基于預測控制的衛星能量管理策略研究
2022-08-12 05:50:12趙旖旎雒東陽
電源技術 2022年7期
蔣 碩,章 玄,趙旖旎,雒東陽,付 宇
(中國空間技術研究院通信與導航衛星總體部,北京 100094)
隨著大功率電推進負載、通信載荷時分多址工作模式等大量使用,負載之間的耦合越來越復雜,航天器負載功率的變化越來越頻繁,從而對母線響應能力提出了更高的要求[1]。傳統衛星電源系統由太陽電池陣、蓄電池組、電源控制器組成。衛星一次母線由主誤差放大器(main error amplifier,MEA)統一進行三域控制。MEA 作為三域控制的外環,通常是一個線性PID 控制器。MEA 信號從低至高分為三域,即電池放電控制(battery discharge regulator,BDR)域、電池充電控制(battery charge regulator,BCR)域和光照(SUN)域,相應地,當MEA 信號位于某控制域中時,由對應的變換器控制母線電壓使之穩定[2]。當由于負載或者太陽電池陣輸入功率的變化,電源系統在SUN 域和BDR 域之間切換時,系統的暫態響應較大,尤其是當蓄電池充滿電后,BCR 域相當于形成了死區,導致母線電壓尖峰較大。TAS-B 在下一代電源控制器中提出采用兩域控制代替三域控制,即采用蓄電池充電管理(battery charge management,BCM)控制蓄電池充電,以MEA控制SUN 和BDR 實現母線穩定,這種方法減少了死區,同時也提升了系統跨域暫態響應的性能[3],但是該方法無法改善域內控制的暫態響應。
為了提升DC/DC 控制器的暫態響應性能,有學者提出預測控制策略[4-5]。文獻[6]提出一種針對BUCK 電路的邊界控制方法,文獻[7]提出相應針對BOOST 電路的控制策略。但是這些控制策略很難直接應用在衛星電源系統中。
本文提出了一種適用于衛星電源系統的新型預測控制方法,它通過能量平衡原理來預測目標電流,這種方法在保證穩態特性的同時可以顯著提高母線動態響應性能。本文還分析了衛星電源系統的工作模式及能量流動。最后,通過系統級仿真驗證了本文提出算法的有效性。
1 基于預測控制的衛星能量管理策略
1.1 衛星電源系統拓撲
圖1 所示為典型的衛星電源系統拓撲,其由太陽電池陣、蓄電池組、電源控制器構成。其中,電源控制器由SUN 模塊(BOOST 電路)、BCR 模塊(BUCK 電路)、BDR 模塊組成(BOOST 電路)。
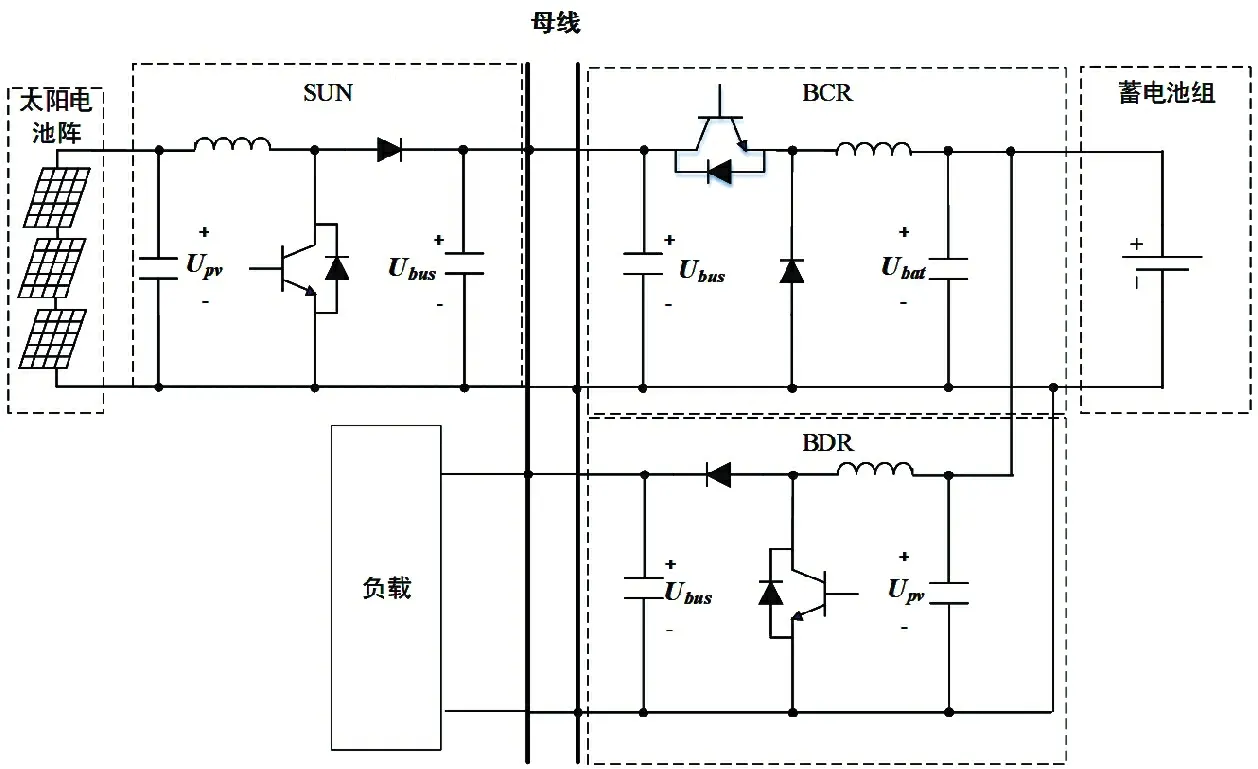
圖1 衛星電源系統拓撲
1.2 BUCK 電路的自然軌跡控制
