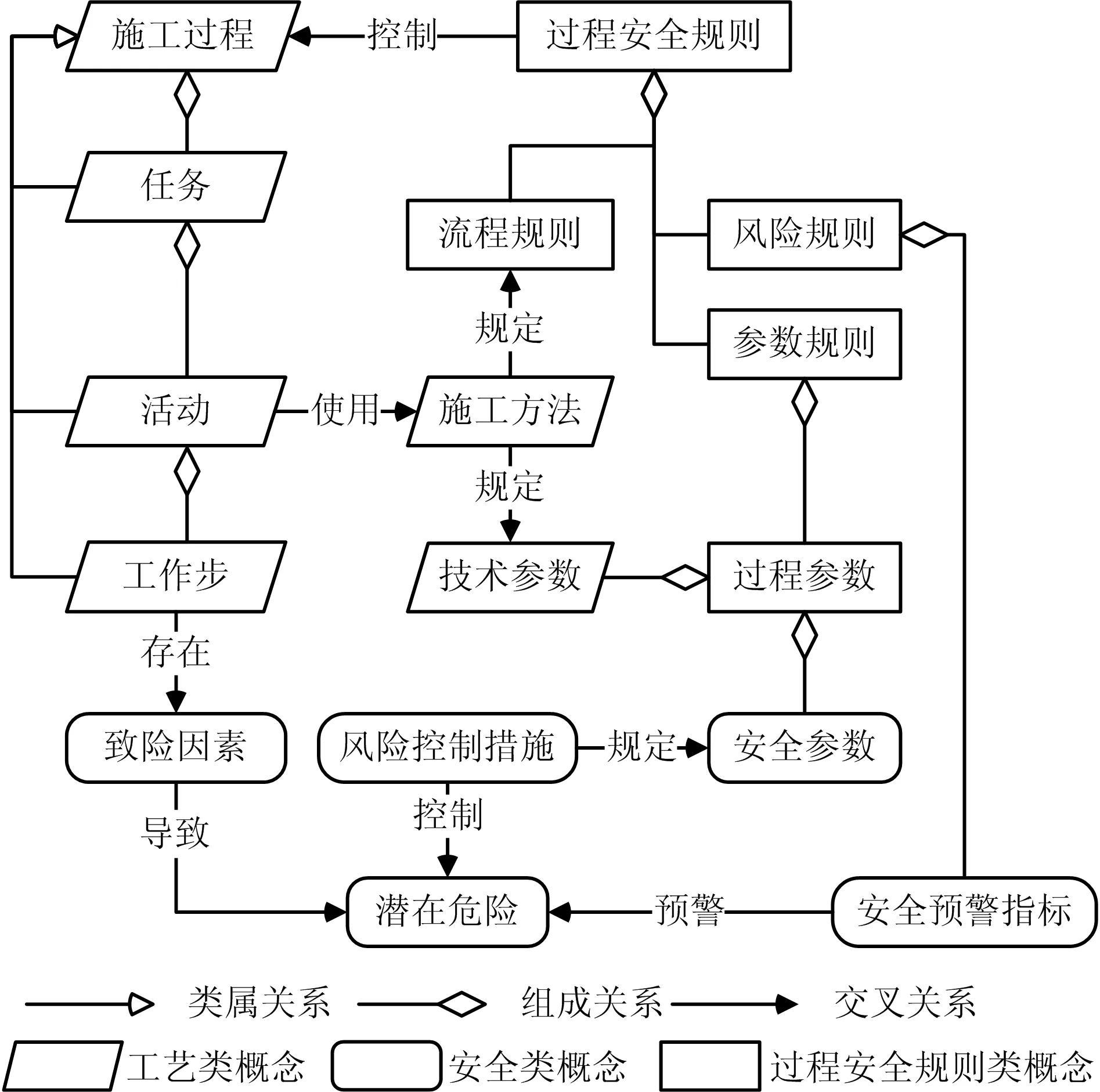
圖1 施工過程安全語義本體
施工過程安全語義本體描述3類概念(工藝類概念、安全類概念和過程安全規則類概念)以及各概念之間的鏈路關系。工藝類概念包含施工過程、任務、活動、工作步、施工方法和技術參數等概念。其中,任務、活動和工作步為施工過程的子類,同時也描述施工過程層級;工作任務是施工過程的子過程,每個工作任務由1套活動組成,每個活動由不同工作步構成。施工方法規定工作步遵循的流程規則和技術參數。
安全類概念包含致險因素、潛在危險、風險控制措施、安全預警指標和安全參數等。工作步與致險因素通過“存在”關系鏈接,表述工作步中存在的致險因素。致險因素指引發施工過程中各類潛在危險(如塔吊倒塌和塔臂折斷等)的因素,即致險因素“導致”潛在危險。通過制定風險控制措施對施工過程中的潛在危險進行“控制”,風險控制措施中“規定”執行工作步安全參數。此外,通過構建安全預警指標,能夠對潛在危險進行“預警”。
過程安全規則類概念包含過程安全規則、流程規則、參數規則、風險規則和過程參數等。過程安全規則“控制”施工過程,是過程作業安全的控制條件,由流程規則、參數規則和安全規則共同構成:流程規則描述執行工作步遵循的工藝流程,而工藝流程由施工方法決定,所以施工方法“規定”流程規則;參數規則描述開始/結束工作步前需滿足準入條件/準出條件,過程參數包含技術參數和安全參數,用于構建工作步的準入條件/準出條件,所以過程參數是參數規則的一部分;風險規則描述執行工作步需要監控的警情狀況,由安全預警指標組成。
綜上,施工過程安全語義本體中工藝類、安全類和過程安全規則類概念是虛擬世界中刻畫施工過程安全的關鍵知識要素。
2 施工過程安全數字孿生模型
2.1 模型構成
結合施工過程安全關鍵要素和陶飛等[12]提出的數字孿生五維模型,構建施工過程安全數字孿生模型(Construction Process Safety Digital Twin,CPS-DT),模型結構如圖2所示。該模型建立施工過程安全的虛實雙向交互的映射機制,為施工過程中安全數據融合和安全智慧監控提供參考架構,為施工過程安全管理提供更加實時、高效和智能的服務。

