基于神經(jīng)網(wǎng)絡(luò)和模糊補(bǔ)償?shù)乃聶C(jī)械臂控制
2022-08-09 05:49:30張曉暉高玉兒楊啟航
計(jì)算機(jī)工程與應(yīng)用 2022年15期
關(guān)鍵詞:機(jī)械
高 陽,張曉暉,高玉兒,尚 婷,楊啟航
西安理工大學(xué) 自動(dòng)化與信息工程學(xué)院,西安 710048
水下機(jī)械臂在海洋資源的開發(fā)和利用過程中扮演的角色越來越重要,它已成為水下機(jī)器人進(jìn)行深海資源研究與勘探的重要工具,在海洋探索和資源開發(fā)中起到至關(guān)重要的作用[1]。與傳統(tǒng)的工業(yè)機(jī)械臂相比,水下機(jī)械臂動(dòng)力學(xué)模型具有時(shí)變、非線性、外部干擾和水動(dòng)力干擾的特點(diǎn),成為限制水下機(jī)械臂作業(yè)的主要因素。為進(jìn)一步提升水下機(jī)械臂的運(yùn)動(dòng)性能,需要對(duì)水下機(jī)械臂的動(dòng)力學(xué)模型以及運(yùn)動(dòng)控制方法進(jìn)行更進(jìn)一步的研究[2]。
國內(nèi)外學(xué)者在水下機(jī)械臂的控制方面提出許多方法。謝宏等[3]提出了機(jī)械臂卷積神經(jīng)網(wǎng)絡(luò)滑模軌跡跟蹤控制方法,通過此算法實(shí)現(xiàn)對(duì)機(jī)械臂軌跡跟蹤的精確控制;魏娟等[4]提出了一種改進(jìn)的徑向基函數(shù)模糊神經(jīng)網(wǎng)絡(luò)算法來控制機(jī)械臂,使得控制系統(tǒng)的控制精度提高、收斂速度加快,有著良好的魯棒性和控制性;Soltanpour等[5]提出了一種用于機(jī)器人手臂位置跟蹤控制的模糊自適應(yīng)滑模控制,降低了輸入的計(jì)算量和抖動(dòng)現(xiàn)象;劉建昌等[6]設(shè)計(jì)的高斯徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)補(bǔ)償器可有效地補(bǔ)償機(jī)械臂動(dòng)力學(xué)模型的非線性,并具有較強(qiáng)的泛化能力和自適應(yīng)能力;He等[7]采用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對(duì)機(jī)器人的動(dòng)力學(xué)進(jìn)行估計(jì),成功地補(bǔ)償了系統(tǒng)不確定性影響,提高了機(jī)器人系統(tǒng)的魯棒性;楊亮等[8]采用RBF神經(jīng)網(wǎng)絡(luò)處理動(dòng)力學(xué)參數(shù)不確定問題,將動(dòng)力學(xué)分成兩部分,分別設(shè)計(jì)兩個(gè)神經(jīng)網(wǎng)絡(luò)同時(shí)處理,較好地克服電機(jī)參數(shù)漂移對(duì)跟蹤控制性能的影響;徐智浩等[9]設(shè)計(jì)一種自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)控制器,采用模糊神經(jīng)網(wǎng)絡(luò)補(bǔ)償器,實(shí)現(xiàn)對(duì)系統(tǒng)中包括LuGre摩擦在內(nèi)的非線性環(huán)節(jié)的逼近,并利用滑模控制項(xiàng)減小逼近并利用滑模控制項(xiàng)減小逼近誤差。
RBF神經(jīng)網(wǎng)絡(luò)對(duì)非線性連續(xù)函數(shù)有著優(yōu)良的動(dòng)態(tài)逼近能力與自適應(yīng)能力,能夠以任意精度近似各種非線性函數(shù)和動(dòng)態(tài)系統(tǒng),且學(xué)習(xí)收斂速度快,需要的條件較少,網(wǎng)絡(luò)結(jié)構(gòu)簡(jiǎn)單,具有良好的泛化能力,能夠大幅度提高設(shè)計(jì)和仿真的效率。因此,通過將RBF神經(jīng)網(wǎng)絡(luò)與傳統(tǒng)滑模控制相結(jié)合,能夠有效地改善滑模控制的“抖振”缺陷。但神經(jīng)網(wǎng)絡(luò)逼近分段連續(xù)函數(shù)的能力較差正是其進(jìn)行摩擦補(bǔ)償?shù)碾y點(diǎn)所在,對(duì)于摩擦這類難以精確獲取模型的參數(shù),模糊補(bǔ)償方法簡(jiǎn)單,不要求被控系統(tǒng)的精確數(shù)學(xué)模型,有著良好的動(dòng)態(tài)性能。
基于以上研究,本文針對(duì)水下機(jī)械臂動(dòng)力學(xué)建模復(fù)雜且控制算法精度不高的現(xiàn)有問題,建立了水下機(jī)械臂的精準(zhǔn)動(dòng)力學(xué)模型,并結(jié)合RBF神經(jīng)網(wǎng)絡(luò)控制和模糊控制在滑模控制器優(yōu)化設(shè)計(jì)過程中的有效性,提出一種復(fù)合控制策略,該策略使用RBF神經(jīng)網(wǎng)絡(luò)逼近建模參數(shù)的不確定項(xiàng),利用模糊控制補(bǔ)償摩擦力造成的建模影響。通過仿真實(shí)驗(yàn)驗(yàn)證,本文針對(duì)水下機(jī)械臂提出的控制算法有較好的綜合控制性能,能夠?qū)崿F(xiàn)良好的控制效果。
1 建立水下機(jī)械臂動(dòng)力學(xué)模型
Lagrange法是通過計(jì)算控制系統(tǒng)的動(dòng)能和勢(shì)能,基于Lagrange約束得到動(dòng)力學(xué)方程。由Lagrange法可以得到一組形式簡(jiǎn)潔的動(dòng)力學(xué)方程,適合于計(jì)算機(jī)高速求解。本文使用Lagrange法求解機(jī)械臂動(dòng)力學(xué)方程[10]。理想機(jī)械臂的動(dòng)力學(xué)模型為:

式中,MB(θ)是n×n階正定慣性力矩陣,C(?)是n×n階離心力和哥氏力矩陣,其中GB(θ)是n×1階重力矩陣,τ是關(guān)節(jié)力矩,θ、?、?依次是關(guān)節(jié)的角度、角速度、角加速度矩陣。二連桿串聯(lián)機(jī)械臂模型示意圖如圖1所示。

圖1 二連桿串聯(lián)機(jī)械臂示意圖Fig.1 Schematic diagram of two-link series manipulator
基于Lagrange方法得到二連桿串聯(lián)機(jī)械臂動(dòng)力學(xué)參數(shù)為:
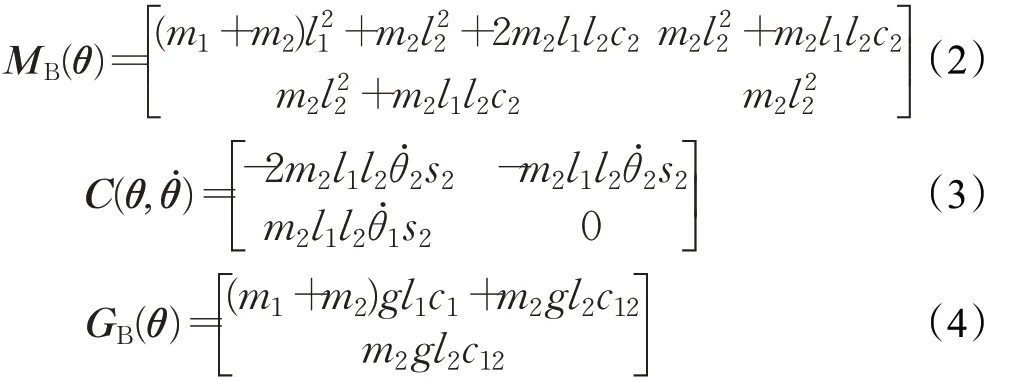
式中,c1=cosθ1,c2=cosθ2,s2=sinθ2,c12=cos(θ1+θ2)。
由于水下機(jī)械臂所處的工作環(huán)境復(fù)雜,控制系統(tǒng)的穩(wěn)定性會(huì)受到水流、摩擦、外部干擾等因素的影響,因此水下機(jī)械臂的動(dòng)力學(xué)分析需要考慮到部件與水流相對(duì)運(yùn)動(dòng)所受的力。
由流體力學(xué)可知,機(jī)械臂在水下的受力主要由水阻力Fd、附加質(zhì)量力Fm、浮力Ff和升力Fl組成。

假設(shè)機(jī)械臂各連桿均是規(guī)則圓柱體,則升力為0。
1.1 水阻力矩和附加質(zhì)量力矩計(jì)算
根據(jù)Morison方程[11],水阻力和附加質(zhì)量力為:

式中,dFd和dFm分別表示連桿單位厚度所受到的水阻力和附加質(zhì)量力,ρ是流體的密度,D表示連桿的直徑,A是水下機(jī)械臂連桿的橫截面積,v是連桿速度函數(shù),Cd是水阻力系數(shù),Cm是附加質(zhì)量力系數(shù)。由于實(shí)際的水阻力系數(shù)和附加質(zhì)量力系數(shù)很難測(cè)量,一般使用常數(shù)。查閱相關(guān)文獻(xiàn)后,本文取Cd=1.1,Cm=1[12]。
1.1.1 水阻力矩
當(dāng)物體運(yùn)動(dòng)時(shí),就會(huì)受到阻力的影響,水阻力就是由于機(jī)械臂與水的相對(duì)運(yùn)動(dòng)引起的。
關(guān)節(jié)1的角速度和關(guān)節(jié)2的角速度?使連桿1產(chǎn)生法向速度,從而導(dǎo)致水阻力矩τD1的產(chǎn)生[13],連桿1的水阻力矩為:
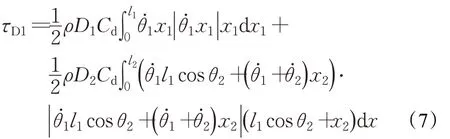
式中,x1是單位厚度dx1距離連桿1底端的長(zhǎng)度,x2是單位厚度dx2距離連桿2底端的長(zhǎng)度,l1是連桿1的長(zhǎng)度,l2是連桿2的長(zhǎng)度。
關(guān)節(jié)1的角速度?和關(guān)節(jié)2的角速度也使得連桿2產(chǎn)生法向速度,進(jìn)而導(dǎo)致水阻力矩τD2的產(chǎn)生[13],同理可得,連桿2的水阻力矩為:

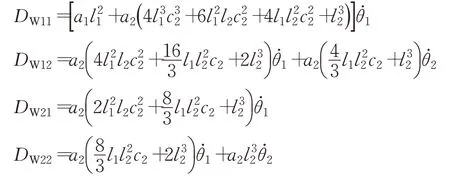
二連桿串聯(lián)機(jī)械臂計(jì)算得到的水阻力矩為:τD=,水阻力矩陣DW為:

其中:
1.1.2 附加質(zhì)量力矩
當(dāng)物體在水中做加速運(yùn)動(dòng)時(shí),物體周圍的水也跟隨其做加速運(yùn)動(dòng),就會(huì)存在一個(gè)作用力使水做加速運(yùn)動(dòng),同時(shí)物體必然受到一個(gè)反作用力,這個(gè)反作用力就稱為附加質(zhì)量力[13]。
連桿1所受的附加質(zhì)量力矩τA1為:
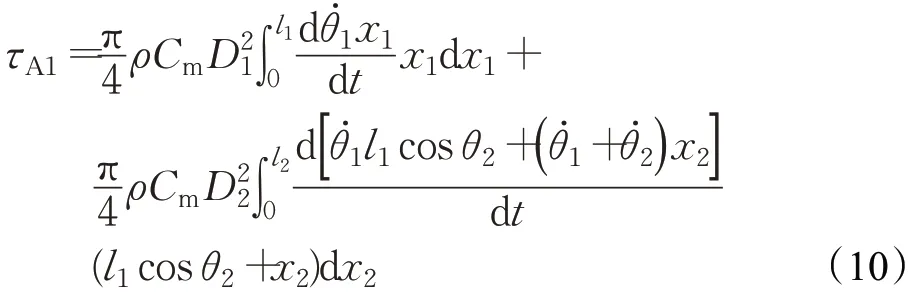
連桿2所受的附加質(zhì)量力矩τA2為:

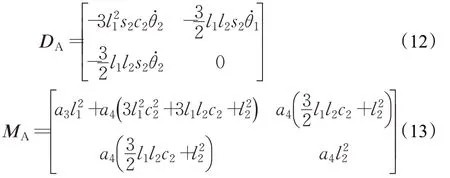
由式(10)和式(11)知,附加質(zhì)量力矩表達(dá)式為:τA=,求得矩陣DA和MA為:
1.2 浮力力矩計(jì)算
由于重力和浮力方向相反,所以假設(shè)連桿重心和浮心重合的情況下,用等效重力代替重力和浮力[14],則等效重力為:

式中,mi是連桿i的重量;g是重力加速度;V i是連桿i的體積;ρ是水的密度;ρi是連桿i的密度。
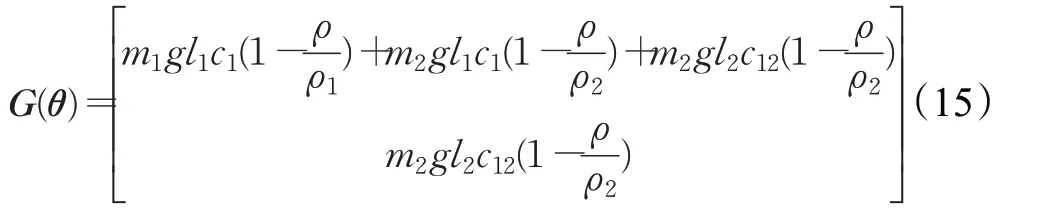
所以兩個(gè)連桿的等效重力G(θ)為:
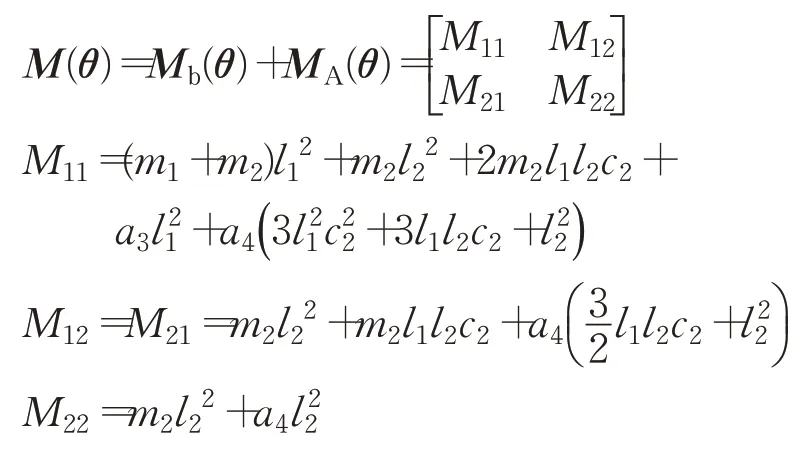
依據(jù)以上分析,建立基于Lagrange和Morison的水下機(jī)械臂動(dòng)力學(xué)模型:

式中,M(θ)=MB(θ)+MA(θ)是含有部分附加質(zhì)量力矩的正定慣性矩陣,表示離心力和哥氏力矩陣,是含有水阻力矩和部分附加質(zhì)量力矩的矩陣,G(θ)∈Rn是等效重力矩陣,表示摩擦力矩陣,τd∈Rn是外部干擾,τ∈Rn是控制力矩。
2 水下機(jī)械臂控制系統(tǒng)設(shè)計(jì)
2.1 水下機(jī)械臂動(dòng)力學(xué)模型分析
設(shè)機(jī)械臂實(shí)際角度為θ(t),目標(biāo)角度為θd(t),則跟蹤誤差為:

定義滑模誤差函數(shù)為:

其中Λ=ΛT>0,聯(lián)立式(17)與式(18),則:

結(jié)合式(16),可得:
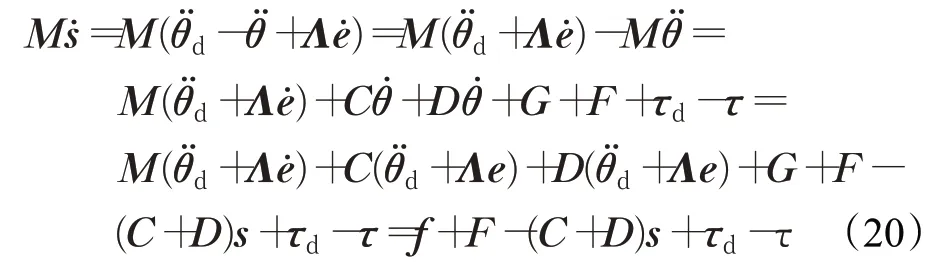
式中:

水下機(jī)械臂動(dòng)力學(xué)模型中的參數(shù)主要分為以上兩類,而大多數(shù)控制算法的改進(jìn)針對(duì)這兩種不同類型的參數(shù)使用同一種控制策略,由于水下機(jī)械臂控制系統(tǒng)的多耦合和非線性的特點(diǎn),單獨(dú)以神經(jīng)網(wǎng)絡(luò)或模糊控制作為控制策略存在局限性,對(duì)于這兩種不同性質(zhì)的參數(shù)使用不同的算法逼近是較為合理的選擇。
對(duì)參數(shù)M、C、D、G使用整體RBF神經(jīng)網(wǎng)絡(luò),不能精確地重構(gòu)機(jī)械臂的水動(dòng)力學(xué)方程[15]。而分塊RBF神經(jīng)網(wǎng)絡(luò)可以對(duì)每個(gè)神經(jīng)網(wǎng)絡(luò)單獨(dú)調(diào)整,從而簡(jiǎn)化了設(shè)計(jì),實(shí)現(xiàn)更快的權(quán)重更新過程。
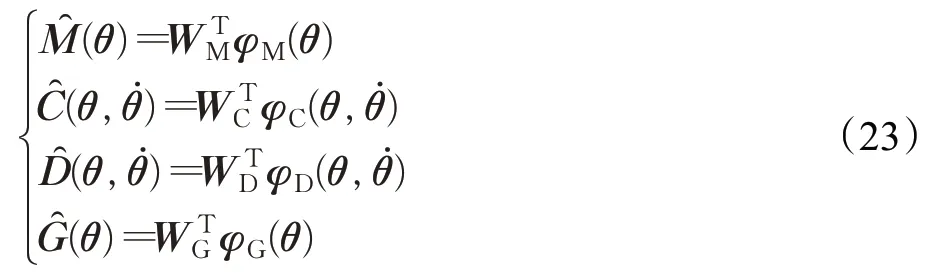
本文擬采用4個(gè)RBF網(wǎng)絡(luò)分別逼近M(θ)、C(?)、D(?)和G(θ)。神經(jīng)網(wǎng)絡(luò)是一種具有高度非線性的連續(xù)時(shí)間動(dòng)力系統(tǒng),它有著很強(qiáng)的自學(xué)習(xí)功能和對(duì)非線性系統(tǒng)的強(qiáng)大映射能力[16]。對(duì)于伺服系統(tǒng)而言,摩擦環(huán)節(jié)是提高系統(tǒng)性能的障礙,使系統(tǒng)響應(yīng)出現(xiàn)爬行、振蕩或穩(wěn)態(tài)誤差[17],本文基于模糊補(bǔ)償摩擦力F(?)的系統(tǒng)控制方法設(shè)計(jì)控制律。
2.2 控制律設(shè)計(jì)
(1)對(duì)f進(jìn)行逼近

式中,ε為神經(jīng)網(wǎng)絡(luò)逼近誤差。使用RBF神經(jīng)網(wǎng)絡(luò),對(duì)(x)中的各項(xiàng)分別進(jìn)行逼近:
自適應(yīng)律取:

(2)對(duì)F的逼近
由于機(jī)械臂的摩擦力只與關(guān)節(jié)角速度相關(guān),因此用于逼近摩擦力的模糊系統(tǒng)可表示為
式中,ξ(?)為模糊系統(tǒng)的基函數(shù)向量,Θ為自適應(yīng)調(diào)節(jié)參數(shù)。
ξ(?)為維向量,其第l1,l2,…,l n個(gè)元素為:
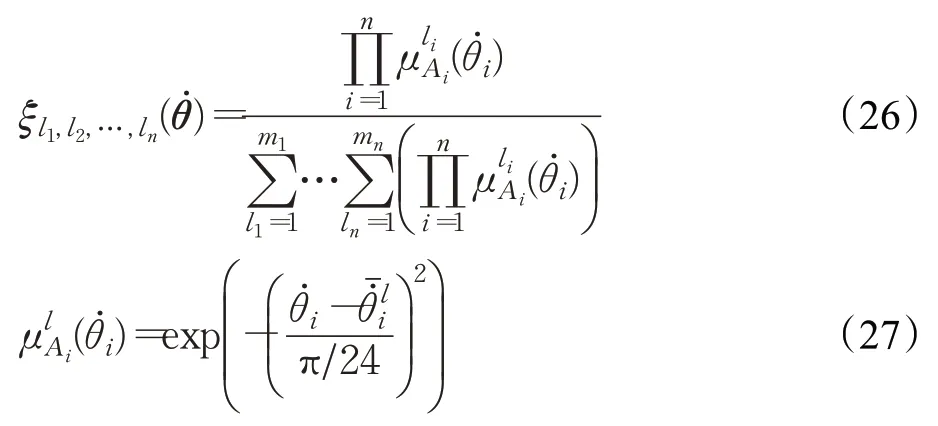
式中,分別為-π/6,-π/12,0,π/12和π/6,θ?i的隸屬函數(shù)如圖2所示。
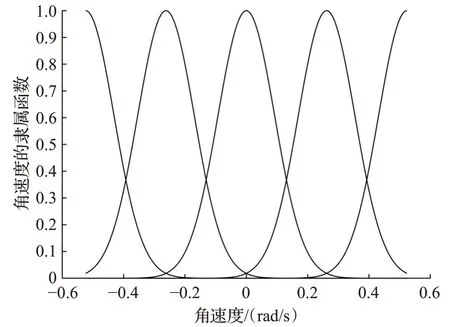
圖2 的隸屬函數(shù)Fig.2 Membership function of?
基于傳統(tǒng)模糊補(bǔ)償?shù)目刂破髟O(shè)計(jì)方法,設(shè)計(jì)模糊系統(tǒng)的自適應(yīng)律為:

得到RBF網(wǎng)絡(luò)和模糊系統(tǒng)的輸出,設(shè)計(jì)控制律為:

式中,RBF神經(jīng)網(wǎng)絡(luò)對(duì)f的估計(jì)值為?,模糊系統(tǒng)對(duì)摩擦力F的補(bǔ)償輸出為?,K v是對(duì)稱正定矩陣,v是克服RBF神經(jīng)網(wǎng)絡(luò)逼近誤差ε的魯棒項(xiàng)。
魯棒項(xiàng)設(shè)計(jì)為:

2.3 穩(wěn)定性分析
定義Lyapunov函數(shù)為:
對(duì)Lyapunov函數(shù)求導(dǎo)可得:
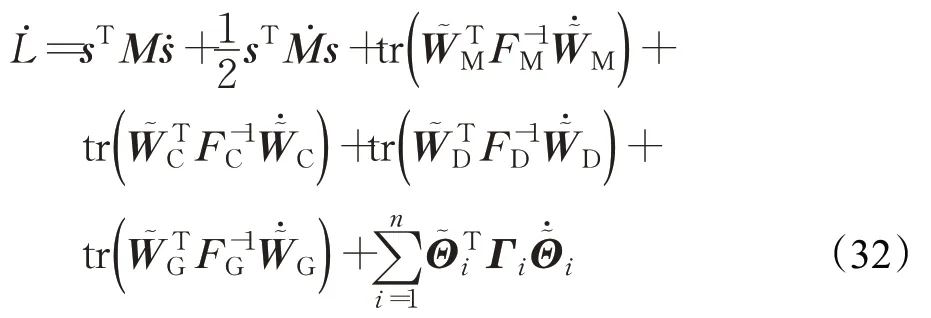
考慮到水下機(jī)械臂動(dòng)力學(xué)的特性,將式(24)和式(28)代入式(32),得:

由于

則?≤0,根據(jù)李雅普諾夫穩(wěn)定性定理,控制系統(tǒng)的穩(wěn)定性可證。
根據(jù)設(shè)計(jì)合適的各種控制函數(shù)項(xiàng)和算法,本文設(shè)計(jì)的水下機(jī)械臂控制原理示意圖如圖3所示。
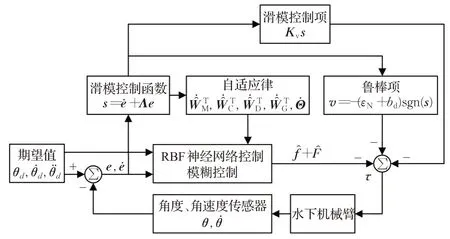
圖3 水下機(jī)械臂控制原理Fig.3 Control principle of underwater manipulator
3 二連桿串聯(lián)水下機(jī)械臂動(dòng)力學(xué)仿真
3.1 仿真參數(shù)
仿真使用的二連桿串聯(lián)水下機(jī)械臂的尺寸為:連桿1的質(zhì)量m1=6 kg,長(zhǎng)度l1=0.45 m,等效直徑D1=0.1 m,密度ρ1=1 698 kg/m3;連桿2的質(zhì)量m2=4 kg,長(zhǎng)度l2=0.275 m,等效直徑D2=0.1 m,密度ρ2=1 852 kg/m3[18]。
二連桿串聯(lián)水下機(jī)械臂的關(guān)節(jié)角度的期望值為θ1d=θ2d=0.1 sint,關(guān)節(jié)角度和角速度的初值設(shè)置為:

二連桿串聯(lián)水下機(jī)械臂水動(dòng)力學(xué)方程參數(shù)設(shè)置為:
(1)帶有部分附加質(zhì)量力矩的慣性矩陣為:
(2)離心力和哥氏力矩陣C(?)由公式(3)求得。
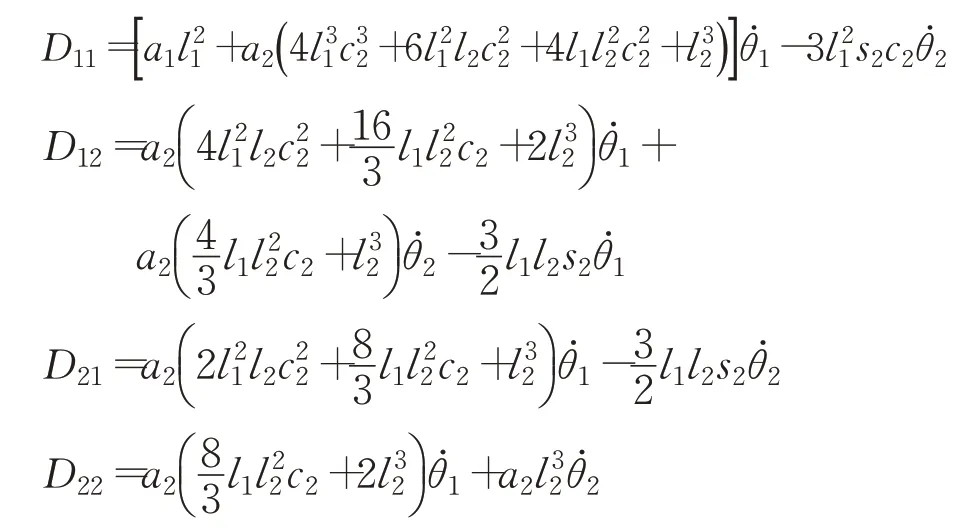
(3)水 阻 力 矩 陣Dw(?)和 部 分 附 加 質(zhì) 量 力 矩DA(?)的矩陣為:

(4)等效重力矩陣G(θ)由公式(15)求得。
(5)摩擦模型為一般模型:庫倫摩擦力+黏性摩擦力,則摩擦力矩陣F(?)為:
其中,K1和K2分別表示庫倫摩擦系數(shù)和黏性摩擦系數(shù),取K1=0.2,K2=3。
(6)假設(shè)外加干擾項(xiàng)和水下機(jī)械臂期望運(yùn)動(dòng)軌跡一致,則外加干擾τd是0.1sint。
二連桿串聯(lián)水下機(jī)械臂控制算法參數(shù)設(shè)置為:
本文四個(gè)RBF神經(jīng)網(wǎng)絡(luò)的高斯函數(shù)中,均值c i取[-1-0.5 0 0.5 1],標(biāo)準(zhǔn)差b=10,權(quán)值矩陣中任意元素初值取0.1,滑模系數(shù)Λ=diag(10,10),K v=diag(30,30),魯棒項(xiàng)中εn=0.1,bd=0.1,自適應(yīng)律中FM、FC、FD、FG取對(duì)角陣,每個(gè)元素取值為100。
3.2 仿真結(jié)果與分析
本文使用了4種方法對(duì)二連桿串聯(lián)水下機(jī)械臂控制系統(tǒng)進(jìn)行仿真實(shí)驗(yàn)。其中,整體RBF神經(jīng)網(wǎng)絡(luò)、分塊RBF神經(jīng)網(wǎng)絡(luò)和本文提出的控制算法的參數(shù)基本一致。關(guān)節(jié)1的輸出力矩仿真如圖4所示,關(guān)節(jié)2的輸出力矩仿真如圖5所示,兩個(gè)關(guān)節(jié)的角度跟蹤曲線如圖6所示,誤差曲線如圖7所示。
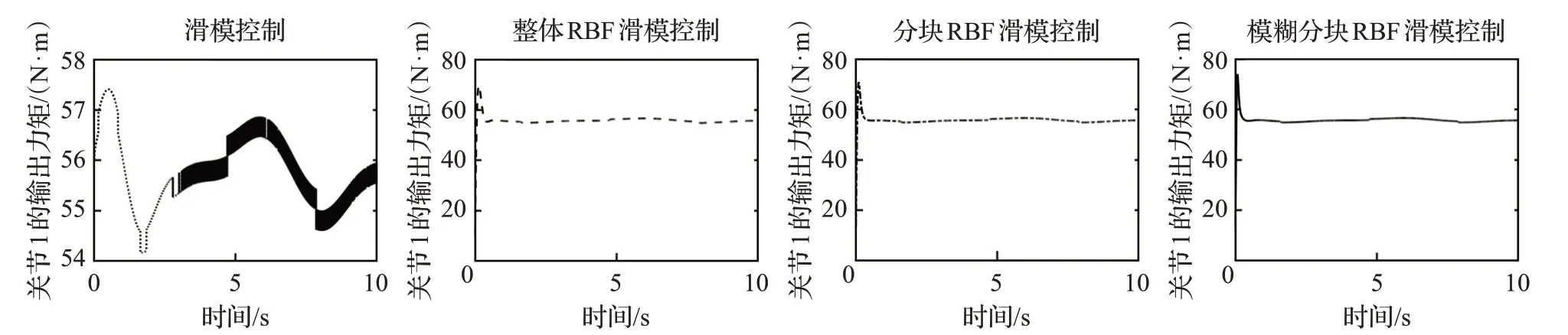
圖4 不同算法下關(guān)節(jié)1的輸出力矩Fig.4 Output torque of joint 1 under different algorithms
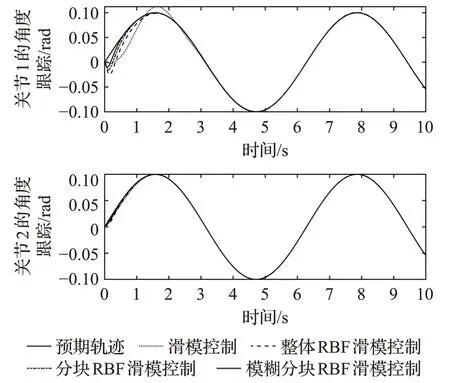
圖6 兩個(gè)關(guān)節(jié)的角度跟蹤Fig.6 Angle tracking of two joints
由圖4和圖5可以得到,本文提出的算法有效地消除了滑模控制算法的天然缺陷——抖振,并且它的響應(yīng)速度更快,能夠更穩(wěn)定、更快地輸出合適的力矩。根據(jù)圖7結(jié)果,對(duì)機(jī)械臂的關(guān)節(jié)角度跟蹤誤差從響應(yīng)速度、均方差、平均誤差和最大誤差四個(gè)方面進(jìn)行分析,結(jié)果如表1所示。
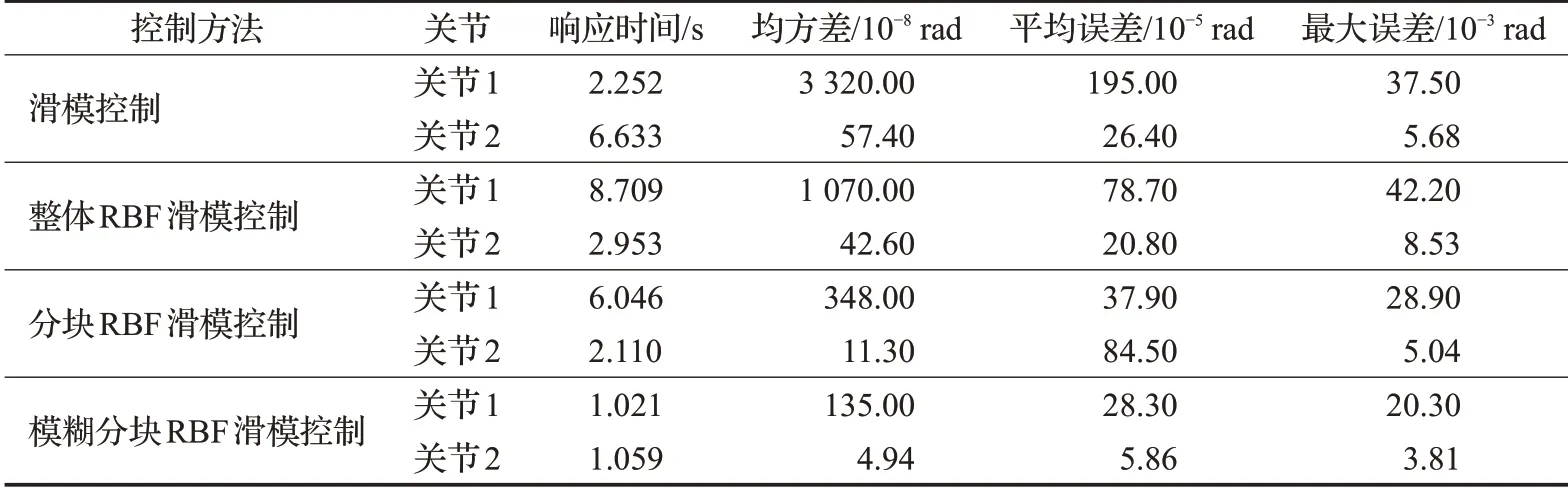
表1 二連桿水下機(jī)械臂各關(guān)節(jié)的角度跟蹤誤差分析Table 1 Angle tracking error analysis of each joint of two-link underwater manipulator
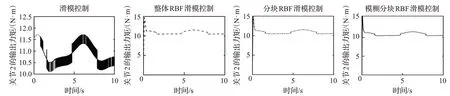
圖5 不同算法下關(guān)節(jié)2的輸出力矩Fig.5 Output torque of joint 2 under different algorithms