如圖1 所示,充電調節器通常為BUCK 電路。對BUCK電路進行分析,當BCR 主開關管關斷時,滿足:
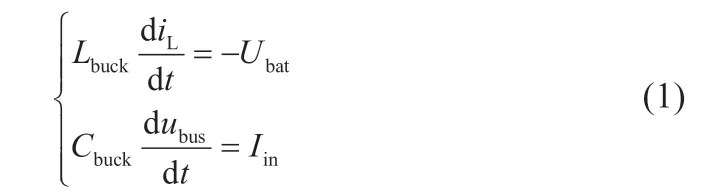
式中:Cbuck為BCR 輸入側電容值;Lbuck為BCR 主通路電感值;Ubat為蓄電池側電壓;Ubus為母線電壓;iL為電感電流;Iin為輸入電流。
當BCR 主開關管接通時,滿足:

由此可推導出BCR 的開關軌跡,滿足:

根據式(3)在相平面圖上畫出其軌跡,如圖2所示。當負載變化導致工作點從A 移動至B,圖2 藍色軌跡為最優時間軌跡,但并非最小電壓變化軌跡。因此在響應時間和電壓跌落之間需要折中,得到一個綜合最優曲線如圖2綠色軌跡所示。
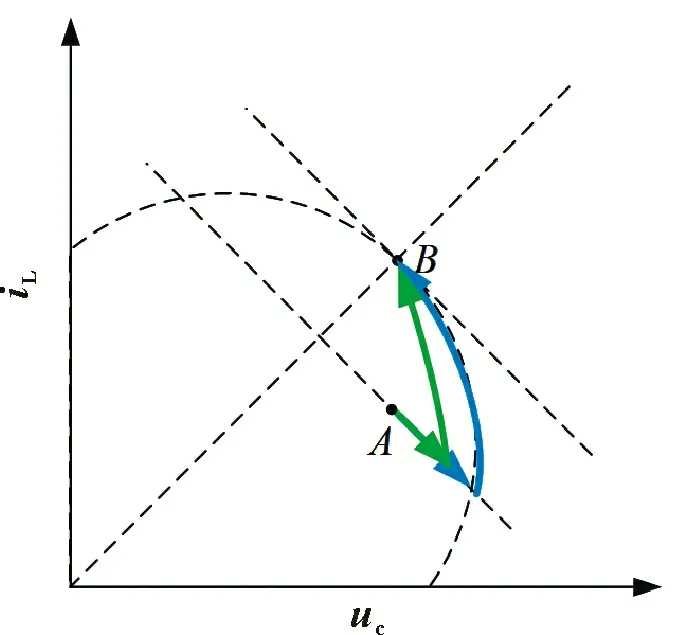
圖2 BCR的開關軌跡
1.3 BOOST 電路的自然軌跡控制
如圖1 所示,SUN 模塊和BDR 模塊通常為BOOST 電路。對BOOST 電路進行分析,當BOOST 主開關管關斷時,滿足:
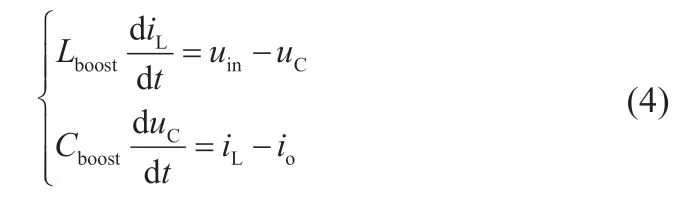
式中:Cboost為輸出側電容值;Lboost為主通路電感值;Uin為輸入側電壓;UC為輸出電容電壓;iL為電感電流;Io為輸出電流。