圖2 施工過程安全數字孿生模型
施工過程安全數字模型包含施工過程物理實體PPE,施工過程安全虛擬實體PVE,施工過程安全孿生數據PDD,安全控制服務SCS和各組成部分間的連接CN等,可定義為5元組MCPS如式(1)所示:
MCPS=(PPE,PVE,PDD,SCS,CN)
(1)
在PPE上布設數據采集裝置,通過物聯網手段實時感知和存儲施工監測數據。PVE以數字化方式刻畫施工過程物理實體,動態描述施工過程安全要素狀態,是能被計算機識別的數字模型。PVE包含施工過程模型RV和安全仿真模型BV:RV基于施工過程安全語義本體建立,能夠存儲施工過程安全的知識要素,形成施工工藝、施工安全和過程安全規則數據;BV是基于RV建立施工過程安全的仿真模型,能夠在物聯網采集數據驅動下對PPE實時仿真,輸出施工過程安全狀態,例如當前工作步、過程參數的時間序列以及當前安全風險。PDD是通過PVE建模和物聯網采集數據手段構建現實世界施工過程安全向數字世界的映射。SCS為PDD驅動下通過既定規則和物聯網傳輸手段開展操作指引、安全預警和動態控制等服務,實現對現實世界施工作業工人和機械設備的實時控制。CN為MCPS模型各組分的互聯,是模型各組分交互的渠道。
2.2 模型實施方法
結合施工過程安全數字孿生模型、物聯網技術和有限狀態機,施工過程安全監控實現流程包括以下4個步驟:
步驟1):確定現實世界中施工過程物理實體PPE,根據施工過程安全語義本體,從施工方案中提取PPE的關鍵知識要素,將施工過程安全知識參數化存儲于特定的物理結構中,表達為計算機能識別的施工過程模型RV。
步驟2):選取施工過程模型RV中過程參數和安全預警指標為監測內容,在施工過程物理實體PPE上布設物聯網數據采集裝置和預警裝置,施工過程中實時采集信息,獲取施工監測數據,并實時接收控制指令進行安全預警。
步驟3):建立RV的安全仿真模型BV,BV在施工監測數據驅動下實時仿真,分析施工過程物理實體PPE的實時行為,存儲過程仿真數據。
采用有限狀態機(Finite State Machine,FSM)方法建立BV。FSM是1種輸入輸出系統,表示有限狀態及狀態間轉移和動作等行為的模型[13]。設FSM為5元組如式(2)所示:
F=(S,O,E,T,W)
(2)
式中:S為有限狀態集;O為特定狀態下執行的輸出動作集;E為能夠接收的輸入事件集;T為狀態轉移函數,T:S×E→S規定狀態和事件的映射邏輯,代表狀態間的跳轉邏輯;W為輸出函數,W:S→O規定狀態和動作的映射邏輯,代表不同狀態執行的動作。
具體實現方式包括:建立施工過程安全狀態機,設置S存儲施工過程工作步;E存儲過程參數和參數規則;O存儲安全預警指標和風險規則;將工作步和過程參數與流程規則和參數規則結合建立T;以工作步和關聯安全預警指標,結合風險規則構建W。當施工監測數據觸發E中過程參數滿足參數規則時,驅動狀態機實時仿真,執行T和W,輸出當前工作步、過程參數和安全警情指標時間序列,存儲過程仿真數據。
步驟4):建立安全控制服務SCS,在PDD驅動下進行數據分析和風險決策,實時將控制信息反饋至PPE。
3 案例實證
塔吊頂升活動是具有代表性的高風險施工過程[14]。本文以某項目TC6013型塔吊頂升活動為例,具體說明施工過程安全數字孿生模型的應用。
3.1 塔吊頂升過程模型
選取待監控的塔吊頂升活動,從專項施工方案中提取頂升活動的關鍵知識要素,見表1。建立塔吊頂升施工過程模型,將施工工藝數據和風險控制數據存儲于計算機中。