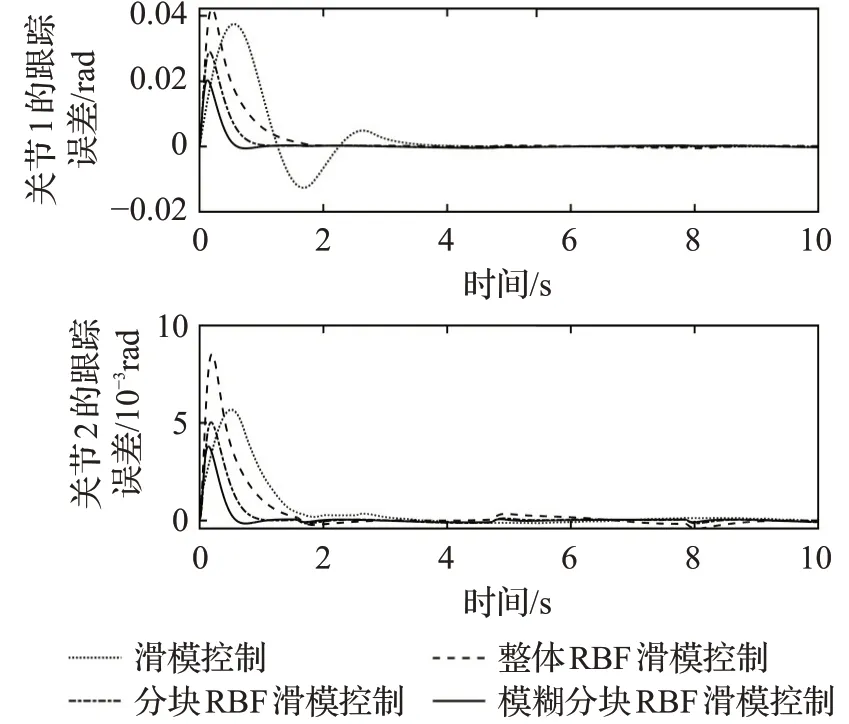
圖7 兩個(gè)關(guān)節(jié)的跟蹤誤差Fig.7 Tracking error of two joints
由表1可知,在二連桿串聯(lián)水下機(jī)械臂控制系統(tǒng)的響應(yīng)時(shí)間上,整體RBF滑模控制的響應(yīng)時(shí)間較長(zhǎng),模糊分塊RBF滑模控制的響應(yīng)時(shí)間相比較其他控制算法大幅度降低,關(guān)節(jié)1的響應(yīng)時(shí)間是1.021 s;關(guān)節(jié)2的響應(yīng)時(shí)間是1.059 s,體現(xiàn)出了本文算法的響應(yīng)速度有了顯著提高。
在水下機(jī)械臂控制系統(tǒng)的軌跡跟蹤誤差上,傳統(tǒng)的滑模控制的均方差、平均誤差和最大誤差都是這四種控制算法中最大的,存在需要改良的缺陷。相比而言,整體RBF滑模控制和分塊RBF滑模控制誤差會(huì)小很多,而本文的模糊分塊RBF滑模算法的誤差是四種控制算法中最小的,關(guān)節(jié)1的均方差是1.35×10-6rad,平均誤差是2.83×10-4rad,最大誤差是2.03×10-2rad;關(guān)節(jié)2的均方差是4.94×10-8rad,平均誤差是5.86×10-5rad,最大誤差是3.81×10-3rad。
本文算法與分塊RBF滑模控制算法對(duì)比,關(guān)節(jié)1的平均誤差降低了25.3%,關(guān)節(jié)2的平均誤差降低了93.1%;與整體RBF滑模控制算法對(duì)比,關(guān)節(jié)1的平均誤差降低了64.0%,關(guān)節(jié)2的平均誤差降低了71.8%;與滑模控制算法對(duì)比,關(guān)節(jié)1的平均誤差降低了85.5%,關(guān)節(jié)2的平均誤差降低了77.8%。結(jié)果表明本文設(shè)計(jì)的模糊分塊RBF滑模控制算法的控制效果要明顯優(yōu)于其他三種控制算法。
4 結(jié)論
本文針對(duì)水下機(jī)械臂控制系統(tǒng)提出了一種基于分塊RBF神經(jīng)網(wǎng)絡(luò)和模糊補(bǔ)償?shù)淖赃m應(yīng)滑模控制算法。該方法使用分塊RBF神經(jīng)網(wǎng)絡(luò)對(duì)動(dòng)力學(xué)模型參數(shù)的不確定項(xiàng)M、C、D、G進(jìn)行逼近,使用模糊系統(tǒng)對(duì)非參數(shù)的不確定項(xiàng)F進(jìn)行補(bǔ)償。并且結(jié)合自適應(yīng)控制、魯棒控制和滑模控制,改善了傳統(tǒng)滑模控制抖振的問題。同時(shí),該方法還降低了水下機(jī)械臂控制系統(tǒng)的跟蹤誤差,提高了水下機(jī)械臂控制系統(tǒng)的響應(yīng)速度、穩(wěn)態(tài)性能和抗擾性能,具有非常重要的實(shí)用價(jià)值。
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