當BOOST 主開關管接通時,滿足:

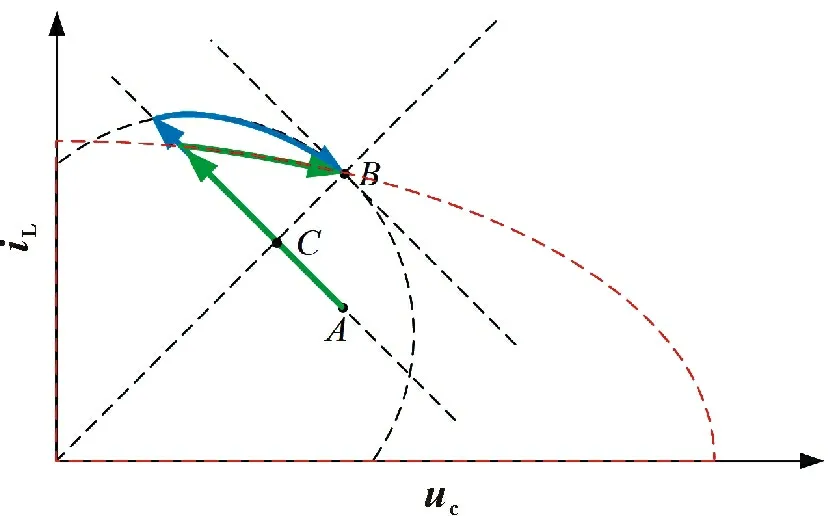
由此可推導出BOOST 電路的開關軌跡,滿足:
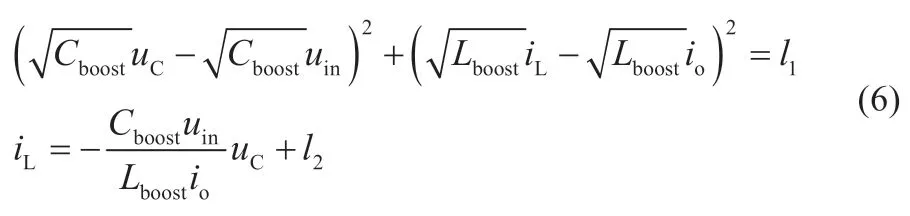
根據式(6)在相平面圖上畫出其軌跡,如圖3 所示。當負載變化導致工作點從A 移動至B,圖2 藍色軌跡為最優時間軌跡,但并非最小電壓跌落軌跡。但轉折點越接近點C,電壓跌落越小,因此同樣在響應時間和電壓跌落之間需要折中,得到一個綜合最優曲線,如圖3 綠色軌跡所示。

圖3 BOOST電路的開關軌跡
1.4 系統控制策略
系統控制策略需考慮下列要求:一是滿足圖2、圖3 中綠色曲線要求,控制策略可使得響應時間和電壓跌落綜合最優;二是需適應BUCK 和BOOST 兩種電路的控制,以保證域間調節的一致性,從而獲得更優的跨域響應。
基于上述要求,本文提出一種基于能量平衡的統一控制方法,滿足:

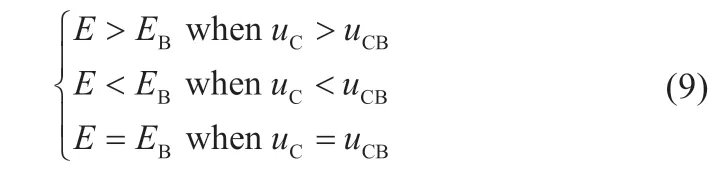
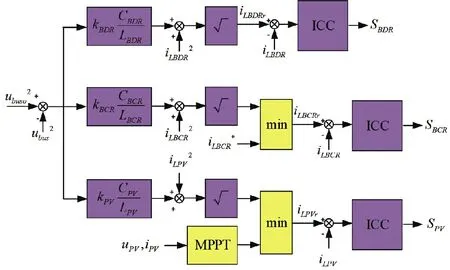
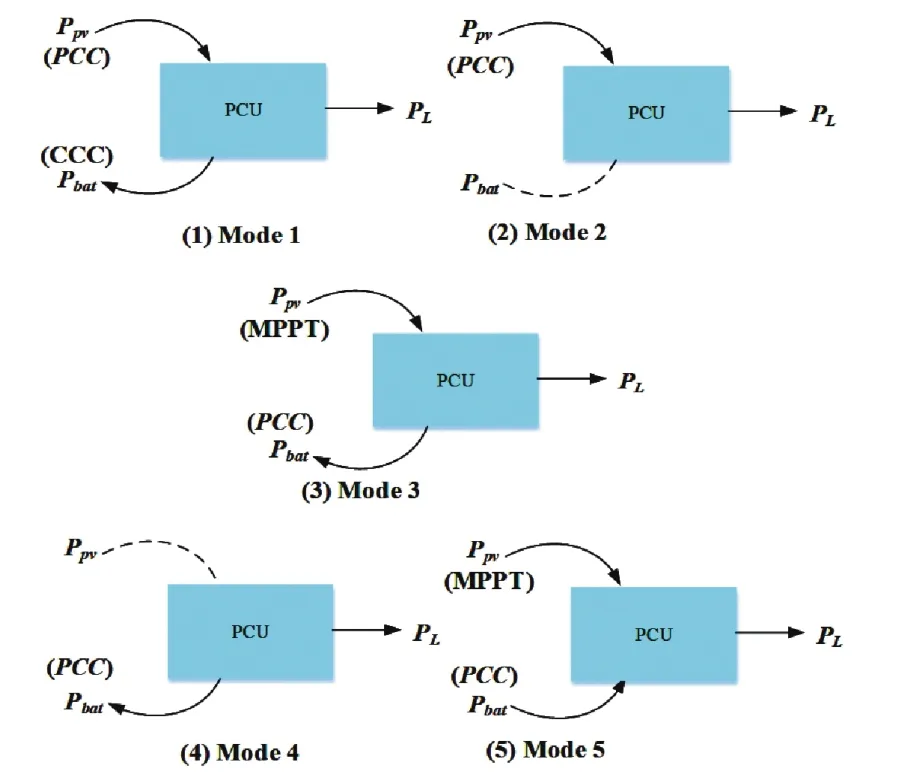
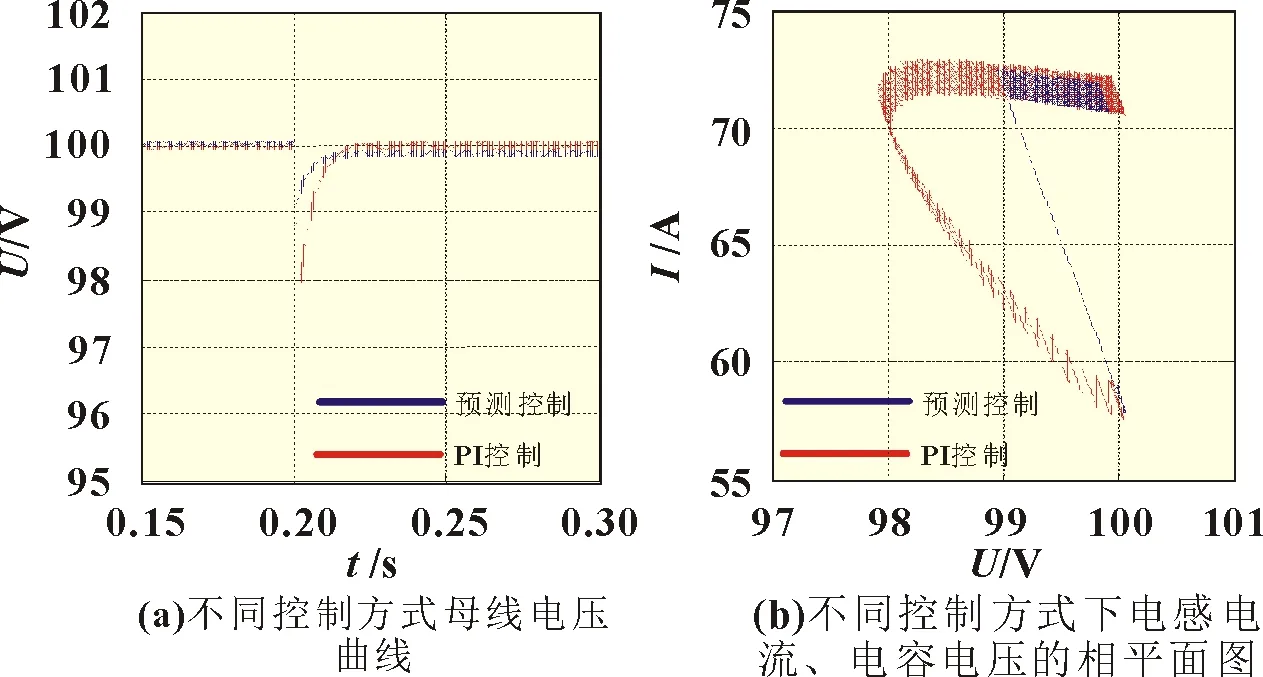