表1 塔吊頂升活動關鍵知識要素
3.2 數據采集和傳輸
根據塔吊頂升活動的過程參數和安全預警指標,制定監測方案,見表2。在施工現場布設數據采集裝置、預警設備、物聯網傳輸裝置和服務器,搭建塔吊頂升活動物聯網監控系統,如圖3所示。數據采集裝置實時感知現實世界塔吊頂升活動監測指標狀態,物聯網傳輸裝置采用RFID、WIFI和5G等方式建立施工監測數據和安全控制信息的無線傳輸通道,服務器構建數據庫動態存儲塔吊頂升活動數字孿生數據,并為虛擬世界中安全動態仿真和安全控制提供計算和存儲資源。

圖3 塔吊頂升活動物聯網監控系統

表2 塔吊頂升活動監測方案
3.3 安全仿真模型建立
基于FSM建立塔吊頂升活動狀態機,在施工監測數據驅動下,對現實塔吊頂升活動進行仿真,實時輸出塔吊頂升活動工作步、過程參數和安全指標狀態等過程仿真數據,如圖4所示。頂升活動所有工作步jobi轉化為FSM狀態集S。構建輸入事件集E={ei/i=1,2,…,9}存儲工作步關聯的過程參數,ei用監測指標規則組合表示。例如表1中job3關聯的過程參數涉及監測指標P1,P2,P3,P4,根據監測變量閾值e3可表示為“P3∈[1.45 m,1.55 m]∧P1=1∧P2=1∧P4∈[0,0.5 m/min]”。構建輸出動作集O={oi/i=1,2,…,9},存儲工作步關聯的安全預警指標。例如表1中job6關聯的安全預警指標為塔身傾斜度、風速和頂升速度等,則o6表示為P4∈[0,0.5 m/min]∧P8∈[-14.4″,14.4″]∧P9∈[0,8 m/s]”。依據頂升活動的串聯流程和輸入事件,構建狀態轉移函數T:S×E→S,其中T(ei,jobi)=jobi+1;依據頂升活動各工作步與輸出動作的對應關系,構建輸出函數W:S→O,其中W(jobi)=oi。

圖4 塔吊頂升活動狀態機
3.4 塔吊頂升安全監控
1)控制內容
根據控制理論[15]和CPS-DT的安全控制服務,建立塔吊頂升安全控制結構,如圖5所示。控制結構由受控對象、執行器、感知器和輸入輸出構成。控制結構的控制器為塔吊安全控制服務,受控對象是塔吊頂升活動,執行器為現場工人,通過接收控制器的控制指令,調整施工操作;感知器為塔吊頂升活動數字孿生數據,實時為控制器提供開展塔吊安全控制服務信息。

圖5 塔吊頂升安全控制結構
參考施工過程安全關鍵知識要素,塔吊頂升安全控制涉及施工過程的工作步流程、過程參數和安全風險等,目標函數如式(3)~(6)所示:
OptF[Job,Pr,Pa,Sr]
(3)
Pr=[job(i,i+1)]
(4)
Pa=[pa(jobt)]
(5)
Sr=[sr(jobt)]
(6)
式中:Job代表工作步;Pr表示工作步流程執行情況;Pa表示過程參數執行情況;Sr表示安全風險狀態;job(i,i+1)為工作步轉移向量;pa(jobt)為過程參數狀態值向量;pa(jobt)為安全預警指標狀態值向量。
塔吊頂升安全控制使施工過程中各工作步實時滿足流程規則、參數規則和風險規則要求,約束條件如式(7)所示:
(7)
式中:CPr為規定的流程規則;Cvalue_pa為參數規則;Cvalue_sr為風險規則。
2)效果分析
將施工過程安全數字孿生模型運用于塔吊頂升活動,實現塔吊頂升安全監控。主要效果包括3個部分:①通過物聯網手段動態感知塔吊頂升活動安全信息,數據驅動下仿真模型可實時對頂升活動安全進行分析和決策,部分監測指標和工序時程示例如圖6所示。②依據頂升活動工序進展,控制系統可結合頂升活動關鍵知識要素對塔吊工人進行操作指引,在執行施工動作前語音播報施工工藝和技術要求,指導工人施工。③塔吊工人執行工作步過程中,控制系統依據數字孿生數據,實時判別各工作步的安全偏差,進行語音播報預警,實時提醒工人調整施工操作行為,滿足安全施工流程、參數和風險規則,實現塔吊頂升活動安全控制目標。

圖6 塔吊頂升活動安全監控時程
4 結論
1)通過定義施工過程安全語義本體,可對施工過程安全知識進行可視化表達,明確施工過程安全關鍵知識要素包含工藝類、安全類和過程安全規則類概念。
2)基于數字孿生構建施工過程安全數字孿生模型,闡述模型構成和機理,建立施工過程安全數字化表達和安全智慧監控實施方法。
3)以塔吊頂升活動為例,詳細介紹施工過程安全數字孿生模型實施步驟,綜合運用物聯網技術和有限狀態機實現塔吊頂升活動安全監控。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
中老年保健(2021年2期)2021-08-22 07:31:10
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
海峽姐妹(2018年3期)2018-05-09 08:20:40
Coco薇(2017年11期)2018-01-03 20:59:57