自適應巡航目標跟蹤不釋放問題分析及策略優化
2022-08-09 12:22:20王孔龍馮程姜志豪鄭丹陳音
公路與汽運 2022年3期
王孔龍, 馮程, 姜志豪, 鄭丹, 陳音
(北京市北汽股份有限公司 汽車研究院, 北京 101300)
汽車毫米波雷達在接收到ADC采樣數據后,通過雷達信號處理,得到距離、速度和角度等原始點跡,對這些原始點跡數據使用目標跟蹤算法進行處理,即可得到目標的估計位置和速度,形成目標的運動軌跡,自適應巡航系統根據該運動軌跡決策主車的下一步動作。由于現實道路上狀況復雜多變,常規測試難以涵蓋所有場景,要讓智能駕駛的安全性適應于所有現實道路,需不斷完善自適應巡航系統的硬件性能和軟件算法。
在自適應巡航控制(ACC)對前方目標物的識別方面,文獻[1]對如何選擇安全合理的跟蹤目標開展研究,針對城市擁堵工況,提出以系統整體架構為基礎的分層式控制策略及基于道路傳感數據的彎道限速模型,制定了兩車運動狀態線性相關的安全距離模型;文獻[2]基于目標跟蹤開展前方有效目標識別算法研究,通過多目標直道和多目標定曲率彎道2種工況下初步場地試驗,探索自適應巡航控制系統對于前方有效目標的識別方法;文獻[3]為提高自適應巡航系統對目標數據識別的連續性和穩定性,根據目標識別和目標跟蹤的不同特點,在對毫米波雷達信號初步濾波的基礎上,開發了具備目標識別、跟蹤及功能切換的算法;文獻[4]針對工程應用中汽車毫米波雷達的目標追蹤問題,對雷達數據處理中的滑窗法、最近鄰域法和最優匹配法進行了研究。這些研究對運動軌跡識別后如何反應才是合理的未作分析,且只是針對道路上常見場景,未涉及偶發的特殊場景。而如何在常見場景的基礎上進一步涵蓋特殊場景是智能駕駛安全的發展方向。該文針對某車自適應巡航系統對跟蹤的前方目標物近距離快速切出后信號始終不釋放的異常反應進行分析,優化自適應巡航系統的識別算法邏輯。
1 問題描述
某車開啟自適應巡航系統在路口跟隨前方車輛轉彎,前車車身轉過一定角度后保持靜止,待對向直行車輛通過后加速拐彎離開,此時該車的自適應巡航系統仍認為前車在前方靜止,始終保持靜止跟隨狀態,導致交通堵塞。駕駛員只得退出自適應巡航系統,主動接管車輛,進而對自適應巡航系統的目標物識別可靠性產生擔憂。