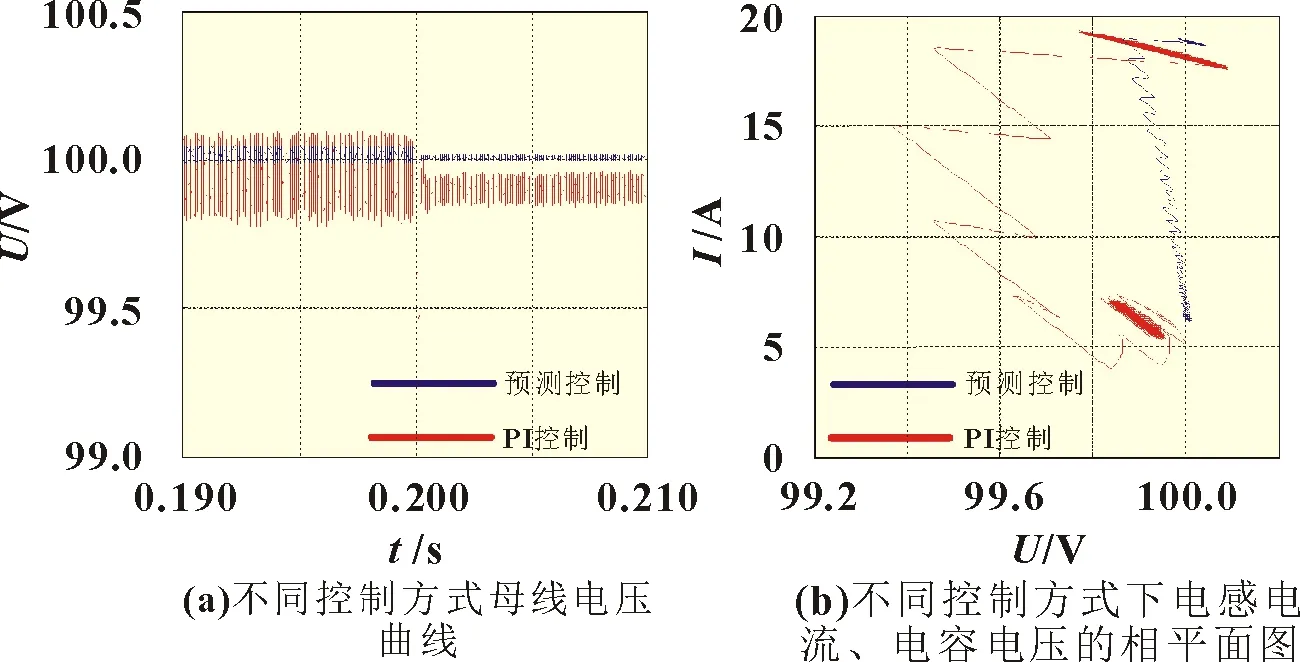
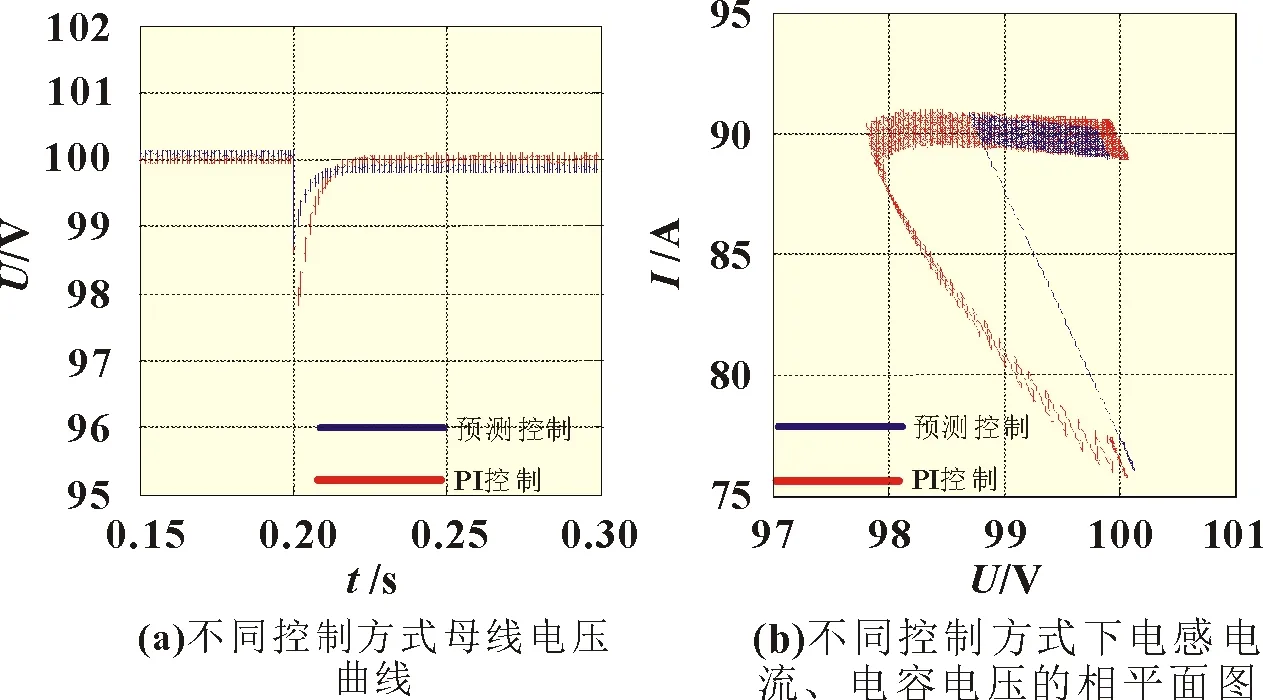
當k>1 時為BUCK 電路控制,當0 圖4 BUCK電路控制軌跡(紅) 圖5 BOOST電路控制軌跡(紅) 對BUCK 變換器,系統當前儲能E與目標工作點B 的儲能EB滿足: 對BOOST 變換器,系統當前儲能E與目標工作點B 的儲能EB滿足: 因此,系統儲能狀態與電容電壓之間的關系是自主的。從式(7)可知,系統控制策略滿足: 電感電流可由式(10)計算得到,該控制策略如圖6 所示。BDR 內環控制指令由該邏輯進行預測控制得到,BCR 內環控制指令由預測控制與恒流控制指令取小得到,SUN 內環控制指令由預測控制邏輯與MPPT 控制取小得到。 圖6 預測控制邏輯圖 從系統架構和控制邏輯,分析衛星電源系統的工作模式和能量流,如圖7 所示。 圖7 5種模式下的能量流示意圖 不同模式下各模塊控制策略和控制對象如表1 所示。母線電壓采用電流預測控制(predictive current control,PCC)方法。根據預測控制的不同執行機構,可將系統的5 種工作模式劃分為3 域,分別為SUN 域(PCC 的執行機構為SUN 模塊)、BCR 域(PCC 的執行機構 為BCR 模塊)以及BDR 域(PCC 的 執行機構為BDR 模塊)。 表1 不同模式下的控制策略和控制對象一覽表 通過MATLAB/Simulink 對本文提出的控制策略進行驗證。如表2 所示,母線電壓額定值為100 V,太陽翼的最大輸出電流為80 A,充電電流的上限為20 A,設置的仿真場景分別工作在3 個工作域中。 表2 仿真場景設置 通過仿真,不同場景下的母線電壓以及電感電流、電容電壓的相平面圖如圖8~10 所示。 圖8 預測控制與PI控制對比(SUN域) 圖9 預測控制與PI控制對比(BCR域) 圖10 預測控制與PI控制對比(BDR 域) 場景1 中,0.2 s 時,負載電流從30 A 階躍至40 A,蓄電池仍以最大充電電流充電,系統處于SUN 域。傳統PI 控制下,母線電壓跌落最低為99.37 V,母線電壓跌落時間為24 ms;在預測控制下,開關管接通一段時間,系統沿直線達到預測控制點處,接著通過預測控制開展開關控制,使得系統沿預測控制的橢圓到達穩態,母線電壓跌落最低為98.95 V,母線電壓跌落時間為12 ms。 場景2 中,0.2 s 時,負載電流從65 A 階躍至75 A,此時蓄電池充電電流指令由18.75 A 變化至6.25 A,均小于最大充電電流,系統處于BCR 域。