經反復測試,該車跟隨前車跟停,前車車身轉過一定角度后,該車只能看到前車的半個車尾,即只能看到一側的后尾燈,此時不論前車是左轉彎還是右轉彎,只要是快速駛離,都會有較大概率導致自適應巡航系統的前方目標跟蹤不釋放,即始終認為前方還有車輛,從而保持自車(進行自適應巡航系統測試分析的車輛,下同)靜止。這類現象發生時,自適應巡航系統探測的前方目標物距離多在5 m以內。
該車自適應巡航系統硬件架構為一個前向毫米波雷達加一個前向攝像頭,由前向毫米波雷達進行主要識別和分析,并將結果發給前向攝像頭進行確認,兩者均對目標確認后,才發出目標物消失請釋放制動或前方目標物存在請保持制動的請求信號。
2 問題分析
為避免目標物信號干擾,降低對目標物識別的運算量,自適應巡航系統的控制算法針對前方橫向移動的目標物會進行先行過濾,故當前方車輛斜向靜止時,有一定概率不能被自適應巡航系統識別。這就意味著前方車輛的斜向放置存在一個臨界角度能被自適應巡航系統識別為前方目標物并進行跟蹤,如果在跟蹤過程中前方車輛的斜向放置角度越過臨界角度,自適應巡航系統將認為前方沒有目標物,進而按照駕駛員設定的速度控制車輛前行。此時前方目標物如果仍然在原地靜止,而自適應巡航系統自行退出,則存在碰撞風險。
前方目標物探測信號發生跳變的現象有很多,如前方目標物切出當前車道、前方目標物快速轉彎駛離、前方目標物由縱向行駛快速變為橫向行駛且離開當前車道等。對于這些場景,都需要自適應巡航系統能及時作出正確的反應。
若前方車輛加速駛離后,自適應巡航系統仍然默認前方車輛還在前方,從而繼續保持等待狀態,此時車輛上相關網絡信號見圖1。自適應巡航系統一直在不同狀態之間切換,而前方目標物距離始終在4 m。期間,駕駛員主動踩油門使ACC進入駕駛員超控狀態,自適應巡航系統進入巡航控制狀態,驅動車輛前進,自適應巡航系統隨即因為前方有靜止目標車輛制動至靜止狀態,轉而進入靜止激活狀態,隨后進入靜止等待狀態,期間前方目標物始終未丟失,前方目標物探測信號也始終處于檢測到目標狀態。但實際上前方車輛已駛離,自適應巡航系統這樣的反應違背設計初衷,會導致追尾的潛在風險。
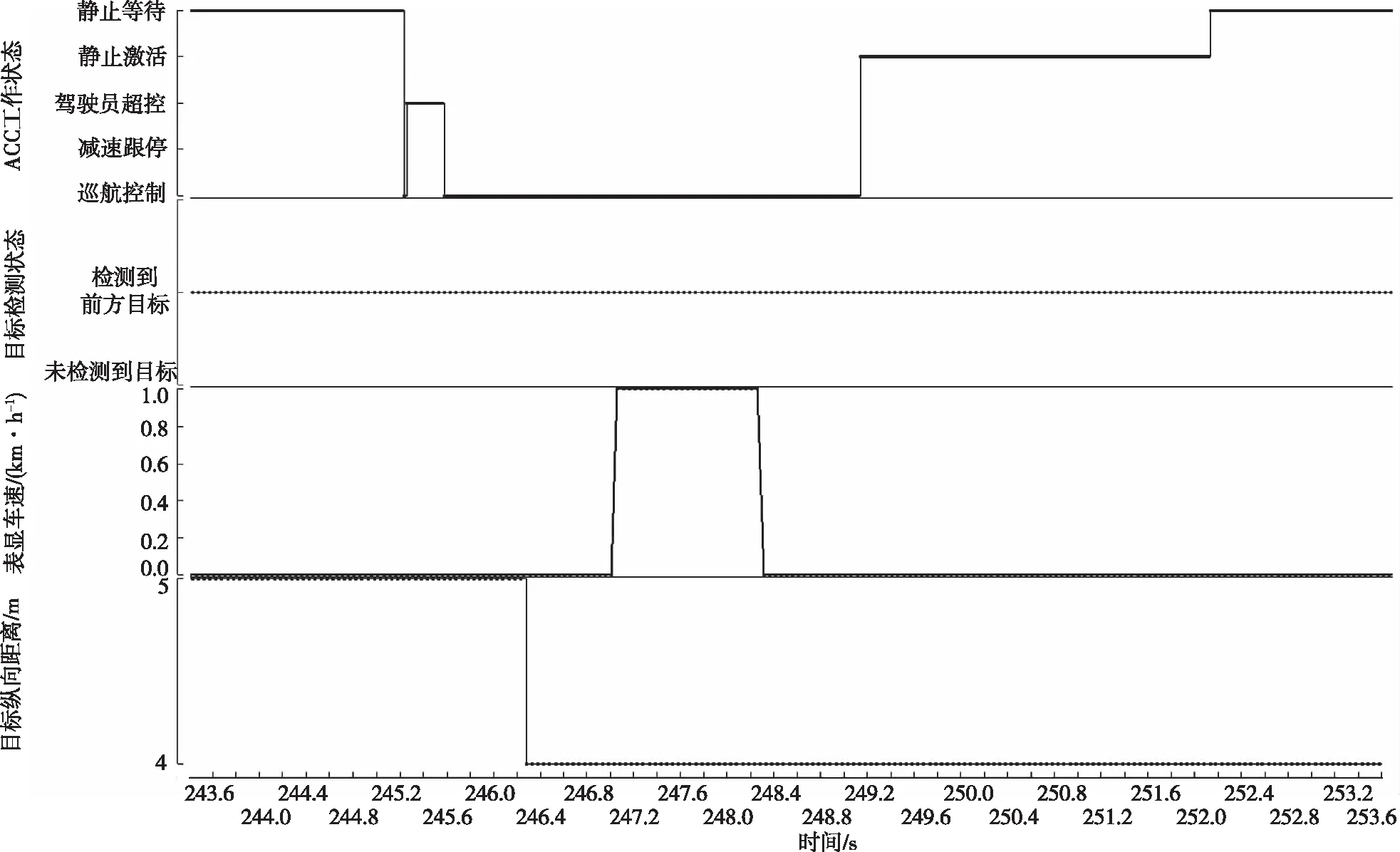
圖1 某車自適應巡航系統在前方目標物拐彎駛離后仍處于等待狀態時的網絡信號
3 改進與驗證