傳統PI 控制下,母線電壓跌落最低為99.37 V,母線電壓跌落時間為0.2 ms;在預測控制下,開關管接通一段時間,系統工作點沿開關開通圓弧達到預測控制點處,接著通過預測控制開展開關控制,使得系統沿預測控制的橢圓到達穩態,母線電壓跌落最低為99.87 V,母線電壓跌落時間為0.1 ms。 場景3 中,0.2 s 時,負載電流從140 A 階躍至150 A,蓄電池放電電流由76.5 A 增加至90 A,系統處于BDR 域。傳統PI控制下,母線電壓跌落最低為97.82 V,母線電壓跌落時間為23 ms;在預測控制下,開關管接通一段時間,系統沿直線達到預測控制點處,接著通過預測控制開展開關控制,使得系統沿預測控制的橢圓到達穩態,母線電壓跌落最低為98.71 V,母線電壓跌落時間為10 ms。 本文提出了一種新型電流預測控制方法可用于衛星電源系統中,基于能量平衡理論預測被控電流的變化,相比傳統PI 控制,在保證穩態性能的同時獲得了更加優越的動態響應能力。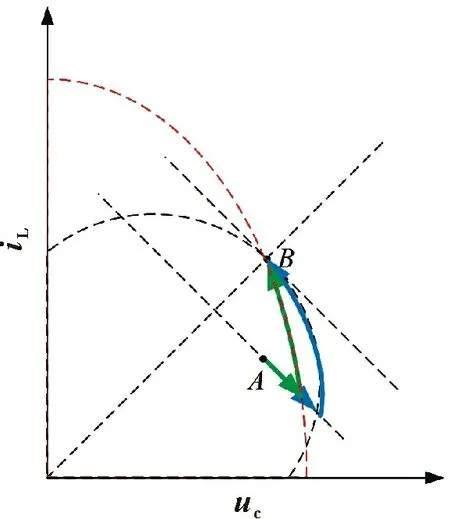

2 能量流分析

3 仿真驗證

4 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26