自適應巡航系統的設計初衷是在盡可能保證安全的情況下,極大釋放駕駛員,提升用戶駕駛體驗。為保障車輛與駕駛安全,在自適應巡航系統的識別算法中增強目標檢測與目標速度判斷,并加入軌跡預測策略以提升目標檢測的魯棒性,同時優化雷達目標識別的確認邏輯。其識別策略優化見圖2。

圖2 跟蹤目標丟失問題的識別策略及優化
當前方目標物在距離5 m內突然丟失時,系統會根據目標車輛的行駛軌跡預測是否是正常切出本車道的狀態。如果是,則釋放前方目標物信號,請求車輛繼續行駛;如果前方車輛是處于直行狀態而突然消失,則緊急退出自適應巡航系統,將車輛控制權交由駕駛員。
加入軌跡預測策略,優化雷達目標識別的確認邏輯后,經多次測試,自適應巡航系統在遇到前方目標物近距離拐彎快速駛離時均能及時釋放前方目標物,保持自適應巡航系統無前方目標物的工作邏輯,繼續正常行駛。測得的相關網絡信號見圖3。
從圖3可看出:自適應巡航系統控制車輛逐步跟近前方目標,距離3 m時,前方車輛拐彎加速駛離,檢測狀態由檢測到前方目標變為未檢測到目標,突然探測不到前方目標,此時ACC狀態從巡航控制模式短暫切換到靜止激活狀態,隨即又進入巡航控制模式繼續正常行駛,車速也由靜止逐步升高,自適應巡航系統控制車輛穩步提速。可見,自適應巡航系統反應正常,優化策略有效。

圖3 優化后自適應巡航系統遇到前方車輛拐彎駛離后的網絡信號
4 結語
受限于當前傳感器的性能,前方目標物的識別對于自適應巡航系統是一大挑戰,不僅要求硬件不斷優化識別能力,還要求從識別算法上優化邏輯,加入前方目標物軌跡預測等策略來彌補硬件的性能盲區。總體來說,自適應巡航系統工作時的安全主體是駕駛員,在自適應巡航系統無法作出正確判斷時,降低車速并保持正常路線繼續行駛,將可能帶來的誤判后碰撞風險交由駕駛員執行,保持道路通暢的同時避免對道路上其他交通參與者帶來額外風險。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
房地產導刊(2022年5期)2022-06-01 06:20:14
汽車實用技術(2022年4期)2022-03-07 06:07:20
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
公民與法治(2016年4期)2016-05-17 04:09:26
